











-
The navigation mechanism of obtaining phase parameters based on quantum theory can break through the limitation of classical physical limit to navigation accuracy. In order to achieve the accurate estimation of the coherent state phase, it is usually assumed that the local oscillator phase must be orthogonal to the coherent state phase in the method of quantum homodyne detection. However, the coherent state phase is unknown and the hypothesis cannot be guaranteed to be correct in practice. In this paper we design a nonlinear phase-locked loop to solve the problem. Firstly, in order to obtain the Wigner distribution for a coherent state, we start with the Wigner distribution for the vacuum state and analyze the noise characteristics according to Wigner distribution of coherent state, then the output of homodyne detection is derived. Secondly, in order to avoid introducing errors in theory, caused by linearization and cope with the limiting requirement between local oscillator phase and coherent state phase in the phase tracking of coherent state, we design an orthogonal simplex cubature Kalman filter (OSCKF) algorithm to achieve the function of the nonlinear phase-locked loop. The algorithm converges by updating the state of the local oscillator phase multiple times, and then, the accurate coherent phase is obtained. Finally, according to the design of the phase-locked loop, we observe the data of homodyne detection and then verify the correctness of the OSCKF algorithm. The simulation results show that the OSCKF can converge to the real phase after observing 200 sampled data and the accuracy is higher than extended Kalmn filter (EKF) and cubature Kalman filter (CKF), and the real phase can be obtained under different local oscillator phase. In conclusion, the nonlinear phase-locked loop based on OSCKF algorithm breaks the limitation of traditional way in which the initial local oscillator phase is required to be orthogonal to the coherent state phase, and effectively avoid the linearization error and improve the anti-nonlinear ability. It is very significant in theory and application .
-
Keywords:
- coherent state phase estimation /
- quantum homodyne detection /
- nonlinear phase-locked loop /
- orthogonal simplex cubature Kalman filter
[1] He R K, Chen S X, Wu H, Xu H, Chen K, Liu J 2019 IEEE Access 7 2686
[2] Zhang Z T, Zhang J S 2010 Chin. Phys. B 19 104601
 Google Scholar
Google Scholar
[3] Furuya K, Nemoto T, Kato K, Shoji Y, Mizumoto T 2016 J. Lightwave Technol. 34 1699
Google Scholar
[4] 胡志辉, 冯久超 2011 物理学报 60 070505
Hu Z H, Feng J C 2011 Acta Phys. Sin. 60 070505 (in Chinese)
[5] Leonhardt U, Vaccaro J A, Böhmer B, Paul H 1995 Phys. Rev. A 51 84
Google Scholar
[6] Berry D W, Wiseman H M 2002 Phys. Rev. A 65 043803
Google Scholar
[7] Joo J, Park k, Jeong H, Munro W J, Nemoto K, Spiller T P 2012 Phys. Rev. A 86 043828420
[8] Caves C M 1981 Phys. Rev. D 23 1693
Google Scholar
[9] Bondurant R S, Shapiro J H 1984 Phys. Rev. A 30 2548
Google Scholar
[10] Yuen H P, Chan V W S 1983 Opt. Lett. 8 177
Google Scholar
[11] Jin X L, Su J, Zheng Y H, Chen C Y, Wang W Z, Peng K C 2015 Opt. Express 23 23859
Google Scholar
[12] Wiseman H M 1995 Phys. Rev. Lett. 75 4587
Google Scholar
[13] Armen M A, Au J K, Stockton J K, Doherty A C, Mabuchi H 2002 Phys. Rev. Lett. 89 133602
Google Scholar
[14] Berry D W, Wiseman H M 2006 Phys. Rev. A 73 063824
Google Scholar
[15] Tsang M, Shapiro J H, Lloyd S 2008 Phys. Rev. A 78 053820
Google Scholar
[16] Tsang M, Shapiro J H, Lloyd S 2009 Phys. Rev. A 79 053843
Google Scholar
[17] Tsang M, Shapiro J H, Lloyd S 2009 International Quantum Electronics Conference Baltimore Maryland, May 31–June 5, 2009 p6
[18] Wu H, Chen S X, Yang B F, Chen K 2016 J. Guid. Control. Dynam. 39 1866
[19] Zhang L, Li S, Zhang E, Chen Q 2017 IET Sci. Meas. Technol. 11 929
Google Scholar
[20] Wu H, Chen S X, Yang B F, Luo X 2016 IET Sci. Meas. Technol. 10 370
Google Scholar
[21] Li S E, Xu S, Kum D 2016 Neurocomputing 177 363
Google Scholar
[22] Liu H, Wu W 2017 Sensors 17 741
Google Scholar
[23] Chang L, Hu B, Li A 2013 IEEE Trans. Autom. Control 58 252
Google Scholar
-
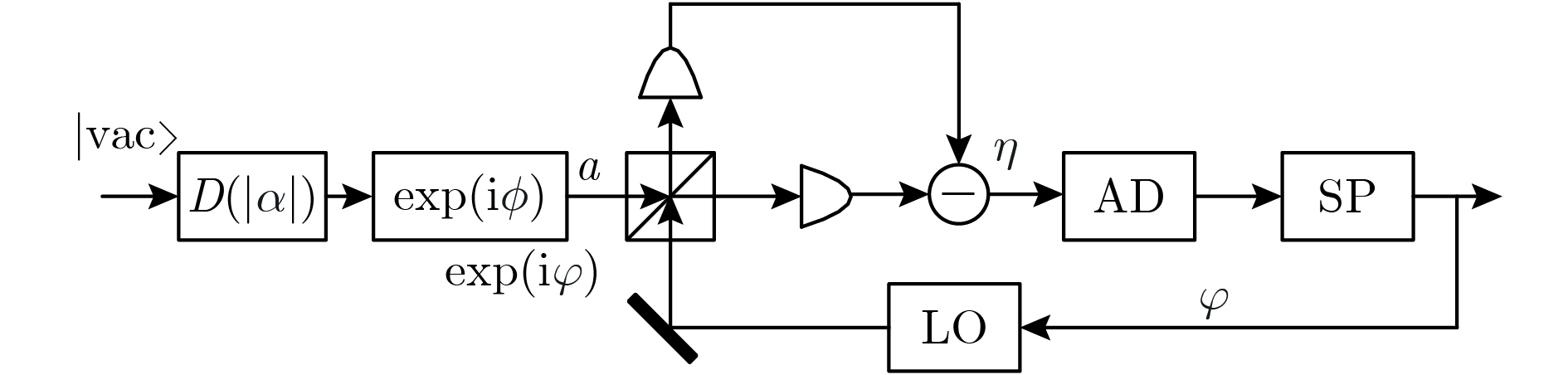
图 1 数字零拍锁相环
Figure 1. Digital homodyne phase-lock loop.

图 2 基于OSCKF算法的量子非线性数字锁相环
Figure 2. Digital quantum nonlinear phase-lock loop based on OSCKF algorithm.
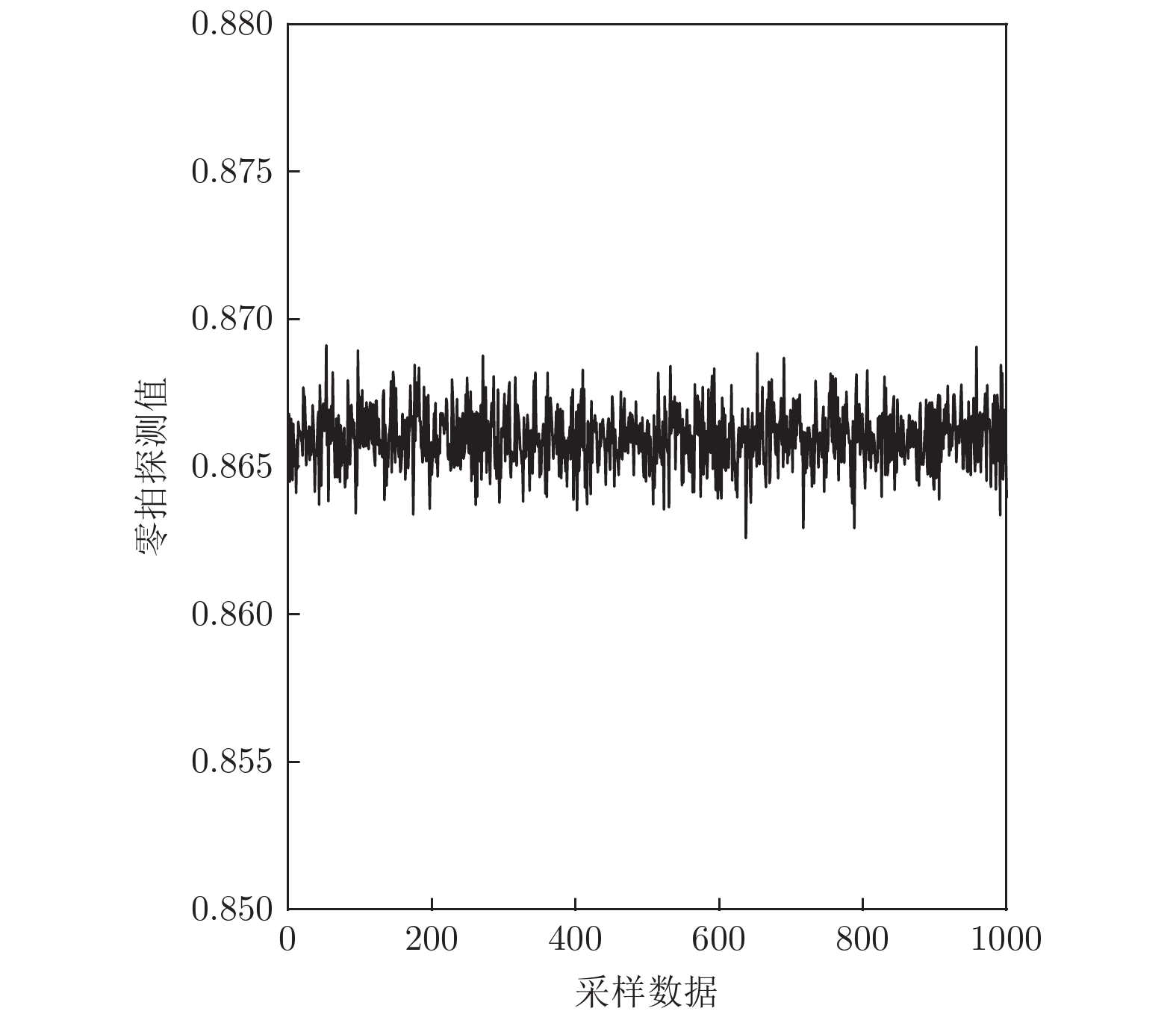
图 3 零拍数据示意图
Figure 3. Homodyne data schematic diagram.

图 4 不同初始本振相位下所提方法的性能
Figure 4. Performance comparison of phase-locked loop in different local oscillator phase.
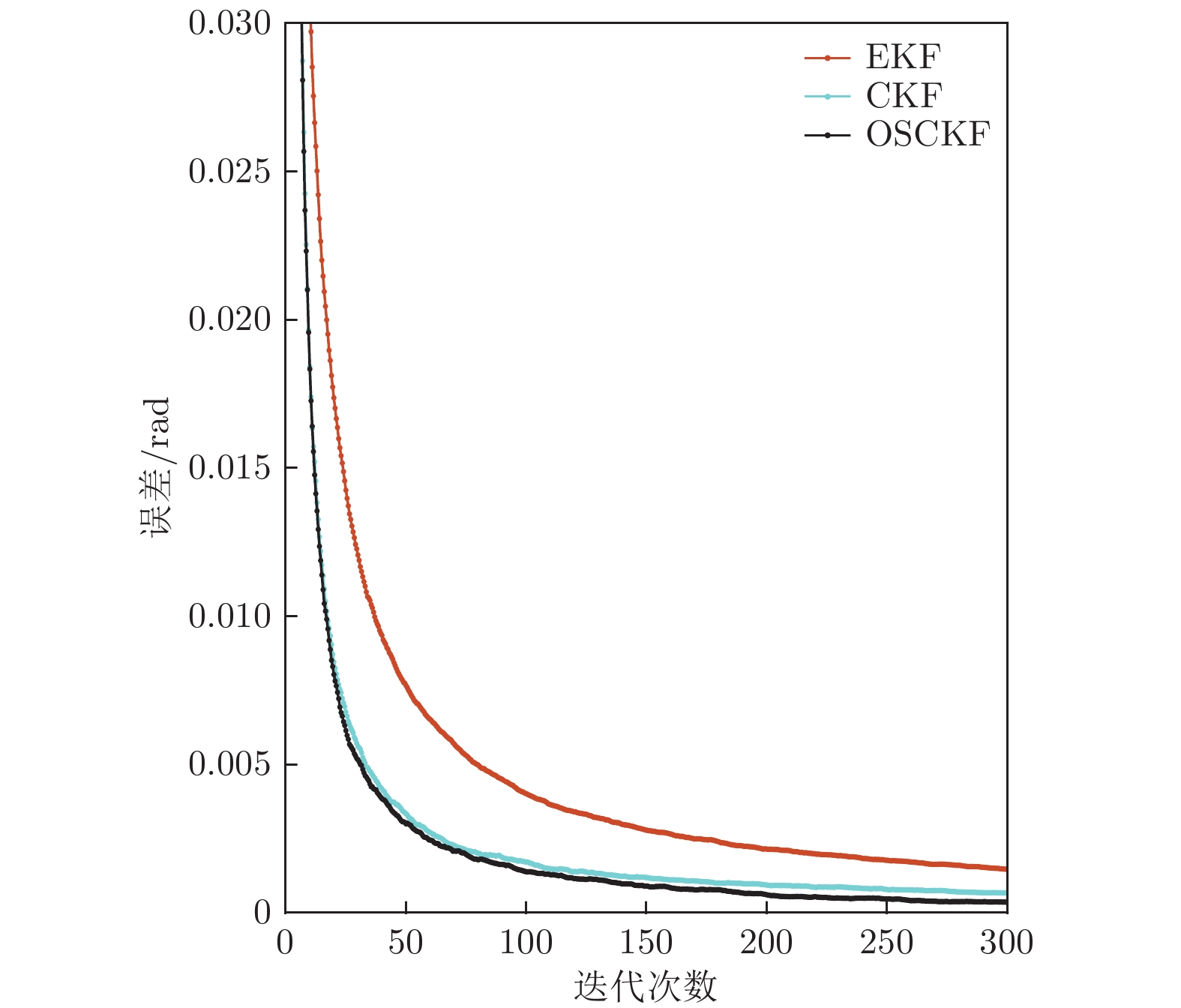
图 5 各算法误差收敛曲线
Figure 5. Convergence curve of various algorithms.
-
[1] He R K, Chen S X, Wu H, Xu H, Chen K, Liu J 2019 IEEE Access 7 2686
[2] Zhang Z T, Zhang J S 2010 Chin. Phys. B 19 104601
Google Scholar
[3] Furuya K, Nemoto T, Kato K, Shoji Y, Mizumoto T 2016 J. Lightwave Technol. 34 1699
Google Scholar
[4] 胡志辉, 冯久超 2011 物理学报 60 070505
Hu Z H, Feng J C 2011 Acta Phys. Sin. 60 070505 (in Chinese)
[5] Leonhardt U, Vaccaro J A, Böhmer B, Paul H 1995 Phys. Rev. A 51 84
Google Scholar
[6] Berry D W, Wiseman H M 2002 Phys. Rev. A 65 043803
Google Scholar
[7] Joo J, Park k, Jeong H, Munro W J, Nemoto K, Spiller T P 2012 Phys. Rev. A 86 043828420
[8] Caves C M 1981 Phys. Rev. D 23 1693
Google Scholar
[9] Bondurant R S, Shapiro J H 1984 Phys. Rev. A 30 2548
Google Scholar
[10] Yuen H P, Chan V W S 1983 Opt. Lett. 8 177
Google Scholar
[11] Jin X L, Su J, Zheng Y H, Chen C Y, Wang W Z, Peng K C 2015 Opt. Express 23 23859
Google Scholar
[12] Wiseman H M 1995 Phys. Rev. Lett. 75 4587
Google Scholar
[13] Armen M A, Au J K, Stockton J K, Doherty A C, Mabuchi H 2002 Phys. Rev. Lett. 89 133602
Google Scholar
[14] Berry D W, Wiseman H M 2006 Phys. Rev. A 73 063824
Google Scholar
[15] Tsang M, Shapiro J H, Lloyd S 2008 Phys. Rev. A 78 053820
Google Scholar
[16] Tsang M, Shapiro J H, Lloyd S 2009 Phys. Rev. A 79 053843
Google Scholar
[17] Tsang M, Shapiro J H, Lloyd S 2009 International Quantum Electronics Conference Baltimore Maryland, May 31–June 5, 2009 p6
[18] Wu H, Chen S X, Yang B F, Chen K 2016 J. Guid. Control. Dynam. 39 1866
[19] Zhang L, Li S, Zhang E, Chen Q 2017 IET Sci. Meas. Technol. 11 929
Google Scholar
[20] Wu H, Chen S X, Yang B F, Luo X 2016 IET Sci. Meas. Technol. 10 370
Google Scholar
[21] Li S E, Xu S, Kum D 2016 Neurocomputing 177 363
Google Scholar
[22] Liu H, Wu W 2017 Sensors 17 741
Google Scholar
[23] Chang L, Hu B, Li A 2013 IEEE Trans. Autom. Control 58 252
Google Scholar

 DownLoad:
DownLoad:
Catalog
Metrics
- Abstract views: 9409
- PDF Downloads: 0
- Cited By: 0
