










-
海洋环境噪声场中包含了海洋中的诸多信息, 海底地声参数是影响海洋环境噪声场空间分布的主要因素之一. 对于不同的海底分层结构, 海底反射损失会根据沉积层厚度和各层声速呈现出不同的临界角和干涉条纹结构. 本文利用Harrison能流理论, 从理想反射系数出发, 分别考虑了声速、密度、衰减系数、沉积层厚度等几种参数对无沉积层和单层沉积层中反射系数的影响, 并对单层沉积层海底的反射系数进行了化简, 结合互易原理解释了反射损失条纹结构的形成机理. 中国黄海某海区试验结果表明, 利用海洋环境噪声空间方向谱获得的海底反射损失, 可以提取海底反射临界角和干涉条纹信息, 由此可估计出海底分层结构、声速和沉积层厚度等海底参数信息.
-
关键词:
- 海洋环境噪声空间特性 /
- 海底反射损失 /
- 海底地声参数估计
The field of ocean ambient noise contains numerous information about the water column, especially the information about the sub-bottom. The geoacoustics parameters of sub-bottom are very important factors influencing the spatial characteristics of ocean ambient noise field. For different layered structures of the sub-bottom, the bottom-loss shows different critical angles according to sound speed of each layer, while the structure of interference fringe is dependent on the thickness of the sediment. Flux theory of ocean ambient noise proposed by Harrison is used in this paper. Using this theory, the curve of bottom-loss can be extracted by computing the ratio between the energy of the upward wave and the downward wave. From the ideal reflection coefficient, the influence of sound speed, density and attenuation coefficient on reflection coefficient are discussed in the situation of the sub-bottom of acoustic half space, while the reflection coefficient of 1 layer of sediment is simplified. Initially, the reflection coefficient is the sum of sound waves reflect from the sub-bottom transmitted from the same source at the same angle. Only the first two terms are reserved, so that the mechanism of the interference fringe can be easily discussed. The structure of interference fringe can be explained which is affected by the thickness of the sediment. The curve of bottom-loss oscillates periodically with the increase of the thickness of the sub-bottom. Also by the reciprocity principle, the interference fringe of the reflection coefficient can be explained by considering the sound transmitted from two point sources at the surface of the sea. In this way the same result can be obtained as that from the method of simplification. The result of the experiment in China Yellow Sea shows that the information about the reflection coefficient of the sub-bottom can be extracted by the vertical azimuth spectrum of ocean ambient noise. In this way, the critical angle can be obtained, so that the sound speed of the sub-bottom can be estimated by using Snell law. The structure of the interference fringe is also contained in the bottom-loss curve estimated by ocean ambient noise. Therefore the layered structure, sound speed and the thickness of the layer of the sub-bottom can be estimated.-
Keywords:
- spatial characteristics of ocean ambient noise /
- bottom-loss /
- estimating geoacoustics parameters of sub-bottom
[1] Wenz G M 1962 J. Acoust. Soc. Am. 34 1936
 Google Scholar
Google Scholar
[2] Kuperman W A, Ingenito F 1980 J. Acoust. Soc. Am. 67 1988
Google Scholar
[3] HarrisonC H 1996 J. Acoust. Soc. Am. 99 2055
Google Scholar
[4] 林建恒 2002 博士学位论文 (北京: 中国科学院研究生院)
Lin J H 2002 Ph. D. Dissertation (Beijing: Graduate University of Chinese Academy of Science) (in Chinese)
[5] 张乾初 2017 博士学位论文 (北京: 中国科学院大学)
Zhang Q C 2017 Ph. D. Dissertation (Beijing: University of Chinese Academy of Science) (in Chinese)
[6] 郭新毅, 铁广鹏, 李凡, 马力 2014 物理 43 723
Guo X Y, Tie G P, Li F, Ma L 2014 Physics 43 723
[7] 江鹏飞, 林建恒, 孙军平, 衣雪娟 2017 物理学报 66 014306
Google Scholar
Jiang P F, Lin J H, Sun J P, Yi X J 2017 Acta Phys. Sin. 66 014306
Google Scholar
[8] 蒋光禹, 孙超, 谢磊, 刘雄厚 2019 物理学报 68 024302
Google Scholar
Jiang G Y, Sun C, Xie L, Liu X H 2019 Acta Phys. Sin. 68 024302
Google Scholar
[9] Zeng J, Chapman N R, Bonnel J 2013 J. Acoust. Soc. Am. 134 EL394
Google Scholar
[10] 李梦竹, 李整林, 周纪浔, 张仁和 2019 物理学报 68 094301
Google Scholar
Li M Z, Li Z L, Zhou J X, Zhang R H 2019 Acta Phys. Sin. 68 094301
Google Scholar
[11] 周建波, 朴胜春, 刘亚琴, 张海刚, 屈科, 李晓曼, 张明辉 2019 声学学报 44 337
Zhou J B, Piao S C, Liu Y Q, Zhang H G, Qu K, Li X M, Zhang M H 2019 Acta Acoust. 44 337
[12] 江鹏飞, 林建恒, 马力, 殷宝友, 蒋国建 2016 声学学报 41 59
Jiang P F, Lin J H, Ma Li, Yin B Y, Jiang G J 2016 Acta Acoust. 41 59
[13] 骆文于 2002 博士学位论文 (北京: 中国科学院声学研究所)
Luo W Y 2002 Ph. D. Dissertation (Beijing: Institute of Acoustics, Chinese Academy of Science) (in Chinese) (in Chinese)
[14] 布列霍夫斯基Л М 著 (山东省海洋学院海洋物理系, 中国科学院声学研究所水声研究室 译) 1983 海洋声学 (北京: 科学出版社) 第516−520页
Бреховских Л М (translated by Department of Oceanophysics Shandong College of Oceanology, Laboratory of Underwater Acoustic Institute of Acoustics Chinese Academy of Science) 1983 Fundamentals of Ocean Acoustics (Beijing: Science Press) pp516−520 (in Chinese)
[15] Harrison C H, Simons D G 2002 J. Acoust. Soc. Am. 112 1377
Google Scholar
[16] Harrison C H 2004 J. Acoust. Soc. Am. 115 1505
Google Scholar
[17] Siderius M, Harrison C H, Porter M B 2006 J. Acoust. Soc. Am. 120 1315
Google Scholar
[18] Muzi L, Siderius M, Quijano J E, Dosso S E 2015 J. Acoust. Soc. Am. 137 481
[19] Muzi L, Siderius M, Nielsen P L 2016 J. Acoust. Soc. Am. 140 1513
[20] Schmidt H 2004 OASES version 3.1 User Guide and Reference Manual (Cambridge, MA: Massachusetts Institute of Technology)
[21] Jensen F B, KupermanW A, Porter M B, Schmidt H 2011 Computational Ocean Acoustics (2nd Ed.) (New York: Springer) pp38−43
[22] Zeng J, Zhao Z D, Peng D Y, Ma L, Shang E C 2019 J. Acoust. Soc. Am. 145 EL243
Google Scholar
-
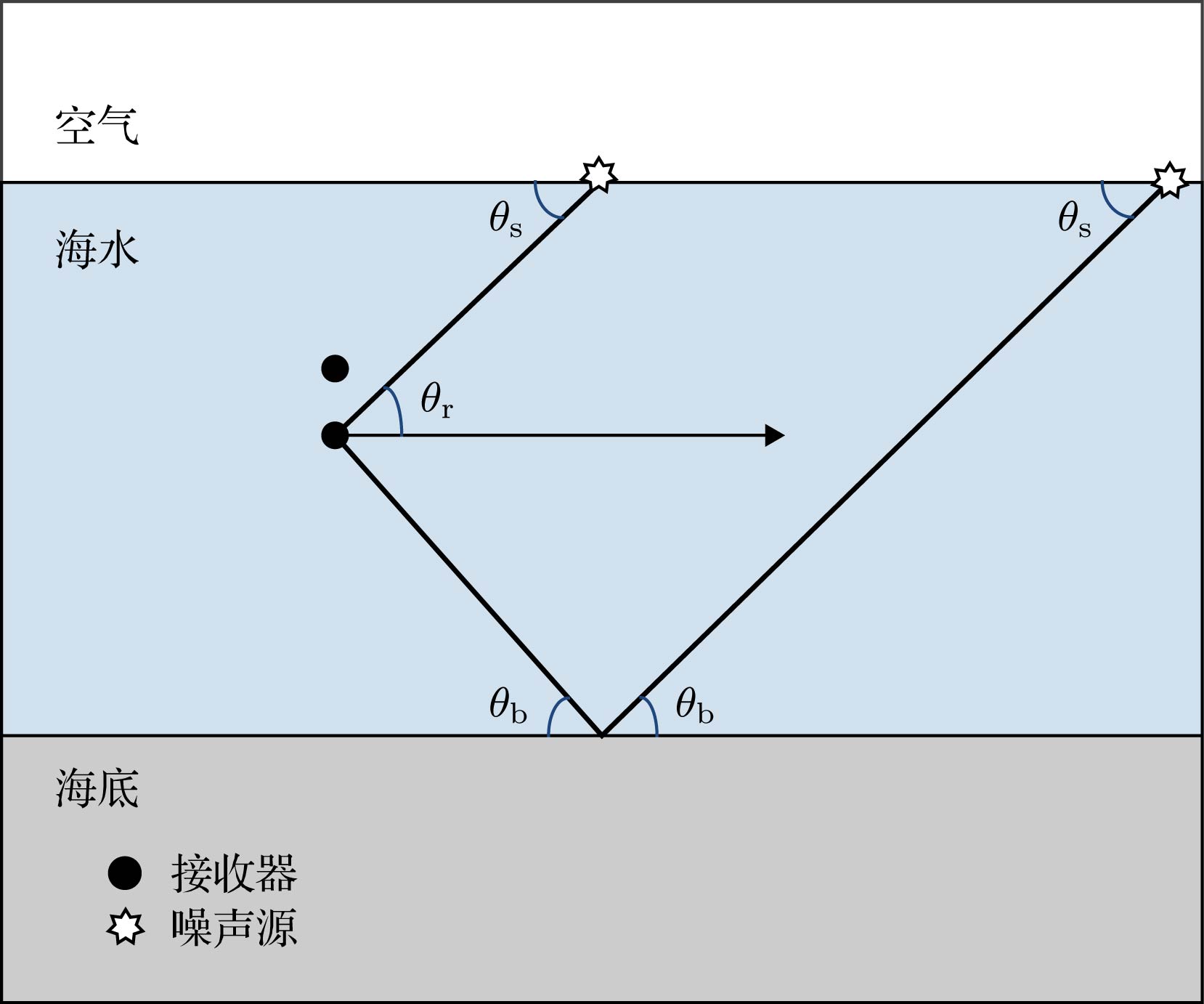
图 1 浅海中利用垂直阵接收噪声空间结构
Fig. 1. Spatial structure of receiving ocean ambient noise using vertical line array in shallow water
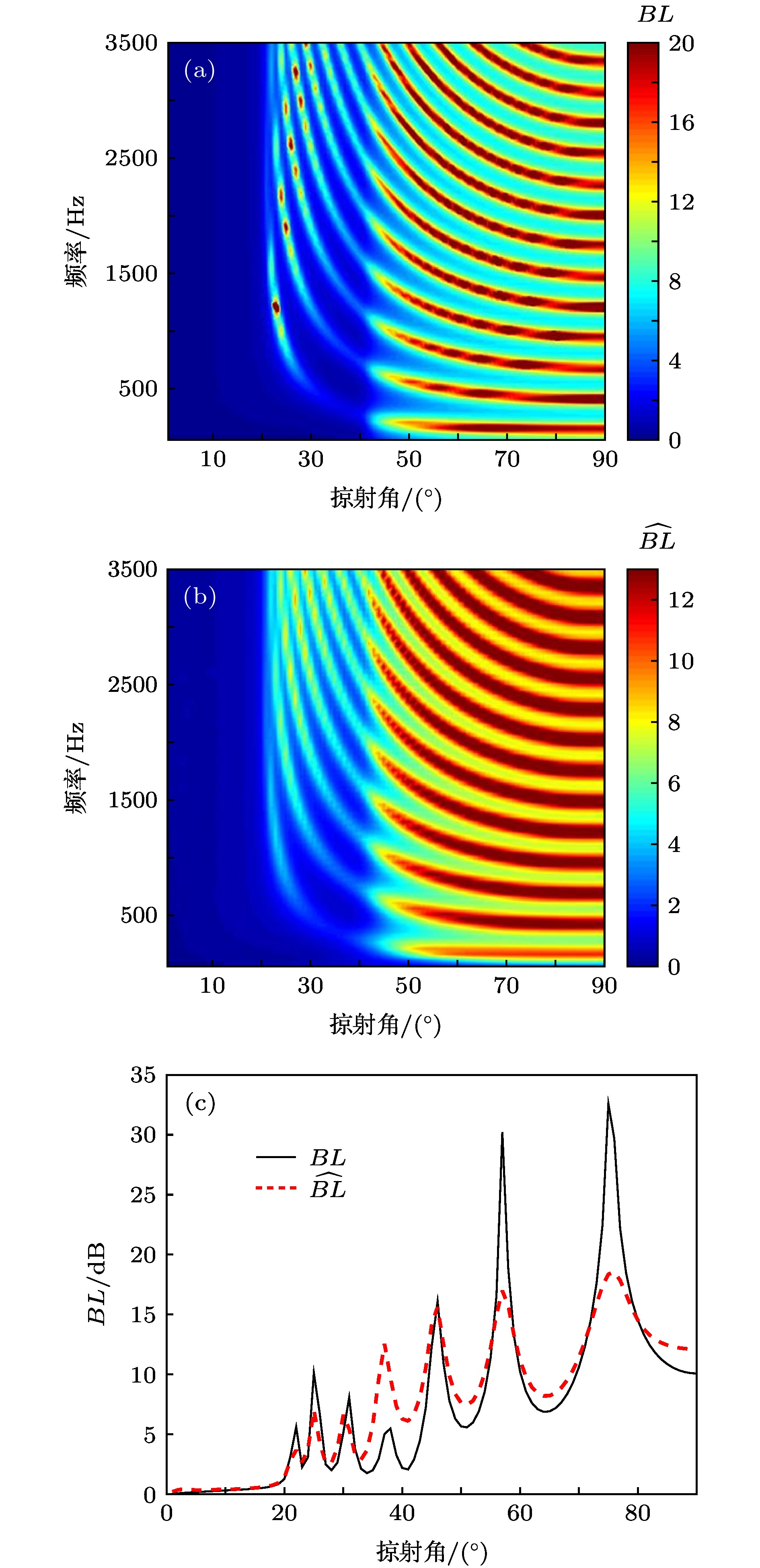
图 2 (a) 真实反射损失BL; (b) 根据噪声垂直空间指向性利用OASN模块仿真得到的
$\widehat {BL}$ ; (c) 1800 Hz下两种方法的比较, 实线为BL, 虚线为$\widehat {BL}$ Fig. 2. (a) True BL; (b)
$\widehat {BL}$ computed by vertical directionality of ocean ambient noise using OASN; (c) two methods compare under 1800 Hz, the full line is BL, the imaginary line is$\widehat {BL}$ 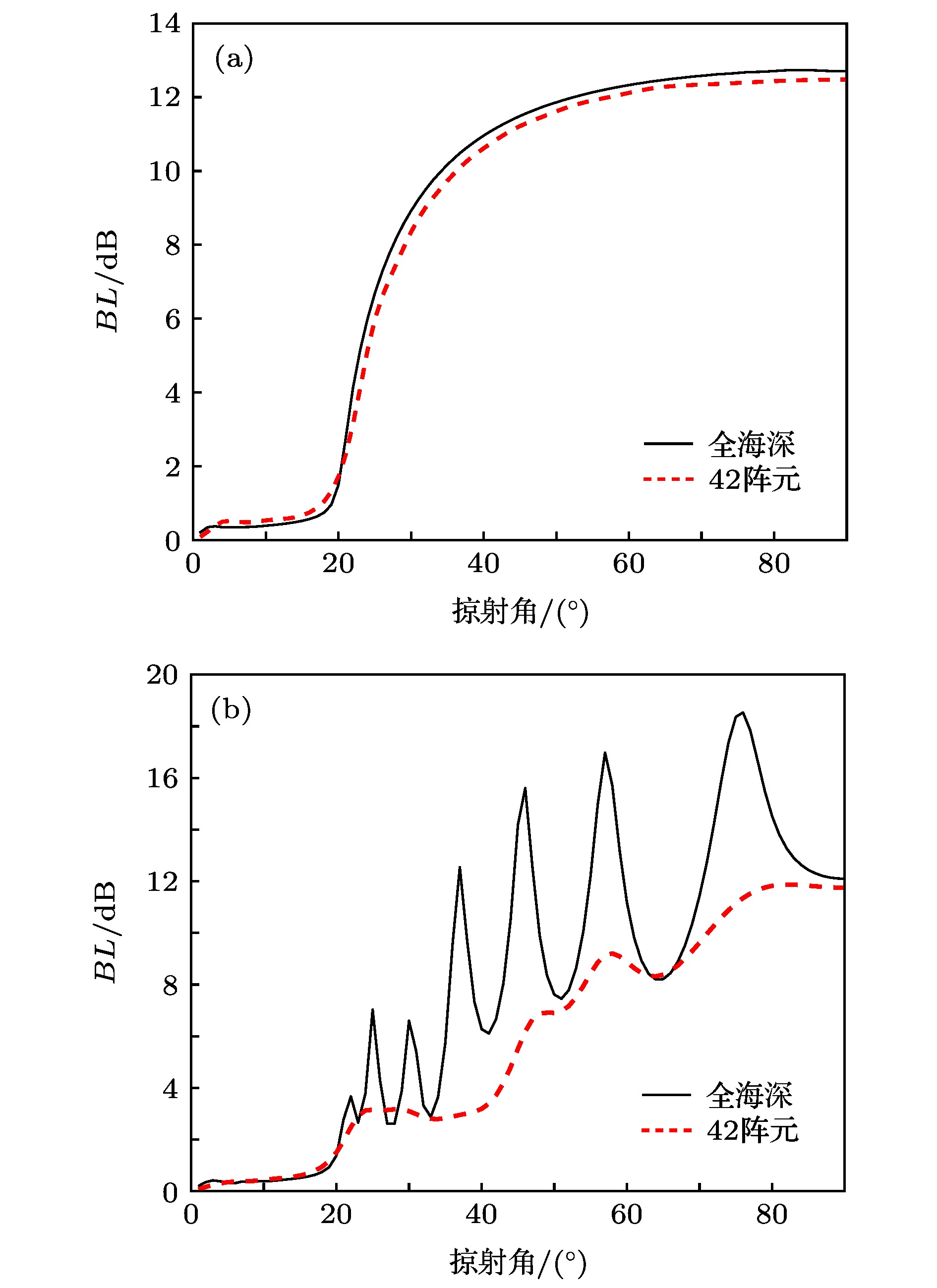
图 3 1800 Hz下不同海底分层结构下的
$\widehat {BL}$ (实线为阵元遍布全海深, 点划线为42阵元, 间隔均为0.2 m) (a) 海底为无限大液体声学半空间; (b) 海底为单层沉积层Fig. 3. The
$\widehat {BL}$ of different structure of sub-bottom under 1800 Hz: (a) Infinite acoustic half space; (b) 1 layer of sediment. The full line corresponds to the condition that the elements set across the sea. The imaginary line corresponds to the condition that 42 elements set at the depth of 30 m
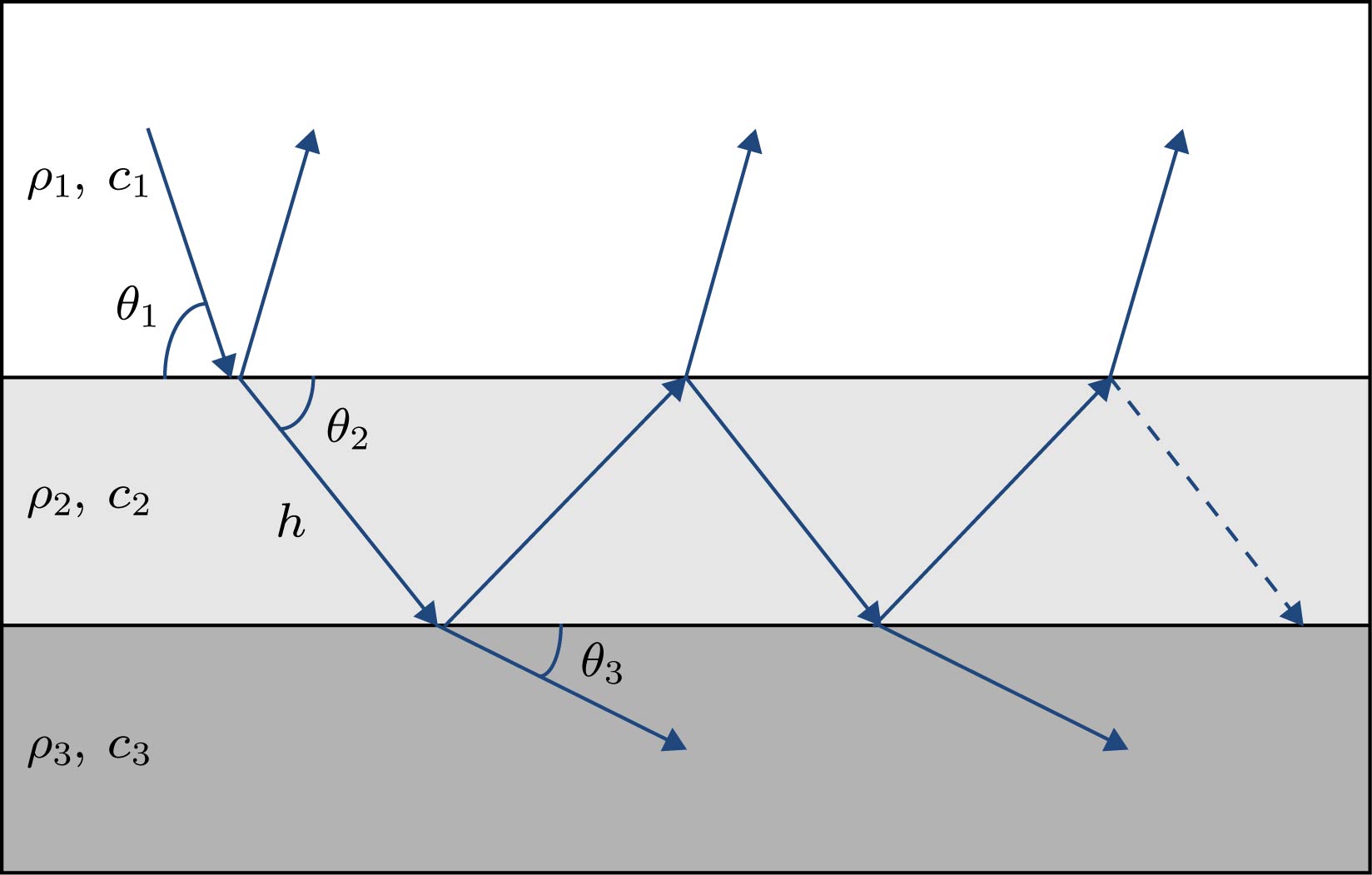
图 4 海底分层模型 (a)液体无限大声学半空间海底; (b) 存在一层沉积层海底
Fig. 4. Model of sub-bottom stratification: (a) Infinite acoustic half space; (b) 1 layer of sediment
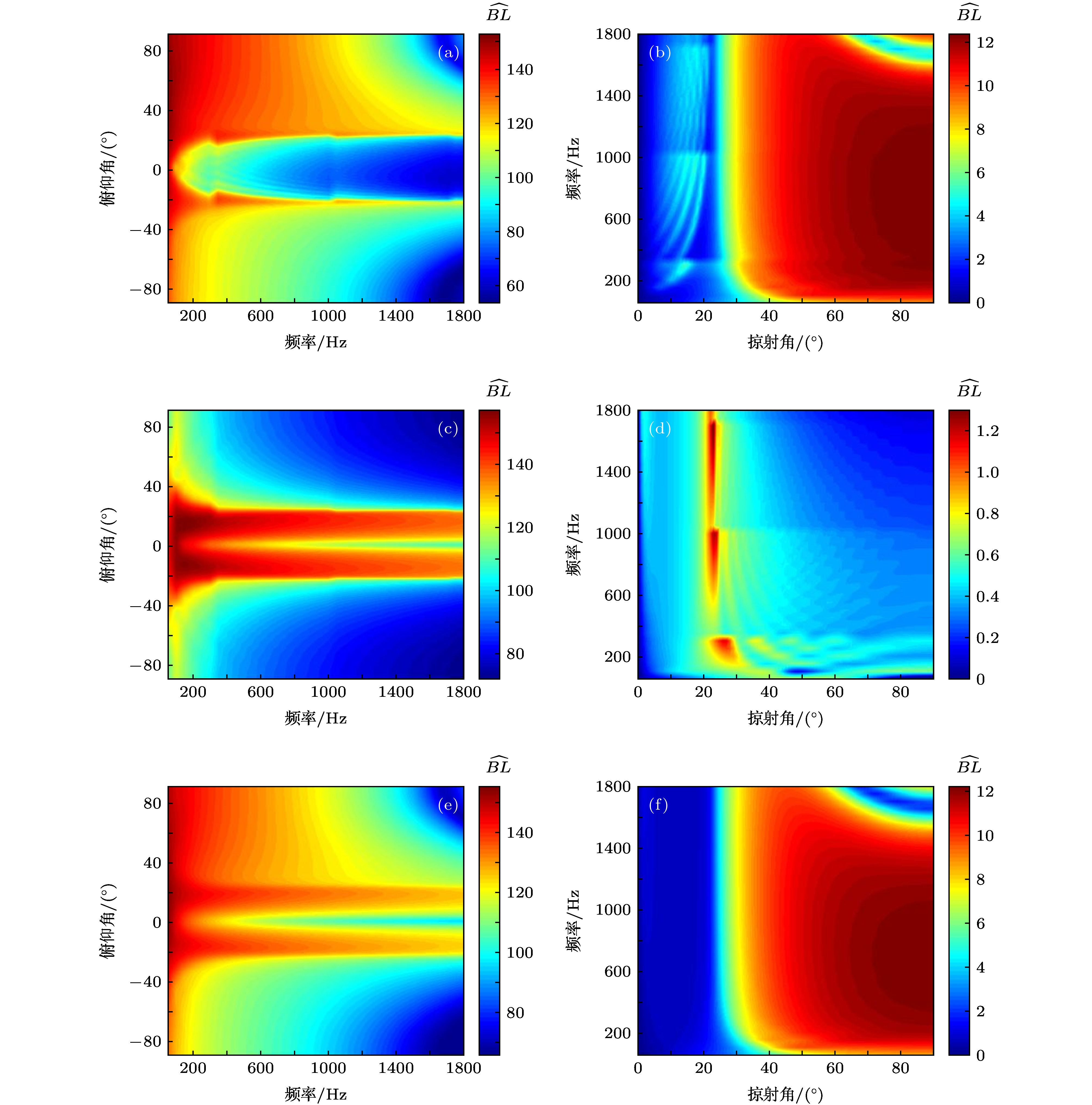
图 6 不同谱域内噪声场的指向性和
$\widehat {BL}$ (a), (b)连续谱部分噪声场; (c), (d) 离散谱部分噪声场; (e), (f)全谱域噪声场Fig. 6. Vertical directivity and
$\widehat {BL}$ of ocean ambient noise in different spectral domain: (a), (b) Near field continuous spectrum; (c), (d) far field discrete spectrum; (e), (f) full spectrum domain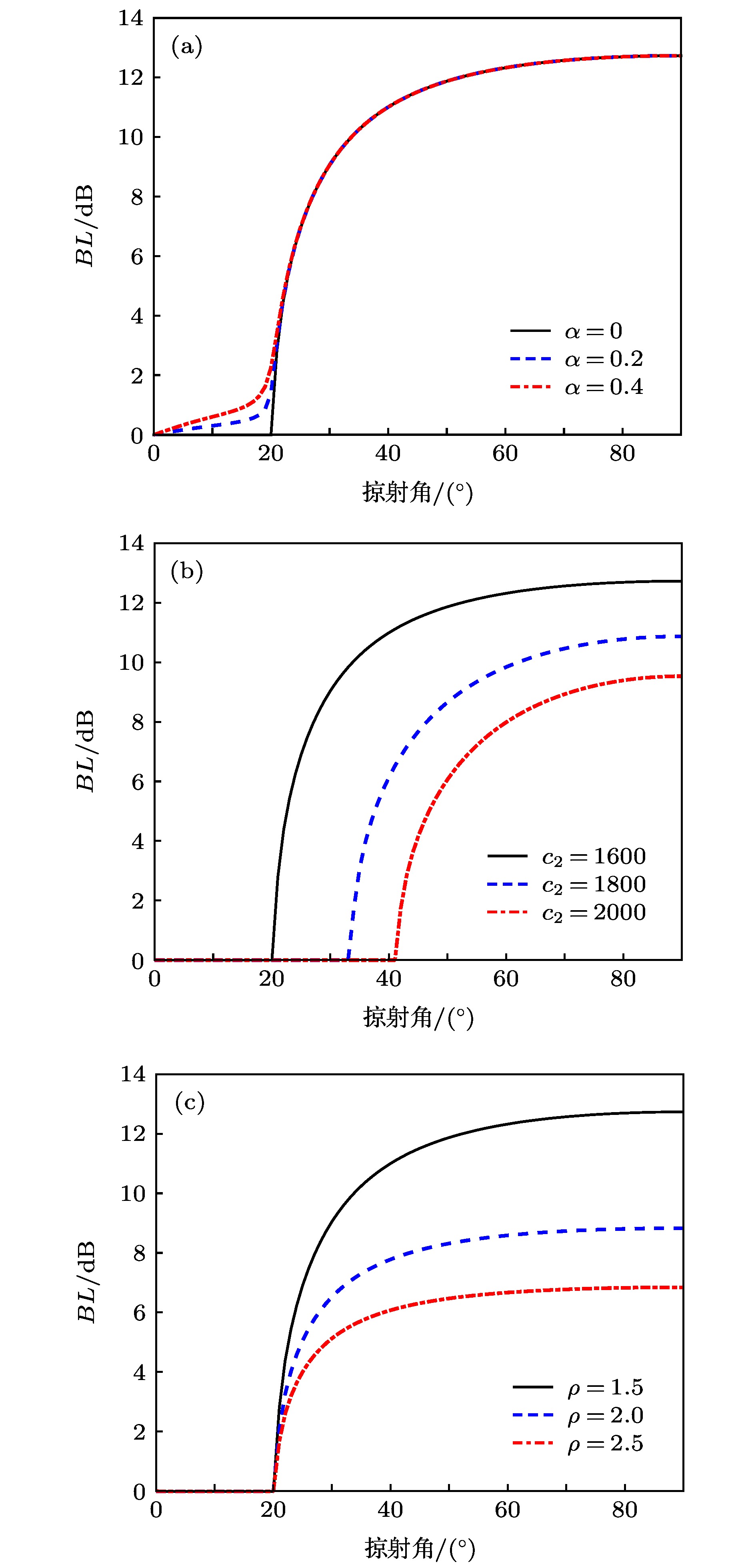
图 7 不同海底参数下的BL (a)衰减系数
$\alpha $ ; (b)声速c; (c)密度$\rho $ Fig. 7. The BL under different parameters of sub-bottom: (a) Attenuation coefficient
$\alpha $ ; (b) sound speed c; (c) density$\rho $ 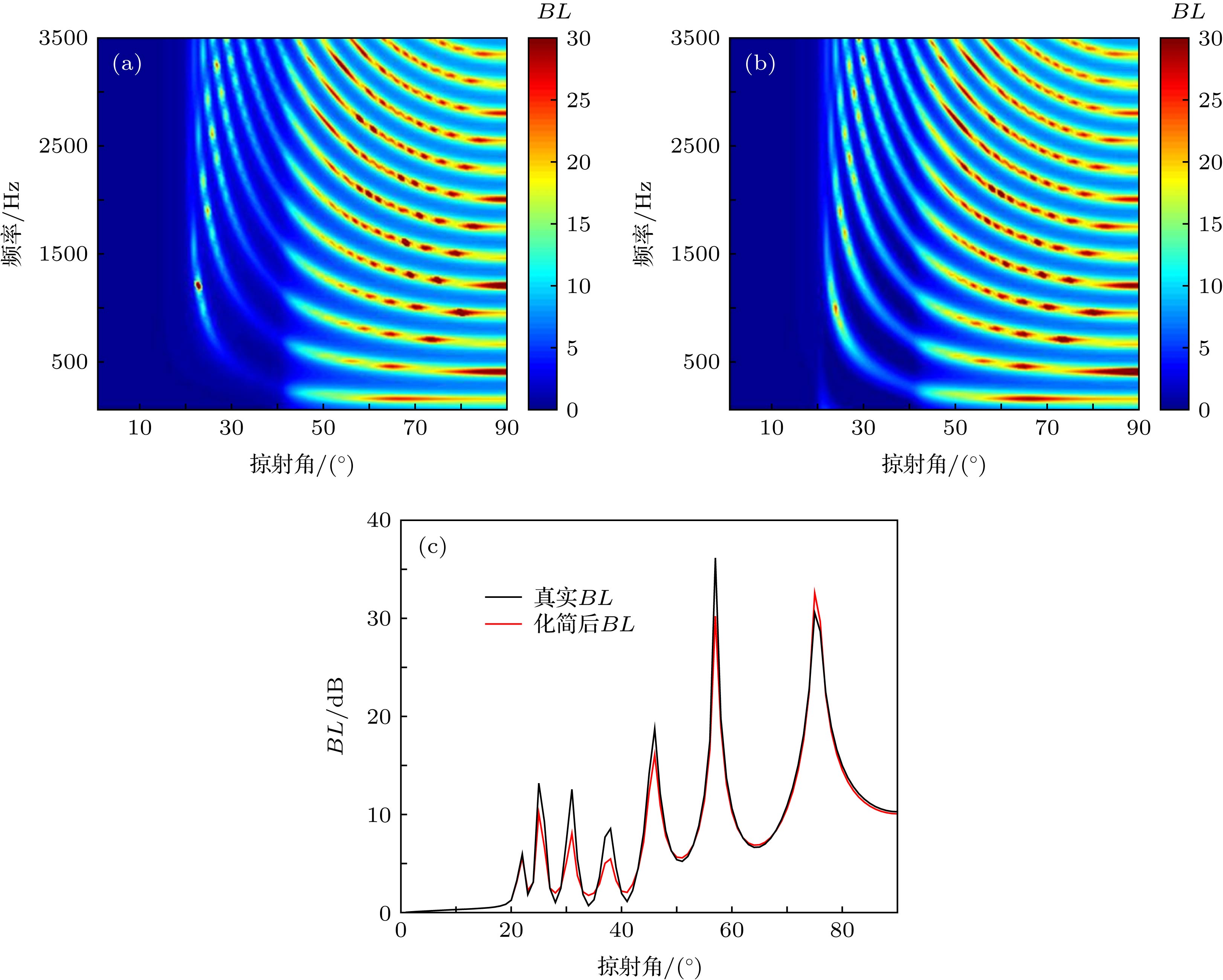
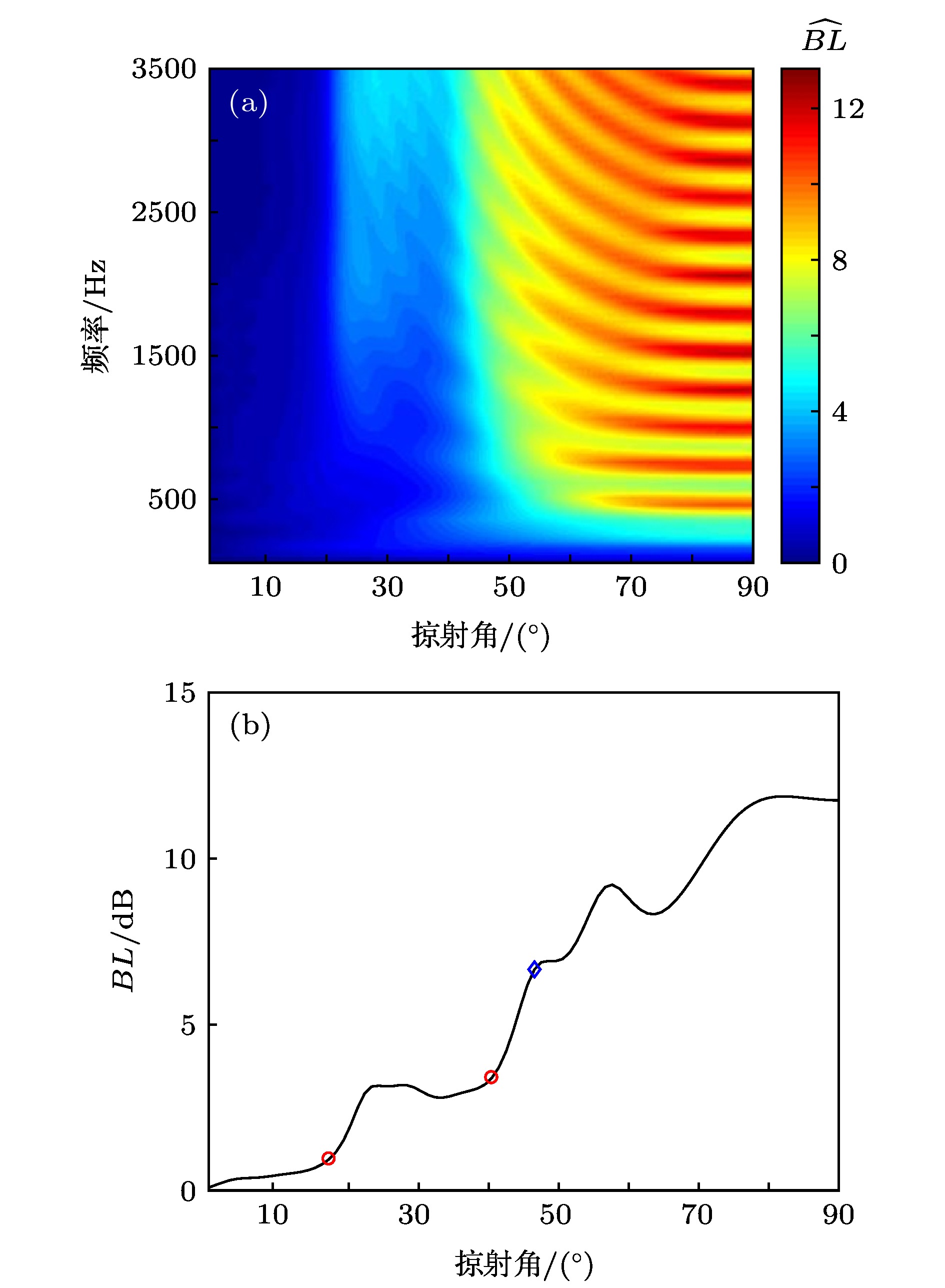
图 11 (a) 42阵元设置在水下30 m处
$\widehat {BL}$ ; (b) 1800 Hz下$\widehat {BL}$ 曲线Fig. 11. (a)
$\widehat {BL}$ with 42 elements at the depth of 30 m; (b) the curve of$\widehat {BL}$ under 1800 Hz.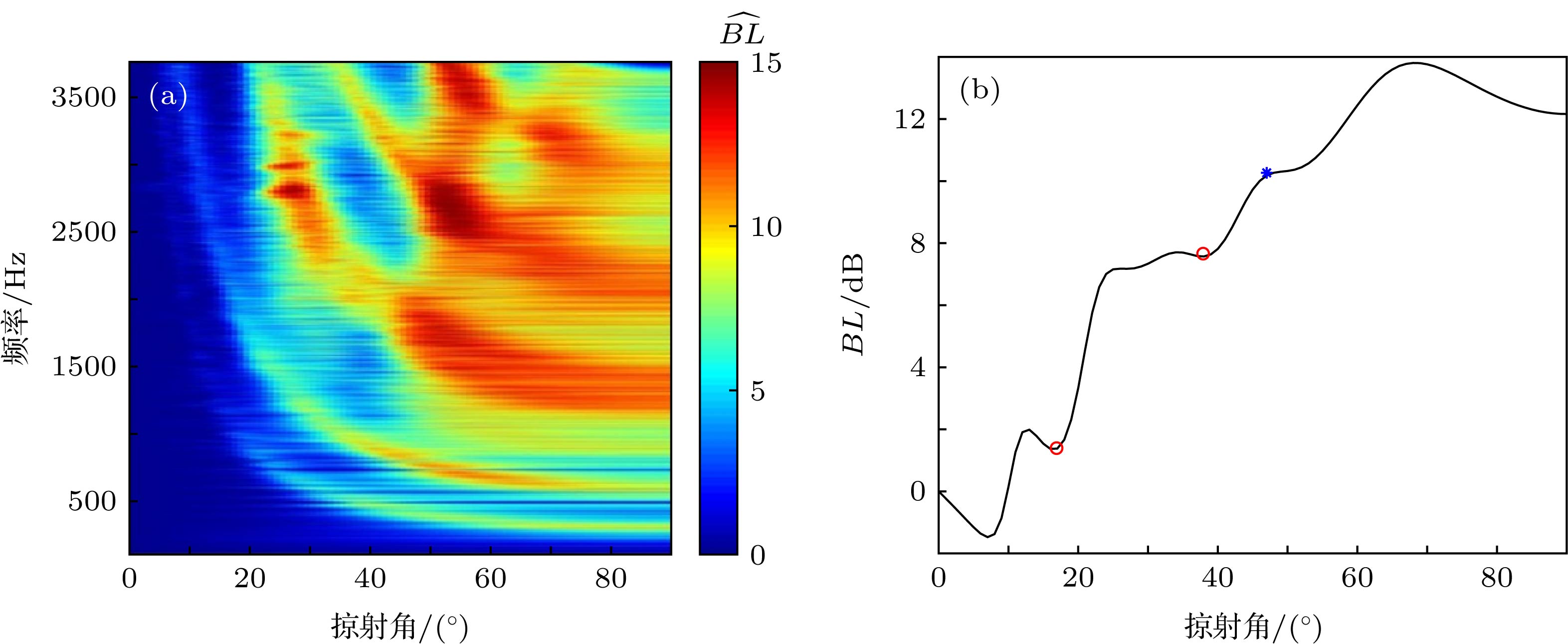
图 13 第9组数据处理结果 (a)
$\widehat {BL}$ ; (b) 1600 Hz下的$\widehat {BL}$ 曲线Fig. 13. Results of the 9th set of data: (a)
$\widehat {BL}$ ; (b) curve of$\widehat {BL}$ under 1600 Hz
图 14 第11组数据处理结果 (a)
$\widehat {BL}$ ; (b) 1600 Hz下$\widehat {BL}$ 曲线Fig. 14. Results of the 11th set of data: (a)
$\widehat {BL}$ ; (b) curve of$\widehat {BL}$ under 1600 Hz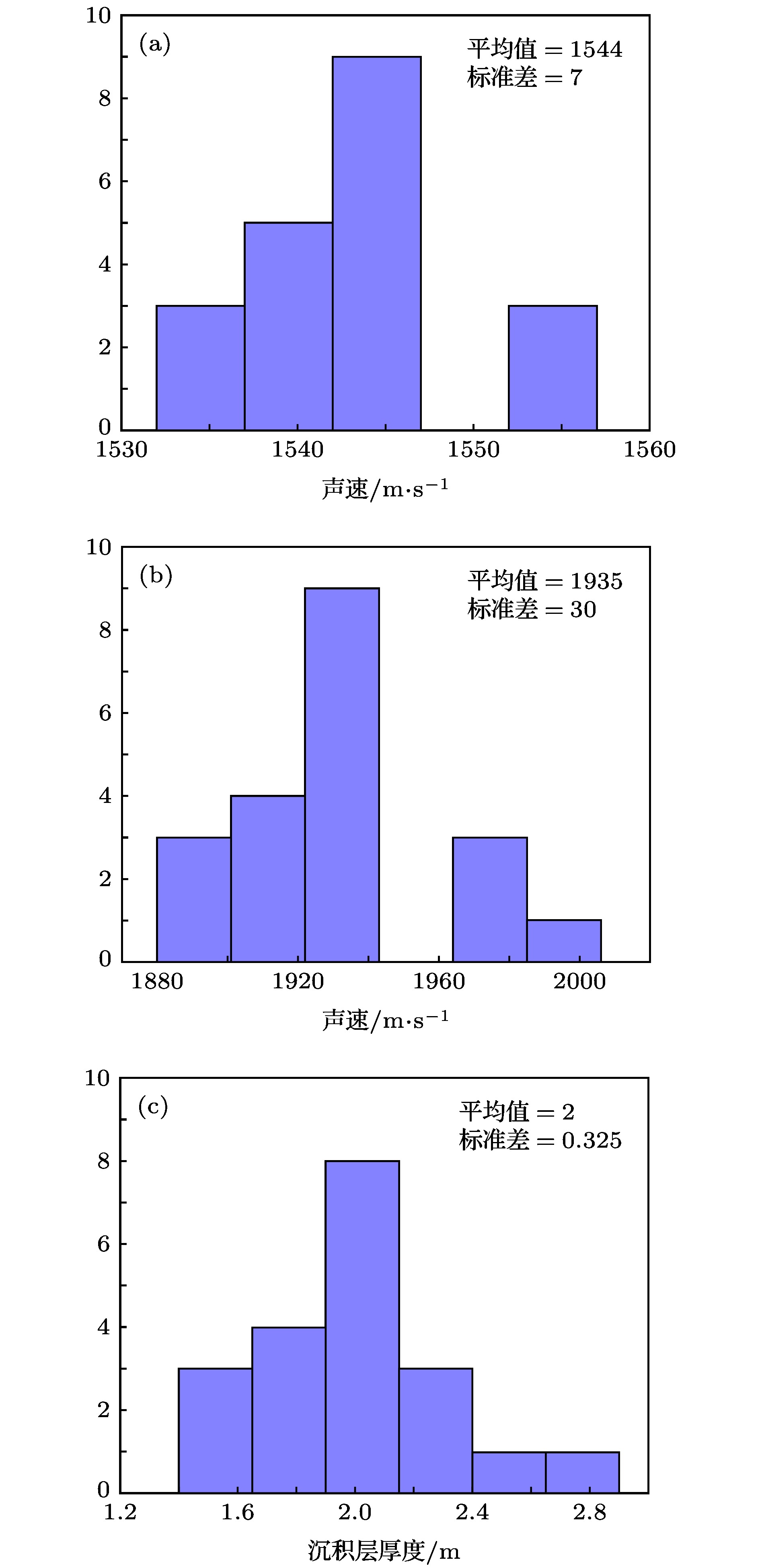
图 15 数据计算结果统计分布直方图 (a)沉积层声速; (b)基底声速; (c)沉积层厚度
Fig. 15. Statistical distribution histogram of 20 sets of data: (a) Sound speed of the sediment; (b) sound speed of the basement; (c) thickness of the sediment
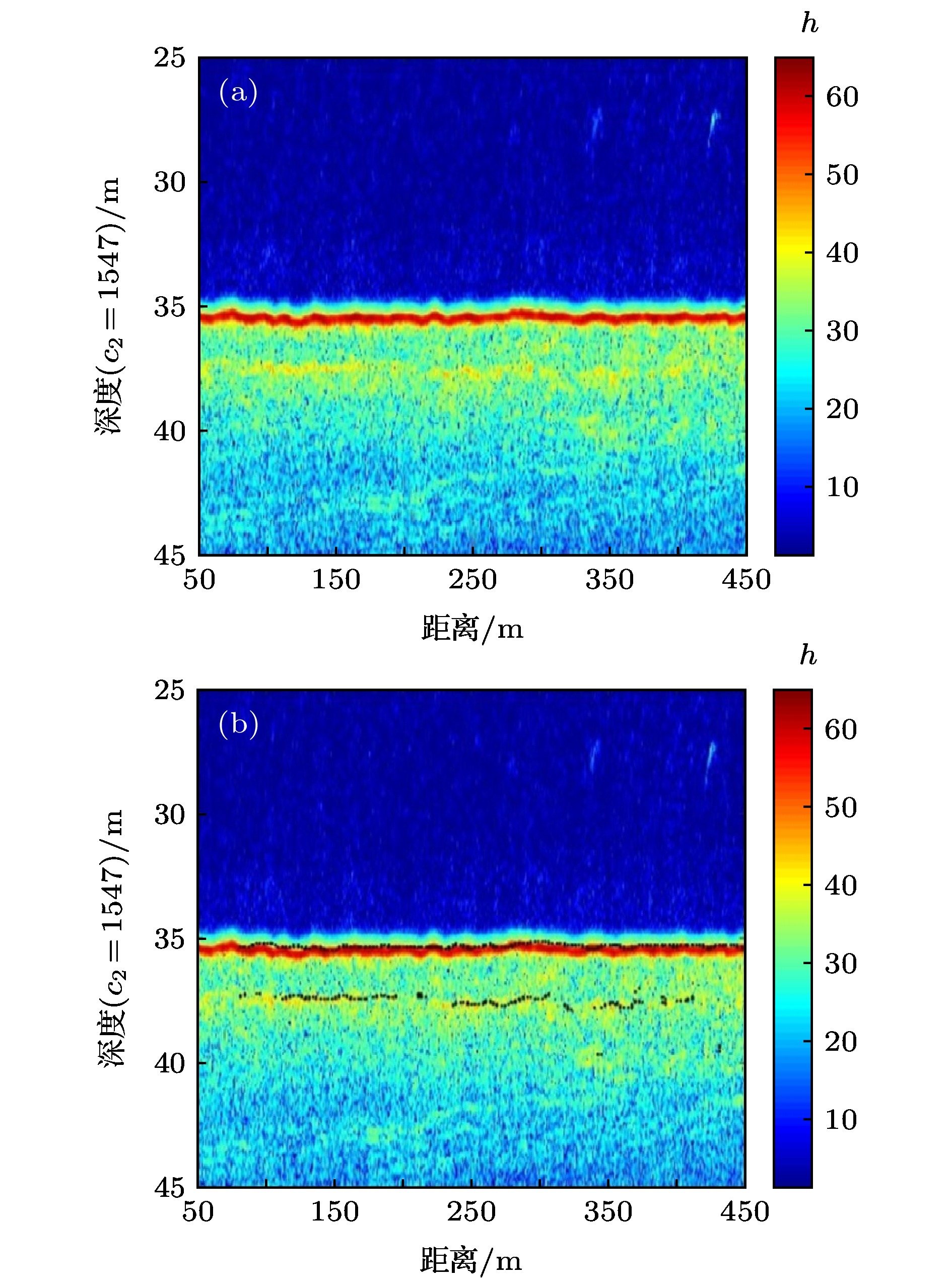
图 16 浅地层剖面仪探测试验海区海底结构(图(b)中用黑点标明海底分界面)
Fig. 16. Sub-bottom structure of the experimental area detected by sub-bottom profiler. The interface is marked by black spot in panel (b)
表 1 海水及海底声学参数
Table 1. Parameters of ocean and sub-bottom
介质
类型声速
c/m·s–1衰减系数
α/dB·λ–1对水
密度ρ深度
H/m海水 1500 0 1 40 沉积层 1600 0.2 1.5 3 基底 2000 0.6 2 ∞  下载: 导出CSV
下载: 导出CSV
-
[1] Wenz G M 1962 J. Acoust. Soc. Am. 34 1936
Google Scholar
[2] Kuperman W A, Ingenito F 1980 J. Acoust. Soc. Am. 67 1988
Google Scholar
[3] HarrisonC H 1996 J. Acoust. Soc. Am. 99 2055
Google Scholar
[4] 林建恒 2002 博士学位论文 (北京: 中国科学院研究生院)
Lin J H 2002 Ph. D. Dissertation (Beijing: Graduate University of Chinese Academy of Science) (in Chinese)
[5] 张乾初 2017 博士学位论文 (北京: 中国科学院大学)
Zhang Q C 2017 Ph. D. Dissertation (Beijing: University of Chinese Academy of Science) (in Chinese)
[6] 郭新毅, 铁广鹏, 李凡, 马力 2014 物理 43 723
Guo X Y, Tie G P, Li F, Ma L 2014 Physics 43 723
[7] 江鹏飞, 林建恒, 孙军平, 衣雪娟 2017 物理学报 66 014306
Google Scholar
Jiang P F, Lin J H, Sun J P, Yi X J 2017 Acta Phys. Sin. 66 014306
Google Scholar
[8] 蒋光禹, 孙超, 谢磊, 刘雄厚 2019 物理学报 68 024302
Google Scholar
Jiang G Y, Sun C, Xie L, Liu X H 2019 Acta Phys. Sin. 68 024302
Google Scholar
[9] Zeng J, Chapman N R, Bonnel J 2013 J. Acoust. Soc. Am. 134 EL394
Google Scholar
[10] 李梦竹, 李整林, 周纪浔, 张仁和 2019 物理学报 68 094301
Google Scholar
Li M Z, Li Z L, Zhou J X, Zhang R H 2019 Acta Phys. Sin. 68 094301
Google Scholar
[11] 周建波, 朴胜春, 刘亚琴, 张海刚, 屈科, 李晓曼, 张明辉 2019 声学学报 44 337
Zhou J B, Piao S C, Liu Y Q, Zhang H G, Qu K, Li X M, Zhang M H 2019 Acta Acoust. 44 337
[12] 江鹏飞, 林建恒, 马力, 殷宝友, 蒋国建 2016 声学学报 41 59
Jiang P F, Lin J H, Ma Li, Yin B Y, Jiang G J 2016 Acta Acoust. 41 59
[13] 骆文于 2002 博士学位论文 (北京: 中国科学院声学研究所)
Luo W Y 2002 Ph. D. Dissertation (Beijing: Institute of Acoustics, Chinese Academy of Science) (in Chinese) (in Chinese)
[14] 布列霍夫斯基Л М 著 (山东省海洋学院海洋物理系, 中国科学院声学研究所水声研究室 译) 1983 海洋声学 (北京: 科学出版社) 第516−520页
Бреховских Л М (translated by Department of Oceanophysics Shandong College of Oceanology, Laboratory of Underwater Acoustic Institute of Acoustics Chinese Academy of Science) 1983 Fundamentals of Ocean Acoustics (Beijing: Science Press) pp516−520 (in Chinese)
[15] Harrison C H, Simons D G 2002 J. Acoust. Soc. Am. 112 1377
Google Scholar
[16] Harrison C H 2004 J. Acoust. Soc. Am. 115 1505
Google Scholar
[17] Siderius M, Harrison C H, Porter M B 2006 J. Acoust. Soc. Am. 120 1315
Google Scholar
[18] Muzi L, Siderius M, Quijano J E, Dosso S E 2015 J. Acoust. Soc. Am. 137 481
[19] Muzi L, Siderius M, Nielsen P L 2016 J. Acoust. Soc. Am. 140 1513
[20] Schmidt H 2004 OASES version 3.1 User Guide and Reference Manual (Cambridge, MA: Massachusetts Institute of Technology)
[21] Jensen F B, KupermanW A, Porter M B, Schmidt H 2011 Computational Ocean Acoustics (2nd Ed.) (New York: Springer) pp38−43
[22] Zeng J, Zhao Z D, Peng D Y, Ma L, Shang E C 2019 J. Acoust. Soc. Am. 145 EL243
Google Scholar

 下载:
下载:


























计量
- 文章访问数: 14948
- PDF下载量: 154
- 被引次数: 0
