










-
有限投影条件下激光吸收光谱二维测量光路优化对燃烧场重建结果具有重要影响. 针对基于Tikhonov正则化的病态投影方程组求解问题, 提出了基于正则化参数矩阵的光路设计与二维重建方法. 建立了基于Tikhonov正则化参数矩阵的光路设计目标函数, 利用遗传算法获得最佳光路布置方式, 通过匹配光路与正则化参数分布对测量区域内正则化权重进行调整以减小重建误差. 采用7185.6 cm–1波段H2O特征谱线并结合20条投影光路对10 × 10离散化测量区域内双峰高斯分布模型进行了重建, 对5种光路布置方式重建结果进行了对比分析, 结果表明基于Tikhonov正则化参数矩阵的光路布置方式重建结果最佳. 光路数量越少, Tikhonov正则化参数矩阵作用效果越明显. 开展了针对气液两相脉冲爆轰发动机外流场的模拟测量研究, 验证了本文光路布置方式在复杂多变流场环境下重建效果. 在实验室内针对小型燃气炉进行了实验测试, 重建燃烧场峰值位置和幅值与实际情况吻合. 研究结果对于推动激光吸收光谱二维重建技术在发动机诊断及燃烧效率提升方面的应用具有重要意义.
-
关键词:
- 激光吸收光谱 /
- 二维重建 /
- Tikhonov正则化 /
- 奇异值分解
Beam arrangement with limited projections is a critical part of research on tunable diode laser absorption tomography reconstruction for combustion diagnosis. Based on the efforts to regularize this rank-deficient and ill-posed problem with Tikhonov regularization, a novel approach to using the regularization parameter matrix is developed for designing optical component layout and predicting the reconstruction accuracy. Objective function of beam arrangement is established by the rigorous mathematical derivation, and genetic algorithm is adopted to realize the optimization of function to overcome the difficulty associated with the multimodal nature of the problem. Nonuniform distribution properties of matrix elements in physical space relate to location and alignment of the laser/detector pairs, and form a basis for adjusting the weight between measurement and regularization to improve the reconstruction performance. A mathematical model of double Gauss distributions is established in a 10 × 10 element discrete tomography domain, and typically 20 measurement beams scanning the H2O transition at 7185.6 cm–1 are available to probe the domain of interest. The systematic comparison between optimized beam array here and four existing beam arrangements in the literature is analyzed to validate the method. The reconstruction with Tikhonov regularization parameter matrix shows obvious advantages of reducing errors especially under the condition of fewer projections. The validation of reconstruction performance of the optimized beam array is also examined by simulating the laser absorption measurement which is carried out on phantoms generated using a simulation of external flow field of an air-gasoline pulsed detonation engine. The result shows that the optimized beam array consistently outperforms other arrangements reported in complicated fluid field. A demonstration reconstruction experiment is performed on the distribution from small gas burners. Both locations and amplitudes are in good agreement with those in the actual case. This proposed design method will be valuable in broadening the scope of applications of tunable diode laser absorption tomography reconstruction for engine diagnosis and combustion efficiency improvement.-
Keywords:
- laser absorption spectroscopy /
- tomography reconstruction /
- Tikhonov regularization /
- singular value decomposition
[1] Jatana G, Geckler S, Koeberlein D, Partridge W 2017 Sens. Actuators B-Chem. 240 1197
 Google Scholar
Google Scholar
[2] Kamimoto T, Deguchi Y, Shisawa Y, Kitauchi Y, Eto Y 2016 Appl. Therm. Eng. 102 596
Google Scholar
[3] Wood M P, Ozanyan K B 2015 IEEE Sens. J. 15 545
Google Scholar
[4] Goldenstein C S, Spearrin R M, Jeffries J B, Hanson R K 2014 Appl. Phys. B 116 705
Google Scholar
[5] Strand C L, Hanson R K 2015 AIAA 53 2978
Google Scholar
[6] Tsekenis S A, Wilson D, Lengden M, Hyvonen J, Leinonen J, Shah A, Andersson O, McCann H 2017 Flow Meas. Instrum. 53 116
Google Scholar
[7] Tsekenis S A, Polydorides, N 2017 IEEE Sens. J. 17 8072
Google Scholar
[8] Xu L J, Liu C, Jing W Y, Cao Z, Xue X, Lin Y Z 2016 Rev. Sci. Instrum. 87 013101
Google Scholar
[9] Cai W W, Kaminski C F 2017 Prog. Energy Combust.Sci. 59 1
Google Scholar
[10] Liu C, Xu L J, Chen J L, Cao Z, Lin Y Z, Cai WW 2015 Opt. Express 23 22494
Google Scholar
[11] Wang F, Wu Q, Huang Q X, Zhang H D, Yan J H, Cen K F 2015 Opt. Commun. 346 53
Google Scholar
[12] Xia H H, Kan R F, Xu Z Y, He Y B, Liu J G, Chen B, Yang C G, Yao L, Wei M, Zhang G L 2017 Opt. Laser Eng. 90 10
Google Scholar
[13] Cai W W, Ewing D J, Ma L 2008 Comput. Phys. Commun. 179 250
Google Scholar
[14] Cai W W, Ewing D J, Ma L 2011 Appl.Math. Comput. 217 5754
Google Scholar
[15] Terzija N, Davidson J L, Garciastewart C A, Wright P, Ozanyan K B, Pegrum S, Litt T J, Mccann H 2009 Meas. Sci.Technol. 19 094007
Google Scholar
[16] Song J L, Hong Y J, Pan H, Wang G Y 2013 Proceedings of 5th International Symposium on Photoelectronic Detection and Imaging Beijing, China, June 25–27, 2013 p89070K
[17] Twynstra M G, Daun K J 2012 Appl. Opt. 51 7059
Google Scholar
[18] Grauer S J, Hadwin P J, Daun K J 2016 Appl. Opt. 55 5772
Google Scholar
[19] Yu T, Tian B, Cai W W 2017 Opt. Express 25 5982
Google Scholar
[20] Kang Y, Li N, Weng C S, Wang C W 2018 Chin. Phys. B 27 104703
Google Scholar
-
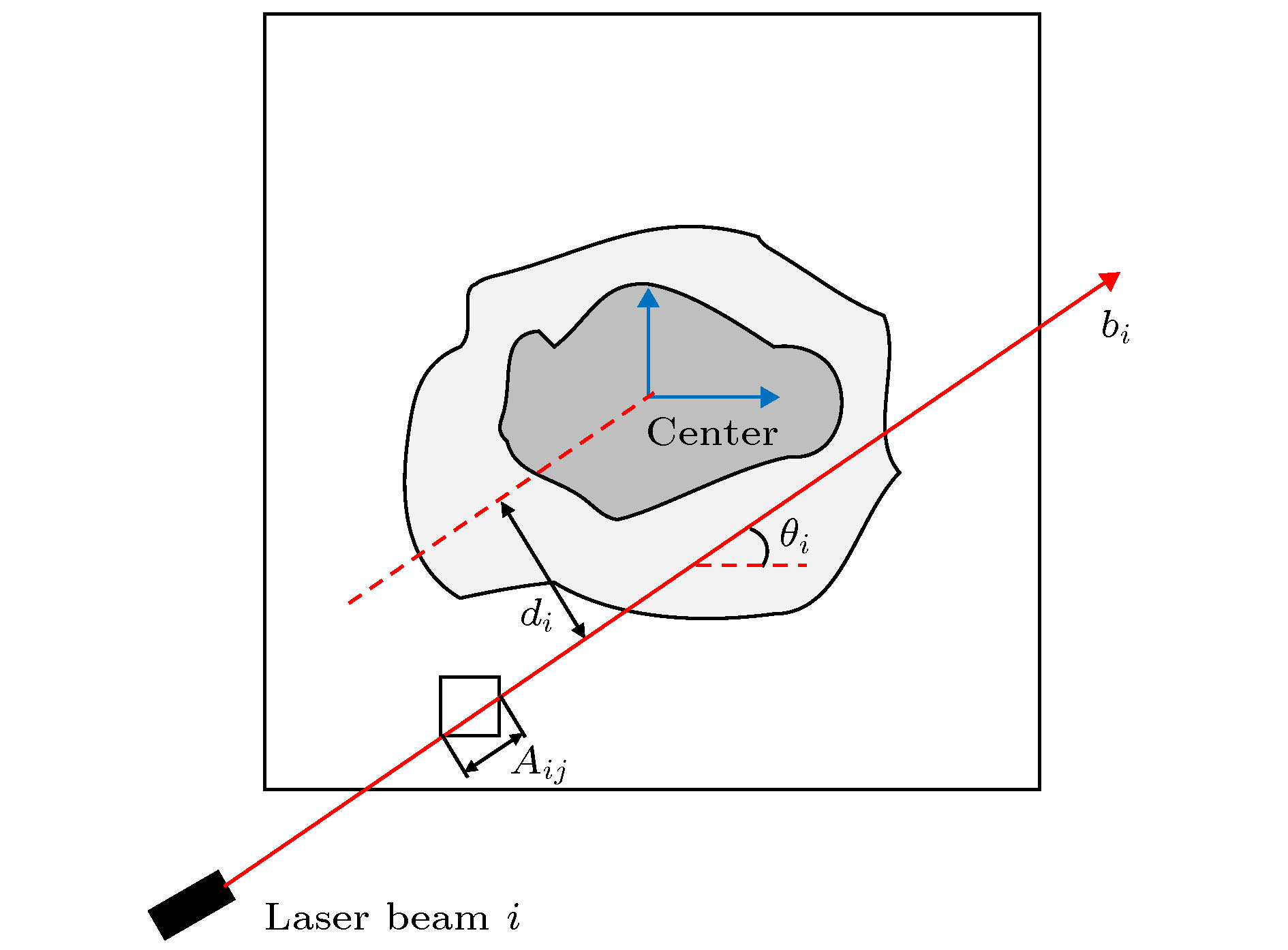
图 1 激光吸收光谱二维测量光路系统示意图
Fig. 1. Geometry of transmitted laser beam in tomography measurement.
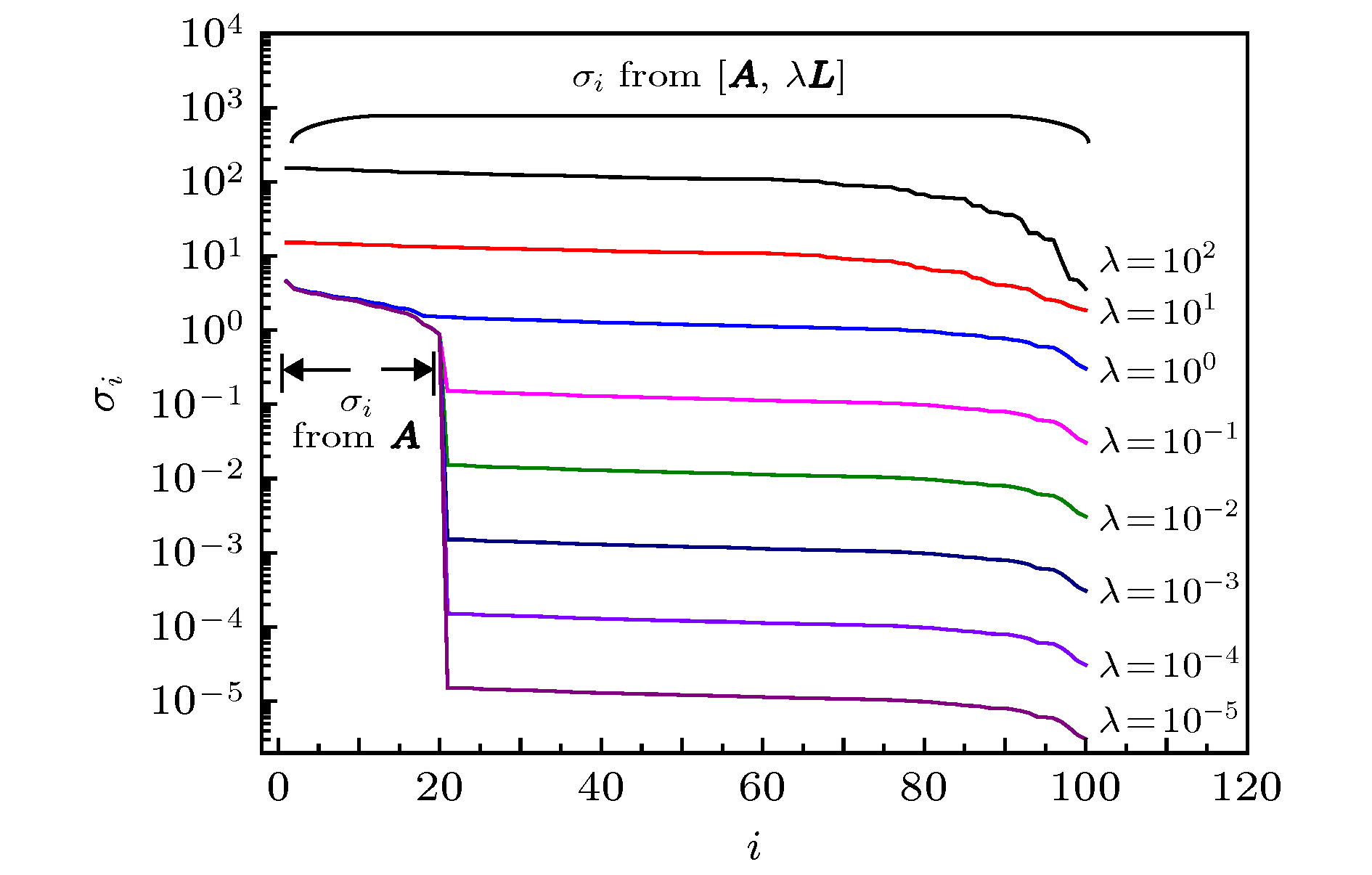
图 2 不同正则化参数
$\lambda $ 影响下增广矩阵$\left[ {{{A}}; \lambda {{L}}} \right]$ 奇异值变化曲线Fig. 2. Singular values of the augmented matrix
$\left[ {{{A}}; \lambda {{L}}} \right]$ with various λ.
图 4 光路布置方式与相应的正则化参数矩阵 (a) 扇形光路布置; (b) 正则化参数矩阵元素分布图像
Fig. 4. Beam configuration and corresponding regularization parameter matrix: (a) Fanned beam configuration; (b) distribution of matrix elements in the physical space.
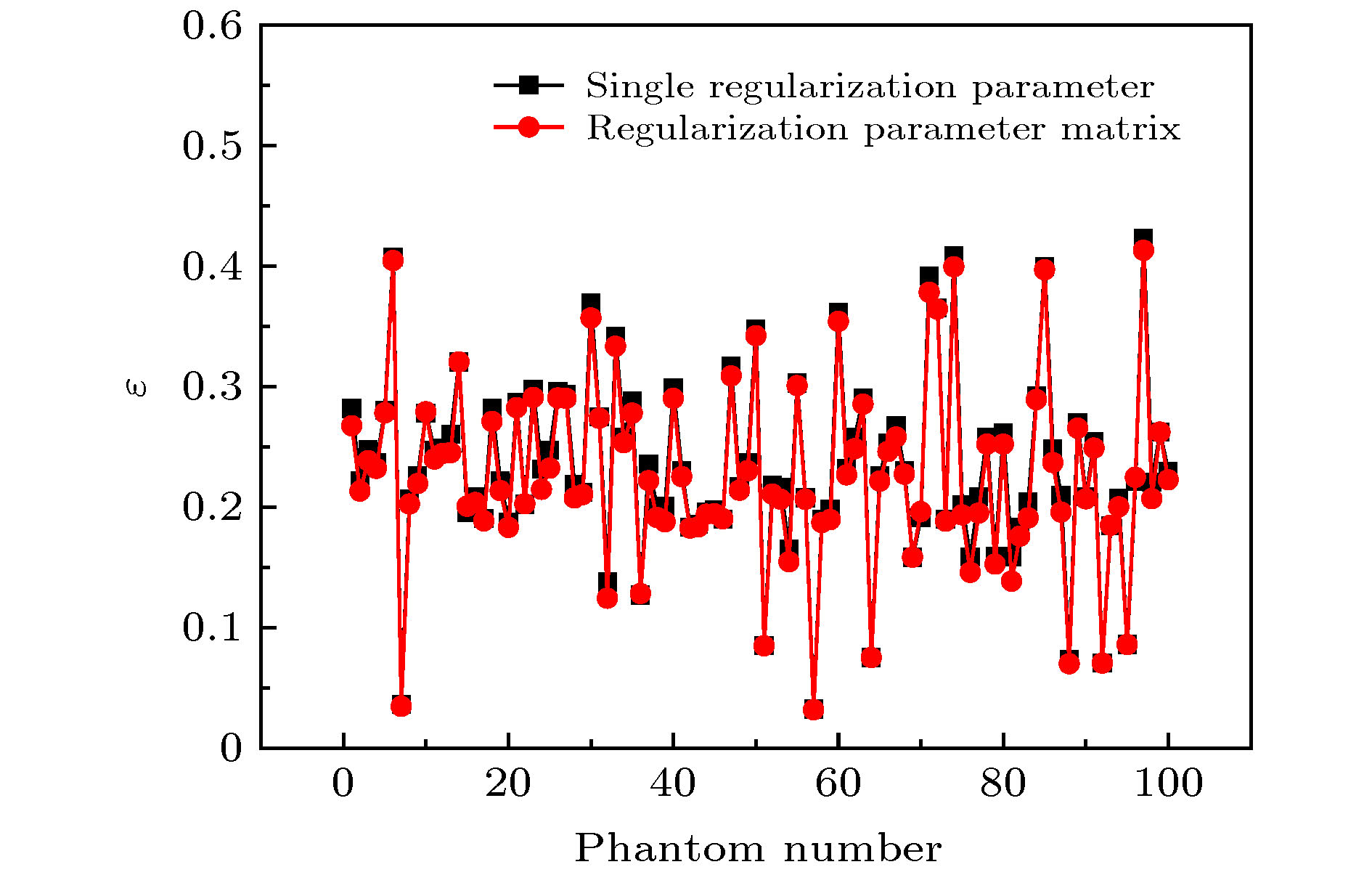
图 5 4 × 4扇形光路布置方式下分别利用单一正则化参数与正则化参数矩阵方法对100个高斯分布模型重建结果对比
Fig. 5. Comparison of reconstruction errors for 4 × 4 fanned beam arrangement and 100 Gauss phantoms calculated by single regularization parameter and regularization parameter matrix.

图 6 5种光路布置方式空间分布图与对应投影域图 (a) 2 × 10平行光路布置方式; (b) 4 × 5扇形光路布置方式; (c) 基于Mod设计的光路布置方式; (d) 基于单一正则化参数设计的光路布置方式; (e) 基于正则化参数矩阵设计的光路布置方式
Fig. 6. Five example beam configuration in the physical space and in Radon space: (a) 2 × 10 parallel beams arrangement; (b) 4 × 5 fanned beams arrangement; (c) beams arrangement designed based on MOD method; (d) beams arrangement designed based on single regularization parameter; (e) beams arrangement designed based on regularization parameter matrix.
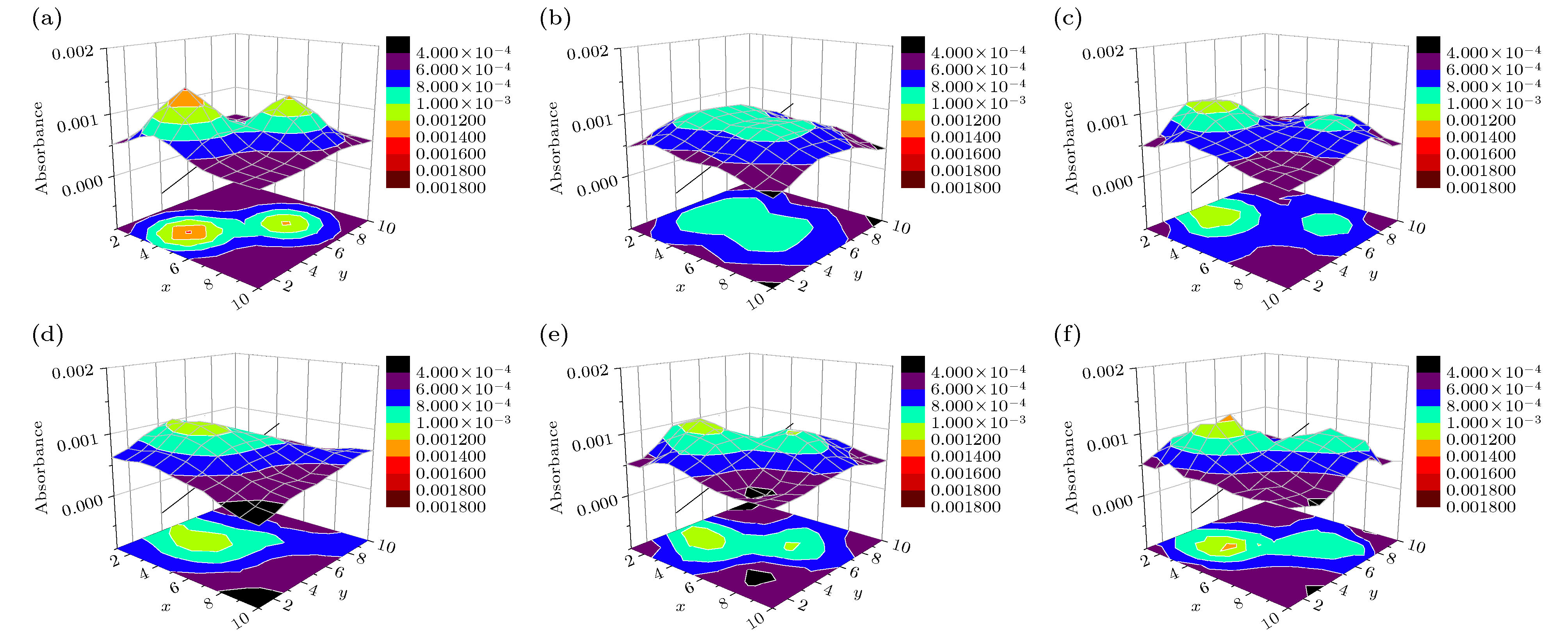
图 7 二维重建模型与不同光路布置方式重建结果 (a) 重建模型; (b) 2 × 10平行光路布置方式; (c) 4 × 5扇形光路布置方式; (d) 基于Mod设计的光路布置方式; (e) 基于单一正则化参数设计的光路布置方式; (f) 基于正则化参数矩阵设计的光路布置方式
Fig. 7. Phantom and reconstruction results from different beam arrangement: (a) Phantom; (b) 2 × 10 parallel beams arrangement; (c) 4 × 5 fanned beams arrangement; (d) beams arrangement designed based on MOD method; (e) beams arrangement designed based on single regularization parameter; (f) beams arrangement designed based on regularization parameter matrix.

图 9 气液两相爆轰外流场重建模型
Fig. 9. Model of simulated tomography measurement in a two-phase detonation flow.
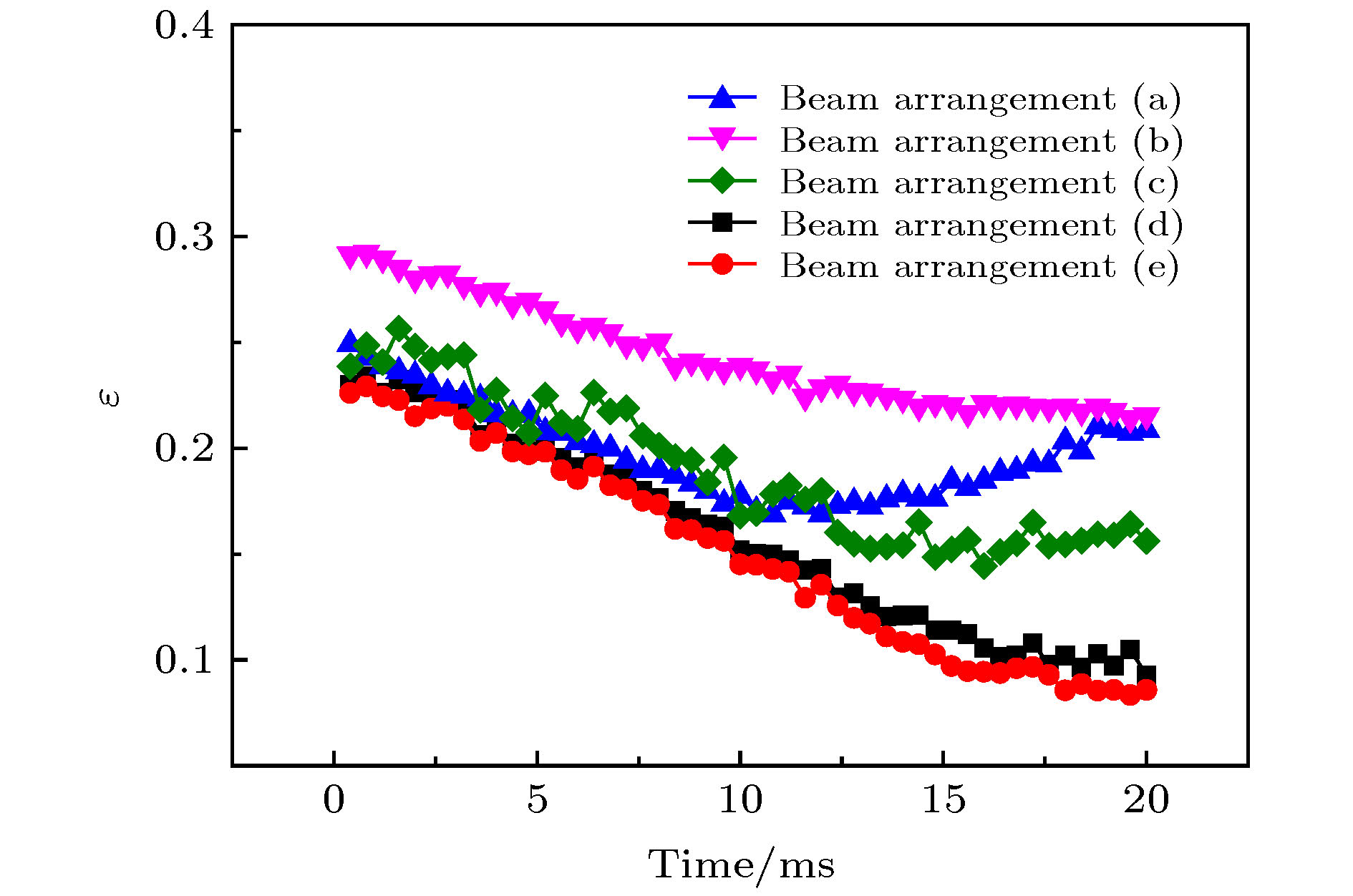

图 11 激光吸收光谱二维重建实验示意图
Fig. 11. Experiment on tomography reconstruction based on tunable diode laser absorption.
-
[1] Jatana G, Geckler S, Koeberlein D, Partridge W 2017 Sens. Actuators B-Chem. 240 1197
Google Scholar
[2] Kamimoto T, Deguchi Y, Shisawa Y, Kitauchi Y, Eto Y 2016 Appl. Therm. Eng. 102 596
Google Scholar
[3] Wood M P, Ozanyan K B 2015 IEEE Sens. J. 15 545
Google Scholar
[4] Goldenstein C S, Spearrin R M, Jeffries J B, Hanson R K 2014 Appl. Phys. B 116 705
Google Scholar
[5] Strand C L, Hanson R K 2015 AIAA 53 2978
Google Scholar
[6] Tsekenis S A, Wilson D, Lengden M, Hyvonen J, Leinonen J, Shah A, Andersson O, McCann H 2017 Flow Meas. Instrum. 53 116
Google Scholar
[7] Tsekenis S A, Polydorides, N 2017 IEEE Sens. J. 17 8072
Google Scholar
[8] Xu L J, Liu C, Jing W Y, Cao Z, Xue X, Lin Y Z 2016 Rev. Sci. Instrum. 87 013101
Google Scholar
[9] Cai W W, Kaminski C F 2017 Prog. Energy Combust.Sci. 59 1
Google Scholar
[10] Liu C, Xu L J, Chen J L, Cao Z, Lin Y Z, Cai WW 2015 Opt. Express 23 22494
Google Scholar
[11] Wang F, Wu Q, Huang Q X, Zhang H D, Yan J H, Cen K F 2015 Opt. Commun. 346 53
Google Scholar
[12] Xia H H, Kan R F, Xu Z Y, He Y B, Liu J G, Chen B, Yang C G, Yao L, Wei M, Zhang G L 2017 Opt. Laser Eng. 90 10
Google Scholar
[13] Cai W W, Ewing D J, Ma L 2008 Comput. Phys. Commun. 179 250
Google Scholar
[14] Cai W W, Ewing D J, Ma L 2011 Appl.Math. Comput. 217 5754
Google Scholar
[15] Terzija N, Davidson J L, Garciastewart C A, Wright P, Ozanyan K B, Pegrum S, Litt T J, Mccann H 2009 Meas. Sci.Technol. 19 094007
Google Scholar
[16] Song J L, Hong Y J, Pan H, Wang G Y 2013 Proceedings of 5th International Symposium on Photoelectronic Detection and Imaging Beijing, China, June 25–27, 2013 p89070K
[17] Twynstra M G, Daun K J 2012 Appl. Opt. 51 7059
Google Scholar
[18] Grauer S J, Hadwin P J, Daun K J 2016 Appl. Opt. 55 5772
Google Scholar
[19] Yu T, Tian B, Cai W W 2017 Opt. Express 25 5982
Google Scholar
[20] Kang Y, Li N, Weng C S, Wang C W 2018 Chin. Phys. B 27 104703
Google Scholar

 下载:
下载:




计量
- 文章访问数: 8797
- PDF下载量: 80
- 被引次数: 0
