










-
菲涅尔非相干相关全息术(Fresnel incoherent correlation holography, FINCH)通过空间光调制器(spatial light modulator, SLM)将来自物点的光波分解为曲率半径不同的两束自相干光, 干涉条纹由CCD记录. 由于受限于SLM与CCD的像素数目及像素尺寸, FINCH技术与光学全息术相比记录视场要小得多. 本文通过对FINCH系统的记录过程进行理论分析, 给出了SLM所能记录的视场角, 说明通过调控加载在SLM上的双透镜光轴中心, 能够扩大SLM的有效直径从而将SLM的有效记录范围增大2.77倍, 有效扩大了系统的记录视场. 搭建了非相干光反射式数字全息记录系统并对理论分析进行了实验验证, 结果表明: 在SLM上依次加载不同光轴中心位置的双透镜掩模进行FINCH记录及再现, 将得到的各子图像拼接融合可以得到高分辨率大视场图像, 为菲涅尔非相干全息术在高分辨大视场显微成像的进一步应用提供了有力支撑.Incoherent digital holography (IDH) is a recently proposed technique to record three-dimensional (3D) information about the object under incoherent illumination, which breaks the limitation that the holographic recording must be illuminated by coherent light sources and thus makes it usable in white-light and fluorescence illuminating circumstance. In particular, the fresnel incoherent correlation holography (FINCH) is an exemplary method which improves the imaging resolution power and efficiency of incoherent digital holography, and it can obtain 3D distribution of objects swiftly without scanning and moving. However, compared with the conventional optical holography, the FINCH system has a very small field-of-view due to the limitation of the pixel number and size of spatial light modulator (SLM). Therefore, expanding the recording field-of-view of FINCH system is very significant for the application of IDH. In the FINCH, the SLM is used as a diffractive beam splitter so that each spherical beam, originating from each object point, is split into two spherical beams with two different curve radii. Then the interference fringes between the two beams are recorded by CCD. In this paper, the field-of-view angle recorded by the SLM is proposed and analyzed based on the physical and numerical principles of the FINCH system. The field-of-view of imaging system is improved by increasing the effective diameter of SLM through moving the center of the dual-lens optical axis mounted on the SLM to the edge in different directions respectively. An optical setup of reflection mode is constructed to verify the theoretical analysis of this study, and the sub-holograms in different field-of-views are obtained by CCD through changing the masks displayed on the SLM sequentially. Then, the complex holograms in different field-of-views are obtained by using the three-step phase-shifting method, and the reconstructed images are acquired respectively through the angular spectrum method (ASM) by using a computer. Finally, the large field-of-view image is obtained by stitching the reconstructed images in each field-of-view by utilizing the matlab program. The experimental results show that the efficient recording field-of-view of SLM can be increased by 2.77 times with our proposed method. Accordingly, the recording field-of-view of the system is improved significantly. The recording field-of-view of the FINCH system will increase further if the center of the dual-lens optical axis continues to move toward the edge. Therefore, this study provides an important support for the further application of high resolution microscopic imaging with large field-of-view.
-
Keywords:
- incoherent digital holography /
- spatial light modulator /
- imaging field-of-view /
- field-of-view splicing
[1] Gabor D 1948 Nature 161 777
 Google Scholar
Google Scholar
[2] Dubois F, Joannes L, Legros J C 1999 Appl. Opt. 38 7085
Google Scholar
[3] Pedrini G, Tiziani H J 2002 Appl. Opt. 41 4489
Google Scholar
[4] Lingfeng Yu, Myung K, Kim 2005 Opt. Lett. 30 2092
Google Scholar
[5] Brooker G, Rosen J 2007 Opt. Lett. 32 912
Google Scholar
[6] Kim, Myung K 2012 Opt. Lett. 37 2694
Google Scholar
[7] Xu T X, He J R, Ren H, Zhao Z C, Ma G Q, Gong Q X , Yang S N, Dong L , Ma F Y 2017 Opt. Express 25 29207
Google Scholar
[8] Man T L, Wan Y H, Chen H, Jiang Z Q, Jiang Z Q 2012 Opt. Eng. 8556 855613
Google Scholar
[9] 白云鹤, 臧瑞环, 汪盼, 荣腾达, 马凤英, 杜艳丽, 段智勇, 弓巧侠 2018 物理学报 67 064202
Google Scholar
Bai Y H, Zang R H, Wang P, Ma F Y, Du Y L, Duan Z Y, Gong Q X 2018 Acta Phys. Sin. 67 064202
Google Scholar
[10] Kashter Y, Vijayakumar A, Miyamoto Y, Rosen J 2016 Opt. Lett. 41 1588
Google Scholar
[11] Liu Y C, Lu X X, Tao T, Zhang D S, Deng J, Wang H K, Zhang Z, Zhong L Y 2013 Asia Communications and Photon Conference Guangzhou, China, November 7-10, 2013 p14
[12] 赵忠超, 杨旭锋, 许天旭, 何九如, 弓巧侠, 杜艳丽, 董林, 袁斌, 马凤英 2018 物理学报 67 014203
Google Scholar
Zhao Z C, Yang X F, Xu T X, He J R, Gong Q X, Du Y L, Dong L, Yuan B, Ma F Y 2018 Acta Phys. Sin. 67 014203
Google Scholar
[13] Brooker G, Siegel N, Wang V, Rosen J 2011 Opt. Express 19 5047
Google Scholar
[14] Katz B, Rosen J, Kelner R, Brooker G 2012 Opt. Express 20 9109
Google Scholar
[15] Rosen J, Siegel N, Brooker G 2011 Opt. Express 19 26249
Google Scholar
[16] Siegel N, Storrie B, Bruce M, Brooker G 2015 Opt. Eng. 9336 1
Google Scholar
[17] Yanagawa T, Abe R, Hayasaki Y 2015 Opt. Lett. 40 3312
Google Scholar
[18] Kashter Y, Rosen J 2014 Opt. Express 22 20551
Google Scholar
[19] Bang L T, Wu H Y, Zhao Y, Kim E G, Kim N 2016 J. Microsc. 265 372
Google Scholar
[20] 吴永丽, 杨勇, 翟宏琛, 马忠洪, 盖琦, 邓丽军 2013 物理学报 62 084203
Google Scholar
Wu Y L, Yang Y, Zhai H C, Ma Z H, Gai Q, Deng L J 2013 Acta Phys. Sin. 62 084203
Google Scholar
[21] Kim S, Im Y, Hahn J 2014 Opt. Eng. 9006 900613
Google Scholar
[22] Tahara T, Takahashi Y, Komura T, Kaku T, Arai Y 2015 J. Disp. Technol. 11 807
-
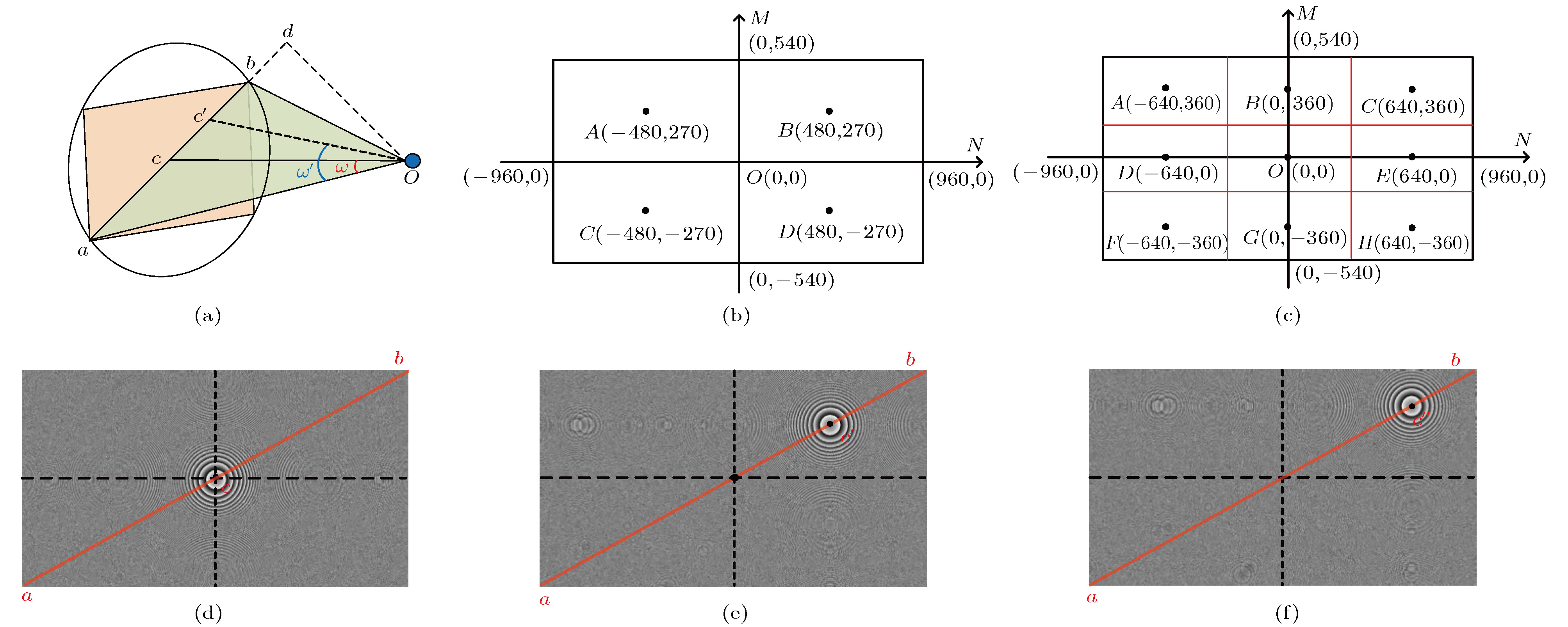
图 2 FINCH大视场成像原理图 (a) SLM记录视场角; (b)四次记录光轴中心位置; (c)九次记录光轴中心位置; (d)光轴中心处于图(b)中O点时的掩模; (e)光轴中心处于图(b)中B点时的掩模; (f)光轴中心处于图(c)中C点时的掩模
Fig. 2. Schematic diagrams of FINCH with large field-of-view imaging: (a) The recording field-of-view angle of SLM; (b) the central position of the optical axis for recording four times; (c) central position of optical axis for recording nine times; (d) optical axis center is at point O of (b); (e) optical axis center is at point B of (b); (f) optical axis center is at point C of (c).
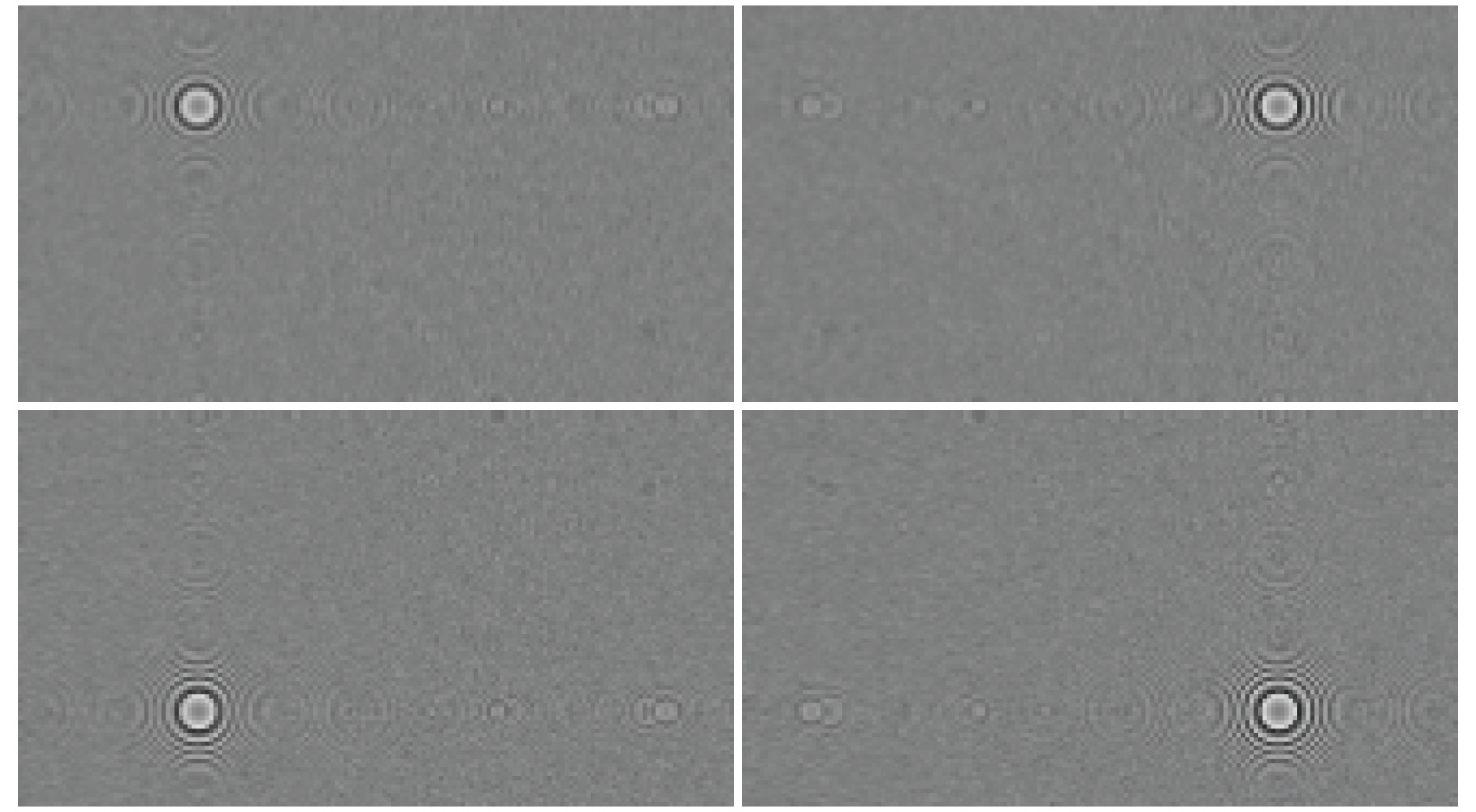
图 3 双透镜光轴中心处于四个不同位置的掩模
Fig. 3. The masks with the center of dual-lens optical axis in four different positions
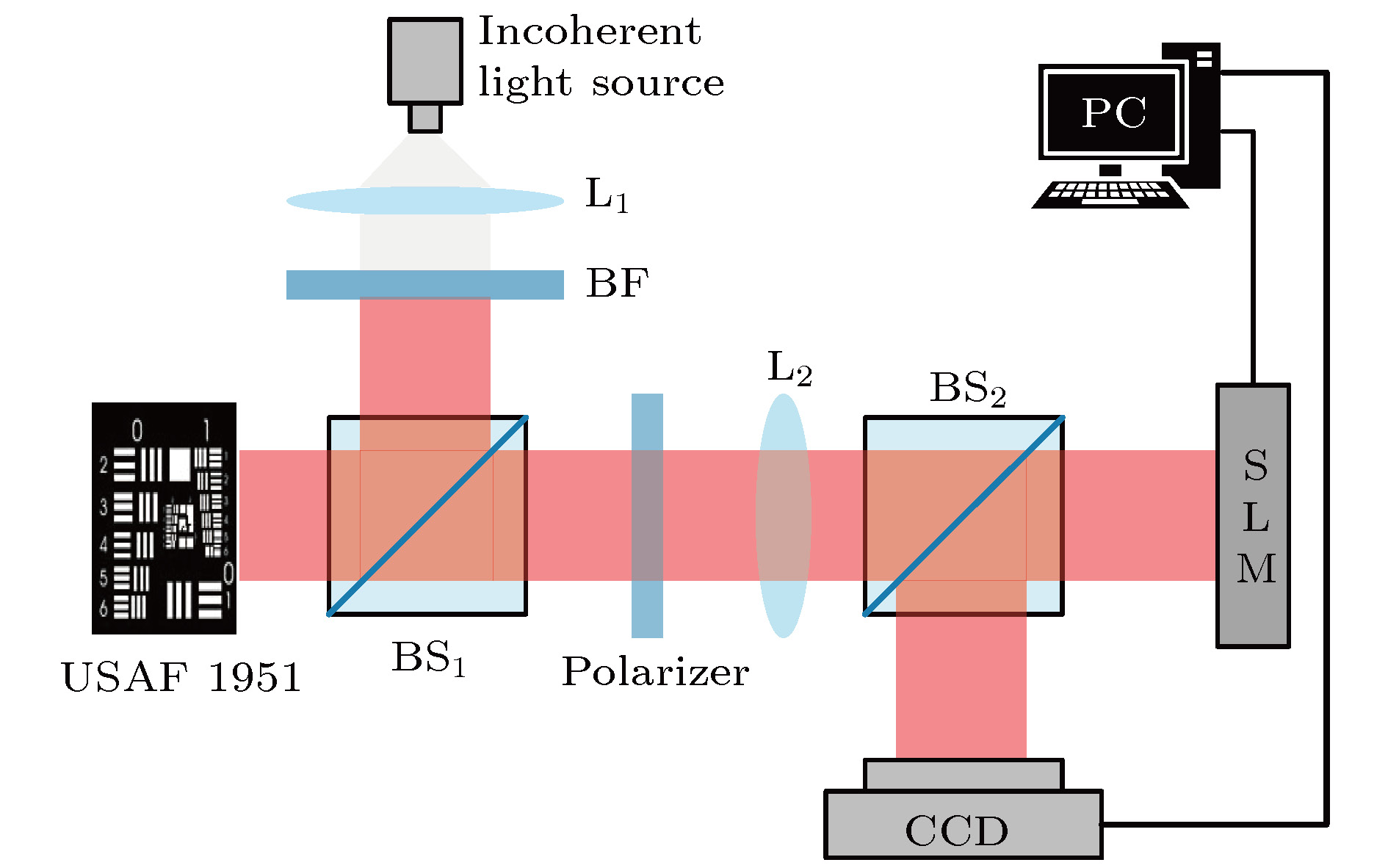
图 4 非相干光反射式数字全息实验光路
Fig. 4. Experimental set-up of incoherent light reflection digital holography

图 5 USAF1951分辨率板重建像 (a)−(d)分别为加载图3中掩模所得; (e)常规再现像; (f)大视场图像; (g)为(b)红线处的强度分布曲线图; (h)为(e)红线处的强度分布曲线
Fig. 5. Reconstruction images of USAF1951 resolution plate: (a)−(d) are mounted with Fig. 3 (d) masks, respectively; (e) normal reconstruction images; (f) large field-of-view images; (g) the intensity distribution at the position of the red line of (b); (h) the intensity distribution at the position of the red line of (e)
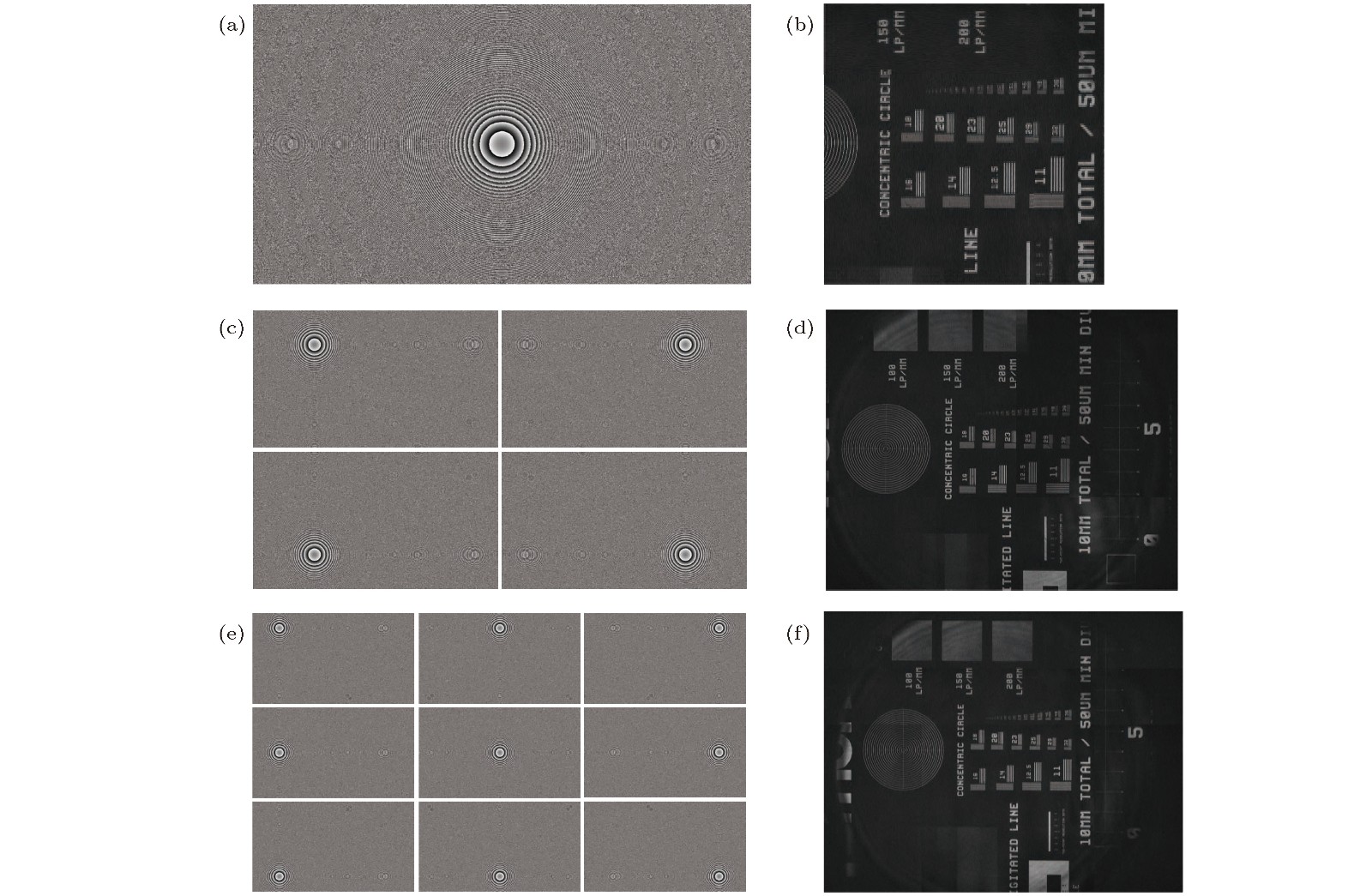
图 6 R1L3S5P分辨率板重建像 (a)常规掩模; (b)常规再现像; (c)四次记录掩模; (d)由四个子图像拼接得到的大视场图像; (e)九次记录掩模; (f)由九个子图像拼接得到的大视场图像
Fig. 6. Reconstruction images of R1L3S5P resolution plate: (a) Conventional mask; (b) conventional reconstruction image; (c) masks of four records; (d) large field-of-view images obtained by splicing four sub-images; (e) masks of nine records; (f) large field-of-view images obtained from nine sub-images
-
[1] Gabor D 1948 Nature 161 777
Google Scholar
[2] Dubois F, Joannes L, Legros J C 1999 Appl. Opt. 38 7085
Google Scholar
[3] Pedrini G, Tiziani H J 2002 Appl. Opt. 41 4489
Google Scholar
[4] Lingfeng Yu, Myung K, Kim 2005 Opt. Lett. 30 2092
Google Scholar
[5] Brooker G, Rosen J 2007 Opt. Lett. 32 912
Google Scholar
[6] Kim, Myung K 2012 Opt. Lett. 37 2694
Google Scholar
[7] Xu T X, He J R, Ren H, Zhao Z C, Ma G Q, Gong Q X , Yang S N, Dong L , Ma F Y 2017 Opt. Express 25 29207
Google Scholar
[8] Man T L, Wan Y H, Chen H, Jiang Z Q, Jiang Z Q 2012 Opt. Eng. 8556 855613
Google Scholar
[9] 白云鹤, 臧瑞环, 汪盼, 荣腾达, 马凤英, 杜艳丽, 段智勇, 弓巧侠 2018 物理学报 67 064202
Google Scholar
Bai Y H, Zang R H, Wang P, Ma F Y, Du Y L, Duan Z Y, Gong Q X 2018 Acta Phys. Sin. 67 064202
Google Scholar
[10] Kashter Y, Vijayakumar A, Miyamoto Y, Rosen J 2016 Opt. Lett. 41 1588
Google Scholar
[11] Liu Y C, Lu X X, Tao T, Zhang D S, Deng J, Wang H K, Zhang Z, Zhong L Y 2013 Asia Communications and Photon Conference Guangzhou, China, November 7-10, 2013 p14
[12] 赵忠超, 杨旭锋, 许天旭, 何九如, 弓巧侠, 杜艳丽, 董林, 袁斌, 马凤英 2018 物理学报 67 014203
Google Scholar
Zhao Z C, Yang X F, Xu T X, He J R, Gong Q X, Du Y L, Dong L, Yuan B, Ma F Y 2018 Acta Phys. Sin. 67 014203
Google Scholar
[13] Brooker G, Siegel N, Wang V, Rosen J 2011 Opt. Express 19 5047
Google Scholar
[14] Katz B, Rosen J, Kelner R, Brooker G 2012 Opt. Express 20 9109
Google Scholar
[15] Rosen J, Siegel N, Brooker G 2011 Opt. Express 19 26249
Google Scholar
[16] Siegel N, Storrie B, Bruce M, Brooker G 2015 Opt. Eng. 9336 1
Google Scholar
[17] Yanagawa T, Abe R, Hayasaki Y 2015 Opt. Lett. 40 3312
Google Scholar
[18] Kashter Y, Rosen J 2014 Opt. Express 22 20551
Google Scholar
[19] Bang L T, Wu H Y, Zhao Y, Kim E G, Kim N 2016 J. Microsc. 265 372
Google Scholar
[20] 吴永丽, 杨勇, 翟宏琛, 马忠洪, 盖琦, 邓丽军 2013 物理学报 62 084203
Google Scholar
Wu Y L, Yang Y, Zhai H C, Ma Z H, Gai Q, Deng L J 2013 Acta Phys. Sin. 62 084203
Google Scholar
[21] Kim S, Im Y, Hahn J 2014 Opt. Eng. 9006 900613
Google Scholar
[22] Tahara T, Takahashi Y, Komura T, Kaku T, Arai Y 2015 J. Disp. Technol. 11 807

 下载:
下载:
计量
- 文章访问数: 15709
- PDF下载量: 199
- 被引次数: 0
