










-
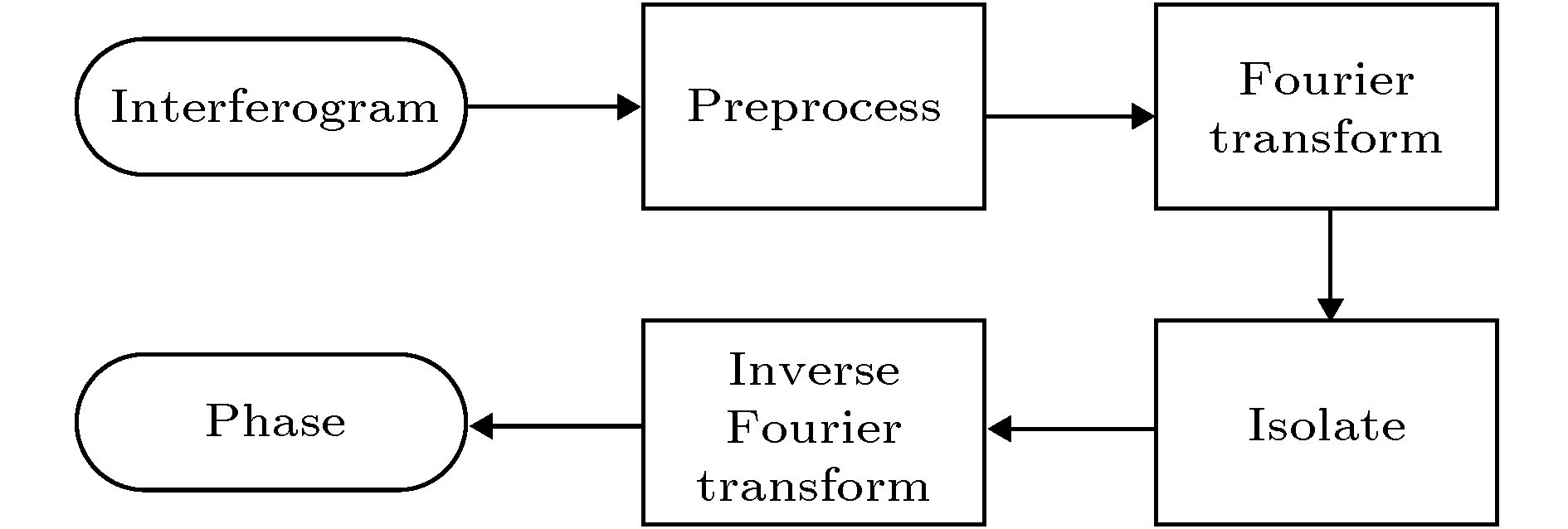
多普勒差分干涉仪通过测量干涉图相位变化反演大气风速. 干涉图信噪比是工程应用中影响测风干涉仪相位反演精度的核心指标之一, 基于观测数据分析多普勒差分干涉仪中相位不确定度与干涉图信噪比之间的定量关系建立解析模型, 对仪器设计、性能评价及风场数据应用具有重要意义. 本文基于傅里叶变换光谱学噪声传递理论和多普勒差分干涉仪相位反演模型, 建立干涉图信噪比与相位不确定度传递的理论模型. 利用多组不同信噪比仿真及实验实测数据, 将相位反演模型计算的统计结果与本文提出的理论模型分析结果进行比较验证, 结果表明, 多组实验数据平均残差小于0.07 mrad, 两者的一致性较好, 建立的模型为多普勒差分干涉仪效能评估、干涉仪设计优化提供理论依据.Passive atmospheric wind detection technique retrieves atmospheric wind profile by measuring the Doppler shift of airglow emissions. Doppler asymmetric spatial heterodyne spectrometer (DASH), which is a Fourier transform spectrometer(FTS), retrieves the Doppler shift information of airglow emissions by detecting the phase shift of interferograms, and the measured phase accuracy directly affects the retrieved wind speed precision. The signal-to-noise (SNR) ratio is one of the significant indexes for evaluating the performance of wind-measuring interferometers in engineering applications. Studying the quantitative relationship between retrieved phase uncertainty and original interferogram SNR that is based on observations is quite essential for the DASH design, performance evaluation and wind profile applications. In this paper, the study is based on the noise propagation theory in FTS and DASH phase retrieval model. According to the Fourier transform relationship between time and frequency domain, we start from original interferogram expression, then we conduct the Fourier transforming, single frequency extracting, inverse Fourier transforming, phase calculating and first-order Taylor expanding, and finally we establish a theoretical relationship model between original interferogram SNR and retrieved phase uncertainty. In order to verify the theoretical relationship model, firstly, we generate 20 groups of interferograms (each group with 1000 frames) randomly with varying the 30–250 times SNR value. After removing the low frequency baseline, we calculate the phase of each interferogram by DASH phase retrieval model, and obtain the phase uncertainty by calculating standard deviation of the 512th sampling of each group interferogram. Another phase retrieval uncertainty is obtained by using the theoretical relationship model between SNR and retrieved phase uncertainty derived from this paper. Secondly, a total of 23 groups of experimental interferograms (each group with 100 frames) with different intensities are collected through the self-developed DASH with a center wavelength of 632.8 nm, basic optical path difference of 50 mm, spectral resolution of 0.78 cm−1. Combining physical characteristics of shot noise and DASH parameters, interferogram SNR of each frame is calculated. We calculate phase uncertainty of experimental data through the two methods mentioned above. The results from the two different calculation methods are compared with each other to determine whether the conclusion is correct. In order to improve the accuracy of phase calculation, three lines are averaged as input to reduce the random error. The average residual between the two methods is only 0.03 mrad, the high consistency of the results indicates that the theoretical relationship model between SNR and retrieved phase uncertainty for DASH is correct. The phase uncertainty can be evaluated by interferogram SNR directly in engineering, which provides a theoretical basis for optimizing the interferometer design.
-
Keywords:
- phase retrieval /
- Doppler asymmetric spatial heterodyne spectrometer /
- atmospheric wind measurement /
- photon noise
[1] Perkins C P, Kerekes J P, Gartley M G 2013 Proceedings of 2013 Imaging Spectrometry XVIII. International Society for Optics and Photonics San Diego, USA, August 26–28, 2013. 8870 88700 R
[2] 冯玉涛, 孙剑, 李勇, 王姝娜, 白清兰 2015 光学精密工程 23 48
Feng Y T, Sun J, Li Y, Wang S N, Bai Q L 2015 Opt. Precision Eng. 23 48
[3] 陈洁婧, 冯玉涛, 胡炳樑, 李娟, 孙剑, 郝雄波, 白清兰 2017 光学学报 37 84
Chen J J, Feng Y T, Hu B L, Li J, Sun J, Hao X B, Bai Q L 2017 Acta Optica. Sin. 37 84
[4] 冯玉涛, 武魁军, 傅頔, 郝雄波, 武俊强, 付建国, 胡炳樑 2019 光子学报 48 1
Feng Y T, Wu K J, Fu D, Hao X B, Wu J Q, Fu J G, Hu B L 2019 Acta Photon. Sin. 48 1
[5] Wu K, Fu D, Feng Y, Li J, Hao X, Li F 2018 Opt. Express. 26 16984
 Google Scholar
Google Scholar
[6] Englert C R, Babcock D D, Harlander J M 2007 Appl. Opt. 46 7297
Google Scholar
[7] Englert C R, Harlander J M 2006 Appl. Opt. 45 4583
Google Scholar
[8] Englert C R, Harlander J M, Babcock D D, Stevens M H, Siskind D E 2006 Proceedings of 2006 Atmospheric Optical Modeling, Measurement, and Simulation II San Diego, USA, September 1, 2006 p63030 T
[9] Englert C R, Stevens M H, Siskind D E, Harlander J M, Roesler F L 2007 Proceedings of 2007 Fourier Transform Spectroscopy Santa Fe, USA, February 11−15, 2007 FThA3
[10] Englert C R, Harlander J M, Emmert J T, Babcock D D, Roesler F L 2010 Opt. Express. 18 27416
Google Scholar
[11] Harlander J M, Englert C R, Babcock D D, Roesler F L 2010 Opt. Express. 18 26430
Google Scholar
[12] Englert C R, Babcock D, Roesler F, Harlander J 2011 Proceedings of 2011 Imaging and Applied Opics Toronto, Canada, July 10−14, 2011 FWB2
[13] Marr K D, Englert C R, Harlander J M 2012 Opt. Express. 20 9535
Google Scholar
[14] Harding B J, Makela J J, Englert C R, Marr K D, Harlander J M, England S L, Immel T J 2017 Space. Sci Rev. 212 585
Google Scholar
[15] Englert C R, Harlander J M, Brown C, Makela J, Marr K, Immel T 2015 Proceedings of 2015 Fourier Transform Spectroscopy and Hyperspectral Imaging and Sounding of the Environment Lake Arrowhead, USA, March 1−4, 2015 FM4 A.1
[16] WANG S, XIANGLI B 2014 Spectrosc. Spect Anal. 34 851
[17] 罗海燕, 熊伟, 施海亮, 李志伟 2017 光学学报 37 102
Luo H Y, Xiong W, Shi H L, Li Zh W 2017 Acta Optica. Sin. 37 102
[18] 张宣妮, 张淳民, 艾晶晶 2013 物理学报 62 030701
Zhang X N, Zhang C M, AI J J 2013 Acta Phys. Sin. 62 030701
[19] Pritt A T, Kupferman P N, Young S J, Keller R A 1997 Proceedings of SPIE - The International Society for Optical Engineering San Diego, USA, July 30–August 1, 1997 3063 138
[20] Marr K D, Englert C R, Harlander J M, Miller K W 2013 Appl. Opt. 52 8082
Google Scholar
[21] 费小云 2015 硕士学位论文 (北京: 中国科学院大学)
Fei X Y 2015 M.S. Thesis (Beijing: University of Chinese Academy of Sciences)
-
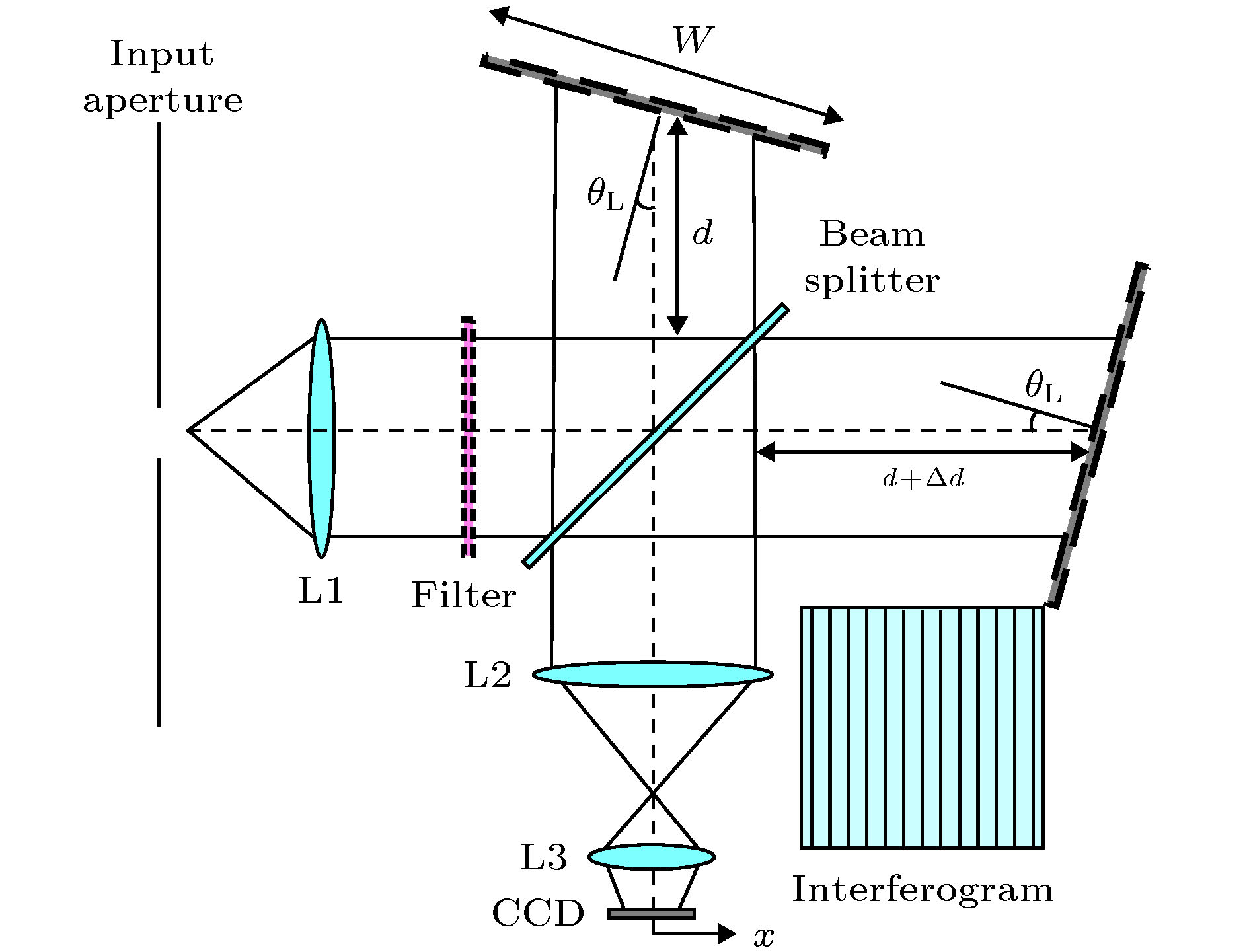
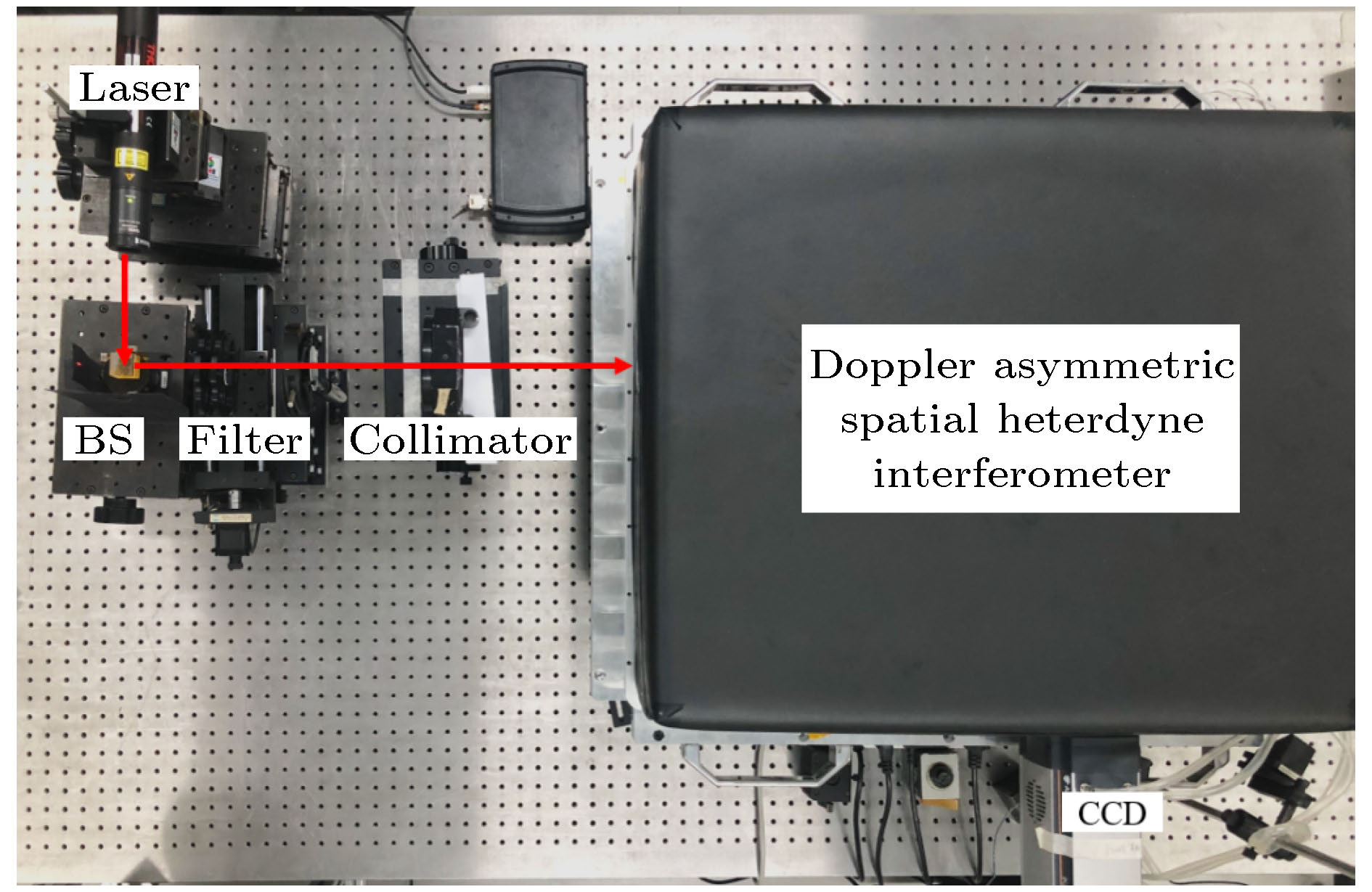
图 1 多普勒差分干涉仪原理图
Fig. 1. Schematic of the Doppler asymmetric spatial heterodyne interferometer.
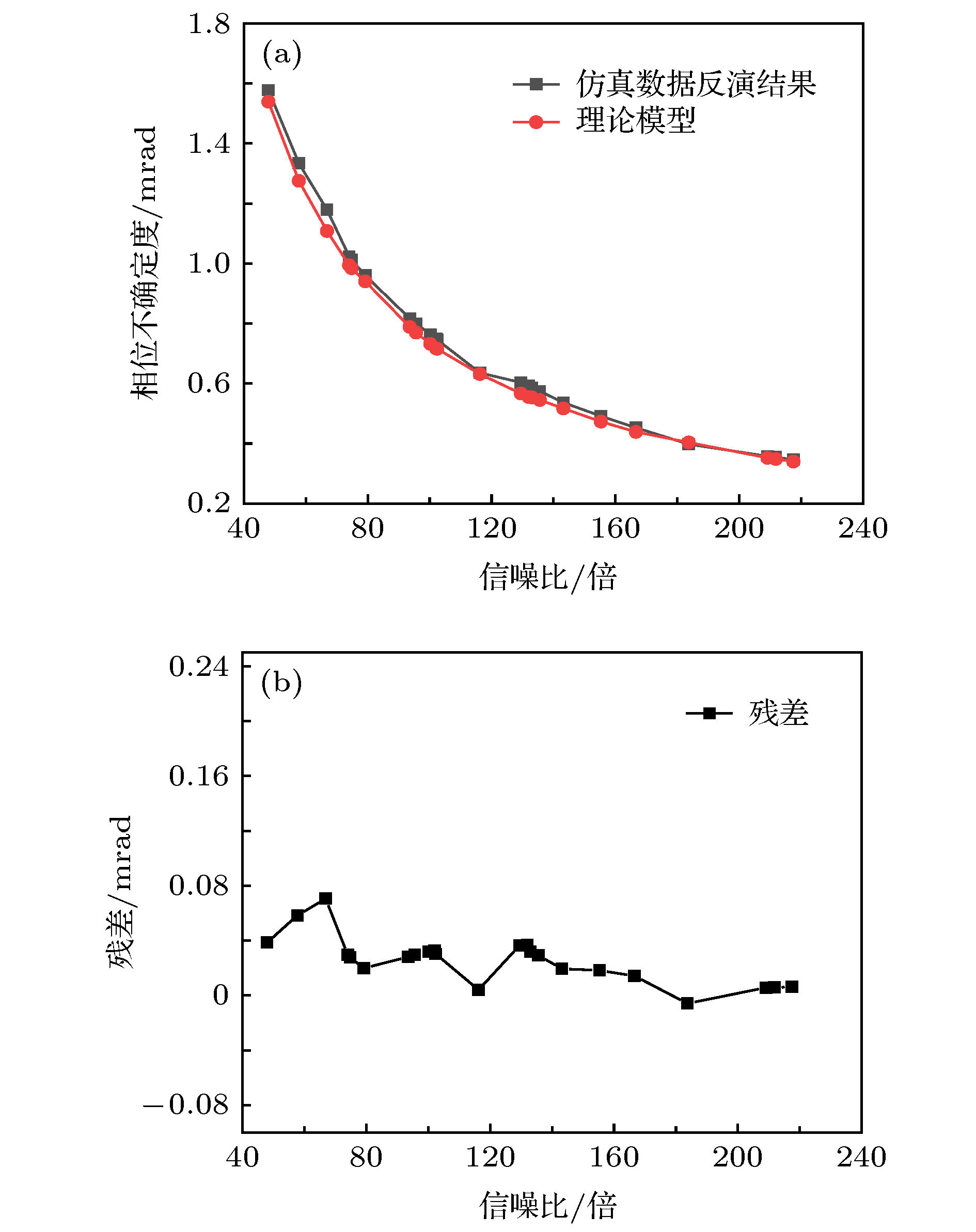
图 3 信噪比与相位不确定度仿真结果及残差 (a)为相位反演模型与理论模型计算的相位不确定度; (b)为两种计算结果残差
Fig. 3. Simulation results of retrieved phase uncertainty and residual with different SNR: (a) Phase uncertainty of two models; (b) the differences between two results.
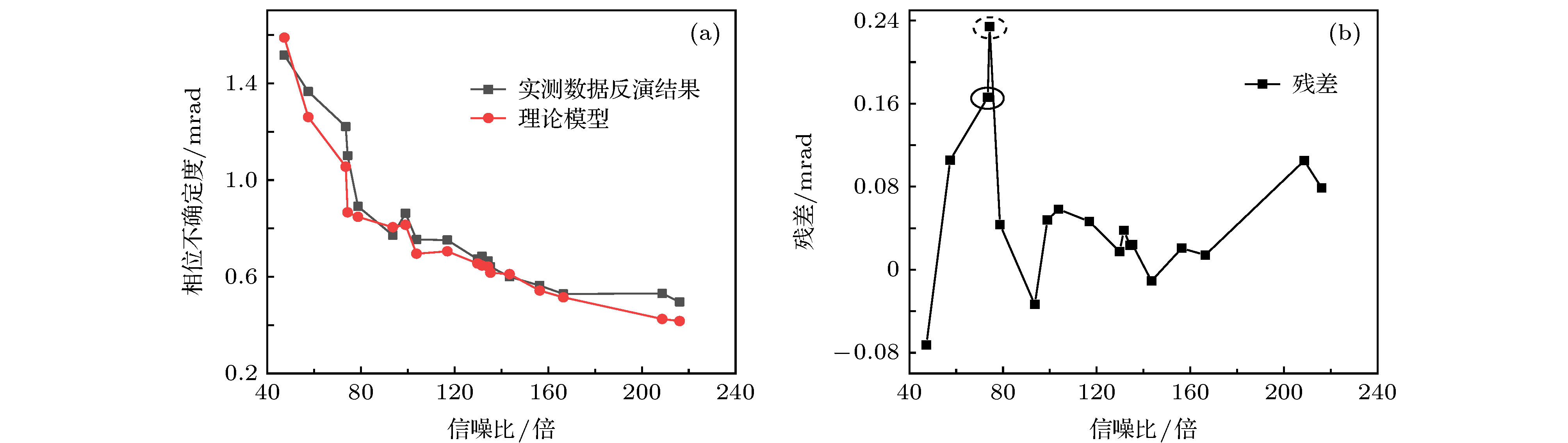
图 6 变积分时间实测数据计算结果及残差 (a)为相位反演模型与理论模型计算的相位不确定度; (b)为两种计算结果残差
Fig. 6. Experimental results of retrieved phase uncertainty and residual with same attenuation coefficient and different integration time: (a) Phase uncertainty of two models; (b) the differences between two results.
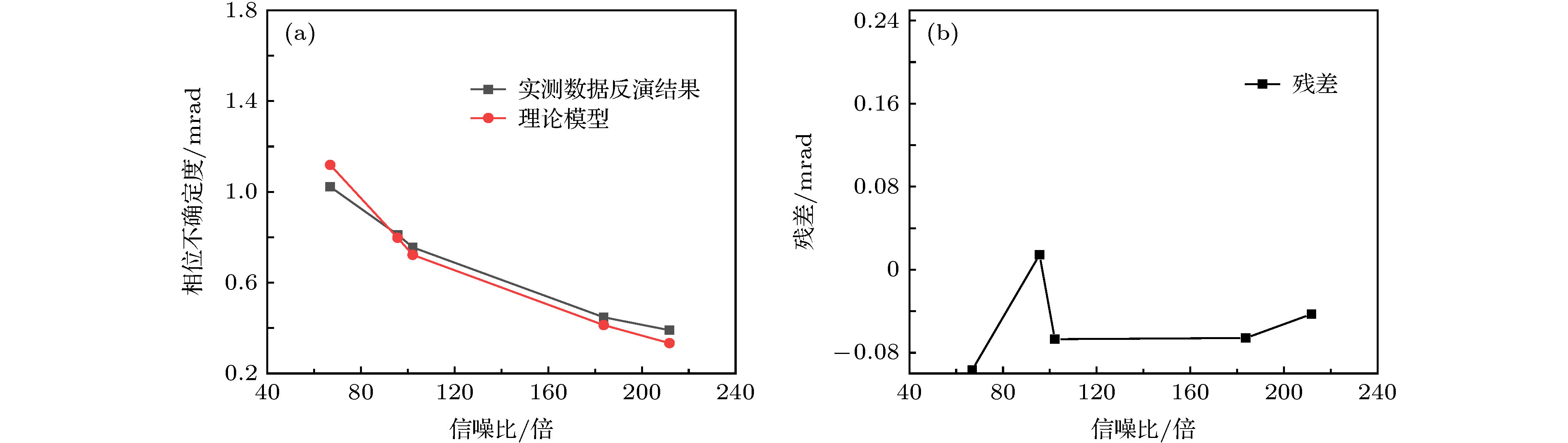
图 7 变衰减片实测数据计算结果及残差 (a)为相位反演模型与理论模型计算的相位不确定度; (b)为两种计算结果残差
Fig. 7. Experimental results of retrieved phase uncertainty and residual with different attenuation coefficients: (a) Phase uncertainty of two models; (b) the differences between two results
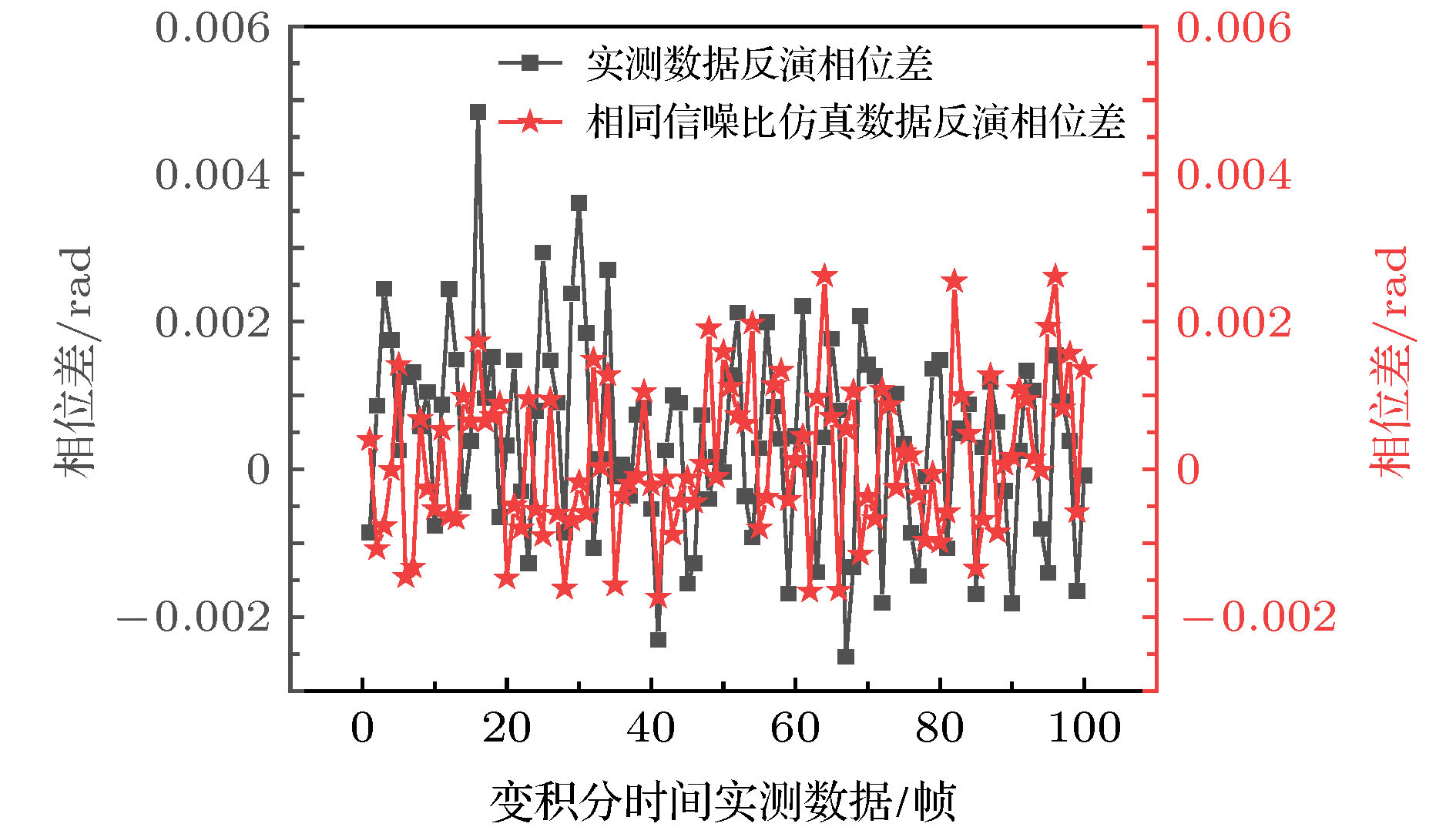
图 8 相同信噪比实测数据与仿真数据对比分析
Fig. 8. Comparison and analysis of measured and simulated data with the same SNR.
表 1 多普勒差分干涉仪主要参数
Table 1. Principle components.
干涉仪 基础光程差 50 mm 光谱分辨率 0.78 cm–1 探测器 量化位数 16 bit 满阱电荷 100000 e–1 读出噪声(5 MHz) 18 e–1 暗电流噪声(–75 ℃) 0.0003 e–1/pixel/sec  下载: 导出CSV
下载: 导出CSV
-
[1] Perkins C P, Kerekes J P, Gartley M G 2013 Proceedings of 2013 Imaging Spectrometry XVIII. International Society for Optics and Photonics San Diego, USA, August 26–28, 2013. 8870 88700 R
[2] 冯玉涛, 孙剑, 李勇, 王姝娜, 白清兰 2015 光学精密工程 23 48
Feng Y T, Sun J, Li Y, Wang S N, Bai Q L 2015 Opt. Precision Eng. 23 48
[3] 陈洁婧, 冯玉涛, 胡炳樑, 李娟, 孙剑, 郝雄波, 白清兰 2017 光学学报 37 84
Chen J J, Feng Y T, Hu B L, Li J, Sun J, Hao X B, Bai Q L 2017 Acta Optica. Sin. 37 84
[4] 冯玉涛, 武魁军, 傅頔, 郝雄波, 武俊强, 付建国, 胡炳樑 2019 光子学报 48 1
Feng Y T, Wu K J, Fu D, Hao X B, Wu J Q, Fu J G, Hu B L 2019 Acta Photon. Sin. 48 1
[5] Wu K, Fu D, Feng Y, Li J, Hao X, Li F 2018 Opt. Express. 26 16984
Google Scholar
[6] Englert C R, Babcock D D, Harlander J M 2007 Appl. Opt. 46 7297
Google Scholar
[7] Englert C R, Harlander J M 2006 Appl. Opt. 45 4583
Google Scholar
[8] Englert C R, Harlander J M, Babcock D D, Stevens M H, Siskind D E 2006 Proceedings of 2006 Atmospheric Optical Modeling, Measurement, and Simulation II San Diego, USA, September 1, 2006 p63030 T
[9] Englert C R, Stevens M H, Siskind D E, Harlander J M, Roesler F L 2007 Proceedings of 2007 Fourier Transform Spectroscopy Santa Fe, USA, February 11−15, 2007 FThA3
[10] Englert C R, Harlander J M, Emmert J T, Babcock D D, Roesler F L 2010 Opt. Express. 18 27416
Google Scholar
[11] Harlander J M, Englert C R, Babcock D D, Roesler F L 2010 Opt. Express. 18 26430
Google Scholar
[12] Englert C R, Babcock D, Roesler F, Harlander J 2011 Proceedings of 2011 Imaging and Applied Opics Toronto, Canada, July 10−14, 2011 FWB2
[13] Marr K D, Englert C R, Harlander J M 2012 Opt. Express. 20 9535
Google Scholar
[14] Harding B J, Makela J J, Englert C R, Marr K D, Harlander J M, England S L, Immel T J 2017 Space. Sci Rev. 212 585
Google Scholar
[15] Englert C R, Harlander J M, Brown C, Makela J, Marr K, Immel T 2015 Proceedings of 2015 Fourier Transform Spectroscopy and Hyperspectral Imaging and Sounding of the Environment Lake Arrowhead, USA, March 1−4, 2015 FM4 A.1
[16] WANG S, XIANGLI B 2014 Spectrosc. Spect Anal. 34 851
[17] 罗海燕, 熊伟, 施海亮, 李志伟 2017 光学学报 37 102
Luo H Y, Xiong W, Shi H L, Li Zh W 2017 Acta Optica. Sin. 37 102
[18] 张宣妮, 张淳民, 艾晶晶 2013 物理学报 62 030701
Zhang X N, Zhang C M, AI J J 2013 Acta Phys. Sin. 62 030701
[19] Pritt A T, Kupferman P N, Young S J, Keller R A 1997 Proceedings of SPIE - The International Society for Optical Engineering San Diego, USA, July 30–August 1, 1997 3063 138
[20] Marr K D, Englert C R, Harlander J M, Miller K W 2013 Appl. Opt. 52 8082
Google Scholar
[21] 费小云 2015 硕士学位论文 (北京: 中国科学院大学)
Fei X Y 2015 M.S. Thesis (Beijing: University of Chinese Academy of Sciences)

 下载:
下载:
计量
- 文章访问数: 15372
- PDF下载量: 140
- 被引次数: 0
