










-
为提高传统光滑粒子动力学(SPH)方法求解高维非线性薛定谔(nonlinear Schrödinger/Gross-Pitaevskii equation, NLS/GP)方程的数值精度和计算效率, 本文首先基于高阶时间分裂思想将非线性薛定谔方程分解成线性导数项和非线性项, 其次拓展一阶对称SPH方法对复数域上线性导数部分进行显式求解, 最后引入MPI并行技术, 结合边界施加虚粒子方法给出一种能够准确、高效地求解高维NLS/GP方程的高阶分裂修正并行SPH方法. 数值模拟中, 首先对带有周期性和Dirichlet边界条件的NLS方程进行求解, 并与解析解做对比, 准确地得到了周期边界下孤立波的奇异性, 且对提出方法的数值精度、收敛速度和计算效率进行了分析; 随后, 运用给出的高阶分裂粒子方法对复杂二维和三维NLS/GP问题进行了数值预测, 并与其他数值结果进行比较, 准确地展现了非线性孤立波传播中的奇异现象和玻色-爱因斯坦凝聚态中带外旋转项的量子涡旋变化过程.
-
关键词:
- 非线性薛定谔方程 /
- 光滑粒子动力学 /
- 时间分裂 /
- 玻色-爱因斯坦凝聚态
To improve the numerical accuracy and computational efficiency of solving high-dimensional nonlinear Schrödinger/Gross-Pitaevskii (NLS/GP) equation by using traditional SPH method, a high-order split-step coupled with a corrected parallel SPH (HSS-CPSPH) method is developed by applying virtual particles to the boundary. The improvements are described as follows. Firstly, the nonlinear Schrödinger equation is divided into linear derivative term and nonlinear term based on the high-order split-step method. Then, the linear derivative term is solved by extending the first-order symmetric SPH method in explicit time integration. Meanwhile, the MPI parallel technique is introduced to enhance the computational efficiency. In this work, the accuracy, convergence and the computational efficiency of the proposed method are tested by solving the NLS equations with the periodic and Dirichlet boundary conditions, and compared with the analytical solutions. Also, the singularity of solitary waves under the periodic boundary condition is accurately obtained using the proposed particle method. Subsequently, the proposed HSS-CPSPH method is used to predict the results of complex two-dimensional and three-dimensioanl GP problems which are compared with other numerical results. The phenomenon of singular sharp angle in the propagation of nonlinear solitary wave and the process of quantum vortex under Bose-Einstein condensates with external rotation are presented accurately.-
Keywords:
- nonlinear Schrödinger equation /
- smoothed particle hydrodynamics /
- time split-step /
- Bose-Einstein condensates
[1] Bandrauk A D, Shen H 1994 J. Phys. A: Gen. Phys. 27 7147
 Google Scholar
Google Scholar
[2] Yoshida H 1990 Phys. Lett. A 150 262
Google Scholar
[3] Wang T C, Guo B L, Xu Q B 2013 J. Comput. Phys. 243 382
Google Scholar
[4] Cheng R J, Cheng Y M 2016 Chin. Phys. B 25 020203
Google Scholar
[5] Wang D S, Xue Y S, Zhang Z F 2016 Rom. J. Phys. 61 827
[6] Bao W Z, Wang H Q 2006 J. Comput. Phys. 217 612
Google Scholar
[7] Bao W Z, Shen J 2005 SIAM J. Sci. Comput. 26 2010
Google Scholar
[8] Wang H Q 2005 Appl. Math. Comput. 170 17
Google Scholar
[9] Chen R Y, Nie L R, Chen C Y 2018 Chaos 28 053115
Google Scholar
[10] Chen RY, Nie L R, Chen C Y, Wang C J 2017 J. Stat. Mech. 2017 013201
Google Scholar
[11] Chen R Y, Pan W L, Zhang J Q, Nie L R 2016 Chaos 26 093113
Google Scholar
[12] Chen R Y, Tong L M, Nie L R , Wang C I, Pan W 2017 Physica A 468 532
Google Scholar
[13] Gao Y L, Mei L Q 2016 Appl. Numer. Math. 109 41
Google Scholar
[14] Xu Y, Shu C W 2005 J. Comput. Phys. 205 72−97
Google Scholar
[15] Jiang T, Chen Z C, Lu W G, Yuan J Y, Wang D S 2018 Comput. Phys. Commun. 231 19
Google Scholar
[16] Liu M B, Liu G R 2010 Arch. Comput. Meth. Eng. 17 25
Google Scholar
[17] 蒋涛, 陈振超, 任金莲, 李刚 2017 物理学报 66 130201
Google Scholar
Jiang T, Chen Z C, Ren J L, Li G 2017 Acta Phys. Sin. 66 130201
Google Scholar
[18] Chen J K, Beraun J E 2000 Comput. Meth. Appl. Mech. Eng. 190 225
Google Scholar
[19] Liu G R, Liu M B 2003 Smoothed Particle Hydrodynamics: A Mesh-free Particle Method (Singapore: World Scientific)
[20] Crespo A J C, Domínguez J M, Rogers B D, Gómez-Gesteira M, Longshaw S, Canelas R, Vacondio R, Barreiro A, García-Feal O 2015 Comput. Phys. Commun. 187 204
Google Scholar
[21] Ren J L, Jiang T, Lu W G, Li G 2016 Comput. Phys. Commun. 205 87
Google Scholar
[22] 刘谋斌, 常建忠 2010 物理学报 59 3654
Google Scholar
Liu M B, Chang J Z 2010 Acta Phys. Sin. 59 3654
Google Scholar
[23] Sun P N, Colagrosso A, Marrone S, Zhang A M 2016 Comput. Meth. Appl. Mech. Eng. 305 849
Google Scholar
[24] Huang C, Lei J M, Liu M B, Peng X Y 2015 Int. J. Numer. Methods Fluids 78 691
Google Scholar
[25] Huang C, Zhang D H, Shi Y X, Si Y L, Huang B 2018 Int. J. Numer. Meth. Eng. 113 179
Google Scholar
[26] Weideman J A C, Herbst B M 1986 SIAM J. Numer. Anal. 23 485
Google Scholar
-
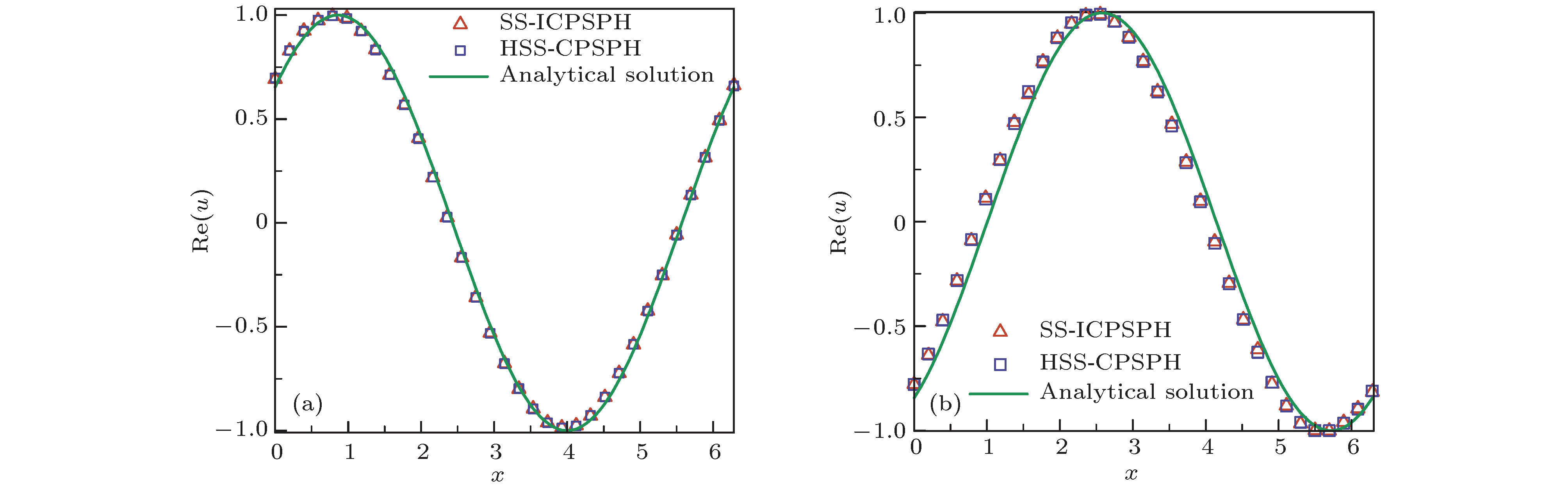
图 1
${k_{\rm{1}}} = {k_{\rm{2}}} = 1,\;h = {\text{π}}/64$ 时不同时刻$u\left( {x,{\text{π}}} \right)$ 的实部沿x轴的变化 (a)$t=1$ ; (b)$t = 3$ Fig. 1. Curve of the
$\operatorname{Re} \left( {u\left( {x,{\text{π}}} \right)} \right)$ along x-axis at different time with${k_{\rm{1}}} = {k_{\rm{2}}} = 1,\;h = {\text{π}}/64$ : (a)$t=1$ ; (b)$t = 3$ .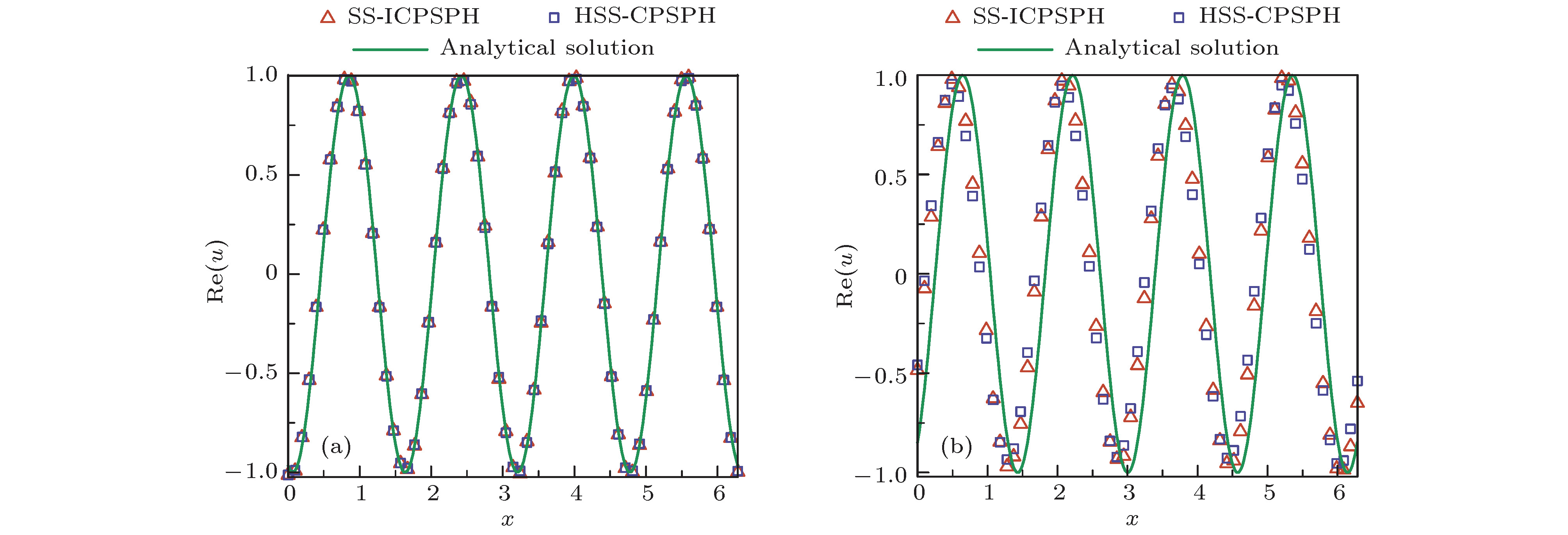
图 2
${k_{\rm{1}}} = {k_{\rm{2}}} = 4,\;h = {\text{π}}/128$ 时不同时刻$u\left( {x,{\text{π}}} \right)$ 的实部沿x轴的变化 (a) t = 0.1; (b) t = 1Fig. 2. Curve of the
$\operatorname{Re} \left( {u\left( {x,{\text{π}}} \right)} \right)$ along x-axis at different time with${k_{\rm{1}}} = {k_{\rm{2}}} = 4,\;h = {\text{π}}/128$ : (a) t = 0.1; (b) t = 1.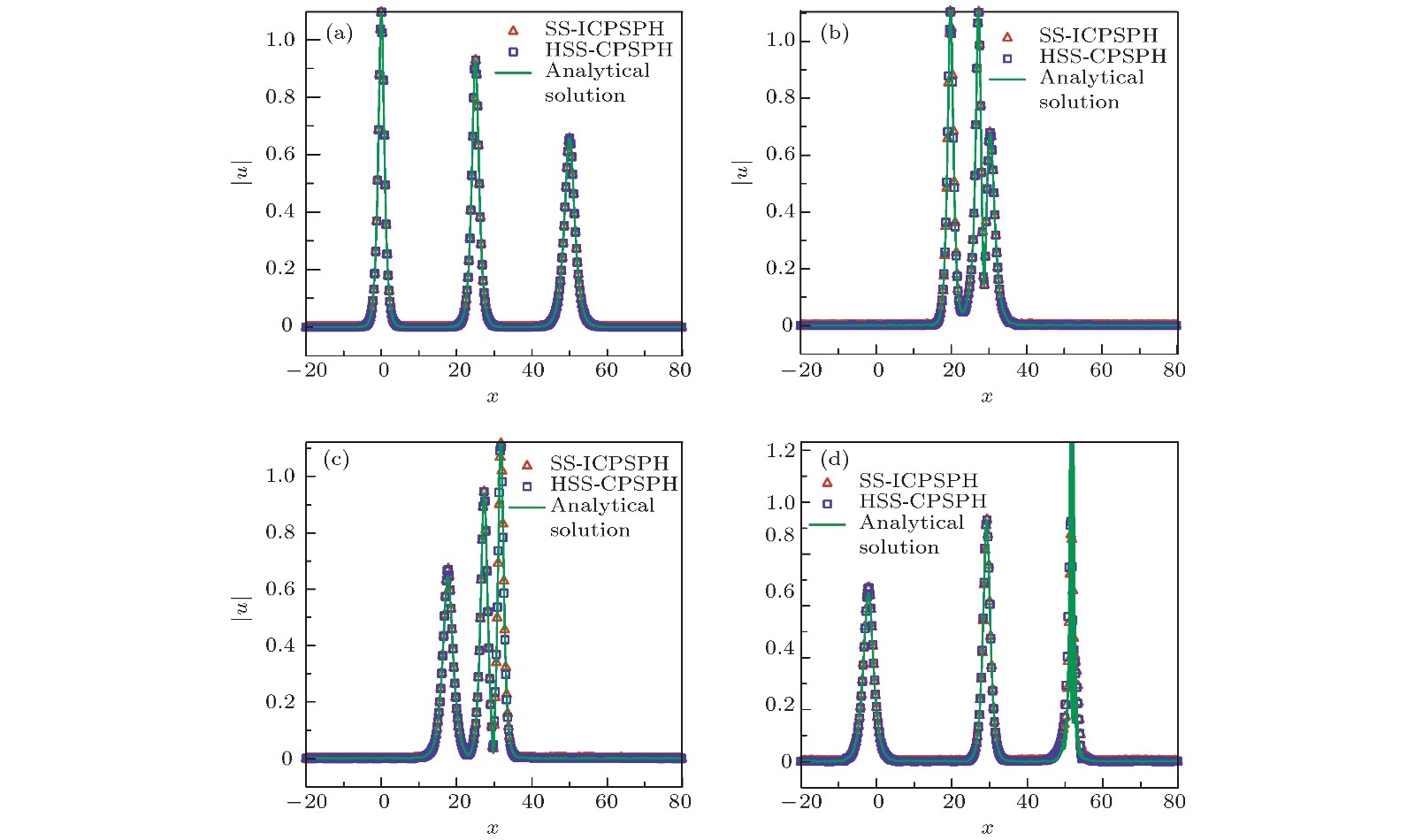
图 4 初始条件2下, 在4个不同时刻三孤立子波函数
$\left| u \right|$ 的传播过程 (a)$t=0$ ; (b)$t = 20$ ; (c)$t = 30$ ; (d)$t = 50$ Fig. 4. Solitary wave propagation process of
$\left| u \right|$ at different time with initial condition 2: (a)$t=0$ ; (b)$t = 20$ ; (c)$t = 30$ ; (d)$t = 50$ .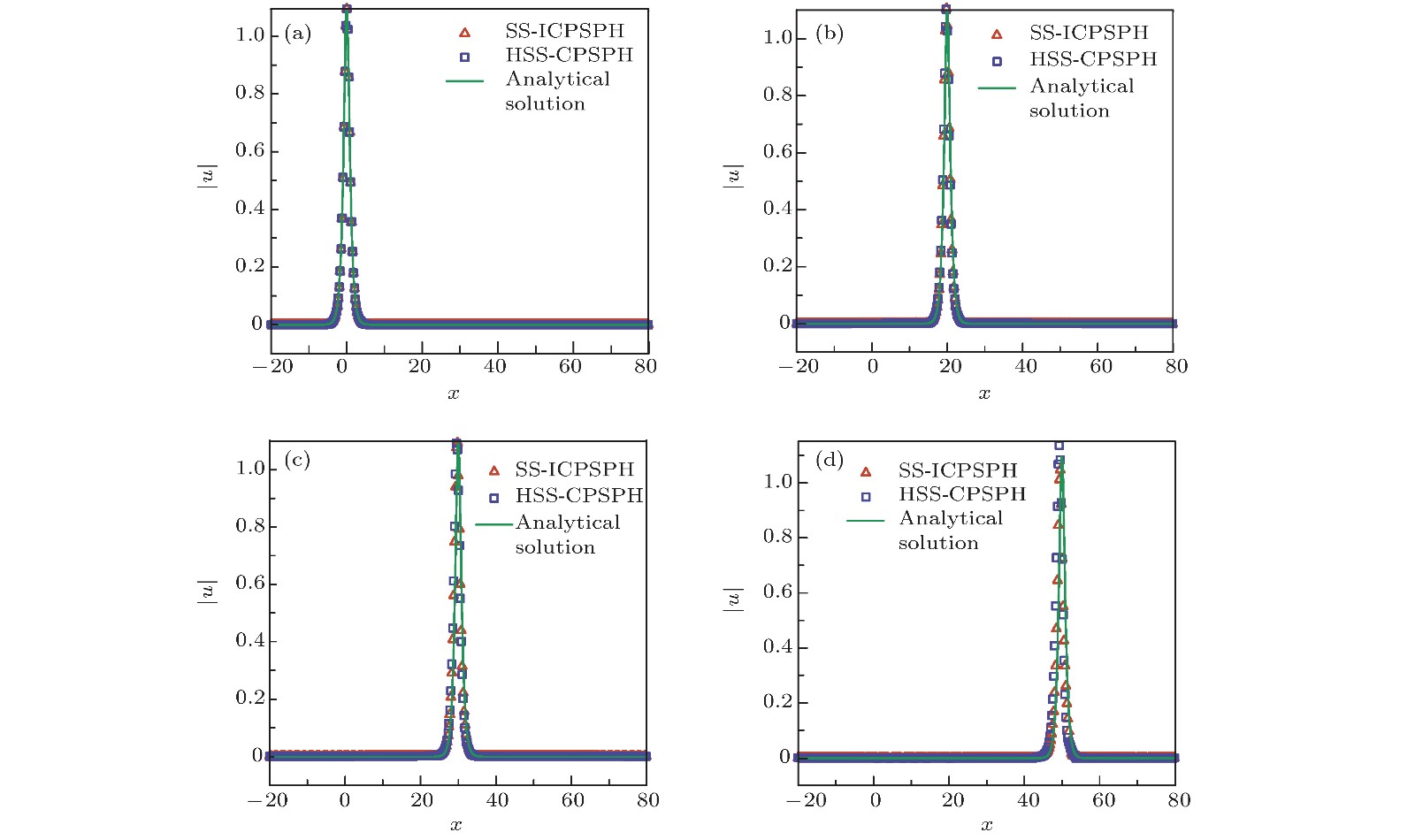
图 3 初始条件1下, 在4个不同时刻孤立波函数
$\left| u \right|$ 的传播过程 (a)$t = 0$ ; (b)$t = 20$ ; (c)$t = 30$ ; (d)$t = 50$ Fig. 3. Solitary wave propagation process of
$\left| u \right|$ at different time with the initial condition 1: (a)$t = 0$ ; (b)$t = 20$ ; (c)$t = 30$ ; (d)$t = 50$ .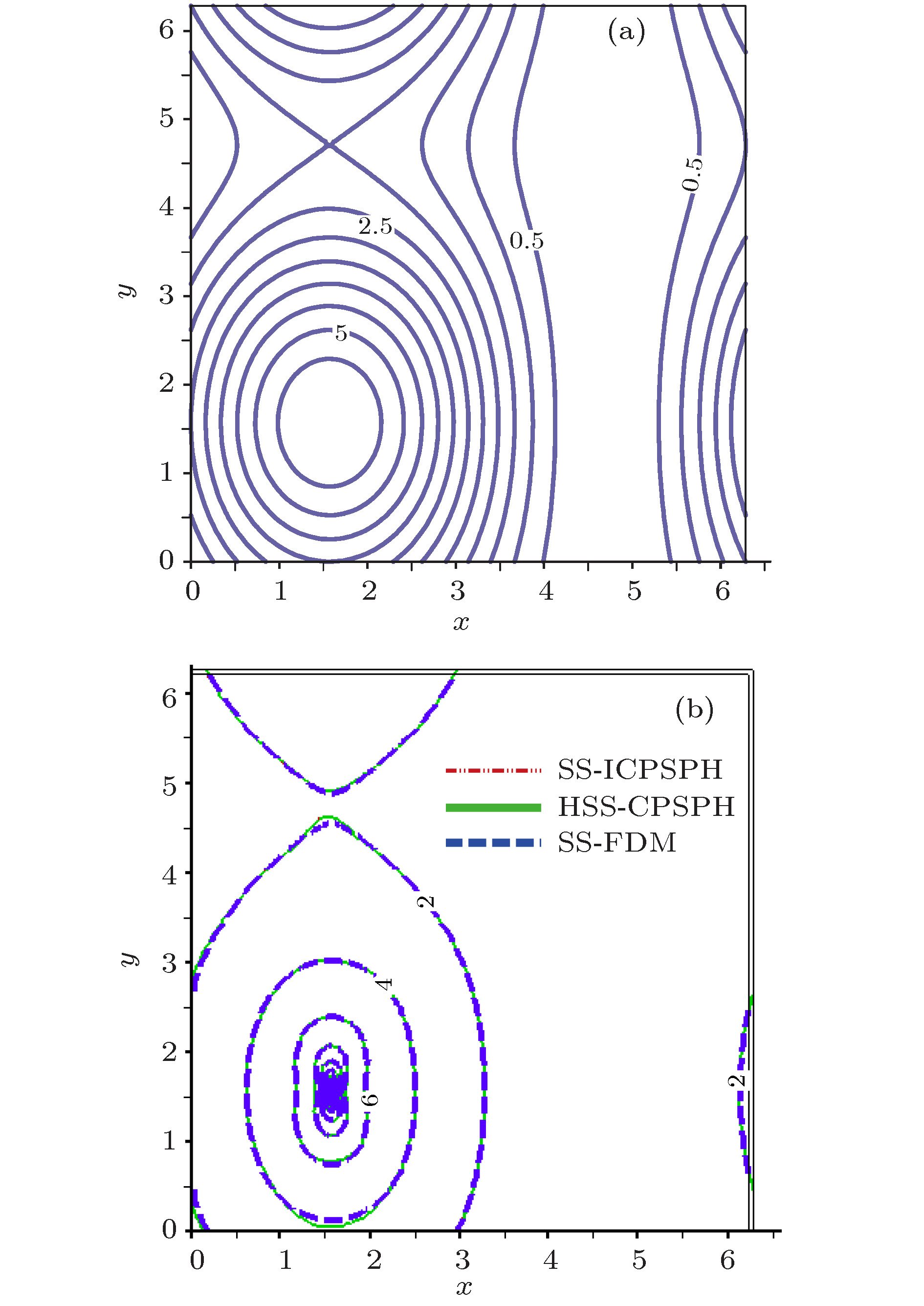
图 5 在两个不同时刻不同数值方法得到的
$\left| u \right|$ 等值线图 (a)$t = 0$ ; (b)$t = 0.108$ Fig. 5. Contours of
$\left| u \right|$ obtained using different methods at two different times: (a)$t = 0$ ; (b)$t = 0.108$ .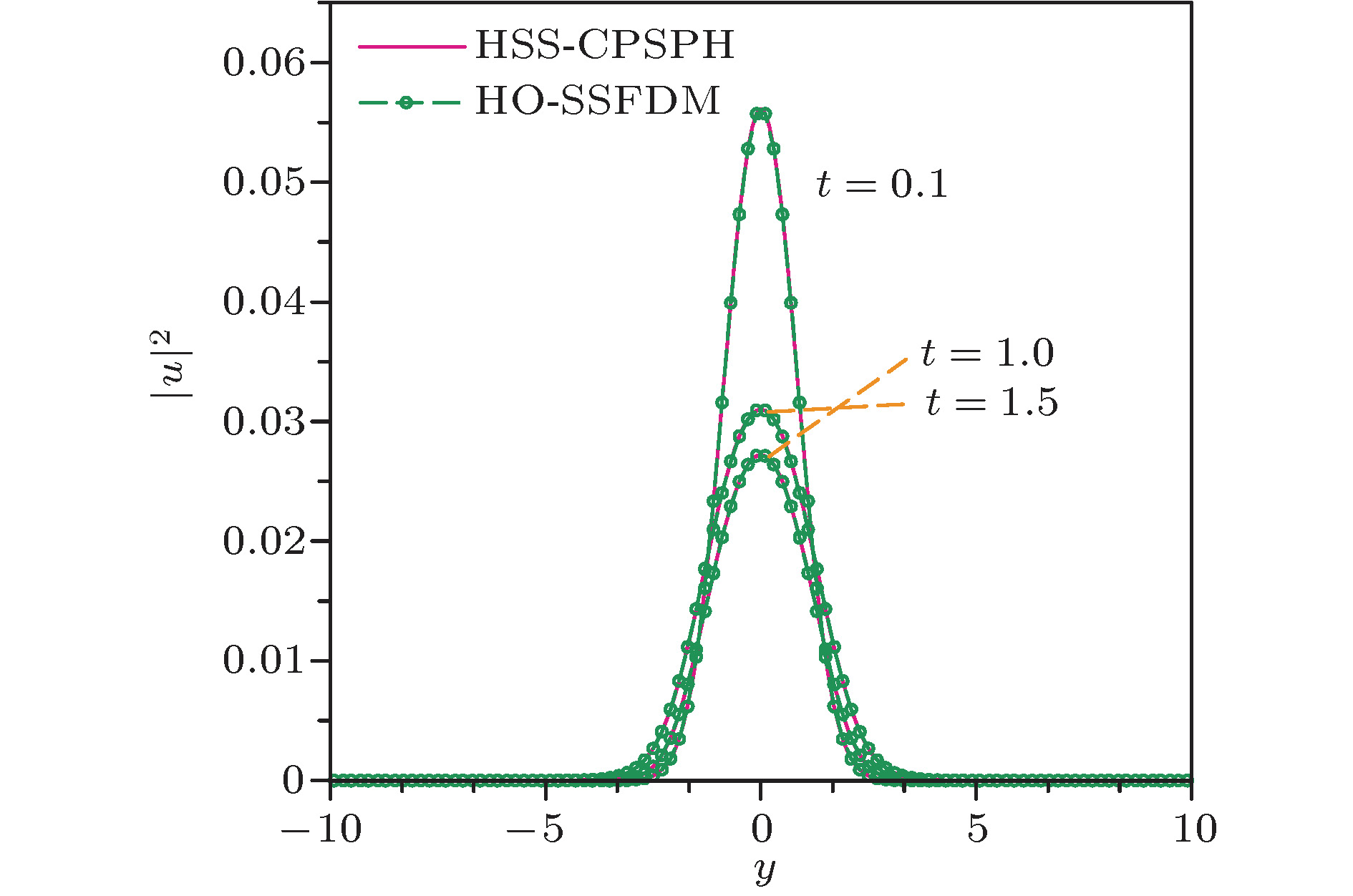
图 6 不同时刻
${\left| u \right|^2}$ 沿y轴$\left( {x = 0,z = 0} \right)$ 变化曲线Fig. 6. Curve of
${\left| u \right|^2}$ along y-axis$\left( {x = 0,z = 0} \right)$ at different time.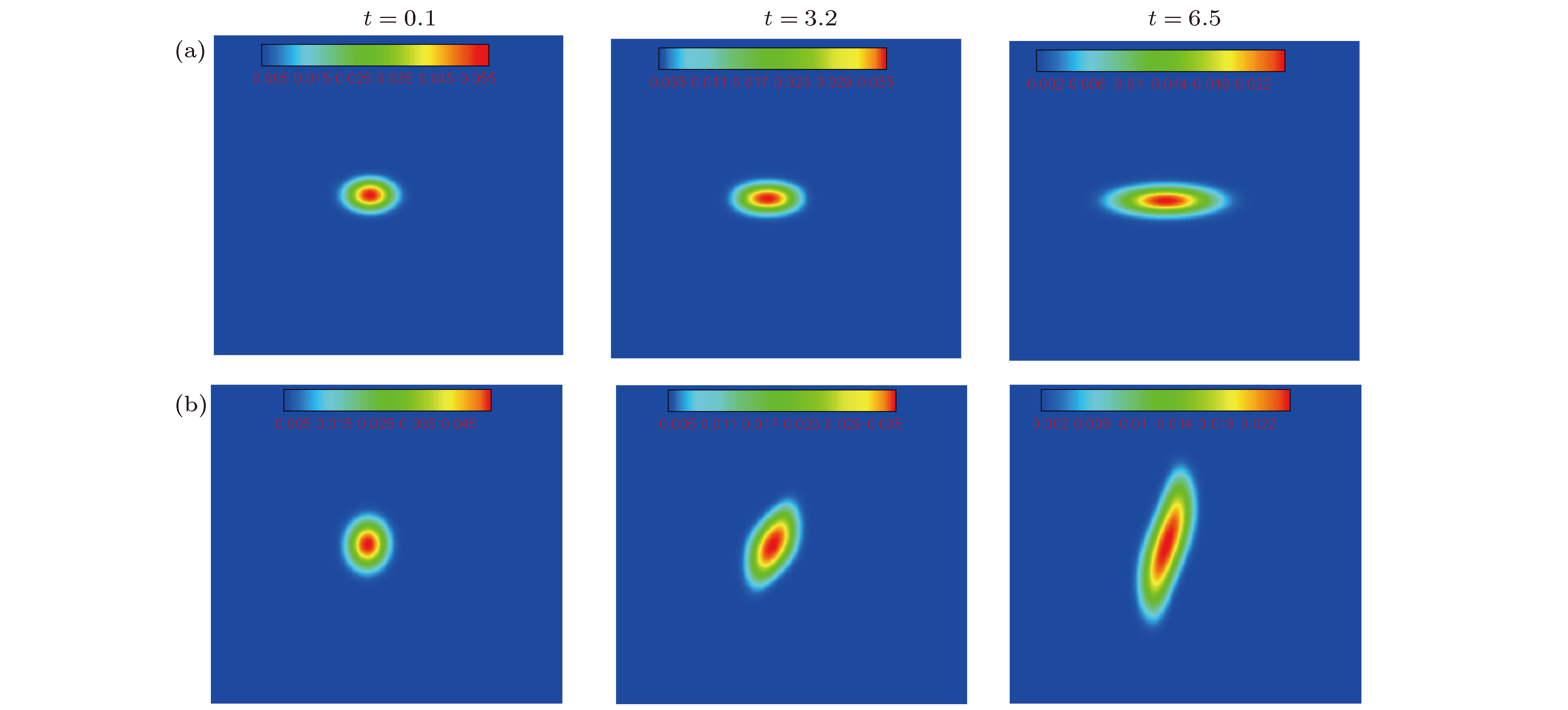
图 7 在3个不同时刻
${\left| u \right|^2}$ 在不同截面上的等值线 (a)$\left( {0,y,z} \right)$ 截面; (b)$\left( {x,y,0} \right)$ 截面Fig. 7. Contour of
${\left| u \right|^2}$ along different profile at different time: (a)$\left( {0,y,z} \right)$ ; (b)$\left( {x,y,0} \right)$ .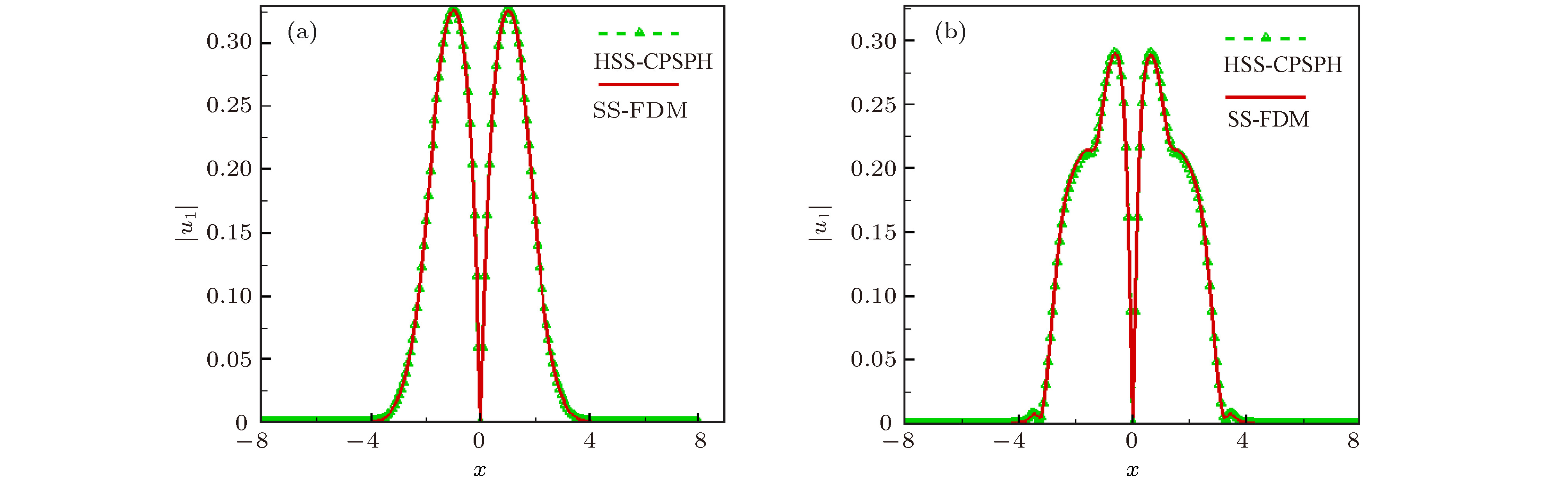
图 8 两个不同时刻下
$\left| {{u_1}} \right|$ 沿$x$ 轴($y$ = 0.5)的变化 (a)$t$ = 0.05; (b)$t$ = 0.25Fig. 8. Curve of
$\left| {{u_1}} \right|$ along x-axis ($y$ = 0.5) at two different time: (a)$t$ = 0.05; (b)$t$ = 0.25.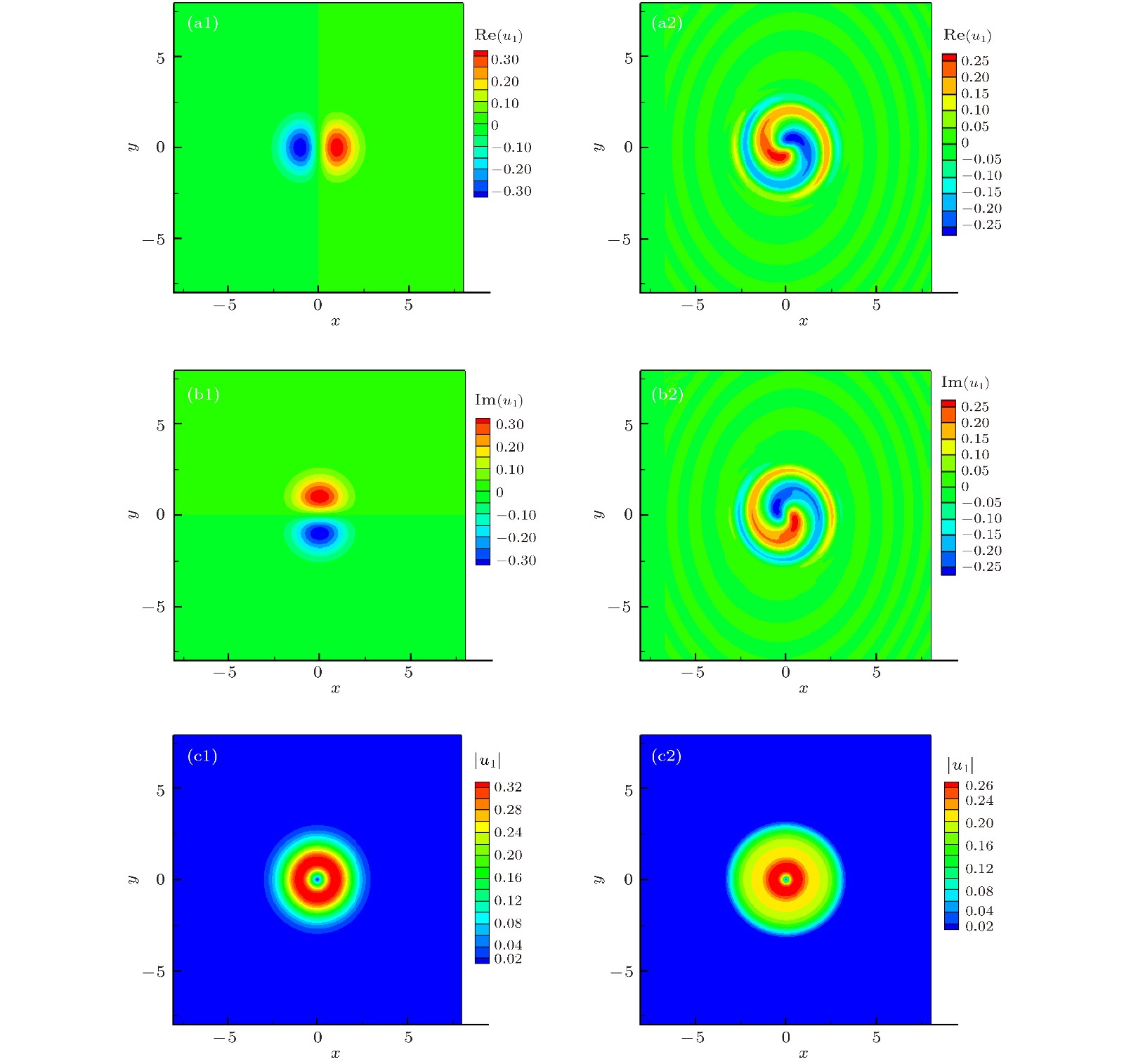
图 9 两个不同时刻下t = 0 (第一列)和t = 0.25 (第二列)三个物理量等值线变化 (a1), (a2)
$ {\rm Re} ({u_1}) $ ; (b1), (b2)${\rm Im} ({u_1})$ ; (c1), (c2)$\left| {{u_1}} \right|$ Fig. 9. Contours of three physical quantities at two different times t = 0 (the first row) and t = 0.25 (the second row): (a1), (a2)
$\operatorname{Re} ({u_1})$ ; (b1), (b2)$\operatorname{Im} ({u_1})$ ; (c1), (c2)$\left| {{u_1}} \right|$ .表 1
${k_{\rm{1}}} = {k_{\rm{2}}} = 1,h = {\text{π}}/64$ 时几个不同时刻里两种方法的误差${e_{\rm{m}}}$ Table 1. Error
${e_{\rm{m}}}$ obtained using two different methods at different time (${k_{\rm{1}}} = {k_{\rm{2}}} = 1,h = {\text{π}}/64$ ).时间t SS-ICPSPH HSS-CPSPH 0.5 1.697 × 10–3 1.696 × 10–3 1 3.616 × 10–3 2.494 × 10–3 2 7.347 × 10–3 4.857 × 10–3  下载: 导出CSV
下载: 导出CSV
表 2
${k_{\rm{1}}} = {k_{\rm{2}}} = 1$ , 时间t = 1时, 两种方法在不同粒子间距下的误差和收敛阶Table 2. Error
${e_{\rm{m}}}$ and convergent order$o{r_{\rm{\alpha }}}$ obtained using two different methods at$t=1$ and different particle distance (${k_1} = {k_2} = 1$ ).$h = {\text{π}}/32$ $h = {\text{π}}/64$ $h = {\text{π}}/128$ ${e_{\rm{m}}}$ $o{r_{\rm{\alpha }}}$ ${e_{\rm{m}}}$ $o{r_{\rm{\alpha }}}$ ${e_{\rm{m}}}$ $o{r_{\rm{\alpha }}}$ SS-ICPSPH 1.381 × 10–2 — 3.616 × 10–3 1.933 9.0412 × 10–4 2.00 HSS-CPSPH 1.381 × 10–2 — 2.494 × 10–3 2.47 4.498 × 10–4 2.47
下载: 导出CSV
表 3
${k_{\rm{1}}} = {k_{\rm{2}}} = 1,h = {\text{π}}/64$ 时, 粒子分布均匀或不均匀方式下, 两种方法的误差${e_{\rm{m}}}$ Table 3. Error
${e_{\rm{m}}}$ obtained using different methods at different distribution (${k_1} = {k_2} = 1$ ,$h = {\text{π}}/64$ ).均匀分布粒子 非均匀分布情形1 非均匀分布情形2 $t = 0.1$ $t = 1$ $t = 0.1$ $t = 1$ $t = 0.1$ $t = 1$ SS-ICPSPH 2.776 × 10–4 3.616 × 10–3 2.944 × 10–4 3.818 × 10–3 3.116 × 10–4 4.082 × 10–3 HSS-CPSPH 2.774 × 10–4 2.494 × 10–3 2.886 × 10–4 2.527 × 10–3 2.967 × 10–4 2.578 × 10–3
下载: 导出CSV
表 4
$h = {\text{π}}/64$ 时, 三个不同时刻两种方法的最大误差${e_{\rm{m}}}$ Table 4. Error
${e_{\rm{m}}}$ obtained using two different methods at three times ($h = {\text{π}}/64$ ).时间t SS-ICPSPH HSS-CPSPH 0.5 9.131 × 10–4 4.512 × 10–4 1 1.828 × 10–3 8.135 × 10–4 2 3.658 × 10–3 1.623 × 10–3
下载: 导出CSV
表 5 t = 1时不同空间步长情况下两种粒子方法的误差和收敛阶
Table 5. Error and order of convergence by different methods at t = 1 and different h.
$h = {\text{π}}/32$ $h = {\text{π}}/64$ $h = {\text{π}}/128$ ${e_{\rm{m}}}$ $o{r_{\rm{\alpha }}}$ ${e_{\rm{m}}}$ $o{r_{\rm{\alpha }}}$ ${e_{\rm{m}}}$ $o{r_{\rm{\alpha }}}$ SS-ICPSPH 7.553 × 10–3 — 1.828 × 10–3 2.046 4.316 × 10–4 2.082 HSS-CPSPH 4.534 × 10–3 — 8.135 × 10–4 2.476 1.379 × 10–4 2.560
下载: 导出CSV
表 6 粒子数为
${161^3}$ 时, 不同CPU个数下运行到不同步数所需时间(单位: s)Table 6. Consumed CPU time (unit: s) of different calculated time step with particle number
${161^3}$ at different CPUs.CPU数量 步数 相对加速比S num = 1 num = 10 num = 1000 2 97805.9 107508 1174728 — 12 16716.9 18516.7 215526.7 — 24 8388.87 9404.37 120284.37 1.792 36 5603.29 6344.98 87524.98 2.462 72 2948.83 3189.24 48564.28 4.438
下载: 导出CSV
表 7 在不同粒子数下不同CPU个数下, 运行到1000步时平均每步所消耗时间(单位: s)
Table 7. The average consumed CPU time (unit: s) of calculated time step 1000 with different particle number and different CPUs.
粒子数 CPU数量 2 12 24 36 72 ${121^3}$ 449.55 82.926 45.962 35.000 19.585 ${161^3}$ 1076.922 198.810 111.90 81.922 47.363 ${181^3}$ 1558.445 292.711 164.838 120.886 65.437 ${201^3}$ 2190.921 425.688 235.775 179.856 96.836
下载: 导出CSV
-
[1] Bandrauk A D, Shen H 1994 J. Phys. A: Gen. Phys. 27 7147
Google Scholar
[2] Yoshida H 1990 Phys. Lett. A 150 262
Google Scholar
[3] Wang T C, Guo B L, Xu Q B 2013 J. Comput. Phys. 243 382
Google Scholar
[4] Cheng R J, Cheng Y M 2016 Chin. Phys. B 25 020203
Google Scholar
[5] Wang D S, Xue Y S, Zhang Z F 2016 Rom. J. Phys. 61 827
[6] Bao W Z, Wang H Q 2006 J. Comput. Phys. 217 612
Google Scholar
[7] Bao W Z, Shen J 2005 SIAM J. Sci. Comput. 26 2010
Google Scholar
[8] Wang H Q 2005 Appl. Math. Comput. 170 17
Google Scholar
[9] Chen R Y, Nie L R, Chen C Y 2018 Chaos 28 053115
Google Scholar
[10] Chen RY, Nie L R, Chen C Y, Wang C J 2017 J. Stat. Mech. 2017 013201
Google Scholar
[11] Chen R Y, Pan W L, Zhang J Q, Nie L R 2016 Chaos 26 093113
Google Scholar
[12] Chen R Y, Tong L M, Nie L R , Wang C I, Pan W 2017 Physica A 468 532
Google Scholar
[13] Gao Y L, Mei L Q 2016 Appl. Numer. Math. 109 41
Google Scholar
[14] Xu Y, Shu C W 2005 J. Comput. Phys. 205 72−97
Google Scholar
[15] Jiang T, Chen Z C, Lu W G, Yuan J Y, Wang D S 2018 Comput. Phys. Commun. 231 19
Google Scholar
[16] Liu M B, Liu G R 2010 Arch. Comput. Meth. Eng. 17 25
Google Scholar
[17] 蒋涛, 陈振超, 任金莲, 李刚 2017 物理学报 66 130201
Google Scholar
Jiang T, Chen Z C, Ren J L, Li G 2017 Acta Phys. Sin. 66 130201
Google Scholar
[18] Chen J K, Beraun J E 2000 Comput. Meth. Appl. Mech. Eng. 190 225
Google Scholar
[19] Liu G R, Liu M B 2003 Smoothed Particle Hydrodynamics: A Mesh-free Particle Method (Singapore: World Scientific)
[20] Crespo A J C, Domínguez J M, Rogers B D, Gómez-Gesteira M, Longshaw S, Canelas R, Vacondio R, Barreiro A, García-Feal O 2015 Comput. Phys. Commun. 187 204
Google Scholar
[21] Ren J L, Jiang T, Lu W G, Li G 2016 Comput. Phys. Commun. 205 87
Google Scholar
[22] 刘谋斌, 常建忠 2010 物理学报 59 3654
Google Scholar
Liu M B, Chang J Z 2010 Acta Phys. Sin. 59 3654
Google Scholar
[23] Sun P N, Colagrosso A, Marrone S, Zhang A M 2016 Comput. Meth. Appl. Mech. Eng. 305 849
Google Scholar
[24] Huang C, Lei J M, Liu M B, Peng X Y 2015 Int. J. Numer. Methods Fluids 78 691
Google Scholar
[25] Huang C, Zhang D H, Shi Y X, Si Y L, Huang B 2018 Int. J. Numer. Meth. Eng. 113 179
Google Scholar
[26] Weideman J A C, Herbst B M 1986 SIAM J. Numer. Anal. 23 485
Google Scholar









 下载:
下载:











































































计量
- 文章访问数: 14211
- PDF下载量: 145
- 被引次数: 0
