










-
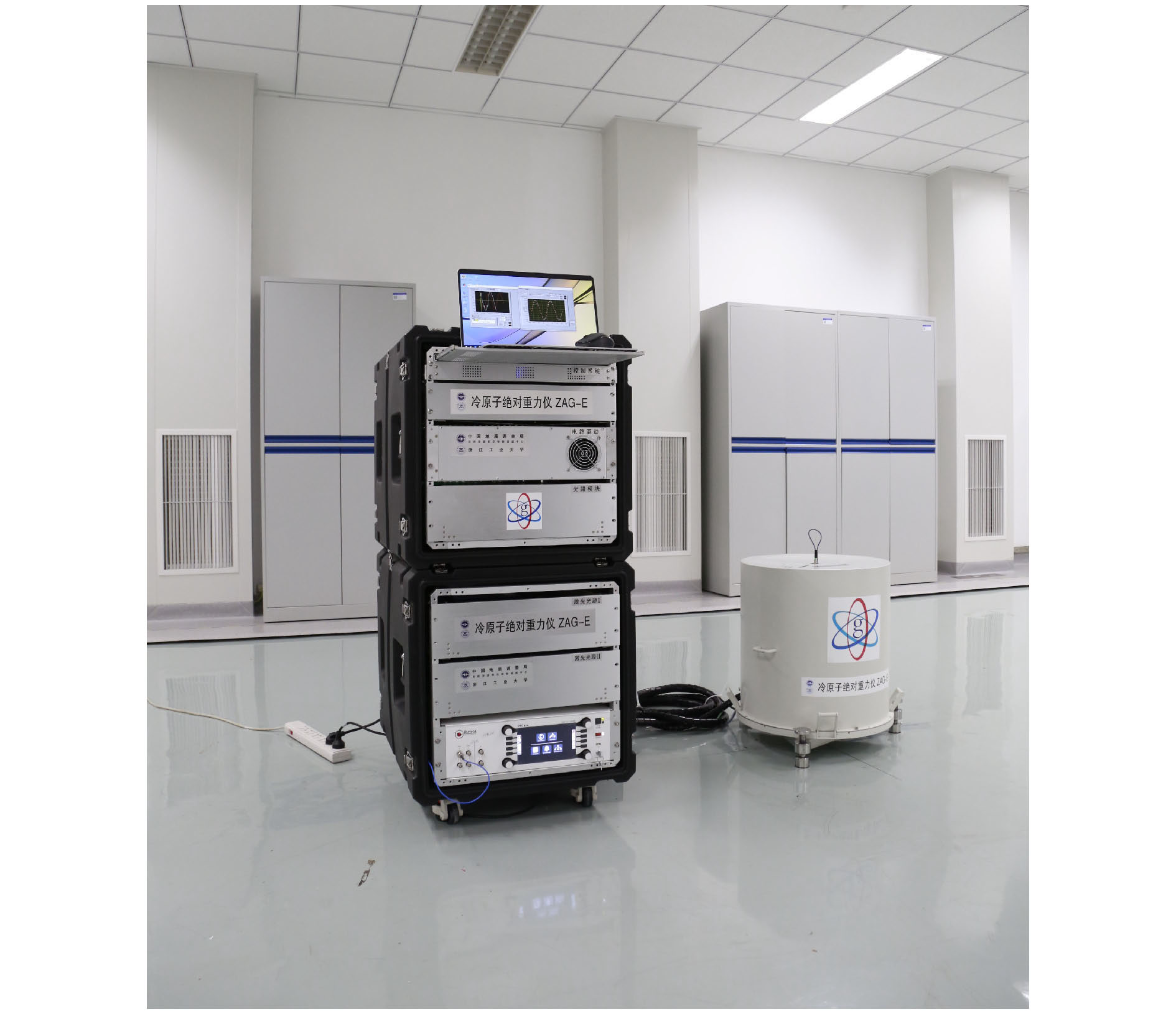
目前大多数原子重力仪的装置复杂、体积庞大、环境适应性差, 不能应用于野外进行绝对重力测量, 这限制了原子重力仪的应用领域. 本文利用自研的小型化原子重力仪, 集成了一套车载绝对重力测量系统. 该系统主要由原子重力仪、被动平台隔震系统、位姿平台调平系统、差分GPS测高系统、不间断电源供电系统及车载空调温控系统等组成. 首先, 本文对该测量系统的车载环境适应性进行了评估, 发现在野外40 ℃高温、8°大倾角普通路面的环境下, 该系统仍然能够正常工作; 其次, 介绍了车载绝对重力测量的实验步骤及数据处理方法, 并测量了车头朝向对绝对重力测量的影响. 最后, 在野外平坦路面上进行了重复测线工作, 评估了系统的内符合绝对重力测量精度, 结果约为30 μGal; 在野外大倾角山体路面, 通过测量不同海拔高度点的绝对重力值, 得到了地球的垂直重力梯度值, 约为–231(36) μGal/m. 本文结果为野外绝对重力勘测提供了依据.Currently, most of the experimental apparatuses of atomic gravimeters are complex in structure, large in size, and poor in environmental adaptability, so that they cannot be used to implement the absolute gravity measurement. Thus, the application areas of atomic gravimeter are greatly limited. In this paper, we integrate a system of absolute gravity measurement on a truck based on a compact homemade atomic gravimeter. This atomic gravimeter has a small size, light weight, low power consumption, and its accuracy is estimated as 10 μGal in the case of laboratory environment. This system consists of atomic gravimeter for gravity measurement, passive isolation platform for vibration suppression, posture platform for tilt adjustment, differential GPS for altitude measurement, UPS for power supply, air-conditioned truck for temperature control and transportation. At first, we estimate the performance of environmental adaptability for this measurement system on the truck, and it is found that this system can still work even at a high field temperature of 40 ℃ and a big tilt angle of 8° for the road. Besides, the experimental procedures of absolute gravity measurement and the methods of processing measured data are introduced. The Coriolis effect is analyzed and the dependence of measured gravity on the orientation of the truck has been measured. Finally, the repeated line measurements are performed on a flat field road. The accuracy of self-coincidence for absolute gravity measurement is evaluated to be 30 μGal and the difference in measured gravity among different locations is about 3080 μGal. Besides, we obtain the vertical gravity gradient of the earth by measuring the absolute gravity values at different altitude sites on a slope road, and the value is estimated to be -231(36) μGal/m. The presented results can provide the basic reference for the field absolute gravity survey.
-
Keywords:
- cold atom /
- atom interferometer /
- atomic gravimeter /
- absolute gravity measurement
[1] Bouchendira R, Clade P, Guellati-Khelifa S, Nez F, Biraben F 2011 Phys. Rev. Lett. 106 080801
 Google Scholar
Google Scholar
[2] Parker R H, Yu C, Zhong W, Estey B, Müller H 2018 Science 360 191
Google Scholar
[3] Rosi G, Sorrentino F, Cacciapuoti L, Prevedelli M, Tino G 2014 Nature 510 518
Google Scholar
[4] Dutta I, Savoie D, Fang B, Venon B, Alzar C L G, Geiger R, Landragin A 2016 Phys. Rev. Lett. 116 183003
Google Scholar
[5] Gustavson T L, Bouyer P, Kasevich M A 1997 Phys. Rev. Lett. 78 2046
Google Scholar
[6] McGuirk J M, Foster G T, Fixler J B, Snadden M J, Kasevich M A 2002 Phys. Rev. A 65 033608
Google Scholar
[7] Sorrentino F, Bodart Q, Cacciapuoti L, Lien Y H, Prevedelli M, Rosi G, Salvi L, Tino G M 2014 Phys. Rev. A 89 023607
Google Scholar
[8] Peters A, Chung K Y, Chu S 2001 Metrologia 38 25
Google Scholar
[9] Peters A, Chung K Y, Chu S 1999 Nature 400 849
Google Scholar
[10] Hu Z K, Sun B L, Duan X C, Zhou M K, Chen L L, Zhan S, Zhang Q Z, Luo J 2013 Phys. Rev. A 88 043610
Google Scholar
[11] Freier C, Hauth M, Schkolnik V, Leykauf B, Schilling M, Wziontek H, Scherneck H G, Muller J, Peters A 2016 J. Phys. Conf. Ser. 723 012050
Google Scholar
[12] Wu X J, Zi F, Dudley J, Bilotta R J, Canoza P, Muller H 2017 Optica 4 1545
Google Scholar
[13] Wu B, Wang Z Y, Cheng B, Wang Q Y, Xu A P, Lin Q 2014 Metrologia 51 452
Google Scholar
[14] Zhang X W, Zhong J Q, Tang B, Chen X, Zhu L, Huang P W, Wang J, Zhan M S 2018 Appl. Opt. 57 6545
Google Scholar
[15] Gillot P, Francis O, Landragin A, Dos Santos F P, Merlet S 2014 Metrologia 51 L15
Google Scholar
[16] Huang P W, Tang B, Chen X, Zhong J Q, Xiong Z Y, Zhou L, Wang J, Zhan M S 2019 Metrologia 56 045012
Google Scholar
[17] Fu Z J, Wang Q Y, Wang Z Y, Wu B, Cheng B, Lin Q 2019 Chin. Opt. Lett. 17 011204
Google Scholar
[18] Wang S K, Zhao Y, Zhuang W, Li T C, Wu S Q, Feng J Y, Li C J 2018 Metrologia 55 360
Google Scholar
[19] Menoret V, Vermeulen P, Le Moigne N, Bonvalot S, Bouyer P, Landragin A, Desruelle B 2018 Sci. Rep. 8 12300
Google Scholar
[20] Bidel Y, Zahzam N, Blanchard C, Bonnin A, Cadoret M, Bresson A, Rouxel D, Lequentrec-Lalancette M F 2018 Nat. Commun. 9 627
Google Scholar
[21] Fu Z J, Wu B, Cheng B, Zhou Y, Weng K X, Zhu D, Wang Z Y, Lin Q 2019 Metrologia 56 025001
Google Scholar
[22] Wu X J, Pagel Z, Malek B S, Nguyen T H, Zi F, Scheirer D S, Muller H 2019 Sci. Adv. 5 eaax0800
Google Scholar
[23] Mahadeswaraswamy C 2009 Ph. D. Dissertation (California: Stanford University)
[24] Geiger R, Ménoret V, Stern G, Zahzam N, Cheinet P, Battelier B, Villing A, Moron F, Lours M, Bidel Y, Bresson A, Landragin A, Bouyer P 2011 Nat. Commun. 2 474
Google Scholar
[25] Barrett B, Antoni-Micollier L, Chichet L, Battelier B, Lévèque T, Landragin A, Bouyer P 2016 Nat. Commun. 7 13786
[26] Becker D, Lachmann M D, Seidel S T, et al. 2018 Nature 562 391
Google Scholar
[27] Elliott E R, Krutzik M C, Williams J R, Thompson R J, Aveline D C 2018 NPJ Microgravity 4 7
Google Scholar
[28] Wu B, Zhu D, Cheng B, Wu L M, Wang K N, Wang Z Y, Shu Q, Li R, Wang H L, Wang X L, Lin Q 2019 Opt. Express 27 11252
Google Scholar
[29] 吴彬, 程冰, 付志杰, 朱栋, 周寅, 翁堪兴, 王肖隆, 林强 2018 物理学报 67 190302
Google Scholar
Wu B, Cheng B, Fu Z J, Zhu D, Zhou Y, Weng K X, Wang X L, Lin Q 2018 Acta Phys. Sin. 67 190302
Google Scholar
[30] Le Gouet J, Mehlstaubler T E, Kim J, Merlet S, Clairon A, Landragin A, Dos Santos F P 2008 Appl. Phys. B 92 133
Google Scholar
-
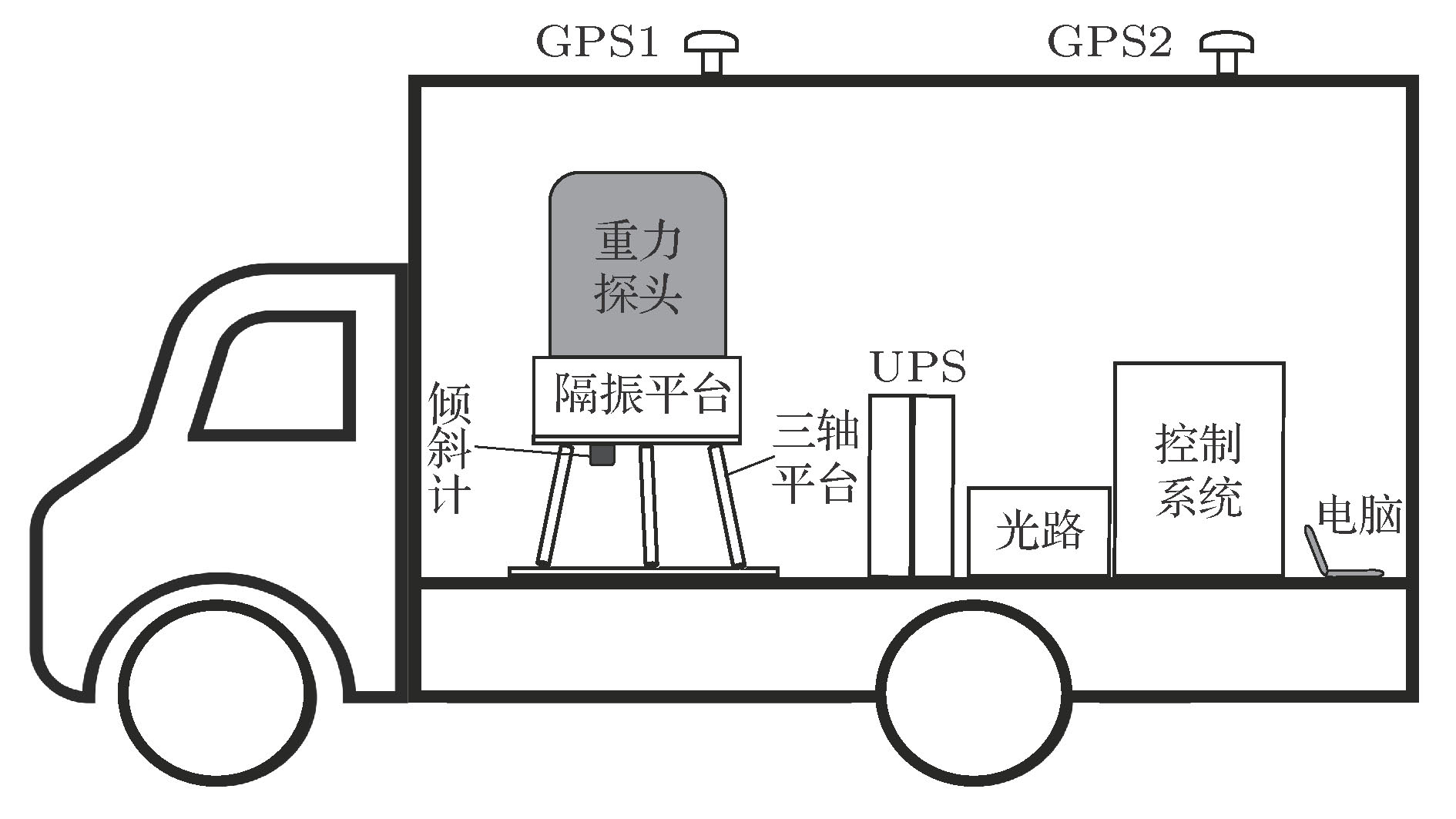
图 3 基于原子重力仪的车载绝对重力测量系统示意图
Fig. 3. Schematic diagram of the system of absolute gravity measurement on a truck based on atomic gravimeter.

图 4 野外车载绝对重力测量现场照片
Fig. 4. Photos of field measurement of absolute gravity on a truck.
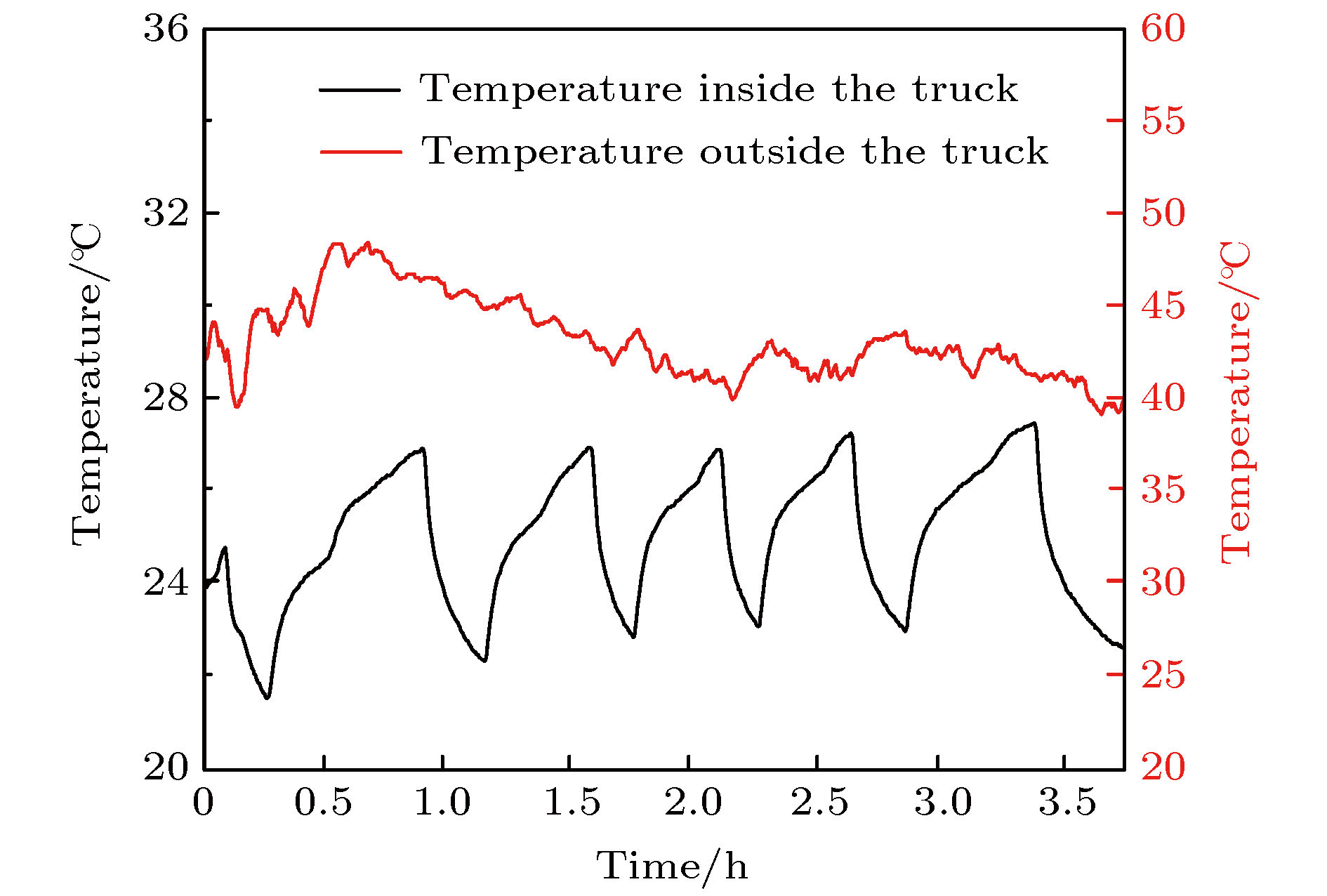
图 5 车厢内外部测量的温度变化曲线
Fig. 5. Curves of temperature changes measured inside and outside of the truck.

图 7 野外测量路线规划 (a)平坦路面; (b)大倾角路面
Fig. 7. Route planning of field gravity measurement: (a) Flat road; (b) slope road.
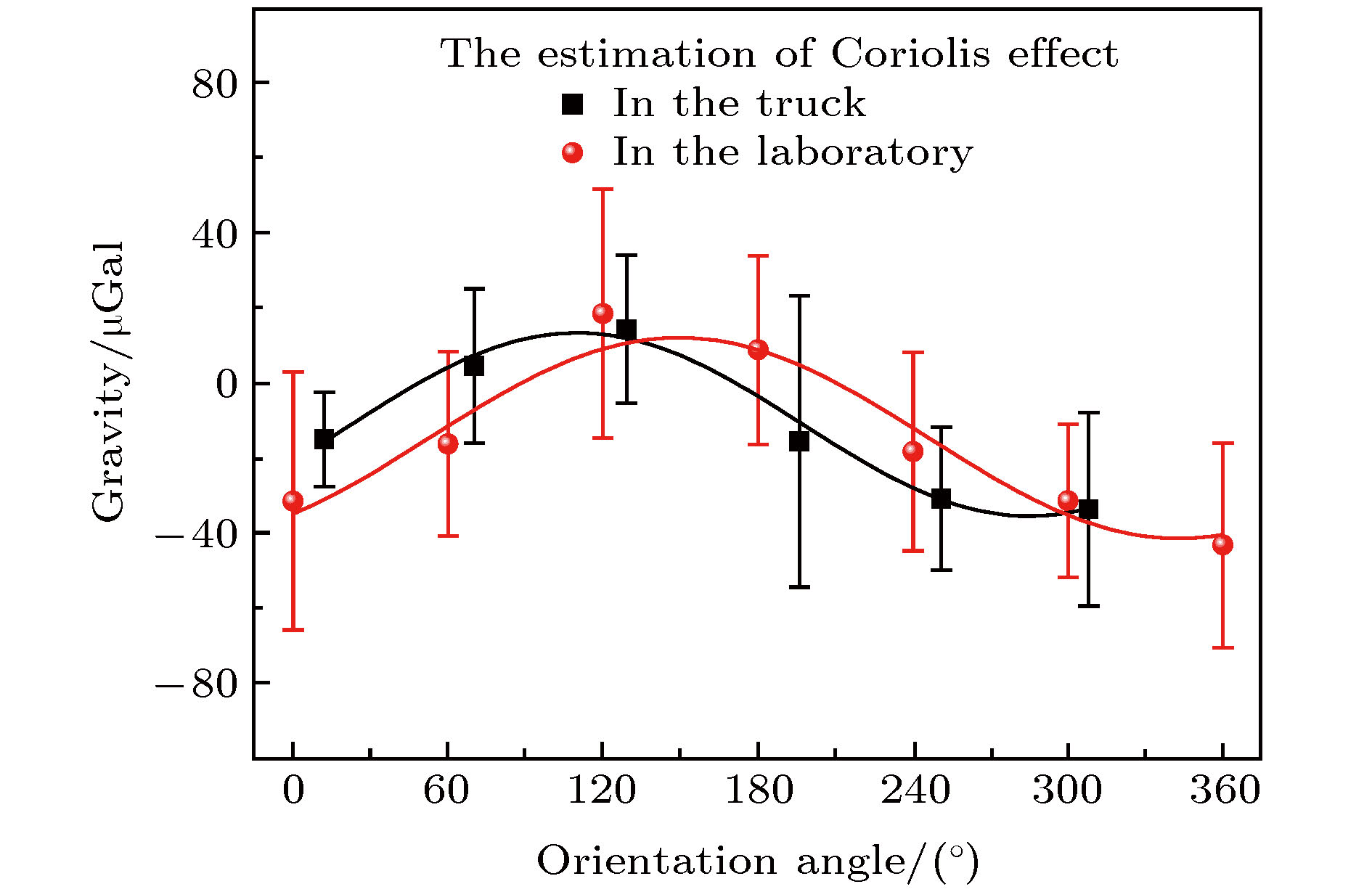
图 8 科里奥利效应的修正(红点, 实验室内的测量数据; 红线, 正弦拟合; 黑点, 车载情况下的测量数据; 黑线, 正弦拟合)
Fig. 8. Correction of Coriolis effect. Red and black dots represent the experimental data measured in the laboratory and the truck. Red and black lines are the corresponding sinusoidal fitted curves.
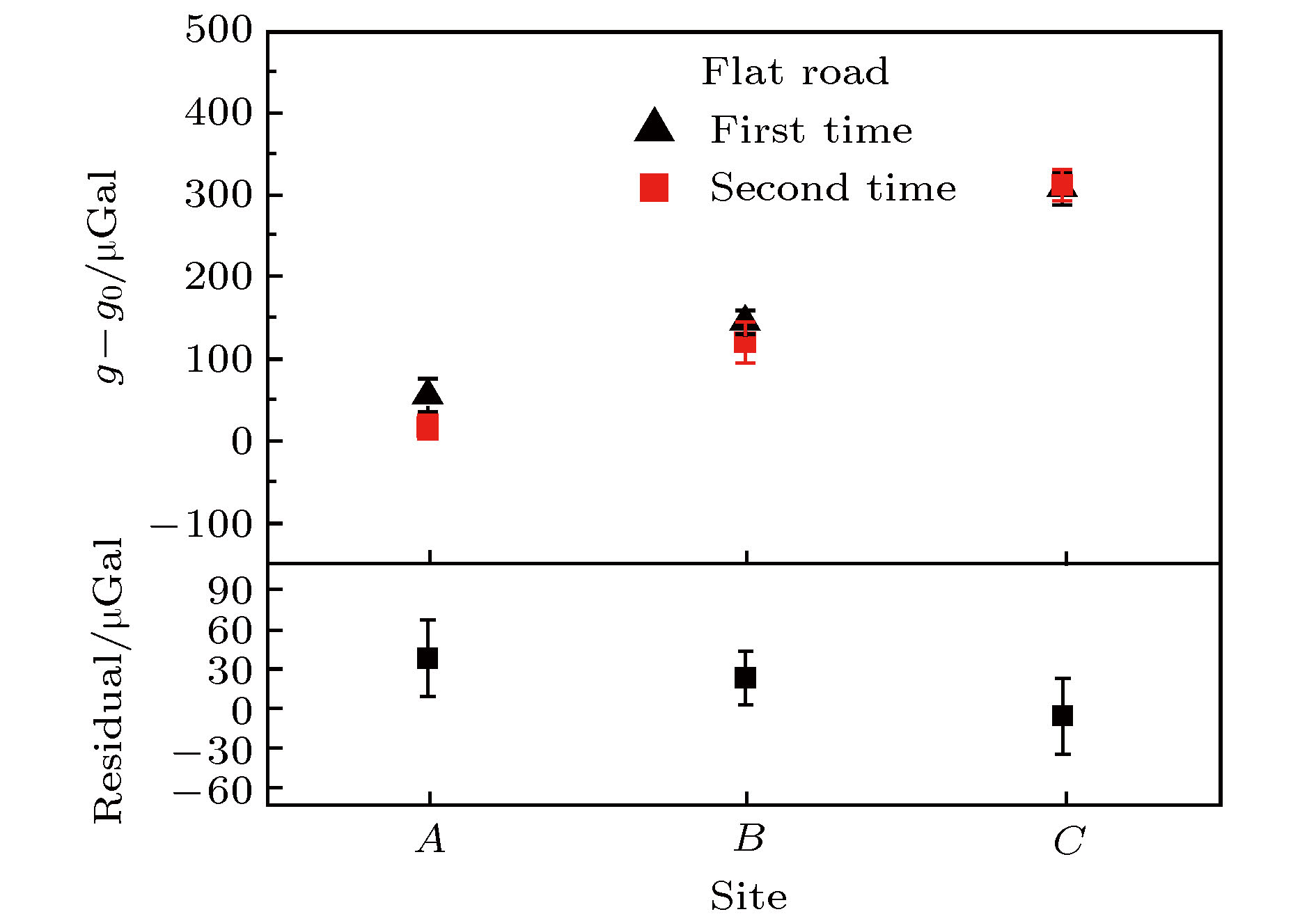
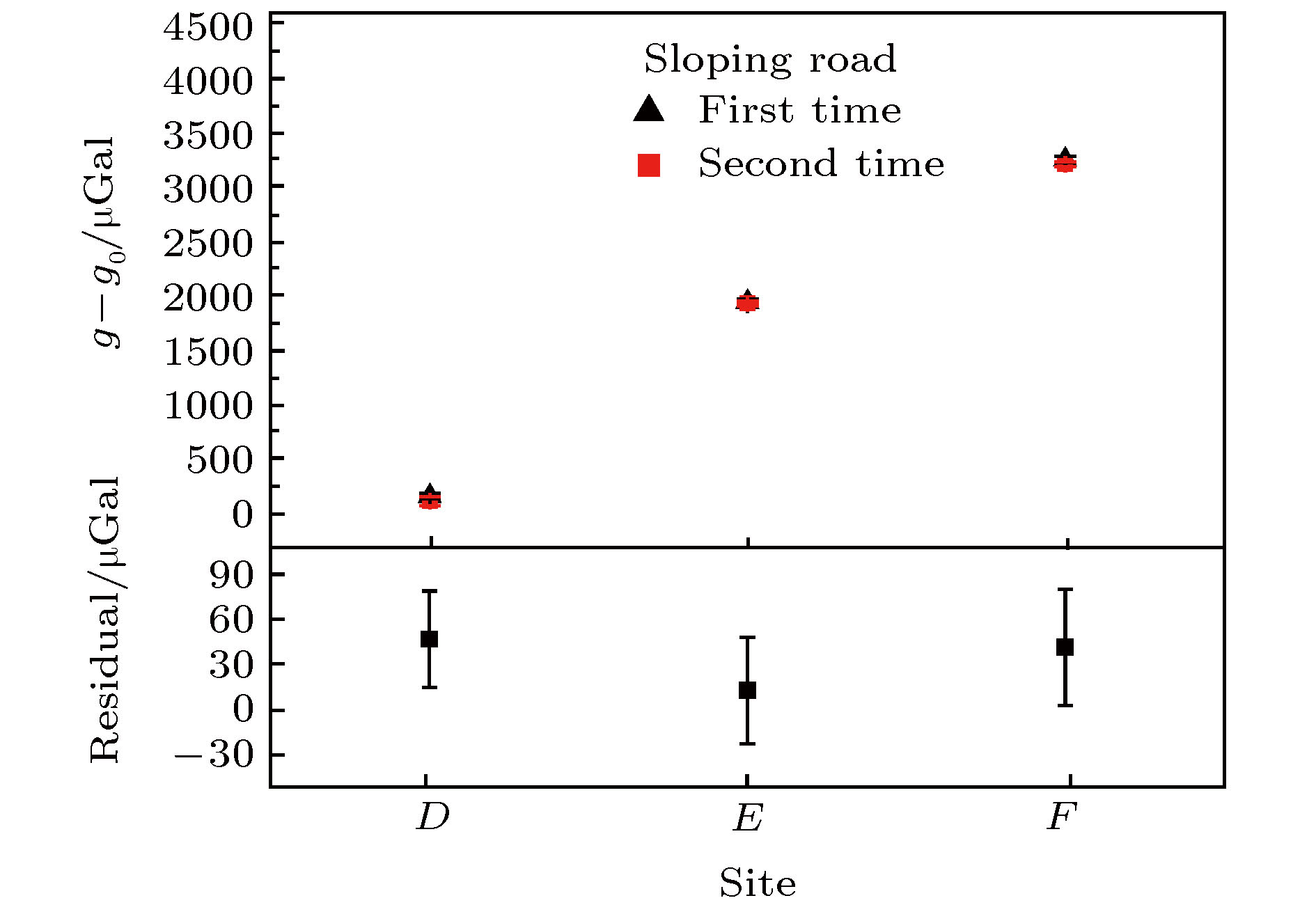
图 9 平坦路面情况下的绝对重力测量结果
Fig. 9. Measured resultes of absolute gravity in the case of flat road.
-
[1] Bouchendira R, Clade P, Guellati-Khelifa S, Nez F, Biraben F 2011 Phys. Rev. Lett. 106 080801
Google Scholar
[2] Parker R H, Yu C, Zhong W, Estey B, Müller H 2018 Science 360 191
Google Scholar
[3] Rosi G, Sorrentino F, Cacciapuoti L, Prevedelli M, Tino G 2014 Nature 510 518
Google Scholar
[4] Dutta I, Savoie D, Fang B, Venon B, Alzar C L G, Geiger R, Landragin A 2016 Phys. Rev. Lett. 116 183003
Google Scholar
[5] Gustavson T L, Bouyer P, Kasevich M A 1997 Phys. Rev. Lett. 78 2046
Google Scholar
[6] McGuirk J M, Foster G T, Fixler J B, Snadden M J, Kasevich M A 2002 Phys. Rev. A 65 033608
Google Scholar
[7] Sorrentino F, Bodart Q, Cacciapuoti L, Lien Y H, Prevedelli M, Rosi G, Salvi L, Tino G M 2014 Phys. Rev. A 89 023607
Google Scholar
[8] Peters A, Chung K Y, Chu S 2001 Metrologia 38 25
Google Scholar
[9] Peters A, Chung K Y, Chu S 1999 Nature 400 849
Google Scholar
[10] Hu Z K, Sun B L, Duan X C, Zhou M K, Chen L L, Zhan S, Zhang Q Z, Luo J 2013 Phys. Rev. A 88 043610
Google Scholar
[11] Freier C, Hauth M, Schkolnik V, Leykauf B, Schilling M, Wziontek H, Scherneck H G, Muller J, Peters A 2016 J. Phys. Conf. Ser. 723 012050
Google Scholar
[12] Wu X J, Zi F, Dudley J, Bilotta R J, Canoza P, Muller H 2017 Optica 4 1545
Google Scholar
[13] Wu B, Wang Z Y, Cheng B, Wang Q Y, Xu A P, Lin Q 2014 Metrologia 51 452
Google Scholar
[14] Zhang X W, Zhong J Q, Tang B, Chen X, Zhu L, Huang P W, Wang J, Zhan M S 2018 Appl. Opt. 57 6545
Google Scholar
[15] Gillot P, Francis O, Landragin A, Dos Santos F P, Merlet S 2014 Metrologia 51 L15
Google Scholar
[16] Huang P W, Tang B, Chen X, Zhong J Q, Xiong Z Y, Zhou L, Wang J, Zhan M S 2019 Metrologia 56 045012
Google Scholar
[17] Fu Z J, Wang Q Y, Wang Z Y, Wu B, Cheng B, Lin Q 2019 Chin. Opt. Lett. 17 011204
Google Scholar
[18] Wang S K, Zhao Y, Zhuang W, Li T C, Wu S Q, Feng J Y, Li C J 2018 Metrologia 55 360
Google Scholar
[19] Menoret V, Vermeulen P, Le Moigne N, Bonvalot S, Bouyer P, Landragin A, Desruelle B 2018 Sci. Rep. 8 12300
Google Scholar
[20] Bidel Y, Zahzam N, Blanchard C, Bonnin A, Cadoret M, Bresson A, Rouxel D, Lequentrec-Lalancette M F 2018 Nat. Commun. 9 627
Google Scholar
[21] Fu Z J, Wu B, Cheng B, Zhou Y, Weng K X, Zhu D, Wang Z Y, Lin Q 2019 Metrologia 56 025001
Google Scholar
[22] Wu X J, Pagel Z, Malek B S, Nguyen T H, Zi F, Scheirer D S, Muller H 2019 Sci. Adv. 5 eaax0800
Google Scholar
[23] Mahadeswaraswamy C 2009 Ph. D. Dissertation (California: Stanford University)
[24] Geiger R, Ménoret V, Stern G, Zahzam N, Cheinet P, Battelier B, Villing A, Moron F, Lours M, Bidel Y, Bresson A, Landragin A, Bouyer P 2011 Nat. Commun. 2 474
Google Scholar
[25] Barrett B, Antoni-Micollier L, Chichet L, Battelier B, Lévèque T, Landragin A, Bouyer P 2016 Nat. Commun. 7 13786
[26] Becker D, Lachmann M D, Seidel S T, et al. 2018 Nature 562 391
Google Scholar
[27] Elliott E R, Krutzik M C, Williams J R, Thompson R J, Aveline D C 2018 NPJ Microgravity 4 7
Google Scholar
[28] Wu B, Zhu D, Cheng B, Wu L M, Wang K N, Wang Z Y, Shu Q, Li R, Wang H L, Wang X L, Lin Q 2019 Opt. Express 27 11252
Google Scholar
[29] 吴彬, 程冰, 付志杰, 朱栋, 周寅, 翁堪兴, 王肖隆, 林强 2018 物理学报 67 190302
Google Scholar
Wu B, Cheng B, Fu Z J, Zhu D, Zhou Y, Weng K X, Wang X L, Lin Q 2018 Acta Phys. Sin. 67 190302
Google Scholar
[30] Le Gouet J, Mehlstaubler T E, Kim J, Merlet S, Clairon A, Landragin A, Dos Santos F P 2008 Appl. Phys. B 92 133
Google Scholar

 下载:
下载:
计量
- 文章访问数: 18021
- PDF下载量: 349
- 被引次数: 0
