










-
随着电力电子技术的进步和环境保护对清洁能源的要求, 以同步发电机为主的传统电力系统正向着多样化电力电子装备为主的电力系统转变, 由此电力系统正面临着百年来未有之大变局. 近年来, 国内外不断报道出以电力电子装备为主的新能源基地和传统高压直流等机理不明的电力事故, 严重威胁了电力系统安全稳定运行. 针对上述问题, 本文首先介绍传统电力系统暂态稳定分析的主要方法, 接着分析了典型故障场景下简单电力电子化电力系统的动力学行为, 并建立了同时包含电力电子设备与传统同步机的多机耦合系统模型, 最后总结了电力电子化电力系统的非线性、多时标、复杂性的本质特点, 归纳其暂态稳定的基本问题与挑战以及对未来研究方向的展望, 希望引起复杂系统和统计物理背景的研究人员的广泛兴趣.
-
关键词:
- 电力电子化电力系统动态 /
- 暂态稳定 /
- 并网功率变换器 /
- 复杂系统动态
With the development of power electronic technology and requirement for clean energy, the traditional power systems which are dominated by synchronous generators are gradually changing into the power-electronic-based power systems with diversified power electronic equipment. The power systems are facing a great revolution in their primary equipment, and this has not happened in the past one hundred years. In recent years, with great increasing penetration of power electronic devices into power grids, the large-scale blackouts caused by power electronic devices have been reported, which seriously threatens the safe and stable operation of power systems. Under the above background, in this paper we first introduce several methods of analyzing the traditional power system transient stability from the equal area criterion for the single machine infinite bus system to several Lyapunov function based direct methods for multi-machine systems. Then we introduce some of our recent work on the nonlinear modeling and analysis of a key component of power-electronic-based power systems, voltage source converter (VSC), and propose a multiple machine system model including power electronic equipment and traditional synchronous machines. Finally, we illustrate the transient characteristics of the power electronic devices, and summarize the basic problems and challenges for the transient stability of power-electronic-based power systems. We hope that these basic problems in power-electronic-based power system dynamics including nonlinearity, multi-time-scale, and complexity could arouse the general interest of researchers in the fields of complex systems and statistical mechanics.-
Keywords:
- power-electronic-based power system dynamics /
- transient stability analysis /
- grid-connected converter /
- complex system dynamics
[1] 周孝信, 陈树勇, 鲁宗相, 黄彦浩, 马士聪, 赵强 2018 电机工程学报 38 1893
 Google Scholar
Google Scholar
Zhou X X, Chen S Y, Lu Z X, Huang Y H, Ma S C 2018 Proceedings of the CSEE 38 1893
Google Scholar
[2] 袁小明, 程时杰, 胡家兵 2016 电机工程学报 36 5145
Google Scholar
Yuan X M, Cheng S J, Hu J B 2016 Proceedings of the CSEE 36 5145
Google Scholar
[3] 胡家兵, 袁小明, 程时杰 2019 电机工程学报 39 5457
Google Scholar
Hu J B, Yuan X M, Cheng S J 2019 Proceedings of the CSEE 39 5457
Google Scholar
[4] Biaabjerg F, Ma K 2013 IEEE J. Emerging Sel. Top. Power Electron. 1 139
Google Scholar
[5] Biaabjerg F, Teodorescu R, Liserre M, Timbus A V 2006 IEEE Trans. Ind. Electron. 53 1398
[6] National Grid ESO LFDD 09/08/2019 Incident Report https://www.nationalgrideso.com/document/152346/download [2019-11-10]
[7] Kundur P, Balu N J, Lauby M G 1994 Power System Stability and Control (Vol. 1) (New York: McGraw-hill) p827
[8] Anderson P M, Fouad A A 2002 Power System Control and Stability (Vol. 2) (Boloken: John Wiley & Sons) p13
[9] 傅书逷, 倪以信, 薛禹胜 1999 直接法稳定分析(北京: 中国电力出版社) 第25页
Fu S T, Ni Y Y, Xue Y S 1999 Direct Method Stability Analysis (Vol. 1) (Beijing: China Electric Power Press) p25 (in Chinese)
[10] 刘笙, 陈陈 2014 电力系统暂态稳定的能量函数分析: 网络结构保持模型(北京: 科学出版社) 第75页
Liu S, Chen C 2014 Energy Function Analysis of Power Aystem Transient Atability: Network Structure Maintenance Model (Vol. 1) (Beijing: Science Press) p75 (in Chinese)
[11] Chiang H D 2010 Direct Methods for Stability Analysis of Electric Power Systems (Vol. 1) (Beijing: Science Press) p60
[12] Kakimoto N, Ohsawa Y, Hayashi M 1978 Trans. IEE of Japan 98 62
[13] Llamas A, Lopez J, Mili L, Phadke A, Thorp J 1995 IEEE Trans. Power Syst 10 210
[14] Xue Y, Cutsem T V, Ribbens-Pavella V 1988 IEEE Trans. Power Syst. 3 400
Google Scholar
[15] Kalcon G O, Adam G P, Anaya-Lara O, Lo S, Uhlen K 2012 IEEE Trans. Power Syst. 27 1818
[16] Harnefors L, Bongiorno M, Lundberg S 2007 IEEE Trans. Ind. Electron. 54 3323
Google Scholar
[17] Sun J 2011 IEEE Trans. Power Electron. 26 3075
Google Scholar
[18] Rygg A, Molinas M, Zhang C, Cai X 2016 IEEE J. Emerging Sel. Top. Power Electron. 4 1383
Google Scholar
[19] Huang Y, Yuan X, Hu J, Zhou P 2015 IEEE J. Emerging Sel. Top. Power Electron. 3 1193
Google Scholar
[20] Yuan H, Yuan X, Hu J 2017 IEEE Trans. Power Syst. 32 3981
Google Scholar
[21] Yang Z, Mei C, Chen S, Zhan M 2020 IEEE J. Emerging Sel. Top. Power Electron. (in press)
Google Scholar
[22] Kabalan M, Singh P, Niebur D 2016 IEEE Trans. Smart Grid 8 2287
[23] Wu H, Wang X 2018 IEEE Trans. Ind. Electron. 66 6473
[24] Huang L, Xin H, Wang Z, Zhang L, Wu K, Hu J 2017 IEEE Trans. Smart Grid 10 578
[25] Huang M, Wong S C, Chi K T, Ruan X 2012 IEEE Trans. Circuits Syst. I, Reg. Papers 60 1062
[26] Huang M, Peng Y, Chi K T, Liu Y, Sun J, Zha X 2017 IEEE Trans. Power Electron. 32 8868
Google Scholar
[27] Zhang C, Cai X, Li Z, Rygg A, Molinas M 2017 IET Power Electron. 10 894
Google Scholar
[28] Sun J, Wang G, Du X, Wang H 2018 IEEE Trans. Power Electron. 34 3025
[29] Ying J, Yuan X X, Hu J B 2017 IEEE Trans. Energy Convers. 32 1502
Google Scholar
[30] Vittal E, O’Malley M, Keane A 2010 IEEE Trans. Power Syst. 25 433
[31] Gautam D, Vittal V, Harbour T 2009 IEEE Trans. Power Syst. 24 1426
[32] Hu Q, Fu L, Ma F, Ji F 2019 IEEE Trans. Power Syst. 34 3220
Google Scholar
[33] 李明节, 于钊, 许涛, 贺静波, 王超, 谢小荣, 刘纯 2017 电网技术 41 1035
Google Scholar
Li M J, Yu Z, Xu T, He J B, Wang C, Xie X X, Liu C 2017 Proceedings of the CSEE 41 1035
Google Scholar
[34] Menck P J, Heitzig J, Kurths J, Schellnhuber H J 2014 Nat.Commun. 5 3969
Google Scholar
[35] Schultz P, Heitzig J, Kurths J 2014 New J.Phys. 16 125001
Google Scholar
[36] Rohden M, Sorge A, Timme M, Witthaut D 2012 Phys. Rev. Lett. 109 064101
Google Scholar
[37] Schafer B, Witthaut D, Timme M, Latora V 2018 Nat. Commun. 9 1975
Google Scholar
[38] Motter A E, Myers S A, Anghel M, Nishikawa T 2013 Nat. Phys. 9 191
Google Scholar
[39] Yang Y, Nishikawa T, Motter A E 2017 Science 358 3184
Google Scholar
[40] Dorfler F, Chertkov M, Bullo F 2013 PNAS 110 2005
Google Scholar
[41] Grob D, Arghir C, Dorfler F 2018 Automatica 90 248
Google Scholar
[42] Carareto R, Baptista M S, Grebogi C 2013 Commun. Nonlinear Sci. Numer. Simul. 18 1035
Google Scholar
[43] Ma J, Sun Y, Yuan X, Kurths J, Zhan M 2016 PLoS ONE 11 e0165943
Google Scholar
[44] Sun Y, Kurths J, and Zhan M 2017 CHAOS 27 083116
Google Scholar
[45] Y Sun, J Ma, J Kurths, M Zhan 2018 Proc. R. Soc. London, Ser. A 474 20170733
Google Scholar
[46] M He, W He, J Hu, X Yuan, M Zhan 2019 Nonlinear Dynamics 95 1965
Google Scholar
[47] Q Yue, J Yu, Zhan M 2019 IET RPG 2019 International Conference on Renewable Power Generation Shanghai, China, October 24–25, 2019 p294
[48] Qiu Q, Ma R, Kurths J, Zhan M 2020 Chaos 30 013110
Google Scholar
[49] Yang Z Q, Ma R, Chen S, Zhan M 2020 IEEE J. Emerging. Sel. Top. Power Electron. (in press)
Google Scholar
[50] Ma R, Yang Z, Cheng S, Zhan M 2020 Sustained Oscillations and Bifurcations in Three-phase VSC Tied to AC Gird (submitted) IET Renewable Power Generation
[51] Strogatz S H 2018 Nonlinear Dynamics and Chaos: with Applications to Physics, Biology, Chemistry, and Engineering (Vol. 2) (Boulder: Westview Press) p241
[52] Kuehn C 2015 Multiple Time Scale Dynamics (Vol. 1) (Berlin: Springer International Publishing) p53
-
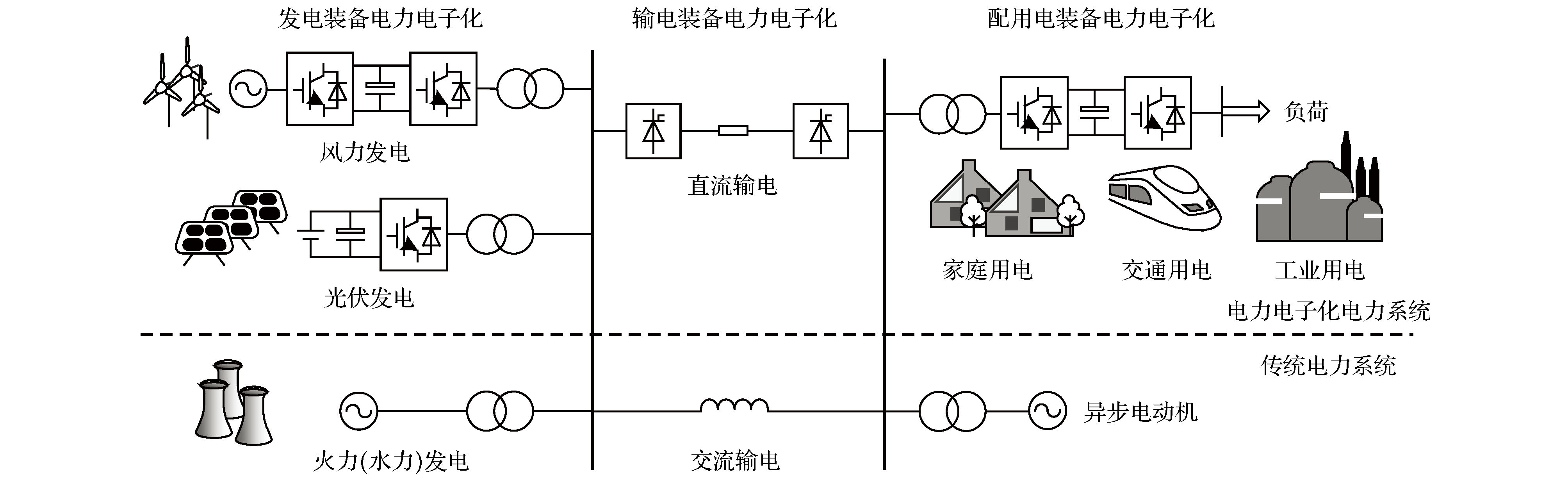
图 1 电力电子化电力系统示意图
Fig. 1. Schematic diagram of power electronic dominated power systems
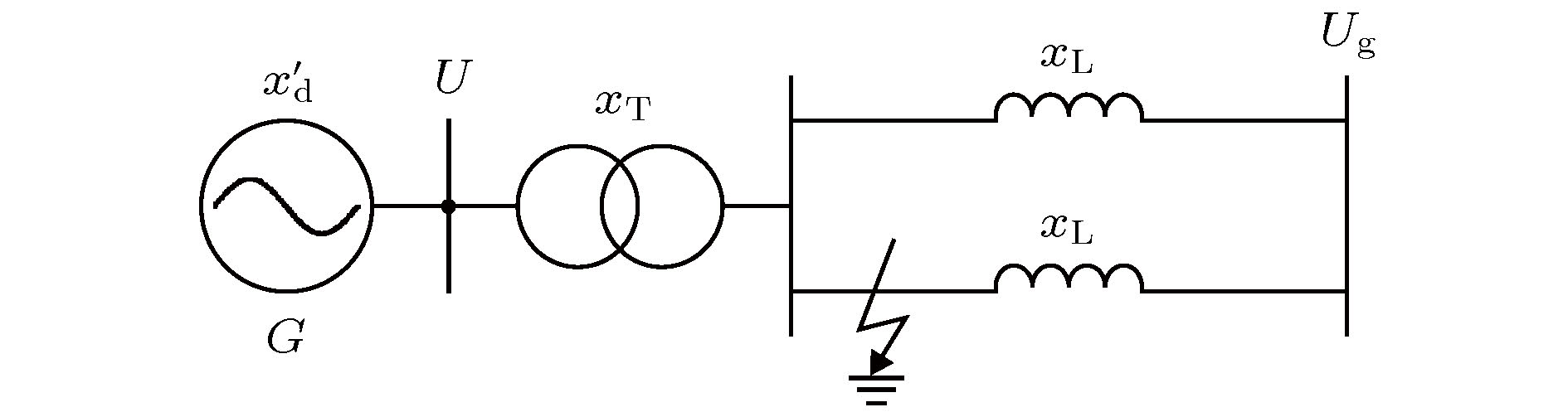
图 2 一台同步发电机经变压器升压后串联双回线路接入无穷大电网的示意图
Fig. 2. Schematic show for a single-machine-infinite-bus (SMIB) system
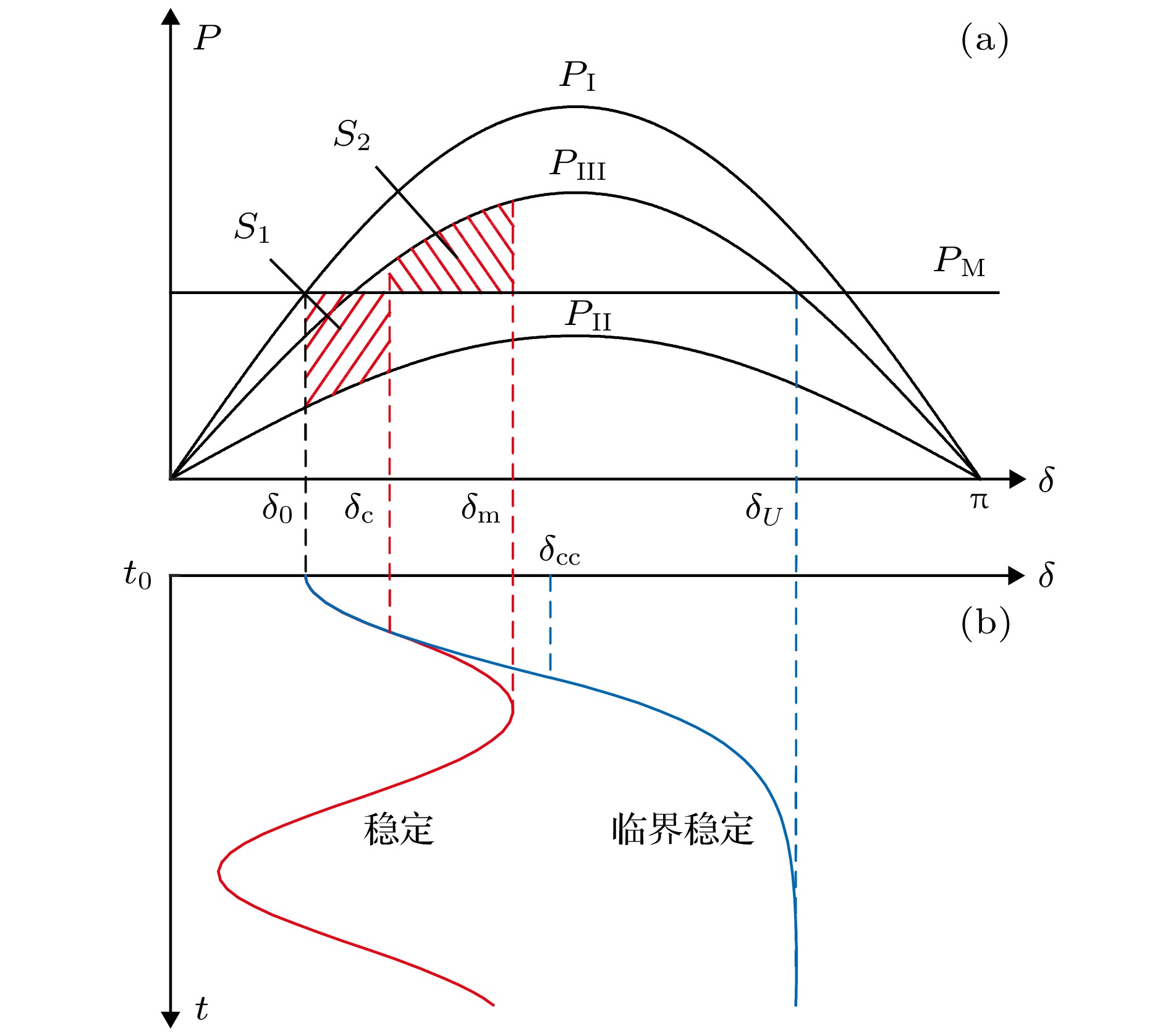
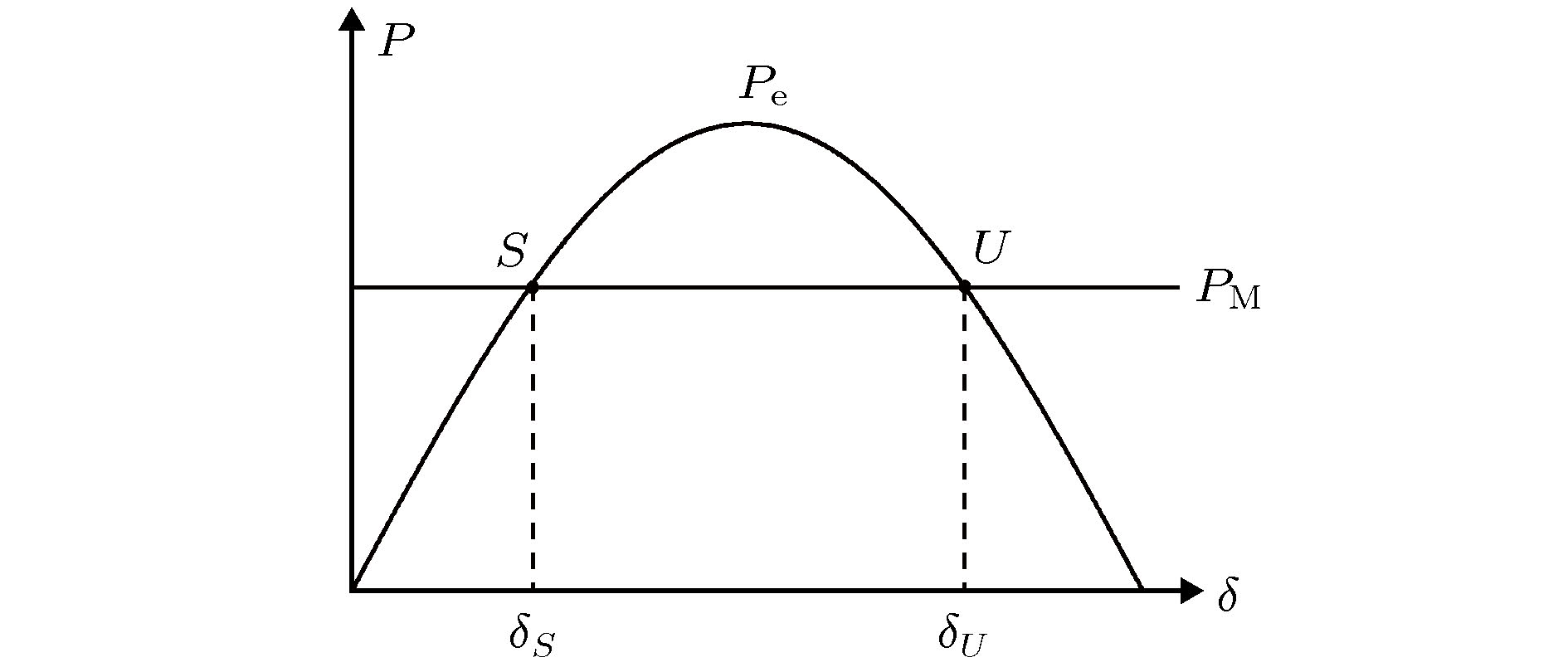
图 4 (a) 简单系统在故障前、故障中、故障后的三条不同功率特性曲线; (b) 暂态稳定(红色曲线)和临界稳定(蓝色曲线)情况下的功角的时域波形[9]
Fig. 4. (a) Power-angle relationships for three different states of before-fault (
$ P_{\rm {I}} $ ), during-fault ($ P_{\rm {II}} $ ), and post-fault ($ P_{\rm {III}} $ ); (b) time-domain responses of the power angle when the system are stable (red curve) and critical stable (blue curve), respectively[9]
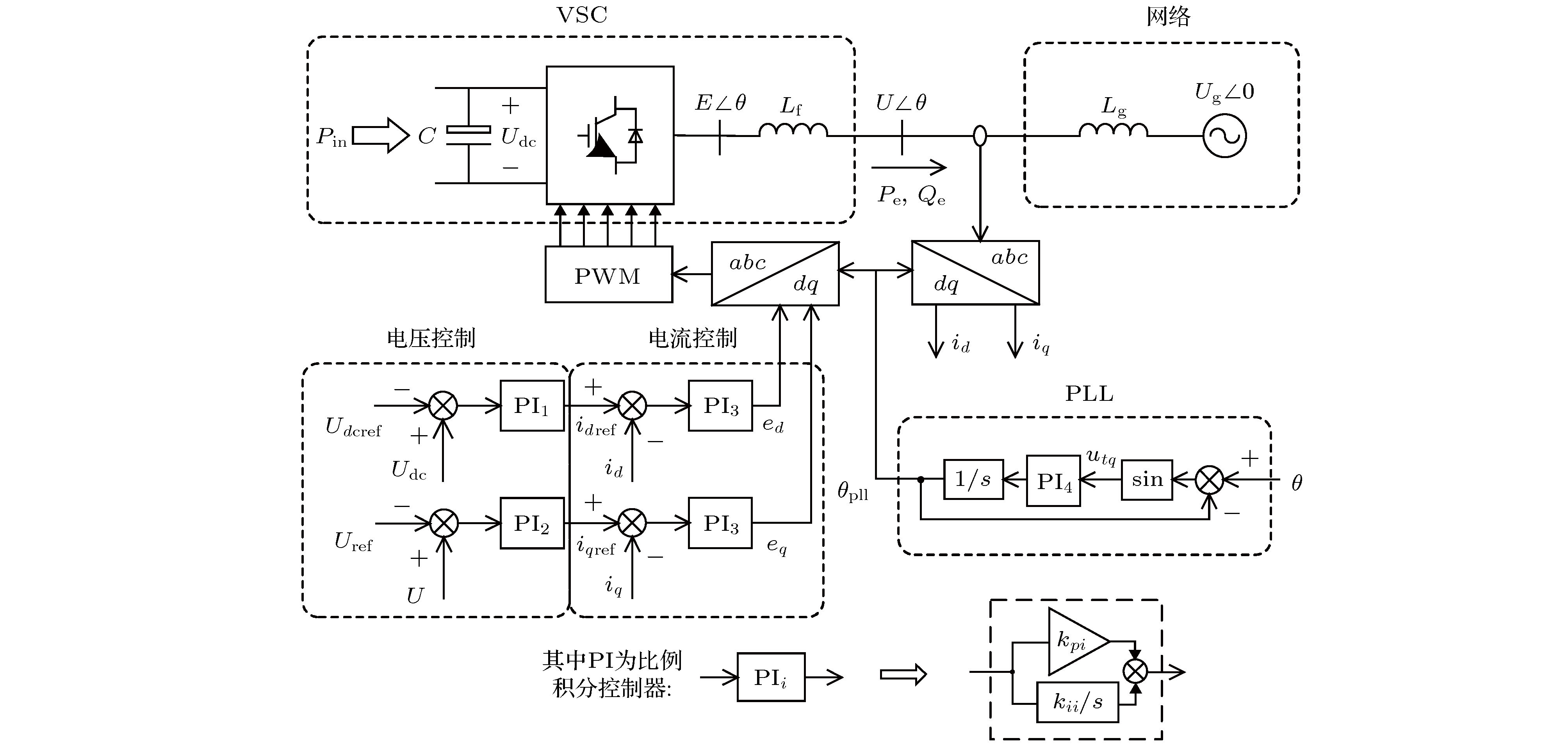
图 6 VSC单机并网系统控制框图
Fig. 6. Schematic show of a grid-connected VSC system and its controllers

图 7 VSC电压时间尺度模型系统控制框图
Fig. 7. Schematic show of the control diagram of the VSC system within the voltage timescale
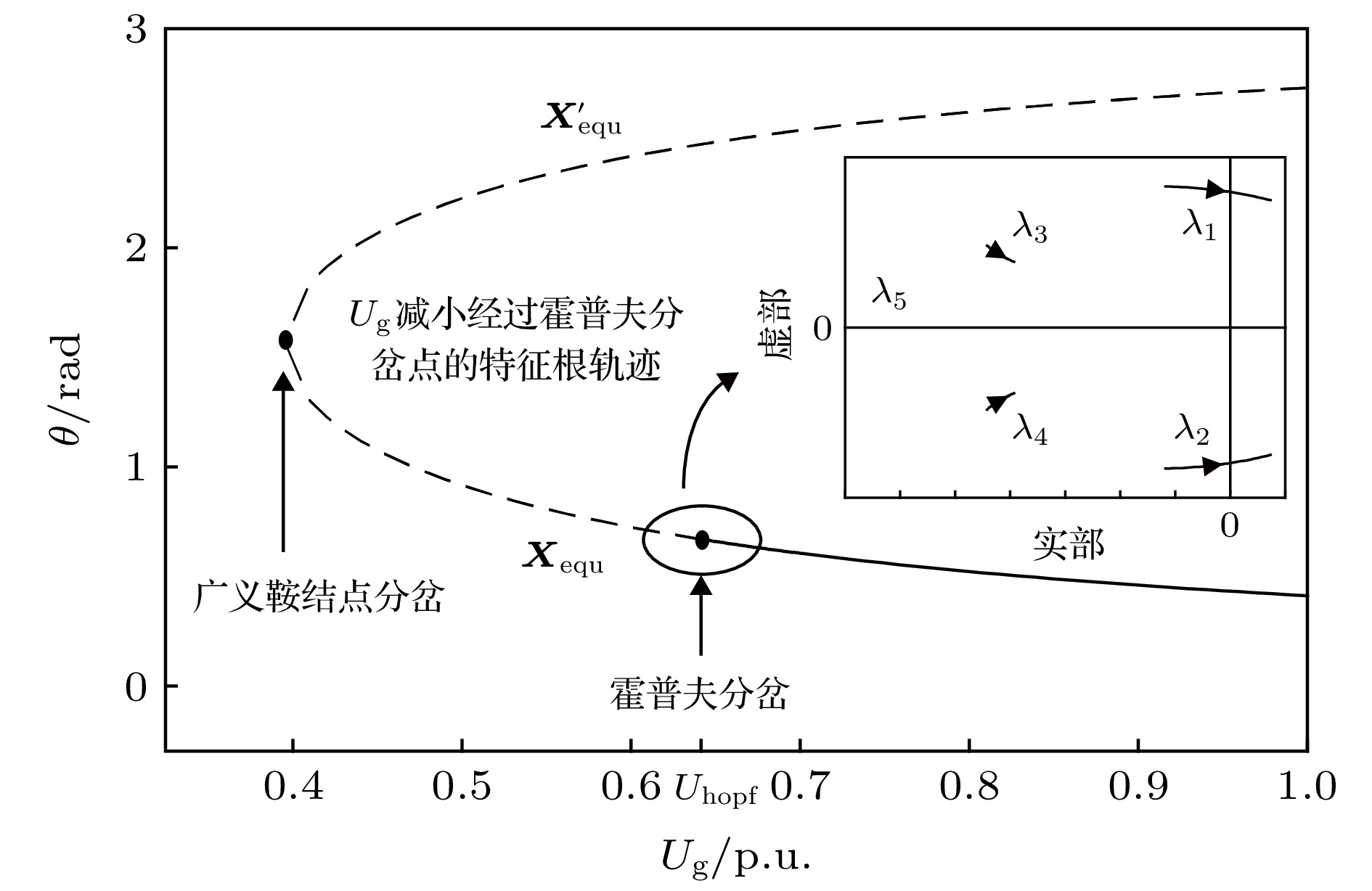
图 8 参数
$ U_{\rm {g}} $ 变化时的分岔图(包含亚临界霍普夫分岔和广义鞍结点分岔). 小图中显示$ U_{\rm {g}} $ 减小时经过霍普夫分岔点的特征根轨迹Fig. 8. Bifurcation diagram with the variation of
$ U_{\rm {g}} $ including a sub-critical Hopf bifurcation and a generalized saddle-node bifurcation. The sub-figure shows the eigenvalue traces when$ U_{\rm {g}} $ decreases and passes through the Hopf bifurcation point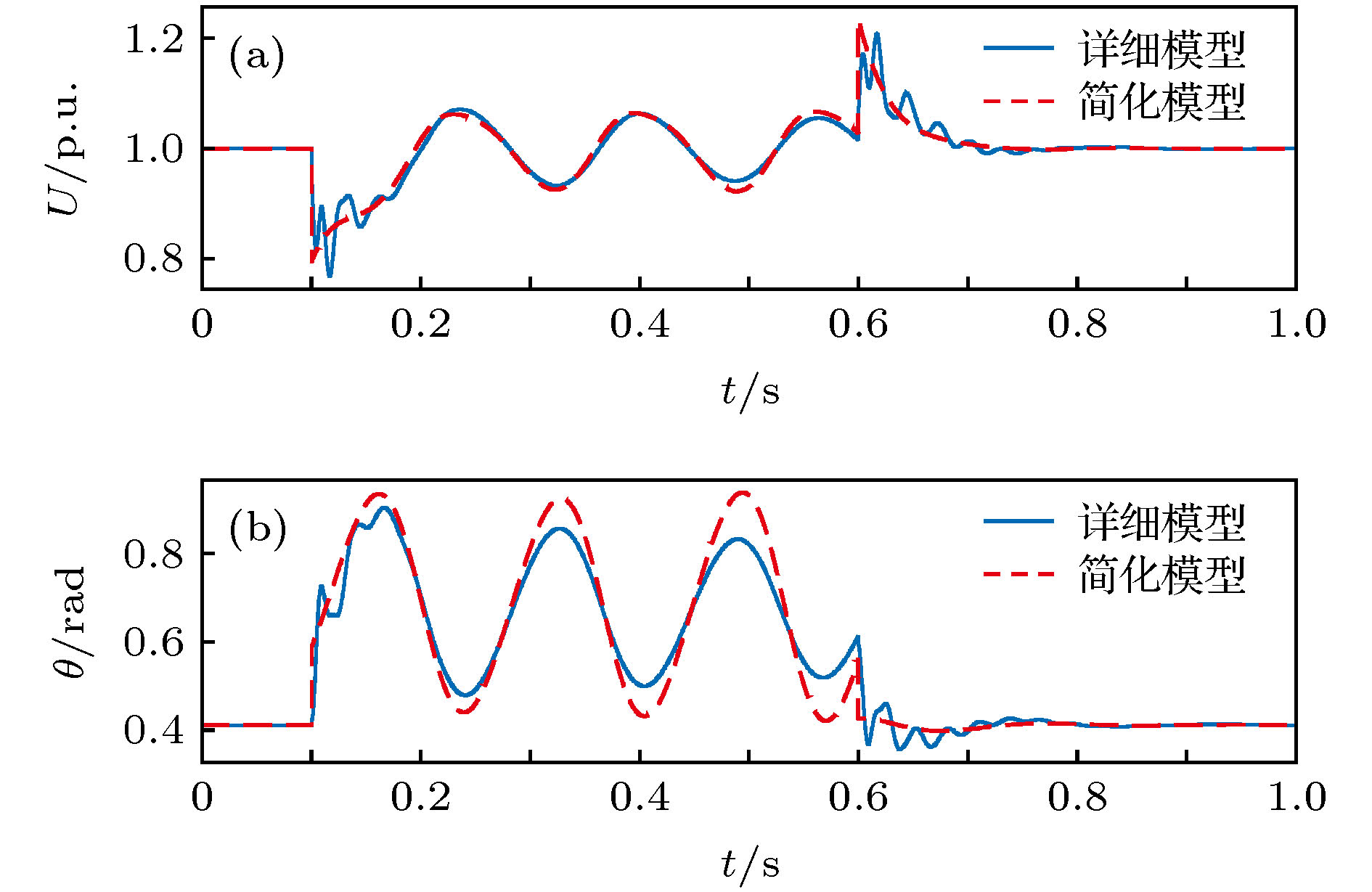
图 9 VSC电压时间尺度模型与详细模型在暂态故障后的响应对比
Fig. 9. Response comparison between the voltage timescale VSC system and the detailed VSC system after transient fault
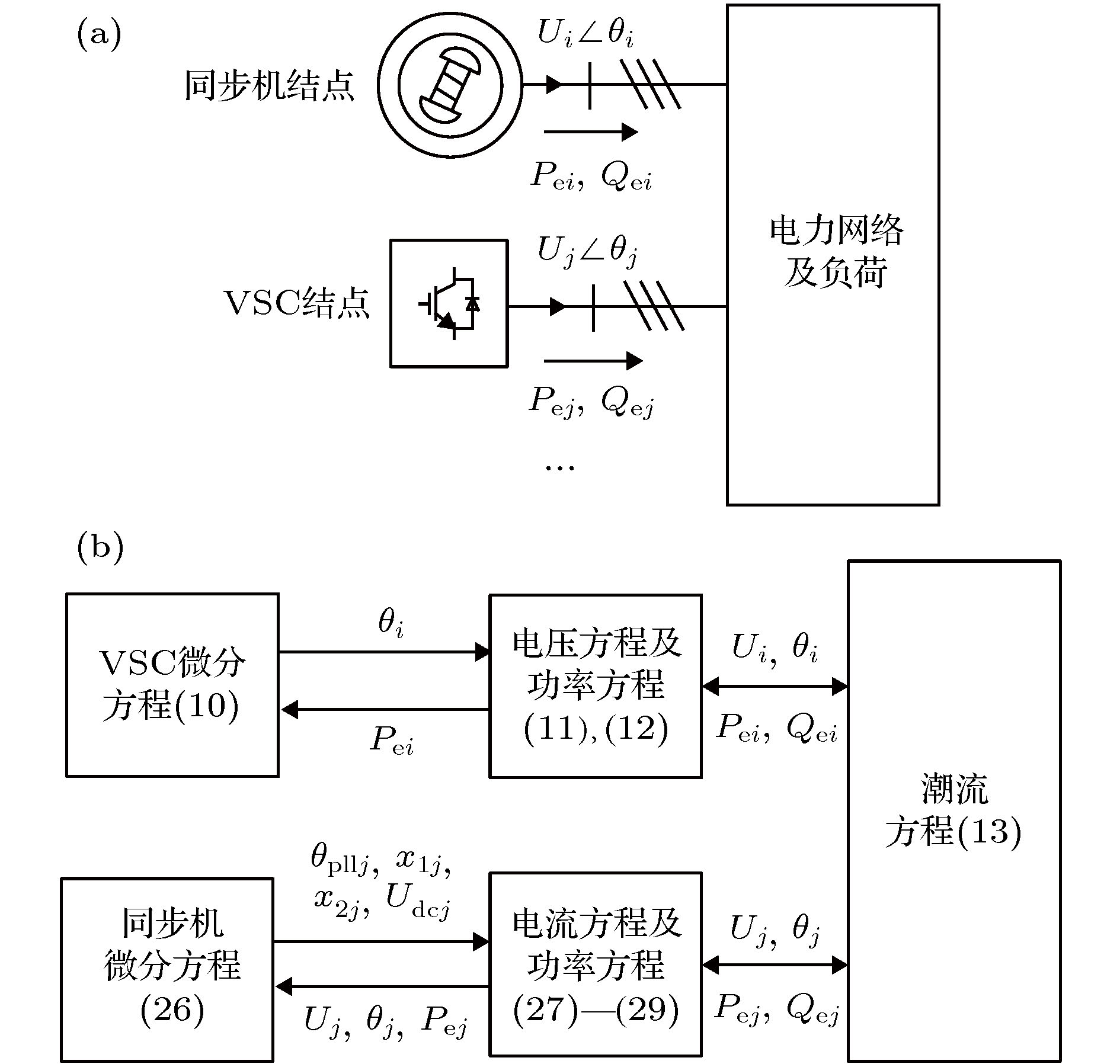
图 10 (a)VSC与同步机多机耦合系统和(b)其微分代数方程组中变量传递关系
Fig. 10. (a) A multi-machine power system with VSC devices and synchronous generators and (b) its variable relations in differential algebraic equations
表 1 电力电子化系统与传统电力系统暂态问题初步比较
Table 1. Comparison of transient problems between Power-electronic-based power systems and traditional power systems
复杂性 时间尺度 系统阶数 传统电力系统 非线性项较少且单一 机电与电磁时间尺度较好分离 同步机二阶模型 电力电子化电力系统 非线性项分布广泛且复杂 多时间尺度间强耦合 装备多样化且高阶  下载: 导出CSV
下载: 导出CSV
-
[1] 周孝信, 陈树勇, 鲁宗相, 黄彦浩, 马士聪, 赵强 2018 电机工程学报 38 1893
Google Scholar
Zhou X X, Chen S Y, Lu Z X, Huang Y H, Ma S C 2018 Proceedings of the CSEE 38 1893
Google Scholar
[2] 袁小明, 程时杰, 胡家兵 2016 电机工程学报 36 5145
Google Scholar
Yuan X M, Cheng S J, Hu J B 2016 Proceedings of the CSEE 36 5145
Google Scholar
[3] 胡家兵, 袁小明, 程时杰 2019 电机工程学报 39 5457
Google Scholar
Hu J B, Yuan X M, Cheng S J 2019 Proceedings of the CSEE 39 5457
Google Scholar
[4] Biaabjerg F, Ma K 2013 IEEE J. Emerging Sel. Top. Power Electron. 1 139
Google Scholar
[5] Biaabjerg F, Teodorescu R, Liserre M, Timbus A V 2006 IEEE Trans. Ind. Electron. 53 1398
[6] National Grid ESO LFDD 09/08/2019 Incident Report https://www.nationalgrideso.com/document/152346/download [2019-11-10]
[7] Kundur P, Balu N J, Lauby M G 1994 Power System Stability and Control (Vol. 1) (New York: McGraw-hill) p827
[8] Anderson P M, Fouad A A 2002 Power System Control and Stability (Vol. 2) (Boloken: John Wiley & Sons) p13
[9] 傅书逷, 倪以信, 薛禹胜 1999 直接法稳定分析(北京: 中国电力出版社) 第25页
Fu S T, Ni Y Y, Xue Y S 1999 Direct Method Stability Analysis (Vol. 1) (Beijing: China Electric Power Press) p25 (in Chinese)
[10] 刘笙, 陈陈 2014 电力系统暂态稳定的能量函数分析: 网络结构保持模型(北京: 科学出版社) 第75页
Liu S, Chen C 2014 Energy Function Analysis of Power Aystem Transient Atability: Network Structure Maintenance Model (Vol. 1) (Beijing: Science Press) p75 (in Chinese)
[11] Chiang H D 2010 Direct Methods for Stability Analysis of Electric Power Systems (Vol. 1) (Beijing: Science Press) p60
[12] Kakimoto N, Ohsawa Y, Hayashi M 1978 Trans. IEE of Japan 98 62
[13] Llamas A, Lopez J, Mili L, Phadke A, Thorp J 1995 IEEE Trans. Power Syst 10 210
[14] Xue Y, Cutsem T V, Ribbens-Pavella V 1988 IEEE Trans. Power Syst. 3 400
Google Scholar
[15] Kalcon G O, Adam G P, Anaya-Lara O, Lo S, Uhlen K 2012 IEEE Trans. Power Syst. 27 1818
[16] Harnefors L, Bongiorno M, Lundberg S 2007 IEEE Trans. Ind. Electron. 54 3323
Google Scholar
[17] Sun J 2011 IEEE Trans. Power Electron. 26 3075
Google Scholar
[18] Rygg A, Molinas M, Zhang C, Cai X 2016 IEEE J. Emerging Sel. Top. Power Electron. 4 1383
Google Scholar
[19] Huang Y, Yuan X, Hu J, Zhou P 2015 IEEE J. Emerging Sel. Top. Power Electron. 3 1193
Google Scholar
[20] Yuan H, Yuan X, Hu J 2017 IEEE Trans. Power Syst. 32 3981
Google Scholar
[21] Yang Z, Mei C, Chen S, Zhan M 2020 IEEE J. Emerging Sel. Top. Power Electron. (in press)
Google Scholar
[22] Kabalan M, Singh P, Niebur D 2016 IEEE Trans. Smart Grid 8 2287
[23] Wu H, Wang X 2018 IEEE Trans. Ind. Electron. 66 6473
[24] Huang L, Xin H, Wang Z, Zhang L, Wu K, Hu J 2017 IEEE Trans. Smart Grid 10 578
[25] Huang M, Wong S C, Chi K T, Ruan X 2012 IEEE Trans. Circuits Syst. I, Reg. Papers 60 1062
[26] Huang M, Peng Y, Chi K T, Liu Y, Sun J, Zha X 2017 IEEE Trans. Power Electron. 32 8868
Google Scholar
[27] Zhang C, Cai X, Li Z, Rygg A, Molinas M 2017 IET Power Electron. 10 894
Google Scholar
[28] Sun J, Wang G, Du X, Wang H 2018 IEEE Trans. Power Electron. 34 3025
[29] Ying J, Yuan X X, Hu J B 2017 IEEE Trans. Energy Convers. 32 1502
Google Scholar
[30] Vittal E, O’Malley M, Keane A 2010 IEEE Trans. Power Syst. 25 433
[31] Gautam D, Vittal V, Harbour T 2009 IEEE Trans. Power Syst. 24 1426
[32] Hu Q, Fu L, Ma F, Ji F 2019 IEEE Trans. Power Syst. 34 3220
Google Scholar
[33] 李明节, 于钊, 许涛, 贺静波, 王超, 谢小荣, 刘纯 2017 电网技术 41 1035
Google Scholar
Li M J, Yu Z, Xu T, He J B, Wang C, Xie X X, Liu C 2017 Proceedings of the CSEE 41 1035
Google Scholar
[34] Menck P J, Heitzig J, Kurths J, Schellnhuber H J 2014 Nat.Commun. 5 3969
Google Scholar
[35] Schultz P, Heitzig J, Kurths J 2014 New J.Phys. 16 125001
Google Scholar
[36] Rohden M, Sorge A, Timme M, Witthaut D 2012 Phys. Rev. Lett. 109 064101
Google Scholar
[37] Schafer B, Witthaut D, Timme M, Latora V 2018 Nat. Commun. 9 1975
Google Scholar
[38] Motter A E, Myers S A, Anghel M, Nishikawa T 2013 Nat. Phys. 9 191
Google Scholar
[39] Yang Y, Nishikawa T, Motter A E 2017 Science 358 3184
Google Scholar
[40] Dorfler F, Chertkov M, Bullo F 2013 PNAS 110 2005
Google Scholar
[41] Grob D, Arghir C, Dorfler F 2018 Automatica 90 248
Google Scholar
[42] Carareto R, Baptista M S, Grebogi C 2013 Commun. Nonlinear Sci. Numer. Simul. 18 1035
Google Scholar
[43] Ma J, Sun Y, Yuan X, Kurths J, Zhan M 2016 PLoS ONE 11 e0165943
Google Scholar
[44] Sun Y, Kurths J, and Zhan M 2017 CHAOS 27 083116
Google Scholar
[45] Y Sun, J Ma, J Kurths, M Zhan 2018 Proc. R. Soc. London, Ser. A 474 20170733
Google Scholar
[46] M He, W He, J Hu, X Yuan, M Zhan 2019 Nonlinear Dynamics 95 1965
Google Scholar
[47] Q Yue, J Yu, Zhan M 2019 IET RPG 2019 International Conference on Renewable Power Generation Shanghai, China, October 24–25, 2019 p294
[48] Qiu Q, Ma R, Kurths J, Zhan M 2020 Chaos 30 013110
Google Scholar
[49] Yang Z Q, Ma R, Chen S, Zhan M 2020 IEEE J. Emerging. Sel. Top. Power Electron. (in press)
Google Scholar
[50] Ma R, Yang Z, Cheng S, Zhan M 2020 Sustained Oscillations and Bifurcations in Three-phase VSC Tied to AC Gird (submitted) IET Renewable Power Generation
[51] Strogatz S H 2018 Nonlinear Dynamics and Chaos: with Applications to Physics, Biology, Chemistry, and Engineering (Vol. 2) (Boulder: Westview Press) p241
[52] Kuehn C 2015 Multiple Time Scale Dynamics (Vol. 1) (Berlin: Springer International Publishing) p53

 下载:
下载:







计量
- 文章访问数: 34370
- PDF下载量: 620
- 被引次数: 0
