










-
针对实时广域高分辨率成像需求, 充分利用具有对称结构的多层共心球透镜视场大且各轴外视场成像效果一致性好的特点, 设计基于共心球透镜的多尺度广域高分辨率计算成像系统. 该系统基于计算成像原理, 通过构建像差优化函数获得光学系统设计参数, 结合球形分布的次级相机阵列进行全局性优化, 提高系统性能的同时有效简化光学设计过程、降低系统设计难度. 系统稳定性测试结果表明, 该成像系统的MTF (modulation transmission function)值在截止频率处接近衍射极限, 弥散斑均方根恒小于探测器像元尺寸, 整机实景实时成像效果良好, 无视觉可见畸变. 该系统不仅有效解决了传统成像中广域和高分辨率成像矛盾的问题, 而且为计算光学成像系统设计奠定了一定研究基础.Imaging systems with a wide field-of-view (FOV) and high-resolution, which can provide abundant target information, are always desired in various applications including target detection, environment monitoring, marine rescue, etc. Various approaches to realizing the wide FOV and high-resolution imaging have been developed, for example, fisheye lens imaging system, and panoramic optical annular staring imaging technology. In these single aperture imaging systems, the maximum resolution and FOV are determined by either the geometric aberration or the diffraction limit of the optics. Multi-scale monocentric ball-lens imaging system is of particular importance due to its high real-time ability, small image distortion, and wide FOV. The complete geometrical symmetry of multilayer monocentric ball-lens makes it possible to compensate for the geometric aberration with no need of additional assistance. However, the major problem in designing imaging system based on multi-scale monocentric ball-lens is that there are too many variables needed to be set for a ball-lens imaging structure and the problems of high time cost and computation complexity.For simplifying the design process, in this manuscript, we apply the computational imaging theory to optical system design, thereby developing a geometric aberration optimization function to determine the initial values of the desired system by the sound computation rather than repetitive iterations by using the optical system design software. Function development starts from the aberration theory. Since the monocentric ball lens does not bring in the aberrations relating to FOV, only spherical aberration and chromatic aberration are needed to be considered. The optimization function is then founded according to the principle of minimizing the spherical aberration and chromatic aberration. And then with the determined initial parameters, ZEMAX is employed to globally optimize the residual geometric aberrations, which is time-efficient. After required parameters are finally determined, the system performance is evaluated via the modulation transmission function, the spot diagram distribution, the field-curve and distortion value and the ray fan curve. Favorable results are obtained, which demonstrates the feasibility of the developed system designing approach. Imaging results from the finished prototype system are pretty satisfactory with wide FOV and high resolution which is captured through only one frame. The multi-scale wide FOV and high-resolution computation imaging system not only solves the conflict between the wide FOV and high resolution, but also provides the research foundation for computational imaging.
-
Keywords:
- wide field of view and high-resolution imaging system /
- computational imaging /
- optical system design /
- multi-scale imaging
[1] Claire S K, Jeffrey R H, Timothy K L, Joi W, Raymond G F, Bryan Z, Takahiro I, Allen B, Seung J, John P C, Amit C, Markus W C, Tannishtha R 2016 Nat. Commun. 7 1
[2] Jisoo K, Doo J P, Sun J B, Jaeho L, Soo B C, Seongjun P, Sung W H 2014 Opt. Express 22 31875
 Google Scholar
Google Scholar
[3] Brady D J, Gehm M E, Stack R A, Marks D L, Kittle D S, Golish D R, Vera E M, Feller S D 2012 Nature 486 386
Google Scholar
[4] Golish D R, Vera E M, Kelly K J, Gong Q, Jansen P A, Hughes J M, Kittle D S, Brady D J, Gehm M E 2012 Opt. Express 20 22048
Google Scholar
[5] 闫阿奇, 祝青, 曹剑中, 周泗忠, 杨正, 刘宇波 2008 光子学报 37 1975
Yan A Q, Zhu Q, Cao J Z, Zhou S Z, Yang Z, Liu Y B 2008 Acta Photon. Sin. 37 1975
[6] Matthew J L, George B, Michael F 2012 Remote Sensing 4 3006
Google Scholar
[7] Wang X, Li L, Hou G Q 2016 Appl. Opt. 55 2580
Google Scholar
[8] Yu H, Wan Q H, Lu X R, Du Y C, Yang S W 2017 Appl. Opt. 56 755
Google Scholar
[9] Tremblay E J, Marks D L, Brady D J, Ford J E 2012 Appl. Opt. 51 4691
Google Scholar
[10] Wang S, Heidrich W 2004 Comput. Graphics Forum 23 441
Google Scholar
[11] Donggyun K, Jinho P, Joonki P 2014 Opt. Lett. 39 6261
Google Scholar
[12] Antonino F, Giovanni M F, Arcangelo R B, Sebastiano B 2017 IEEE Trans. Image Process. 26 696
Google Scholar
[13] Mo Z, Robert H C, Juliet T G 2016 Opt. Express 21 23798
[14] Huang Z, Bai J, Lu T X, Hou X Y 2013 Opt. Express 21 10810
Google Scholar
[15] Yan J L, Kong L S, Diao Z H, Liu X F, Zhu L L, Jia P 2018 Appl. Opt. 3 396
[16] Lohmann A W 1989 Appl. Opt. 28 4996
Google Scholar
[17] Cossairt O S, Nayar S K 2010 Proceeding on 2010 IEEE International Conference on Computational Photography (ICCP) Pittsburgh, USA, March 29–30, 2010 p1
[18] Brady D J, Hagen H 2009 Opt. Express 13 10659
[19] Marks D L, Llull P R, Philips Z, Anderson J G, Feller S D, Vera E M, Son H S, Youn S, Kim J, Gehm M E, Brady D J, Nichols J M, Judd K P, Duncan M D, Waterman J R, Stack R A, Johnson A, Tennill R, Olson C C 2014 Appl. Opt. 53 C54
Google Scholar
[20] Patrick L, Lauren B, Zachary P, Kyle D, Marks D L, Brady D J 2015 Optica 2 1086
Google Scholar
[21] Cossairt O S, Miau D, Nayar S K 2011 J. Opt. Soc. Am. A 28 2540
Google Scholar
[22] Born M, Wolf E 2016 Principles of Optics: Electromagnetic Theory of Propagation, Interference and Diffraction of Light, 7nd Edition (Cambridge: Cambridge University Press) p210
[23] Luke P L, Robert S 2005 Science 310 1148
Google Scholar
[24] Sasian J 2010 Appl. Opt. 49 D69
Google Scholar
[25] Lijun L, Yiqing C 2017 Appl. Opt. 56 8570
Google Scholar
-

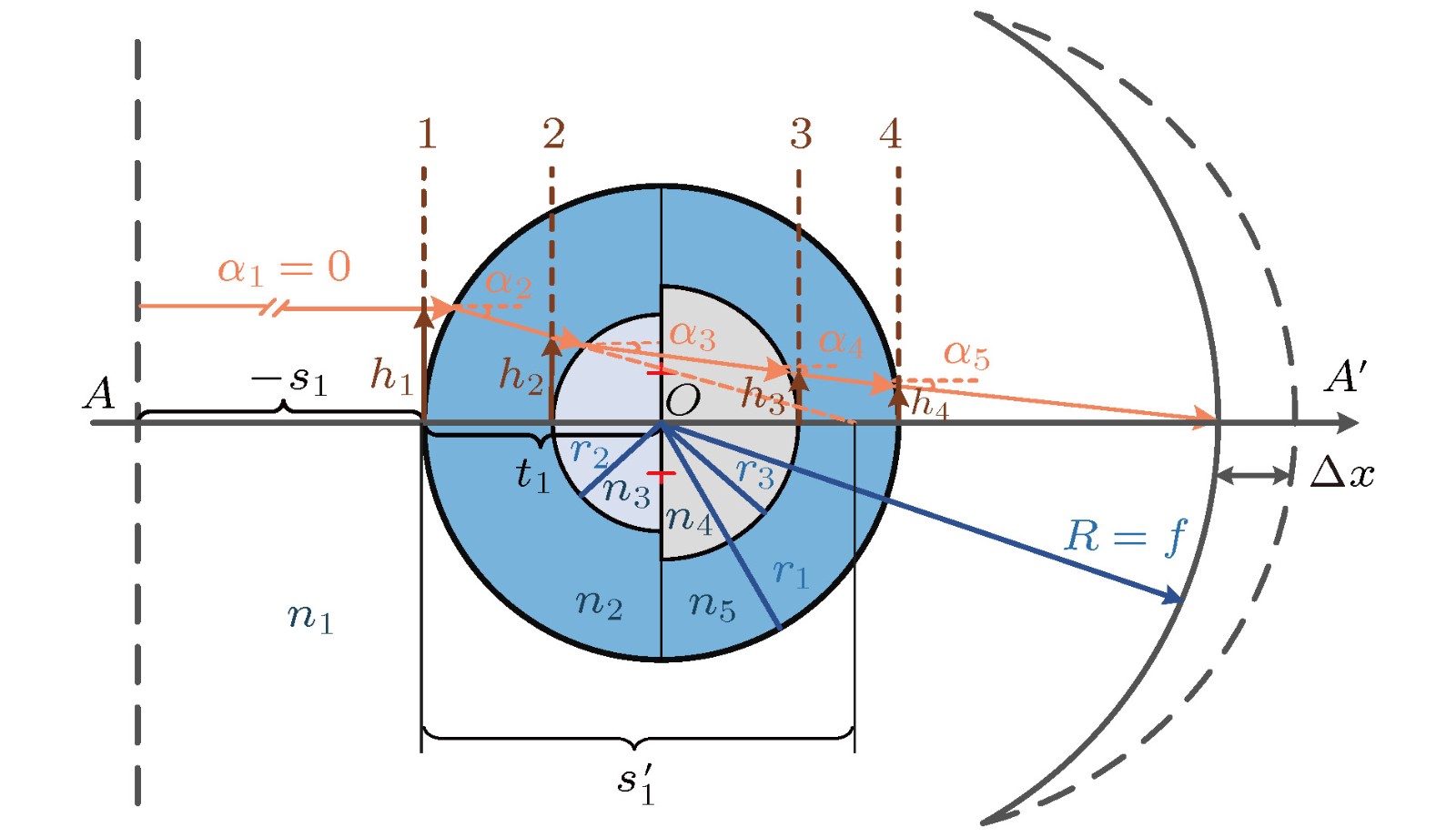
图 1 基于共心球透镜的广域高分辨率成像原理图
Fig. 1. Schematic of monocentric wide field of view (FOV) and high-resolution computational imaging system.
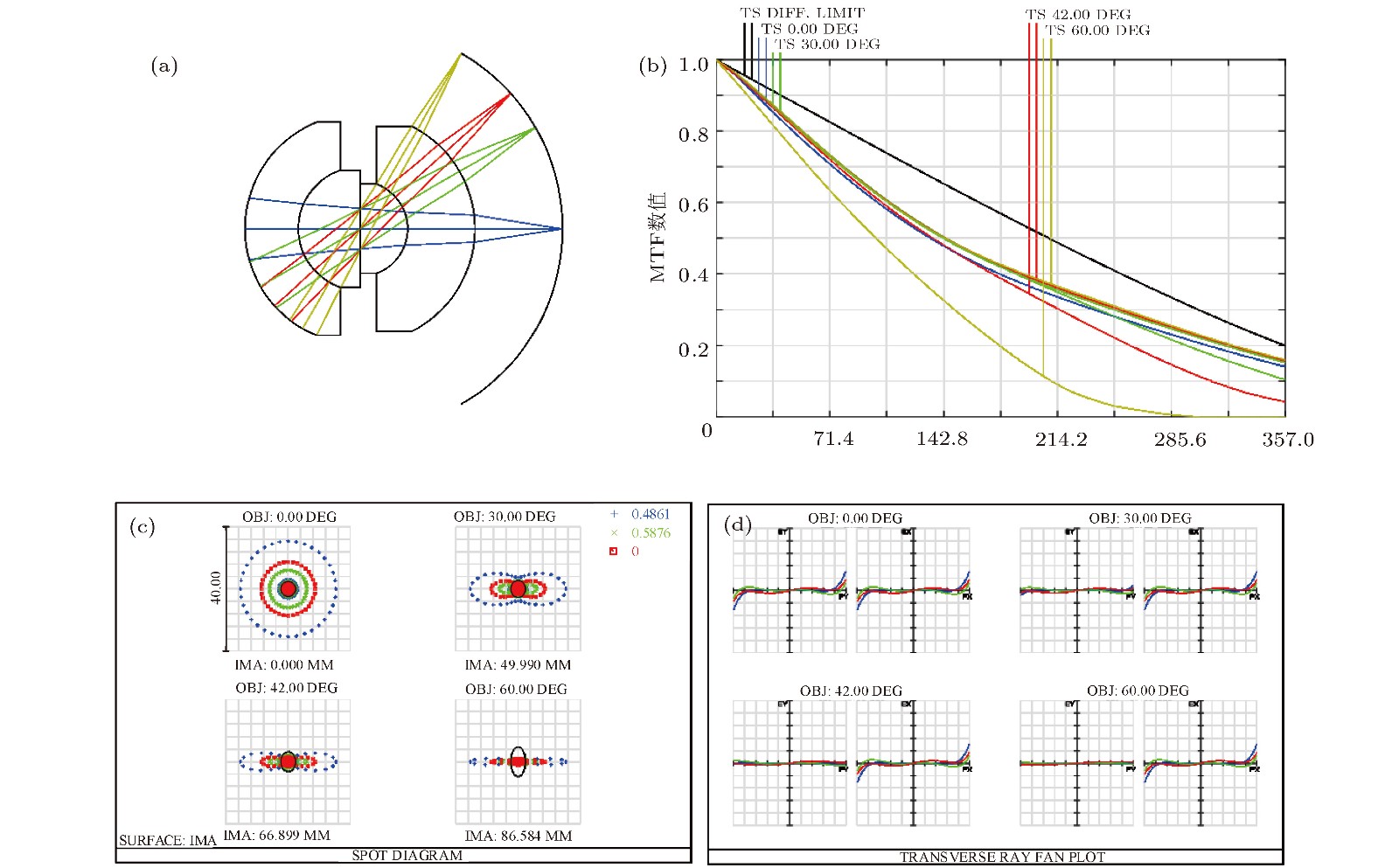
图 3 (a)共心球透镜二维成像结构图; (b)调制传递函数曲线图; (c)共心球透镜点列图; (d)共心球透镜光线像差图
Fig. 3. (a) Structure of the designed monocentric ball-lens; (b) MTF curves; (c) the spot diagram; (d) the ray fan curves.
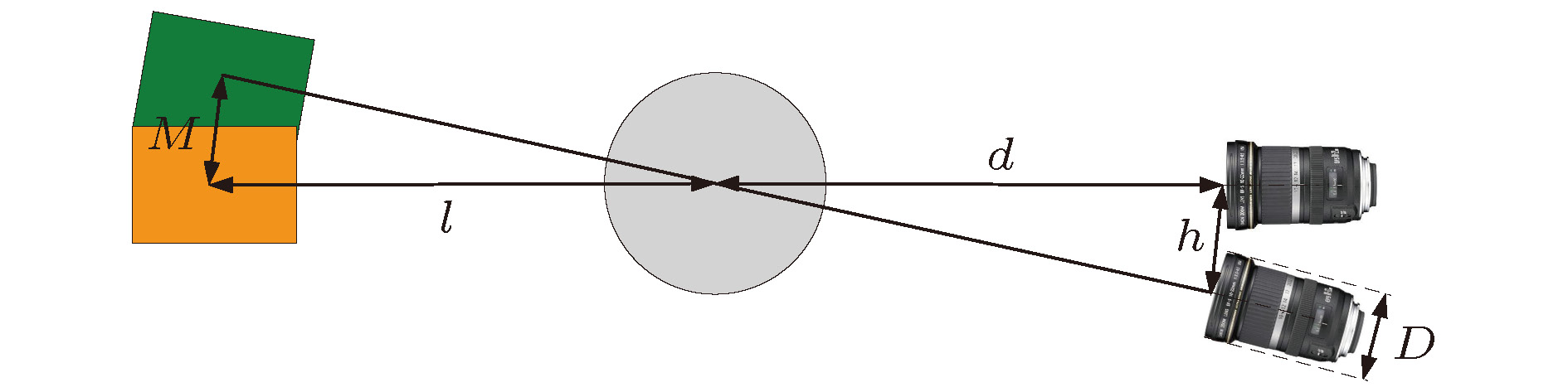
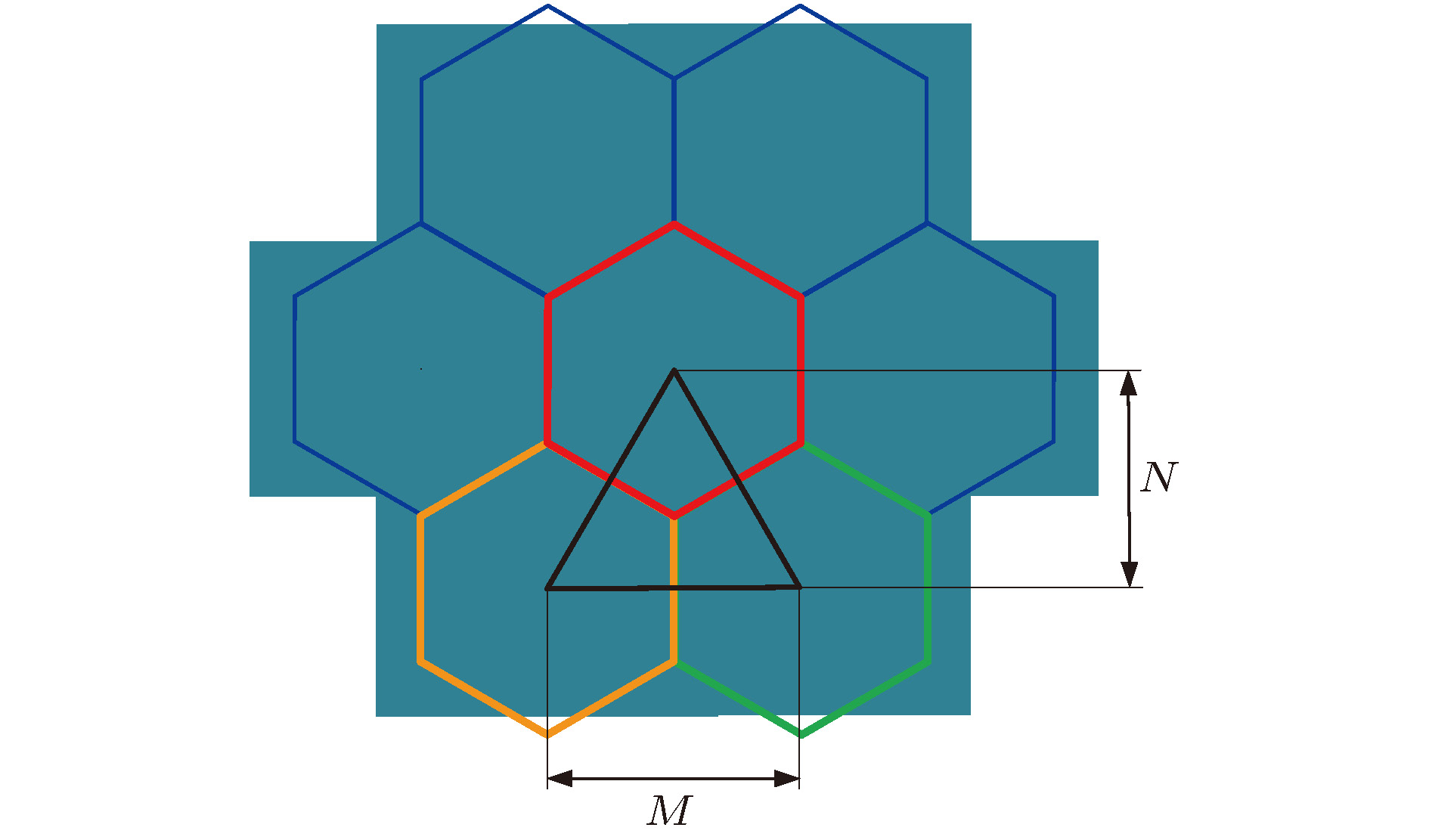
图 4 相邻小尺度相机视场重叠对应关系示意图
Fig. 4. Schematic showing the FOV overlapping betweenthe adjacent micro cameras.
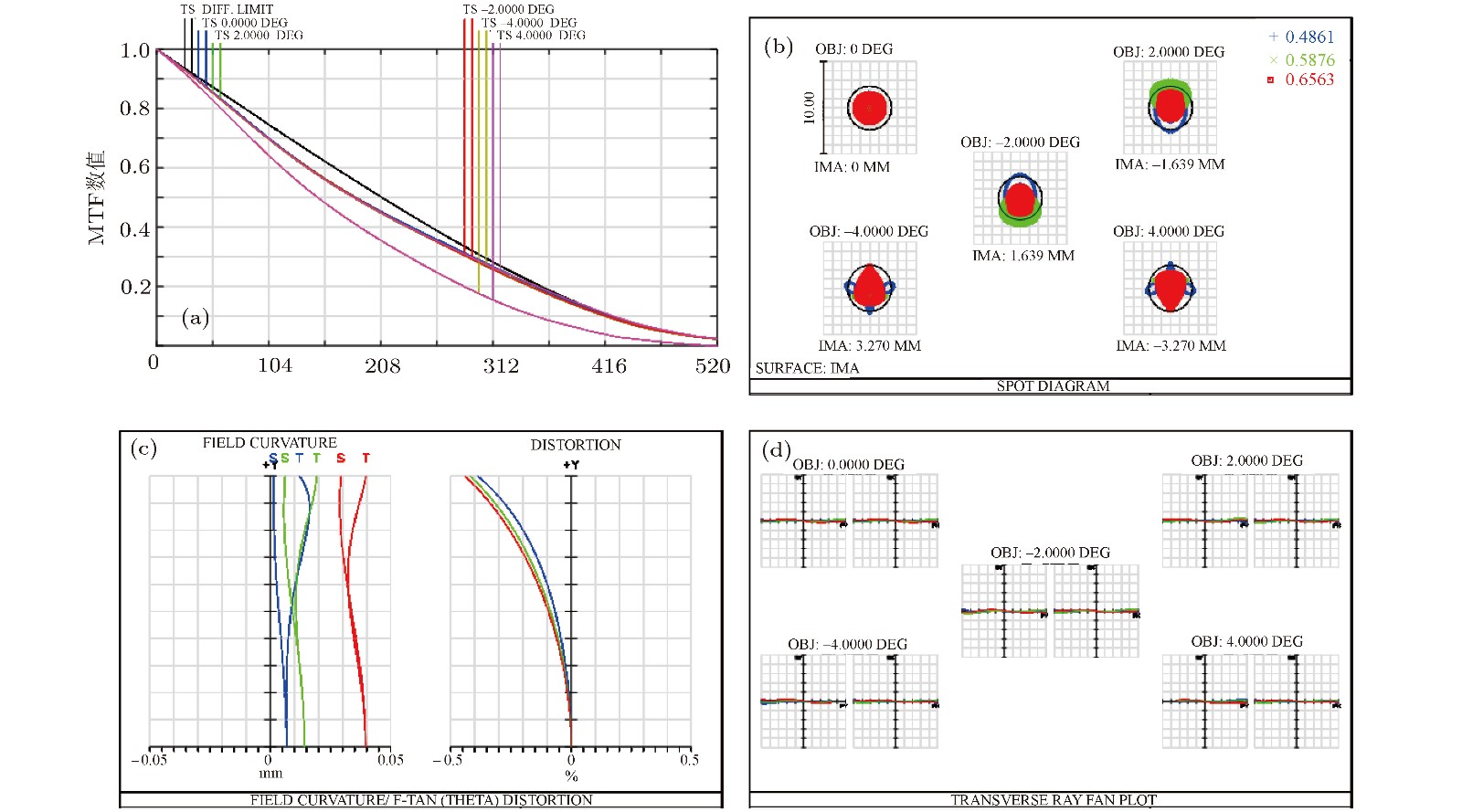
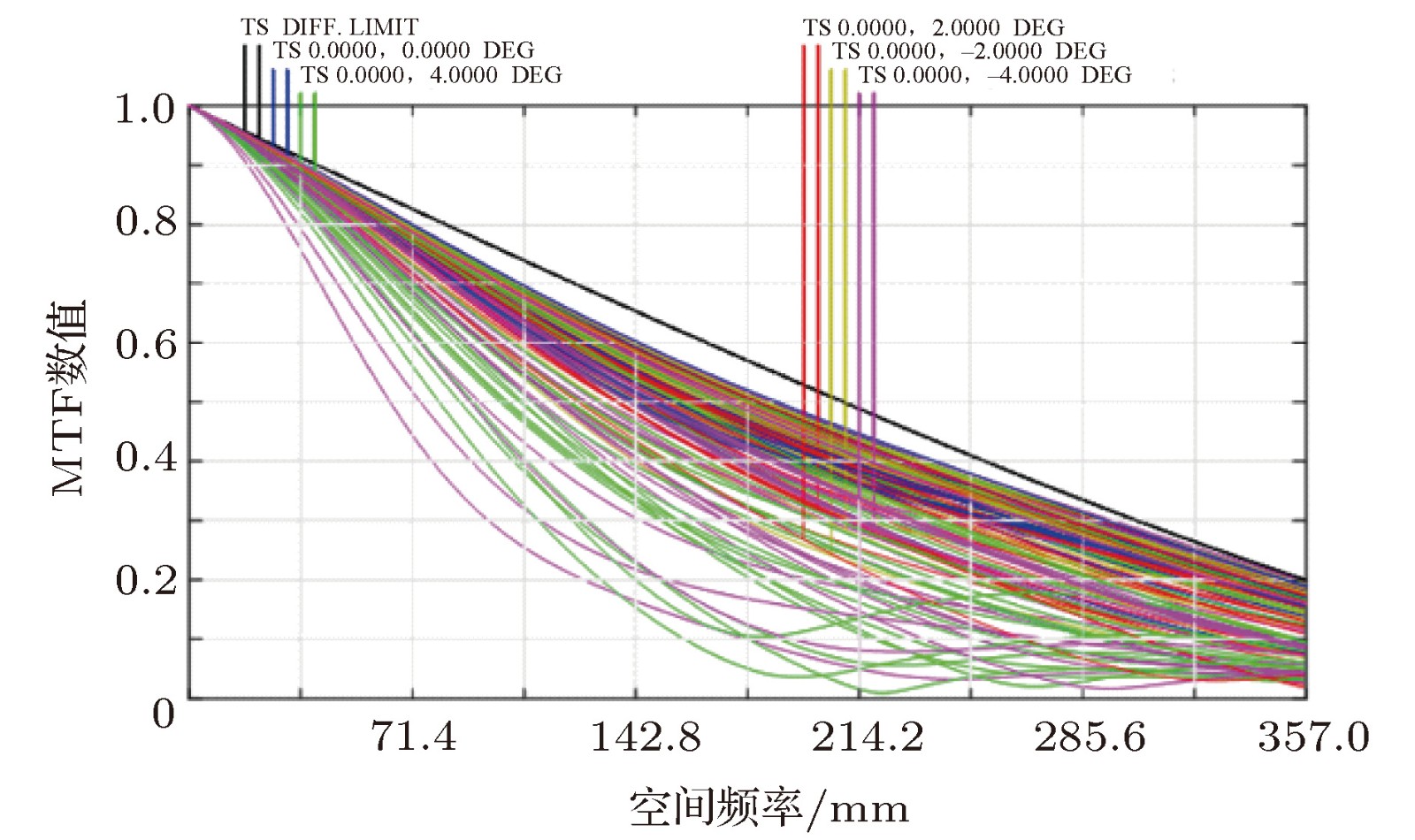
图 7 (a)系统MTF曲线图; (b)系统点列图; (c)系统场曲和畸变图; (d)系统光线像差图
Fig. 7. (a) MTF curves of the whole system; (b) the spot diagram; (c) the field-curve and distortion; (d) the ray fan of the system.
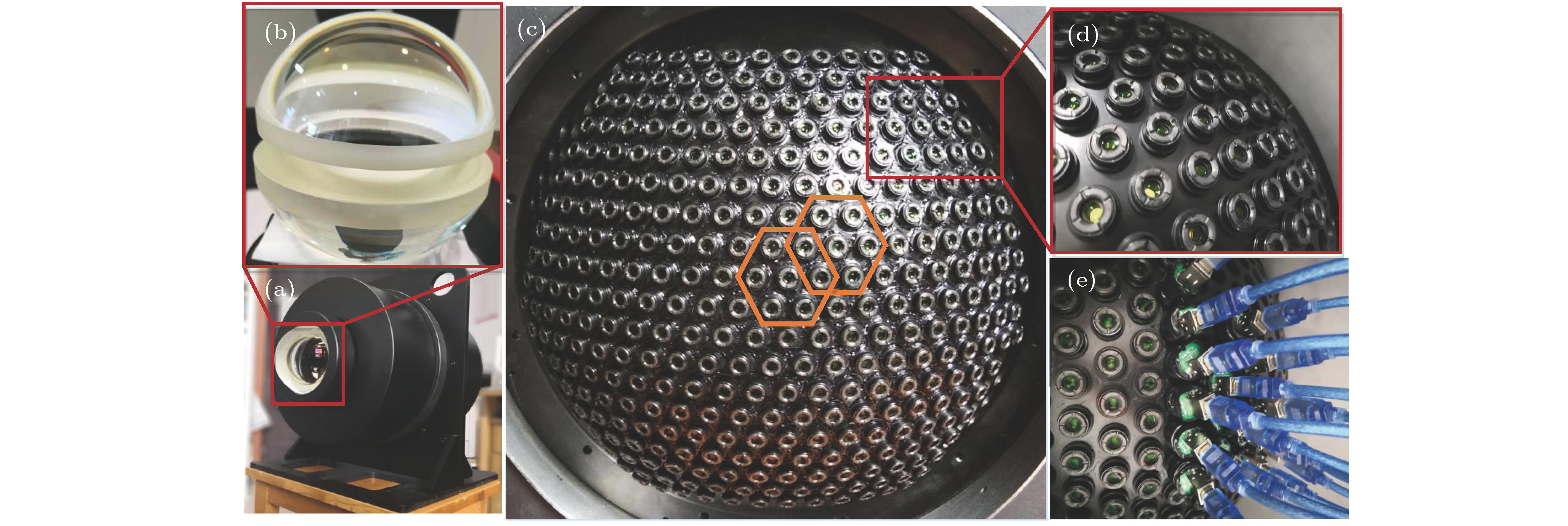
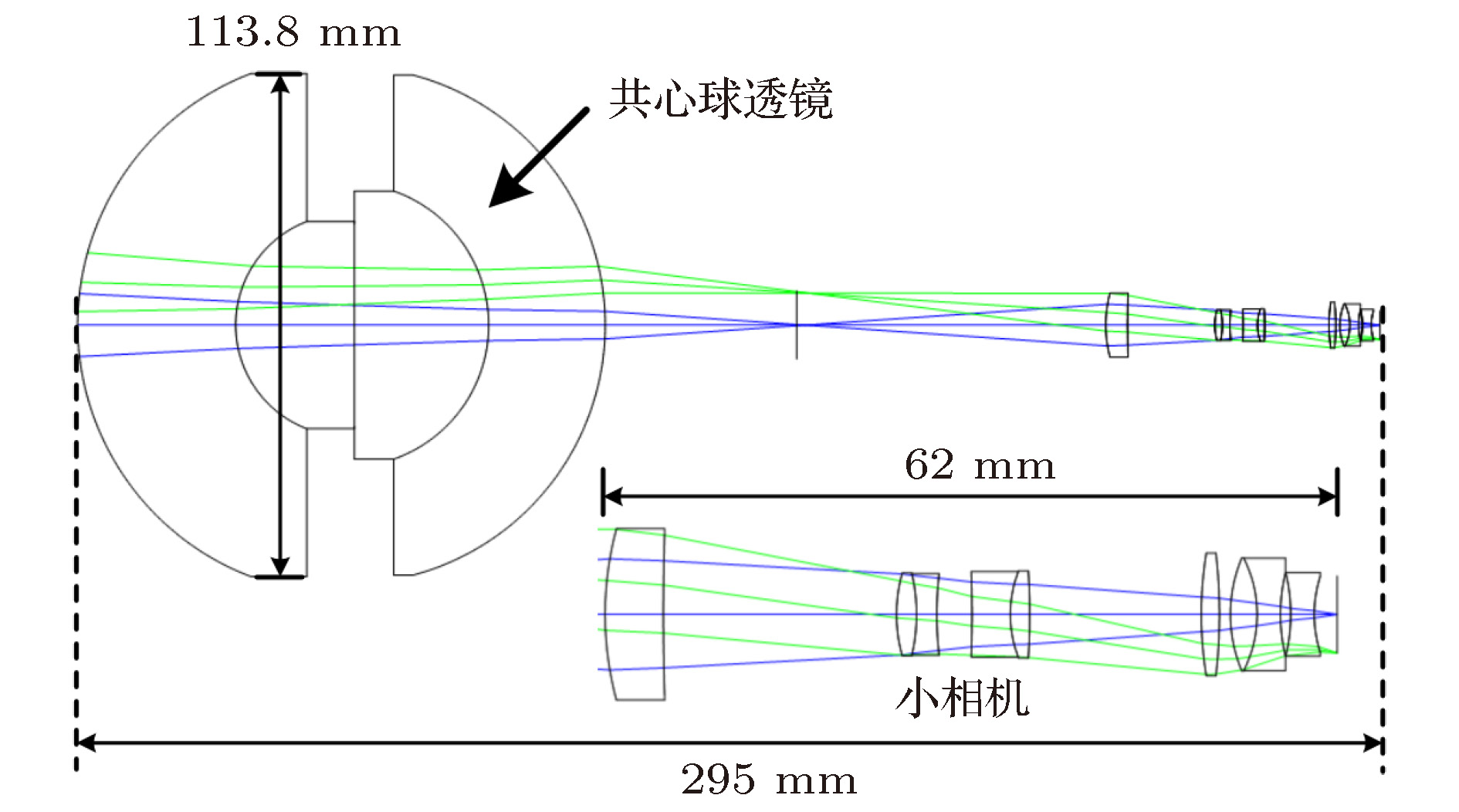
图 9 多尺度广域高分辨率计算成像系统结构图
Fig. 9. Prototype of the multi-scale wide FOV high-resolution computational imaging system.

图 10 (a)测试平台结构示意图; (b)测试平台实物; (c)靶标板图像; (d)分辨率图案参数表
Fig. 10. (a) Test platform structure diagram; (b) test platform; (c) the image of target plate; (d) resolution pattern parameters table
表 1 共心球透镜初始结构参数
Table 1. Structural parameters of the monocentric ball-lens.
面序号 曲率半径/mm 厚度/mm 玻璃 半口径/mm 1 56.90 31.89 H-ZF12 51.516 2 25.01 25.01 H-BAK8 23.238 STO Infinity 32.20 H-BAK8 6.4240 4 –32.20 24.70 H-ZF12 28.975 5 –56.90 40.135 50.247  下载: 导出CSV
下载: 导出CSV
-
[1] Claire S K, Jeffrey R H, Timothy K L, Joi W, Raymond G F, Bryan Z, Takahiro I, Allen B, Seung J, John P C, Amit C, Markus W C, Tannishtha R 2016 Nat. Commun. 7 1
[2] Jisoo K, Doo J P, Sun J B, Jaeho L, Soo B C, Seongjun P, Sung W H 2014 Opt. Express 22 31875
Google Scholar
[3] Brady D J, Gehm M E, Stack R A, Marks D L, Kittle D S, Golish D R, Vera E M, Feller S D 2012 Nature 486 386
Google Scholar
[4] Golish D R, Vera E M, Kelly K J, Gong Q, Jansen P A, Hughes J M, Kittle D S, Brady D J, Gehm M E 2012 Opt. Express 20 22048
Google Scholar
[5] 闫阿奇, 祝青, 曹剑中, 周泗忠, 杨正, 刘宇波 2008 光子学报 37 1975
Yan A Q, Zhu Q, Cao J Z, Zhou S Z, Yang Z, Liu Y B 2008 Acta Photon. Sin. 37 1975
[6] Matthew J L, George B, Michael F 2012 Remote Sensing 4 3006
Google Scholar
[7] Wang X, Li L, Hou G Q 2016 Appl. Opt. 55 2580
Google Scholar
[8] Yu H, Wan Q H, Lu X R, Du Y C, Yang S W 2017 Appl. Opt. 56 755
Google Scholar
[9] Tremblay E J, Marks D L, Brady D J, Ford J E 2012 Appl. Opt. 51 4691
Google Scholar
[10] Wang S, Heidrich W 2004 Comput. Graphics Forum 23 441
Google Scholar
[11] Donggyun K, Jinho P, Joonki P 2014 Opt. Lett. 39 6261
Google Scholar
[12] Antonino F, Giovanni M F, Arcangelo R B, Sebastiano B 2017 IEEE Trans. Image Process. 26 696
Google Scholar
[13] Mo Z, Robert H C, Juliet T G 2016 Opt. Express 21 23798
[14] Huang Z, Bai J, Lu T X, Hou X Y 2013 Opt. Express 21 10810
Google Scholar
[15] Yan J L, Kong L S, Diao Z H, Liu X F, Zhu L L, Jia P 2018 Appl. Opt. 3 396
[16] Lohmann A W 1989 Appl. Opt. 28 4996
Google Scholar
[17] Cossairt O S, Nayar S K 2010 Proceeding on 2010 IEEE International Conference on Computational Photography (ICCP) Pittsburgh, USA, March 29–30, 2010 p1
[18] Brady D J, Hagen H 2009 Opt. Express 13 10659
[19] Marks D L, Llull P R, Philips Z, Anderson J G, Feller S D, Vera E M, Son H S, Youn S, Kim J, Gehm M E, Brady D J, Nichols J M, Judd K P, Duncan M D, Waterman J R, Stack R A, Johnson A, Tennill R, Olson C C 2014 Appl. Opt. 53 C54
Google Scholar
[20] Patrick L, Lauren B, Zachary P, Kyle D, Marks D L, Brady D J 2015 Optica 2 1086
Google Scholar
[21] Cossairt O S, Miau D, Nayar S K 2011 J. Opt. Soc. Am. A 28 2540
Google Scholar
[22] Born M, Wolf E 2016 Principles of Optics: Electromagnetic Theory of Propagation, Interference and Diffraction of Light, 7nd Edition (Cambridge: Cambridge University Press) p210
[23] Luke P L, Robert S 2005 Science 310 1148
Google Scholar
[24] Sasian J 2010 Appl. Opt. 49 D69
Google Scholar
[25] Lijun L, Yiqing C 2017 Appl. Opt. 56 8570
Google Scholar

 下载:
下载:

计量
- 文章访问数: 15406
- PDF下载量: 254
- 被引次数: 0
