










-
针对现有舰船磁场等效源反演建模方法存在的精度较低和适应性不强的问题, 提出了一种舰船磁场磁单极子阵列反演建模新方法, 按照舰船铁磁结构布置磁单极子阵列, 采用正则化技术进行舰船磁场的反演建模. 建立了三种典型的磁单极子阵列形式: 舰船水线平面上的长方形阵列、包围船体的长方体阵列、按照舰船铁磁结构分布的三维船体阵列. 理论分析表明, 三维船体磁单极子阵列减少了等效磁源设置的盲目性, 所得到的等效磁源与真实磁源一致性高, 能够更大程度地复现舰船磁场完整信息. 利用典型虚拟舰船的磁场进行了验证试验, 结果表明所提出的三维船体磁单极子阵列比长方形或长方体阵列具有更高的精度和适应性, 特别是能实现舰船远磁场与近磁场、舰船上方和下方磁场之间的相互精确转换. 所提出的三维船体磁单极子阵列模型具有复杂度小, 建模简单, 布置灵活的独特优势, 为舰船磁场高精度反演建模、磁场定位等的数据处理和解释提供了新的技术选择.Aiming at the problems of low accuracy and low adaptability of the existing ship magnetic field inversion modeling methods with equivalent sources, a new method of inversion modeling of magnetic monopole array of ship magnetic fields is proposed. Three-dimensional ship magnetic monopole array is arranged according to the ship ferromagnetic structure, and the inversion prediction model of ship magnetic fields is established by regularization technology. Three typical forms of magnetic monopole arrays are established: rectangular magnetic monopole array on the horizontal surface of the draft line, cuboid magnetic monopole array enclosing the ship hull, three-dimensional ship magnetic monopole array distributed according to the ship’s ferromagnetic structure. The theoretical analysis shows that the three-dimensional ship magnetic monopole array reduces the blindness of the equivalent magnetic source setting, and the obtained equivalent magnetic source is highly consistent with the real magnetic source, which can reproduce the complete magnetic field information of the ship to a greater extent. The magnetic field of a typical virtual ship is applied to the validation test. The results show that the proposed three-dimensional ship magnetic monopole array has higher precision and adaptability than the rectangular or cuboid magnetic monopole array. In particular, the proposed three-dimensional ship magnetic monopole array can realize the mutual conversion between the near and far magnetic fields, and between the magnetic fields above and below the ship. The proposed three-dimensional ship magnetic monopole array model has the unique advantages of small complexity, simple modeling and flexible layout, and it provides an alternative method for the high-precision data processing and explanation to the inversion modeling of ship magnetic fields, ship magnetic field positioning, et al.
-
Keywords:
- magnetostatic field /
- equivalent source method /
- magnetic monopole /
- ship’s magnetic signature
[1] Holmes J J 2007 Modeling A Ship’s Ferromagnetic Signatures (Maryland: Morgan & Claypool Publishers) p3
[2] Holmes J J 2008 Reduction of a Ship’s Magnetic Field Signatures (Maryland: Morgan & Claypool Publishers) p8
[3] Nixon D A, Baker F E 1981 J. Appl. Phys. 52 539
 Google Scholar
Google Scholar
[4] Kildishev A V, Nyenhuis J A, Morgan M A 2002 IEEE Trans. Magn. 38 2465
Google Scholar
[5] 陈杰, 鲁习文 2009 物理学报 58 3839
Google Scholar
Chen J, Lu X W 2009 Acta Phys. Sin. 58 3839
Google Scholar
[6] Synnes S A 2008 IEEE Trans. Magn. 44 2277
Google Scholar
[7] Kamondetdacha R, Kildishev A V, Nyenhuis J A 2004 IE
EE Trans. Magn. 40 2176 Google Scholar
[8] 蒋敏志,林春生 2003 武汉理工大学学报·信息与管理工程版 25 168
Jiang M Z, Lin C S 2003 Journal of WUT (Information & Management Engineering)
25 168 [9] 隗燕琳, 陈敬超, 李贵乙, 王彦东, 曾小军 2017 计算机测量与控制 25 213
Wei Y L, Chen J C, Li G Y, Wang Y D, Zeng X J 2017 Computer Measurement & Control 25 213
[10] 林春生, 龚沈光 2007 舰船物理场(北京: 兵器工业出版社) p233
Lin C S, Gong S G 2007 Ships Physical Fields (Beijing: The Publishing House of Ordnance Industry) p233 (in Chinese)
[11] 戴忠华, 周穗华, 单珊 2018 电子学报 46 1524
Google Scholar
Dai Z H, Zhou S H, Shan S 2018 Acta Electronica Sinica 46 1524
Google Scholar
[12] 吴志东, 周穗华, 郭虎生 2013 武汉理工大学学报 35 67
Google Scholar
Wu Z D, Zhou S H, Guo H S 2013 Journal of Wuhan University of Technology 35 67
Google Scholar
[13] Alqadah H F, Valdivia N P, Williams E G 2016 Progress In Electromagnetics Research B 65 109
Google Scholar
[14] Chadebec O, Coulomb J L, Bongiraud J P, Cauffet G, Thiec P L 2002 IEEE Trans. Magn. 38 1005
Google Scholar
[15] Chadebec O, Couloumb J L, Cauffet G, Bongiraud J P 2003 IEEE Trans. Magn. 39 1634
Google Scholar
[16] Vuillermet Y, Chadebec O, Coulomb J L, Rouve L L, Cauffet G, Bongiraud J P, Demilier L 2008 IEEE Trans. Magn. 44 1054
Google Scholar
[17] Yang C S, Lee K J, Jung G, Chung H J, Park J S, Kim D H 2008 J. Appl. Phys. 103 07D905
Google Scholar
[18] 郭成豹, 肖昌汉, 刘大明 2008 物理学报 57 4182
Google Scholar
Guo C B, Xiao C H, Liu D M 2008 Acta Phys. Sin. 57 4182
Google Scholar
[19] Dirac P A M 1931 Proc. Roy. Soc. A 133 60
Google Scholar
[20] Dirac P A M 1948 Phys. Rev. 74 817
Google Scholar
[21] Tikhonov A N, Arsenin V Y 1977 Math. Comput. 32 491
[22] Hansen P C, O'Leary D P 1993 SIAM J. Sci. Comput. 14 1487
Google Scholar
[23] 郭成豹, 周炜昶 2017 兵工学报 38 1988
Google Scholar
Guo C B, Zhou W C 2017 Acta Armamentarii 38 1988
Google Scholar
[24] 郭成豹, 刘大明 2012 兵工学报 33 912
Guo C B, Liu D M 2012 Acta Armamentarii 33 912
[25] 郭成豹, 刘大明 2014 兵工学报 35 1638
Google Scholar
Guo C B, Liu D M 2014 Acta Armamentarii 35 1638
Google Scholar
[26] Chadebec O, Coulomb J, Janet F 2006 IEEE Trans. Magn. 42 515
Google Scholar
[27] Morandi A, Fabbri M, Ribani P L 2010 IEEE Trans. Magn. 46 3848
Google Scholar
[28] Zhao K Z, Vouvakis M N, Lee J F 2005 IEEE Trans. Electromagn. Compat. 47 763
Google Scholar
-
图 2 铁磁舰船航行通过一个磁传感器线阵
Fig. 2. Ferromagnetic ship runs over a line array of magnetic sensors.
图 3 铁磁舰船及其下方的虚拟磁传感器长方形阵列
Fig. 3. Ferromagnetic ship stands over a virtual array of magnetic sensors.

图 7 舰船磁场预测值和测量值的对比
Fig. 7. Comparison of predicted and measured values of ship's magnetic field.
图 8 吃水线水平面上的长方形磁单极子阵列
Fig. 8. Rectangular magnetic monopole array on the horizontal surface of the draft line.
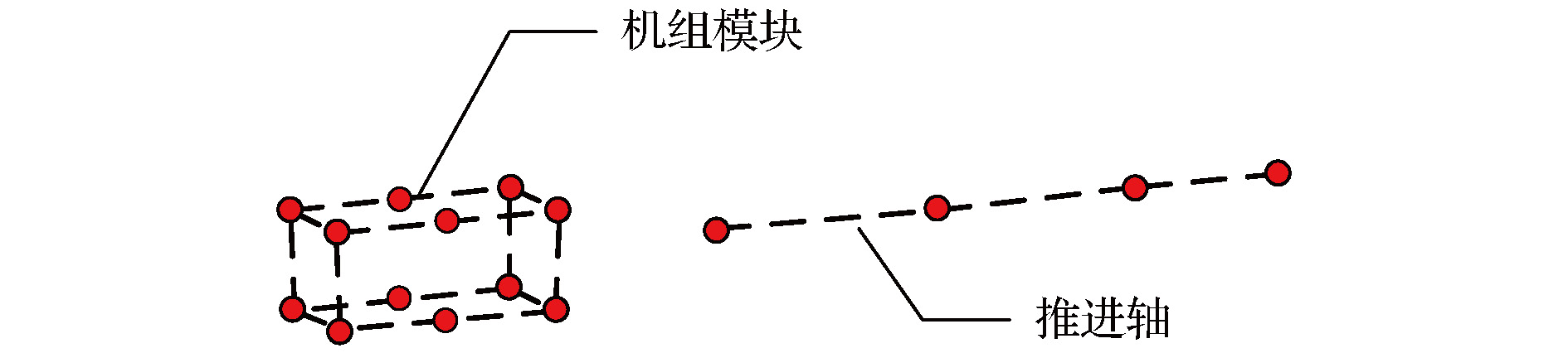
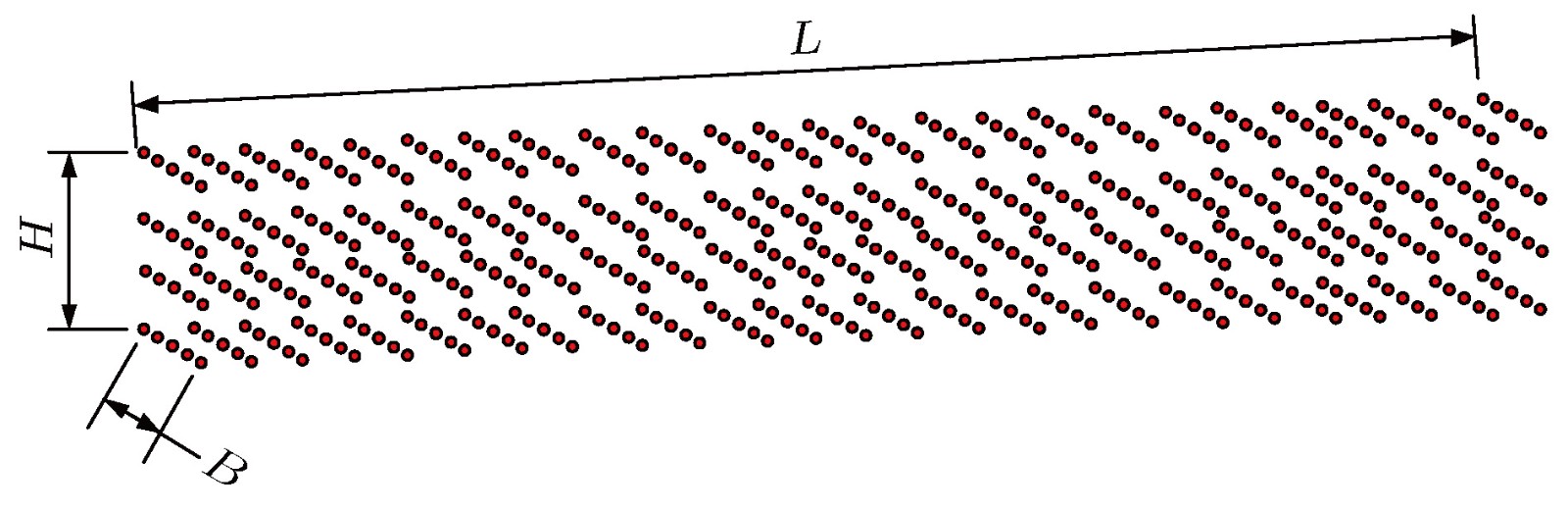
图 10 按照船体铁磁结构分布的三维船体磁单极子阵列
Fig. 10. Three-dimensional ship magnetic monopole array distributed according to the ferromagnetic structure of the ship hull.

图 11 舰船磁场测量点分布俯视图
Fig. 11. Top view of the distribution of magnetic field measurement points on ship.
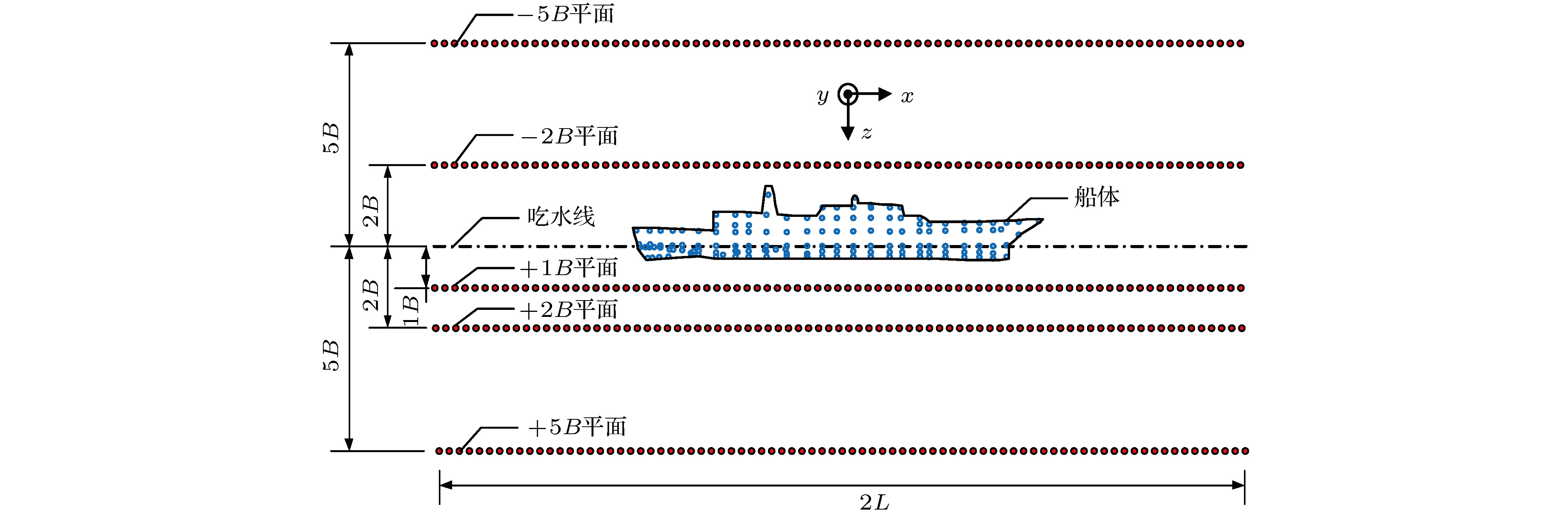
图 12 舰船磁场测量点分布侧视图
Fig. 12. Side view of distribution of magnetic field measurement points on ship.
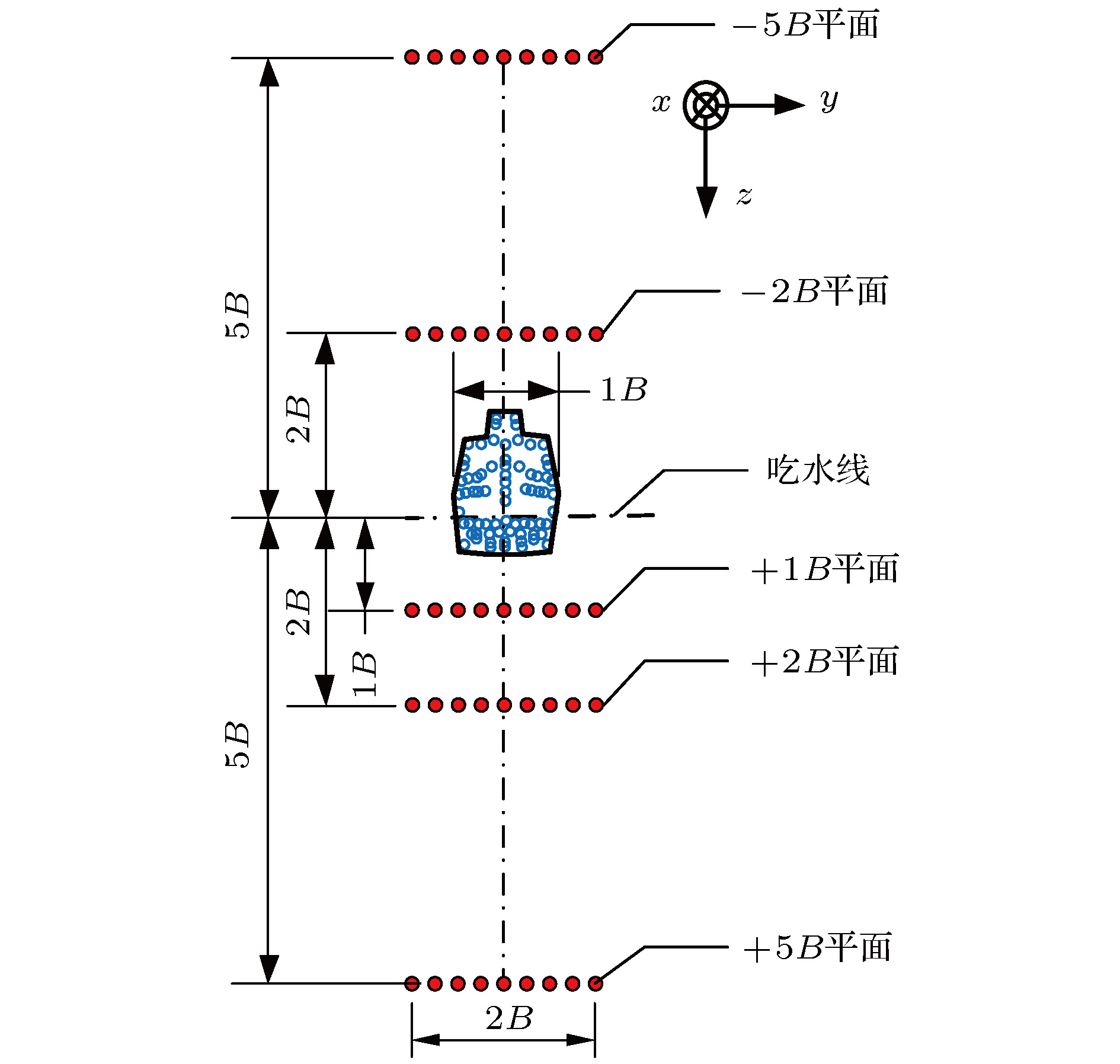
图 13 舰船磁场测量点分布后视图
Fig. 13. Rear view of the distribution of magnetic field measurement points on ship.
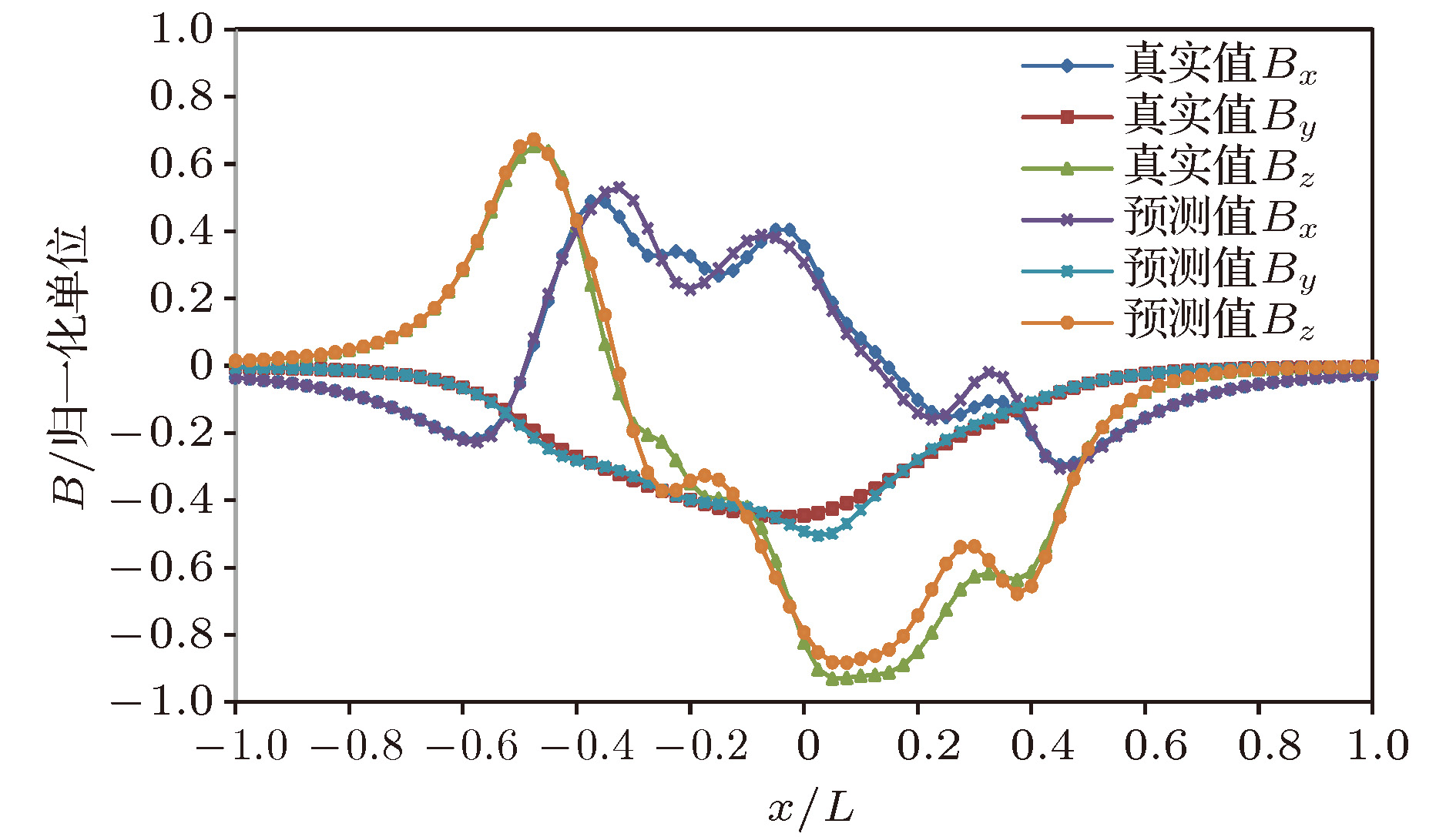
图 14 +1B深度典型测量点线上的舰船磁场预测值和真实值对比
Fig. 14. Comparison of predicted and real values of ship's magnetic field on typical measuring point line in +1B depth.
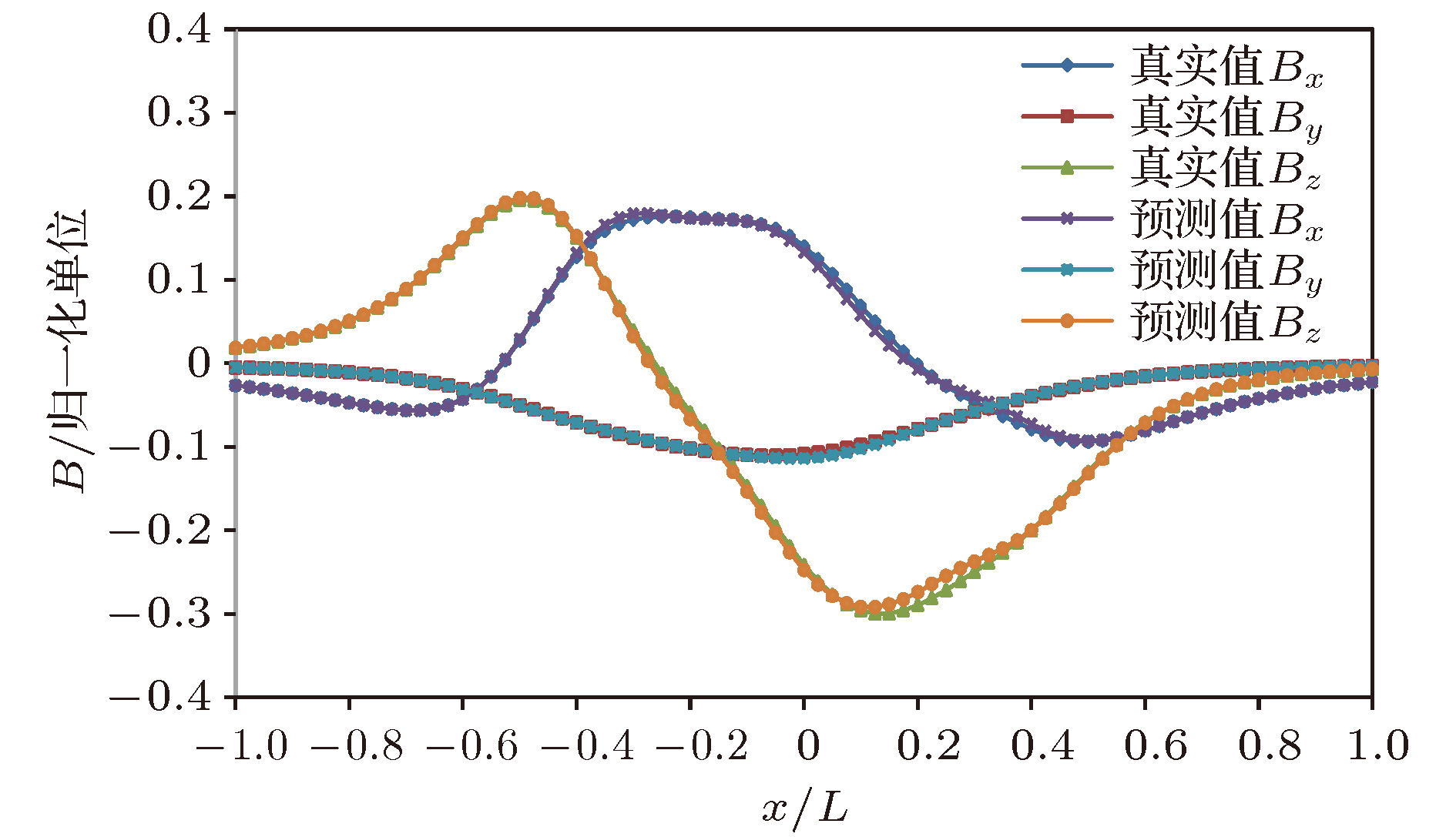
图 15 +2B深度典型测量点线上的舰船磁场预测值和真实值对比
Fig. 15. Comparison of predicted and real values of ship's magnetic field on typical measuring point line in +2B depth.
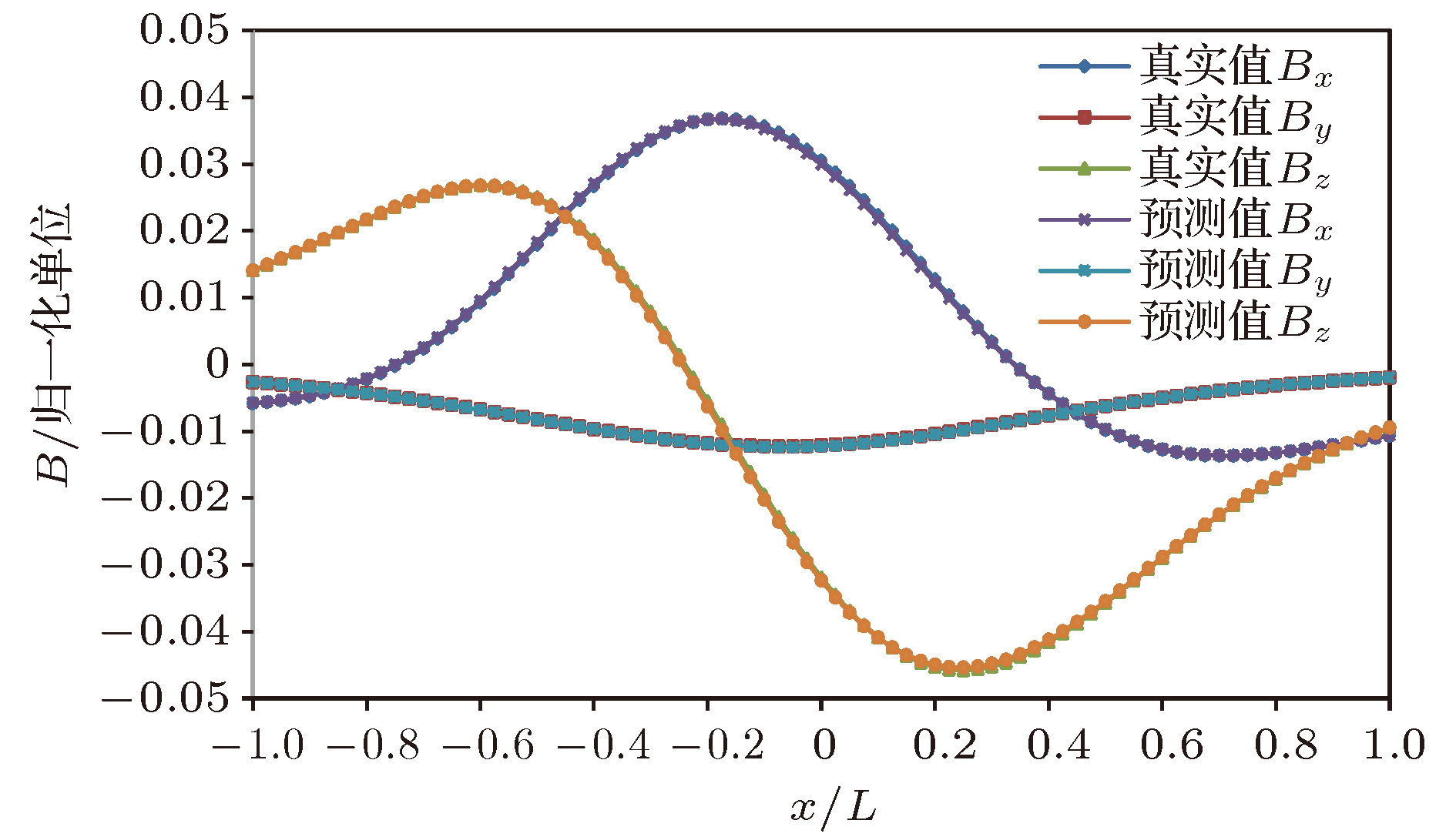
图 16 +5B深度典型测量点线上的舰船磁场预测值和真实值对比
Fig. 16. Comparison of predicted and real values of ship's magnetic field on typical measuring point line in +5B depth.
表 1 验证试验的计算结果
Table 1. Results of the validation test.
测量深度 阵列形式 正则化参数$\alpha$ 相对残差/% 相对误差/% +1B +2B +5B –2B –5B +1B 长方形 0.1323 4.65 4.56 8.25 28.23 95.00 101.76 长方体 0.0069 0.08 0.08 0.03 0.24 8.50 3.65 三维船体 0.0030 0.05 0.04 0.01 0.03 5.49 0.50 +2B 长方形 0.0177 2.15 13.28 2.14 10.03 91.06 85.98 长方体 0.0026 0.09 1.23 0.02 0.09 16.30 3.64 三维船体 0.0020 0.09 0.65 0.01 0.03 7.05 1.64 +5B 长方形 0.0190 3.64 34.51 19.15 3.62 80.15 78.21 长方体 0.0028 0.50 11.07 2.28 0.07 25.99 11.68 三维船体 0.0021 0.49 5.55 0.94 0.04 17.13 3.12 –2B 长方形 0.0020 1.54 190.80 114.68 92.25 1.54 6.62 长方体 0.0024 0.08 15.43 5.65 2.41 0.03 0.05 三维船体 0.0026 0.11 10.20 3.63 1.25 0.08 0.05 –5B 长方形 0.0216 4.39 90.31 86.81 86.29 29.79 4.39 长方体 0.0034 0.46 29.81 20.97 16.42 7.01 0.11 三维船体 0.0021 0.44 15.36 8.99 5.18 3.51 0.06  下载: 导出CSV
下载: 导出CSV
-
[1] Holmes J J 2007 Modeling A Ship’s Ferromagnetic Signatures (Maryland: Morgan & Claypool Publishers) p3
[2] Holmes J J 2008 Reduction of a Ship’s Magnetic Field Signatures (Maryland: Morgan & Claypool Publishers) p8
[3] Nixon D A, Baker F E 1981 J. Appl. Phys. 52 539
Google Scholar
[4] Kildishev A V, Nyenhuis J A, Morgan M A 2002 IEEE Trans. Magn. 38 2465
Google Scholar
[5] 陈杰, 鲁习文 2009 物理学报 58 3839
Google Scholar
Chen J, Lu X W 2009 Acta Phys. Sin. 58 3839
Google Scholar
[6] Synnes S A 2008 IEEE Trans. Magn. 44 2277
Google Scholar
[7] Kamondetdacha R, Kildishev A V, Nyenhuis J A 2004 IE
EE Trans. Magn. 40 2176 Google Scholar
[8] 蒋敏志,林春生 2003 武汉理工大学学报·信息与管理工程版 25 168
Jiang M Z, Lin C S 2003 Journal of WUT (Information & Management Engineering)
25 168 [9] 隗燕琳, 陈敬超, 李贵乙, 王彦东, 曾小军 2017 计算机测量与控制 25 213
Wei Y L, Chen J C, Li G Y, Wang Y D, Zeng X J 2017 Computer Measurement & Control 25 213
[10] 林春生, 龚沈光 2007 舰船物理场(北京: 兵器工业出版社) p233
Lin C S, Gong S G 2007 Ships Physical Fields (Beijing: The Publishing House of Ordnance Industry) p233 (in Chinese)
[11] 戴忠华, 周穗华, 单珊 2018 电子学报 46 1524
Google Scholar
Dai Z H, Zhou S H, Shan S 2018 Acta Electronica Sinica 46 1524
Google Scholar
[12] 吴志东, 周穗华, 郭虎生 2013 武汉理工大学学报 35 67
Google Scholar
Wu Z D, Zhou S H, Guo H S 2013 Journal of Wuhan University of Technology 35 67
Google Scholar
[13] Alqadah H F, Valdivia N P, Williams E G 2016 Progress In Electromagnetics Research B 65 109
Google Scholar
[14] Chadebec O, Coulomb J L, Bongiraud J P, Cauffet G, Thiec P L 2002 IEEE Trans. Magn. 38 1005
Google Scholar
[15] Chadebec O, Couloumb J L, Cauffet G, Bongiraud J P 2003 IEEE Trans. Magn. 39 1634
Google Scholar
[16] Vuillermet Y, Chadebec O, Coulomb J L, Rouve L L, Cauffet G, Bongiraud J P, Demilier L 2008 IEEE Trans. Magn. 44 1054
Google Scholar
[17] Yang C S, Lee K J, Jung G, Chung H J, Park J S, Kim D H 2008 J. Appl. Phys. 103 07D905
Google Scholar
[18] 郭成豹, 肖昌汉, 刘大明 2008 物理学报 57 4182
Google Scholar
Guo C B, Xiao C H, Liu D M 2008 Acta Phys. Sin. 57 4182
Google Scholar
[19] Dirac P A M 1931 Proc. Roy. Soc. A 133 60
Google Scholar
[20] Dirac P A M 1948 Phys. Rev. 74 817
Google Scholar
[21] Tikhonov A N, Arsenin V Y 1977 Math. Comput. 32 491
[22] Hansen P C, O'Leary D P 1993 SIAM J. Sci. Comput. 14 1487
Google Scholar
[23] 郭成豹, 周炜昶 2017 兵工学报 38 1988
Google Scholar
Guo C B, Zhou W C 2017 Acta Armamentarii 38 1988
Google Scholar
[24] 郭成豹, 刘大明 2012 兵工学报 33 912
Guo C B, Liu D M 2012 Acta Armamentarii 33 912
[25] 郭成豹, 刘大明 2014 兵工学报 35 1638
Google Scholar
Guo C B, Liu D M 2014 Acta Armamentarii 35 1638
Google Scholar
[26] Chadebec O, Coulomb J, Janet F 2006 IEEE Trans. Magn. 42 515
Google Scholar
[27] Morandi A, Fabbri M, Ribani P L 2010 IEEE Trans. Magn. 46 3848
Google Scholar
[28] Zhao K Z, Vouvakis M N, Lee J F 2005 IEEE Trans. Electromagn. Compat. 47 763
Google Scholar

 下载:
下载:

计量
- 文章访问数: 15121
- PDF下载量: 118
- 被引次数: 0
