










-
利用多物理场耦合有限元法对结构和流体适应性强、抛物方程声场计算高效准确的特点, 提出了三维浅海波导下弹性结构声振特性研究的有限元-抛物方程法. 该方法采用多物理场耦合有限元理论建立浅海下结构近场声辐射模型, 计算局域波导下结构声振信息, 并提取深度方向上复声压值作为抛物方程初始值; 然后采用隐式差分法求解抛物方程以步进计算结构辐射声场. 重点介绍了该方法对浅海下结构声辐射计算的准确性、高效性以及快速收敛性后, 对Pekeris波导中有限长弹性圆柱壳的声振特性进行了分析. 研究得出, 当圆柱壳靠近海面(海底)时, 其耦合频率比自由场下的要高(低), 当潜深达到一定范围时, 与自由场耦合频率基本趋于一致; 在低频远场, 结构辐射场与同强度点源声场具有一定的等效性, 且等效距离随着频率增加而增加; 由于辐射声场受结构振动模态、几何尺寸和简正波模式影响, 结构辐射场传播的衰减规律按近场声影响区、球面波衰减区、介于球面波和柱面波衰减区、柱面波衰减区四个扩展区依次进行.It can be a difficult problem to precisely predict the acoustic field radiated from a finite elastic structure in shallow water channel because of its strong coupling with up-down boundaries and the fluid medium, whose acoustic field cannot be calculated directly by existing methods, such as Ray theory, normal mode theory and other different methods, which are adaptable to sound fields from idealized point sources in waveguide. So, there is no reliable research method of predicting the acoustic radiation of elastic structure in shallow water at present. Based on the finite element method (FEM) coupled with the parabolic equation (PE), the theoretical model for structure acoustic radiation in shallow water at low frequency is established in this paper. This model mainly consists of three sections. First, obtaining the near-field vibro-acoustic characteristics of the elastic structure in shallow water by the multi-physics coupling model established by FEM, whose FEM model includes the up-down boundaries and the completely absorbent sound boundaries in the horizontal direction. Second, getting the acoustic information in the depth, which is set as the acoustic input condition i.e. starting field for the PE. Third, the acoustic information in the far-field quickly calculated by the PE and the finite difference method (FDM). The accuracy, efficiency and fast convergence of FEM-PE method are validated by numerical simulation and theoretical analysis through using a monopole source and structural source in the Pekeris waveguide, respectively. The vibro-acoustic characteristics of elastic cylinder influenced by upper and lower fluid boundaries of the Pekeris waveguide are calculated and analyzed. The cylindrical shell material is steel, and it is 1 m in radius and 10 m in length. The shallow water channel is a Pekeris waveguide with 30 m in depth, at the upper boundary, i.e., the free surface, the lower boundary is the semi-infinite liquid boundary. The analyzed frequencies range from 50 Hz to 200 Hz. The study shows that when the cylindrical shell approaches to the sea surface or bottom, the coupled frequency is higher or lower respectively than that of the shell immersed in the free field. When the diving depth reaches a certain distance range, the coupled frequency tends to be the same as that in free field. The acoustic field radiated from an elastic shell in Pekeris waveguide is similar to that from a point source at low frequency, but there exists a significant difference in high frequency between them, so the structural source can be equivalent to a point source conditionally. The sound radiation attenuation of the structure happens in sequence according to the near-field acoustic shadow zone, the spherical wave attenuation zone, the region between spherical wave and the cylindrical wave attenuation zone, and the cylindrical wave attenuation zone.
-
Keywords:
- shallow water /
- finite cylindrical shell /
- finite element-parabolic equation method /
- vibro-acoustic characteristics
[1] Junger M C, Feit D 1972 Sound, Structures, and Their Interaction (2th Ed.) (Massachusetts: MIT Press) pp279−309
[2] Sandberg G, Ohayon R 2009 Computational Aspects of Structural Acoustics and Vibration (New York: Springer Press) pp23−103
[3] Skelton E A, James J H 1997 Theoretical Acoustics of Underwater Structures (London: Imperial College Press) pp241−278
[4] Ho J 1994 J. Acoust Soc. Am. 96 525
 Google Scholar
Google Scholar
[5] Amabili M, Dalpiaz G 1995 J. Vib. Acoust. 117 187
Google Scholar
[6] 潘汉军, 李加庆, 陈进, 张桂才, 刘先锋 2006 中国机械工程 177 33
Google Scholar
Pan H J, Li J Q, Chen J, Zhang G C, Liu X F 2006 China Mech. Eng. 177 33
Google Scholar
[7] 叶文兵, 李天匀, 朱翔, 陈忱 2013 船舶力学 3 313
Ye W B, Li T Y, Zhu X, Chen C 2013 J. Shi. Mech. 3 313
[8] Skidan O, Klosner J M, Baron M L 1974 J. Acoust. Soc. Am. 56 427
Google Scholar
[9] Li W L, Wu T W, Seybert A F 1994 J. Sound Vib. 171 173
Google Scholar
[10] 郭文杰, 李天匀, 朱翔, 屈凯旸 2018 物理学报 67 084302
Google Scholar
Guo W J, Li T Y, Qu K Y 2018 Acta Phys. Sin. 67 084302
Google Scholar
[11] Brunner D, Of G, Junge M 2010 Int. J. Num. Methods Eng. 81 28
[12] Soni S, Jain N K, Joshi P V 2018 J. Sound Vib. 412 28
Google Scholar
[13] Ergin A, Price W G, Randall R, Temarel P 1992 J. Ship Res. 36 154
[14] 白振国, 吴文伟, 左成魁, 张峰, 熊晨熙 2014 船舶力学 Z1 178
Google Scholar
Bai Z G, Wu W W, Zuo C K, Zhang F, Xiong C X 2014 J. Shi. Mech. Z1 178
Google Scholar
[15] Wang P, Li T Y, Zhu X 2017 Ocean Eng. 142 280
Google Scholar
[16] Sarkissian A 1994 J. Acoust. Soc. Am. 95 2340
Google Scholar
[17] 商德江, 钱治文, 何元安, 肖妍 2018 物理学报 67 084301
Shang D J, Qian Z W, He Y A, Xiao Y 2018 Acta Phys. Sin. 67 084301
[18] Zou M S, Wu Y S, Liu Y M, Lin C G 2013 J. Hydrodyn. 25 929
Google Scholar
[19] Jiang L W, Zou M S, Huang H, Feng X L 2018 JASA Express Lett. 43 EL430
[20] Jensen F B, Kuperman W A, Porter M B, Schmidt H 2011 Computational Ocean Acoustics (2th Ed.) (New York: Springer) pp457−527
[21] 秦继兴, Boris K, 彭朝晖, 李整林, 张仁和, 骆文于 2016 物理学报 65 034301
Google Scholar
Qin J X, Boris K, Peng Z H, Li Z L, Zhang R H, Luo W Y 2016 Acta Phys. Sin. 65 034301
Google Scholar
[22] Luo W Y, Yu X L, Yang X F, Zhang Z Z, Zhang R H 2016 Chin. Phys. B 25 124309
[23] Xu C X, Tang J, Piao S C, Liu J Q, Zhang S Z 2016 Chin. Phys. B 12 124315
[24] Collins M D, Evans R B 1992 J. Acoust. Soc. Am. 91 1357
Google Scholar
[25] Collins M D 1993 J. Acoust. Soc. Am. 93 1815
Google Scholar
[26] Collins M D, Siegmann W L 2015 J. Acoust. Soc. Am. 137 492
Google Scholar
[27] Yevick D, Thomson D J 2000 J. Acoust. Soc. Am. 107 1226
Google Scholar
[28] Tang J, Piao S C, Zhang H G 2017 Chin. Phys. B 26 269
[29] Isakson M J, Goldsberry B, Chotiros N P 2014 J. Acoust. Soc. Am. 136 EL206
Google Scholar
[30] Wu H T, Chen P T 2017 J. Marine Sci. Technol. 25 96
[31] Marburg S, Nolte B 2008 Computational Acoustics of Noise Propagation in Fluids: Finite and Boundary Element Methods (New York: Acoustics Springer) pp166–178
[32] Pappert F D 1977 The Parabolic Approximation Method// Wave Propagation and Underwater Acoustics (New York: Springer) pp224–287
[33] Lee D, Mcdaniel S T 1987 Ocean Acoustic Propagation by Finite Difference Methods (New York: Pergamon) pp313−316
[34] Collins M D 1989 J. Acoust. Soc. Am. 86 1459
Google Scholar
[35] Brekhovskikh L M, Lysanov Y P 2004 Fundamentals of Ocean Acoustics (3th Ed.) (New York: Springer) pp102–116
[36] 何祚镛, 赵玉芳 1981 声学理论基础(北京: 国防工业出版社) 第194−307页
He Z Y, Zhao Y F 1981 Theories of Acoustics (Beijing: National Defense Industry Press) pp194−307 (in Chinese)
-

图 4 点源的FEM-PE理论验证 (a) f = 30 Hz; (b) f = 300 Hz
Fig. 4. Verification of point source used FEM-PE: (a) f = 30 Hz; (b) f = 300 Hz.

图 5 浅海下弹性球壳声辐射有限元模型示意图
Fig. 5. FEM model diagram of elastic spherical shell in shallow water.

图 6 弹性球壳的FEM-PE理论验证 (a) f = 30 Hz; (b) f = 300 Hz
Fig. 6. Verification of elastic sphere used FEM-PE: (a) f = 30 Hz; (b) f = 300 Hz.
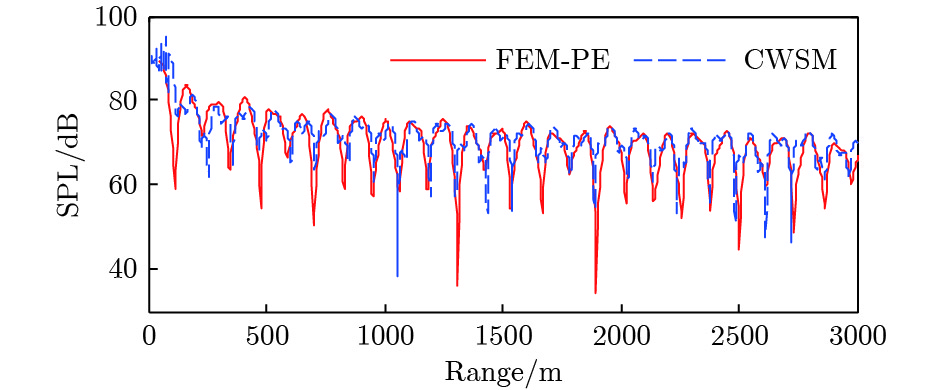
图 7 60 Hz频率下FEM-PE与CWSM计算结果对比
Fig. 7. Contrast between method of FEM-PE and CWSM at 60 Hz.
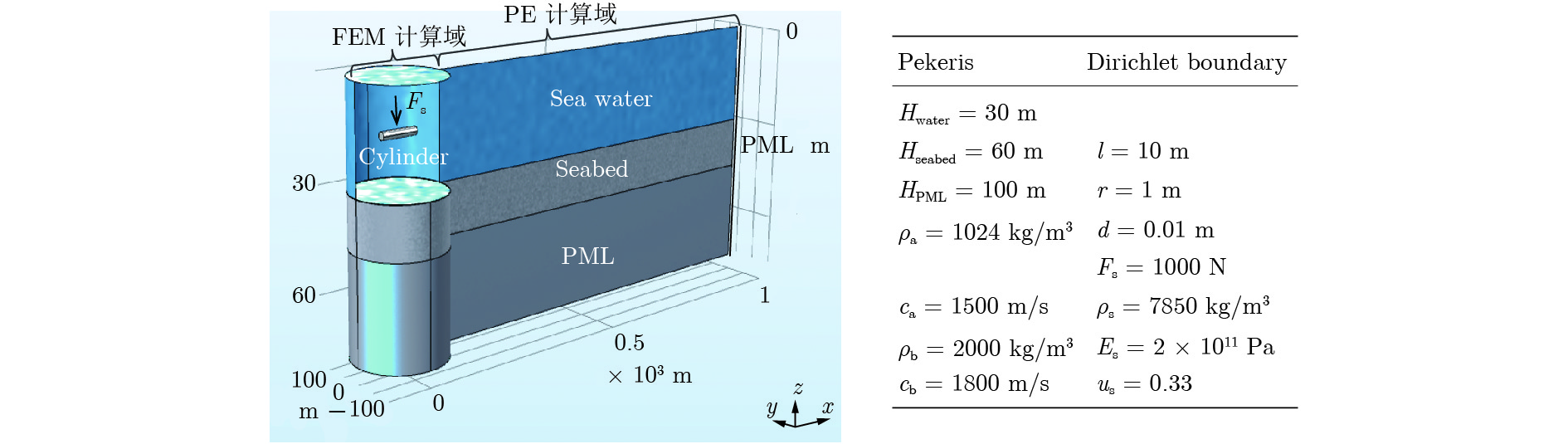
图 8 浅海波导下圆柱壳声辐射FEM-PE预报模型
Fig. 8. Model of cylindrical sound radiation used FEM-PE in shallow water.
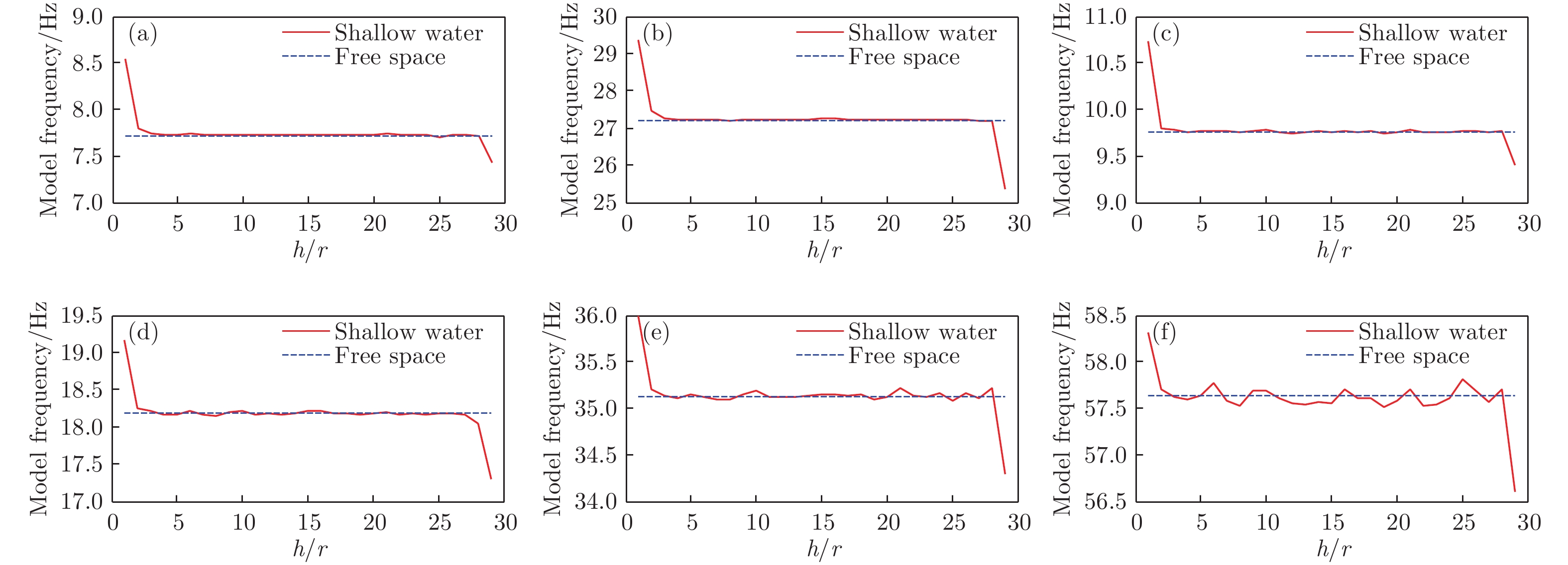
图 9 耦合模态随潜深的变化曲线 (a) (4, 1); (b) (4, 2); (c) (6, 1); (d) (6, 2); (e) (6, 3); (f) (6, 4)
Fig. 9. Curves of coupled modal frequency changed with diving depth: (a) Modal (4, 1); (b) modal (4, 2); (c) modal (6, 1); (d) modal (6, 2); (e) modal (6, 3); (f) modal (6, 4).
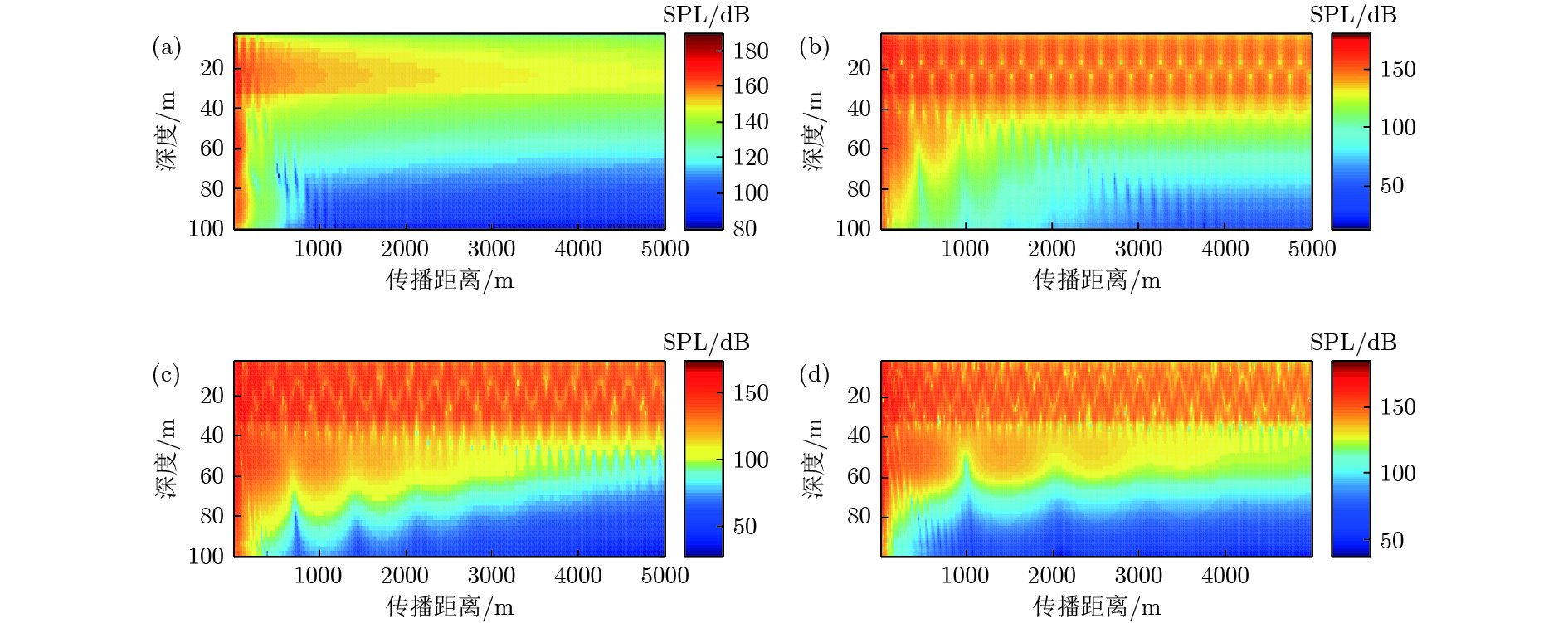
图 10 不同频率下结构声场传播伪彩图 (a) f = 50 Hz; (b) f = 100 Hz; (c) f=150 Hz; (d) f = 200 Hz
Fig. 10. Colour maps of structural sound propagation at different frequencies: (a) f = 50 Hz; (b) f = 100 Hz; (c) f = 150 Hz; (d) f = 200 Hz.

图 11 不同频率下结构辐射声场与点源声场对比 (a) f = 50 Hz; (b) f = 100 Hz; (c)f = 150 Hz; (d) f = 200 Hz
Fig. 11. Acoustic propagation contrast between structure and point souce at different frequencies: (a) f = 50 Hz; (b) f = 100 Hz; (c) f = 150 Hz; (d) f = 200 Hz.
图 12 不同频率下结构辐射场传播特性分析 (a) f = 50 Hz; (b) f = 100 Hz; (c) f = 150 Hz; (d) f = 200 Hz
Fig. 12. Analysis of structural sound propagation at different frequencies: (a) f = 50 Hz; (b) f = 100 Hz; (c) f = 150 Hz; (d) f = 200 Hz.
表 1 方法收敛性分析
Table 1. Convergence analysis of the method.
FEM $\scriptstyle {d_{\rm FEM}}$ $\scriptstyle \lambda $ $\frac{\lambda }{2}$ $\frac{\lambda }{4}$ $\frac{\lambda }{6}$ $\frac{\lambda }{8}$ $\frac{\lambda }{{10}}$ $\frac{\lambda }{6}$ PE $\scriptstyle {d_z}$ $\frac{\lambda }{8}$ $\scriptstyle \lambda $ $\frac{\lambda }{2}$ $\frac{\lambda }{4}$ $\frac{\lambda }{8}$ $\frac{\lambda }{{16}}$ $\scriptstyle {d_r}=2{d_z}$ $\frac{\lambda }{4}$ $\scriptstyle 2\lambda $ $\scriptstyle \lambda $ $\frac{\lambda }{2}$ $\frac{\lambda }{4}$ $\frac{\lambda }{8}$ $\scriptstyle \varpi $/% 11.6 6.8 4.2 3.3 3.4 3.5 13.8 11.2 7.8 3.3 3.5 DOF/$\scriptstyle \times {10^4}$ 2.2 3.4 7.2 13.1 20.9 40.9 11.5 11.6 11.9 13.1 17. 7 RAM/GB 1.9 2.0 1.9 2.0 2.2 2.5 2.0 2.0 2.0 2.0 2.1 t/s 2.3 4.5 7.5 12.4 17.3 21.9 11.5 11.6 11. 7 12.4 14.1  下载: 导出CSV
下载: 导出CSV
表 2 运行时间对比测试 (单位: min)
Table 2. The contrast test of runtime between FEM-PE and CWSM (unit: min).
l/km $\scriptstyle \lambda-5$ $\scriptstyle \lambda-1$ $\scriptstyle \lambda-10$ $\scriptstyle \lambda-50$ $\scriptstyle \lambda-100$ f/Hz 30 60 90 100 60 t CWSM 24.62 40.47 62.00 68.78 27.97 98.98 189.57 276.68 FEM-PE 2.20 4.18 7.21 9.45 2.17 5.98 11.60 18.76 $\textstyle {\eta _{\rm CWSM/FEM {\text{-}} PE}}$ 11 : 1 10 : 1 9 : 1 8 : 1 14 : 1 17 : 1 16 : 1 14 : 1 注: $\textstyle {\eta _{\rm CWSM/FEM{\text{-}}PE}}$为两种方法时间比值, FEM-PE网格为$\scriptstyle {d_{\rm FEM}}=\lambda /6$, $\scriptstyle {d_z}=\lambda /8$及$\scriptstyle {d_r}=\lambda /4$.
下载: 导出CSV
表 3 不同流体环境下圆柱壳耦合模态频率(单位: Hz)
Table 3. Comparison of coupled modal frequency in different fluid environments (unit: Hz).
Environment  (4, 1)
(4, 1) (4, 2)
(4, 2) (6, 1)
(6, 1) (6, 2)
(6, 2) (6, 3)
(6, 3) (6, 4)
(6, 4)Free field 7.72 27.18 9.75 18. 19 35.12 57.63 Half-space 7.83 27.53 9.87 18.41 35.62 58.18 Pekeris 7.80 27.42 9.80 18.26 35.26 57.71
下载: 导出CSV
表 4 Pekeris波导中各阶简正波频率
Table 4. Normal mode frequencies in Pekeris waveguide.
n 1 2 3 4 5 6 f/Hz 35.52 106.56 177.60 248.65 319.69 390.73
下载: 导出CSV
-
[1] Junger M C, Feit D 1972 Sound, Structures, and Their Interaction (2th Ed.) (Massachusetts: MIT Press) pp279−309
[2] Sandberg G, Ohayon R 2009 Computational Aspects of Structural Acoustics and Vibration (New York: Springer Press) pp23−103
[3] Skelton E A, James J H 1997 Theoretical Acoustics of Underwater Structures (London: Imperial College Press) pp241−278
[4] Ho J 1994 J. Acoust Soc. Am. 96 525
Google Scholar
[5] Amabili M, Dalpiaz G 1995 J. Vib. Acoust. 117 187
Google Scholar
[6] 潘汉军, 李加庆, 陈进, 张桂才, 刘先锋 2006 中国机械工程 177 33
Google Scholar
Pan H J, Li J Q, Chen J, Zhang G C, Liu X F 2006 China Mech. Eng. 177 33
Google Scholar
[7] 叶文兵, 李天匀, 朱翔, 陈忱 2013 船舶力学 3 313
Ye W B, Li T Y, Zhu X, Chen C 2013 J. Shi. Mech. 3 313
[8] Skidan O, Klosner J M, Baron M L 1974 J. Acoust. Soc. Am. 56 427
Google Scholar
[9] Li W L, Wu T W, Seybert A F 1994 J. Sound Vib. 171 173
Google Scholar
[10] 郭文杰, 李天匀, 朱翔, 屈凯旸 2018 物理学报 67 084302
Google Scholar
Guo W J, Li T Y, Qu K Y 2018 Acta Phys. Sin. 67 084302
Google Scholar
[11] Brunner D, Of G, Junge M 2010 Int. J. Num. Methods Eng. 81 28
[12] Soni S, Jain N K, Joshi P V 2018 J. Sound Vib. 412 28
Google Scholar
[13] Ergin A, Price W G, Randall R, Temarel P 1992 J. Ship Res. 36 154
[14] 白振国, 吴文伟, 左成魁, 张峰, 熊晨熙 2014 船舶力学 Z1 178
Google Scholar
Bai Z G, Wu W W, Zuo C K, Zhang F, Xiong C X 2014 J. Shi. Mech. Z1 178
Google Scholar
[15] Wang P, Li T Y, Zhu X 2017 Ocean Eng. 142 280
Google Scholar
[16] Sarkissian A 1994 J. Acoust. Soc. Am. 95 2340
Google Scholar
[17] 商德江, 钱治文, 何元安, 肖妍 2018 物理学报 67 084301
Shang D J, Qian Z W, He Y A, Xiao Y 2018 Acta Phys. Sin. 67 084301
[18] Zou M S, Wu Y S, Liu Y M, Lin C G 2013 J. Hydrodyn. 25 929
Google Scholar
[19] Jiang L W, Zou M S, Huang H, Feng X L 2018 JASA Express Lett. 43 EL430
[20] Jensen F B, Kuperman W A, Porter M B, Schmidt H 2011 Computational Ocean Acoustics (2th Ed.) (New York: Springer) pp457−527
[21] 秦继兴, Boris K, 彭朝晖, 李整林, 张仁和, 骆文于 2016 物理学报 65 034301
Google Scholar
Qin J X, Boris K, Peng Z H, Li Z L, Zhang R H, Luo W Y 2016 Acta Phys. Sin. 65 034301
Google Scholar
[22] Luo W Y, Yu X L, Yang X F, Zhang Z Z, Zhang R H 2016 Chin. Phys. B 25 124309
[23] Xu C X, Tang J, Piao S C, Liu J Q, Zhang S Z 2016 Chin. Phys. B 12 124315
[24] Collins M D, Evans R B 1992 J. Acoust. Soc. Am. 91 1357
Google Scholar
[25] Collins M D 1993 J. Acoust. Soc. Am. 93 1815
Google Scholar
[26] Collins M D, Siegmann W L 2015 J. Acoust. Soc. Am. 137 492
Google Scholar
[27] Yevick D, Thomson D J 2000 J. Acoust. Soc. Am. 107 1226
Google Scholar
[28] Tang J, Piao S C, Zhang H G 2017 Chin. Phys. B 26 269
[29] Isakson M J, Goldsberry B, Chotiros N P 2014 J. Acoust. Soc. Am. 136 EL206
Google Scholar
[30] Wu H T, Chen P T 2017 J. Marine Sci. Technol. 25 96
[31] Marburg S, Nolte B 2008 Computational Acoustics of Noise Propagation in Fluids: Finite and Boundary Element Methods (New York: Acoustics Springer) pp166–178
[32] Pappert F D 1977 The Parabolic Approximation Method// Wave Propagation and Underwater Acoustics (New York: Springer) pp224–287
[33] Lee D, Mcdaniel S T 1987 Ocean Acoustic Propagation by Finite Difference Methods (New York: Pergamon) pp313−316
[34] Collins M D 1989 J. Acoust. Soc. Am. 86 1459
Google Scholar
[35] Brekhovskikh L M, Lysanov Y P 2004 Fundamentals of Ocean Acoustics (3th Ed.) (New York: Springer) pp102–116
[36] 何祚镛, 赵玉芳 1981 声学理论基础(北京: 国防工业出版社) 第194−307页
He Z Y, Zhao Y F 1981 Theories of Acoustics (Beijing: National Defense Industry Press) pp194−307 (in Chinese)

 下载:
下载:

计量
- 文章访问数: 12601
- PDF下载量: 101
- 被引次数: 0
