










-
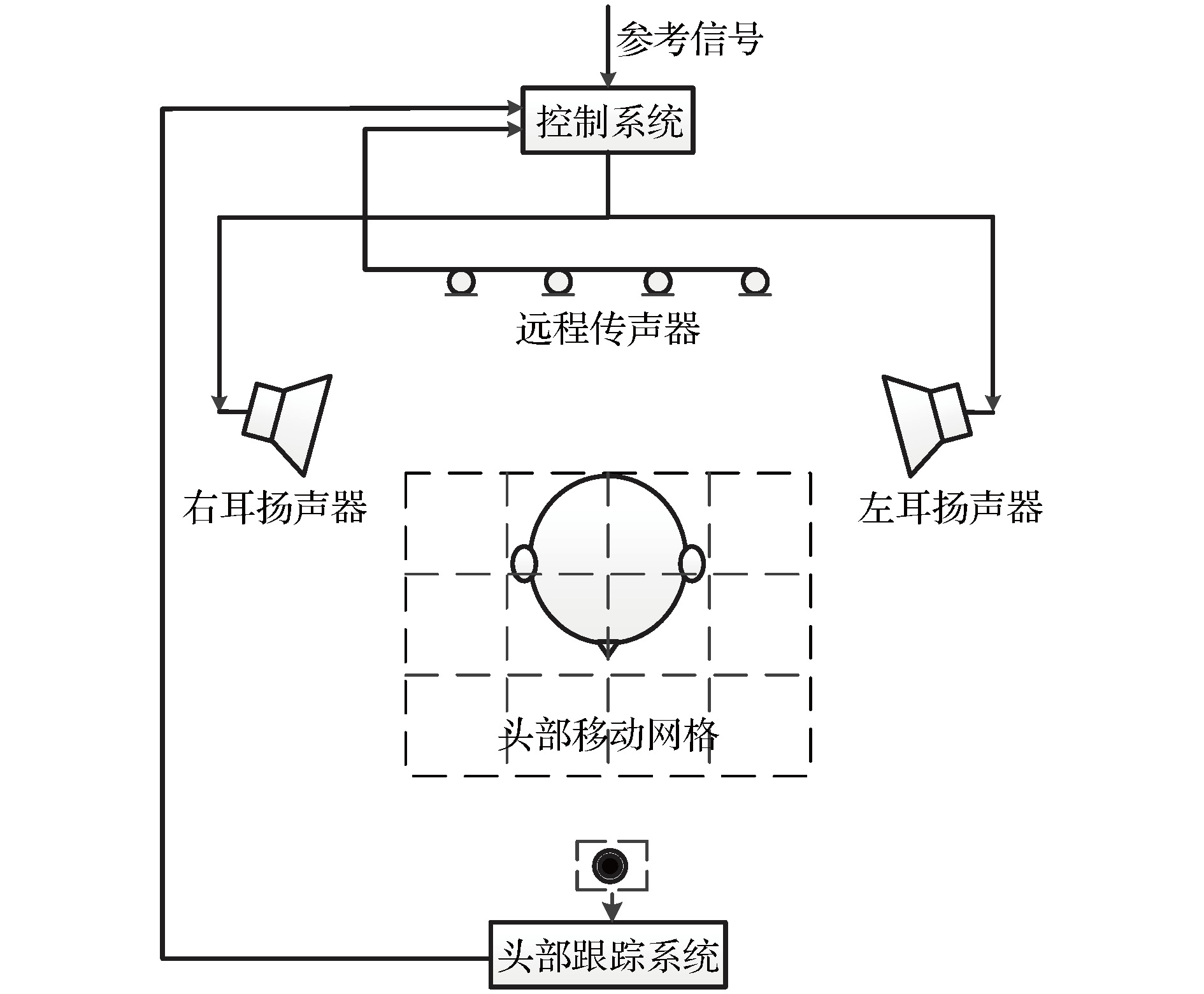
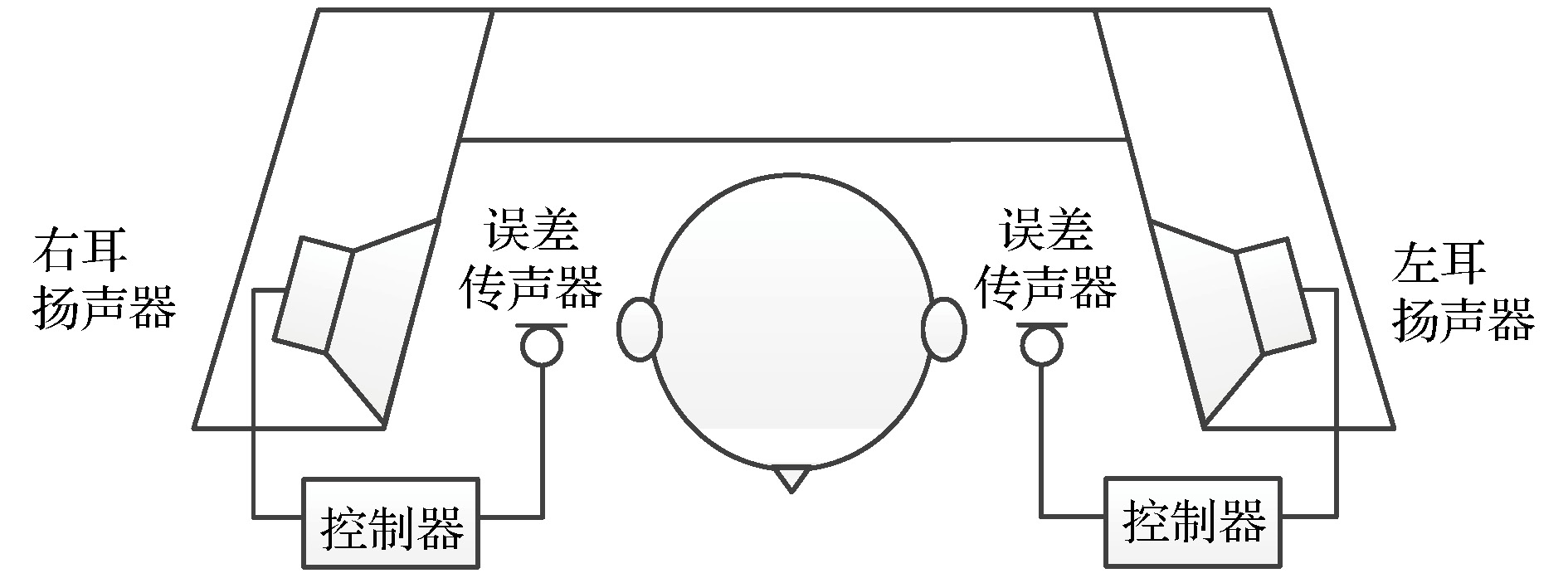
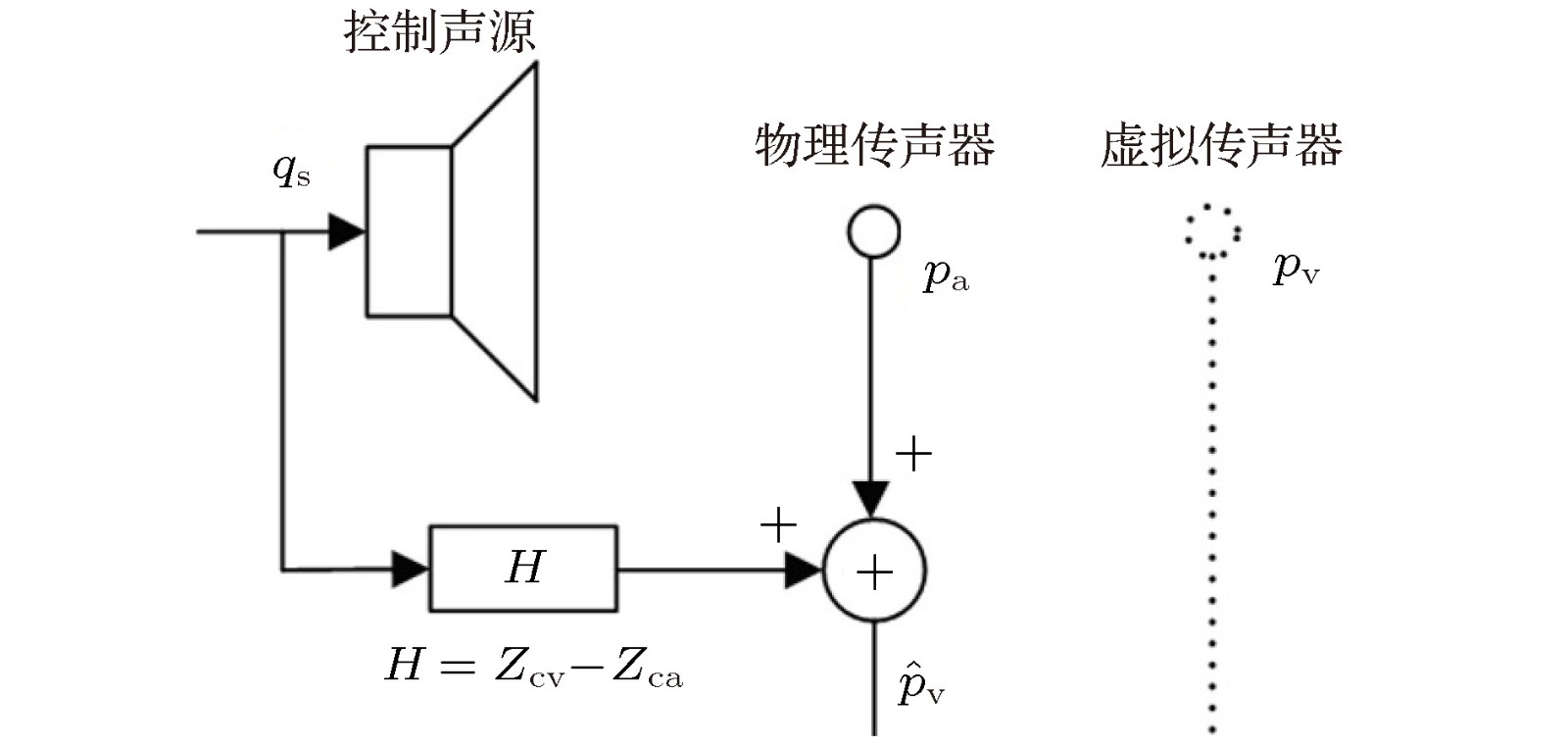
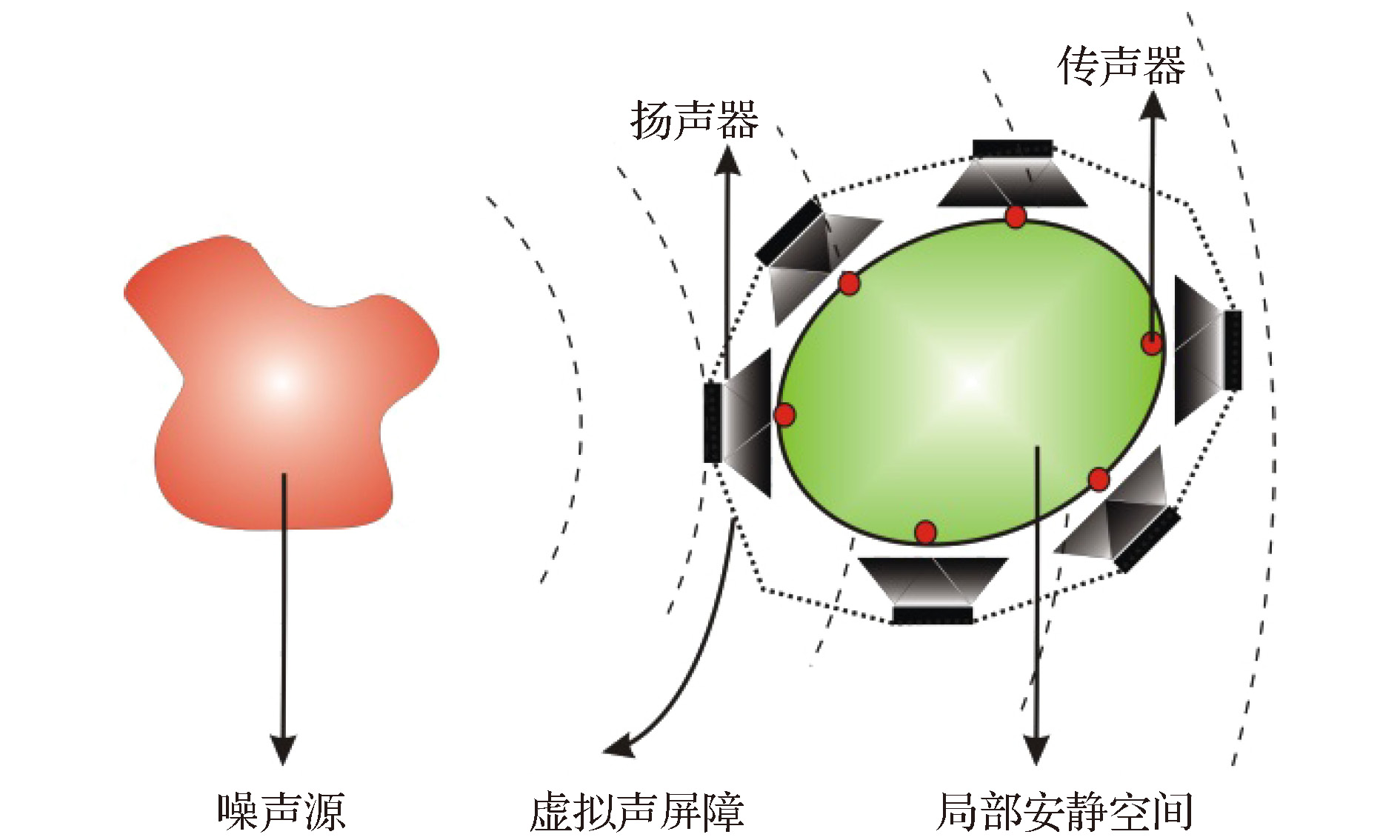
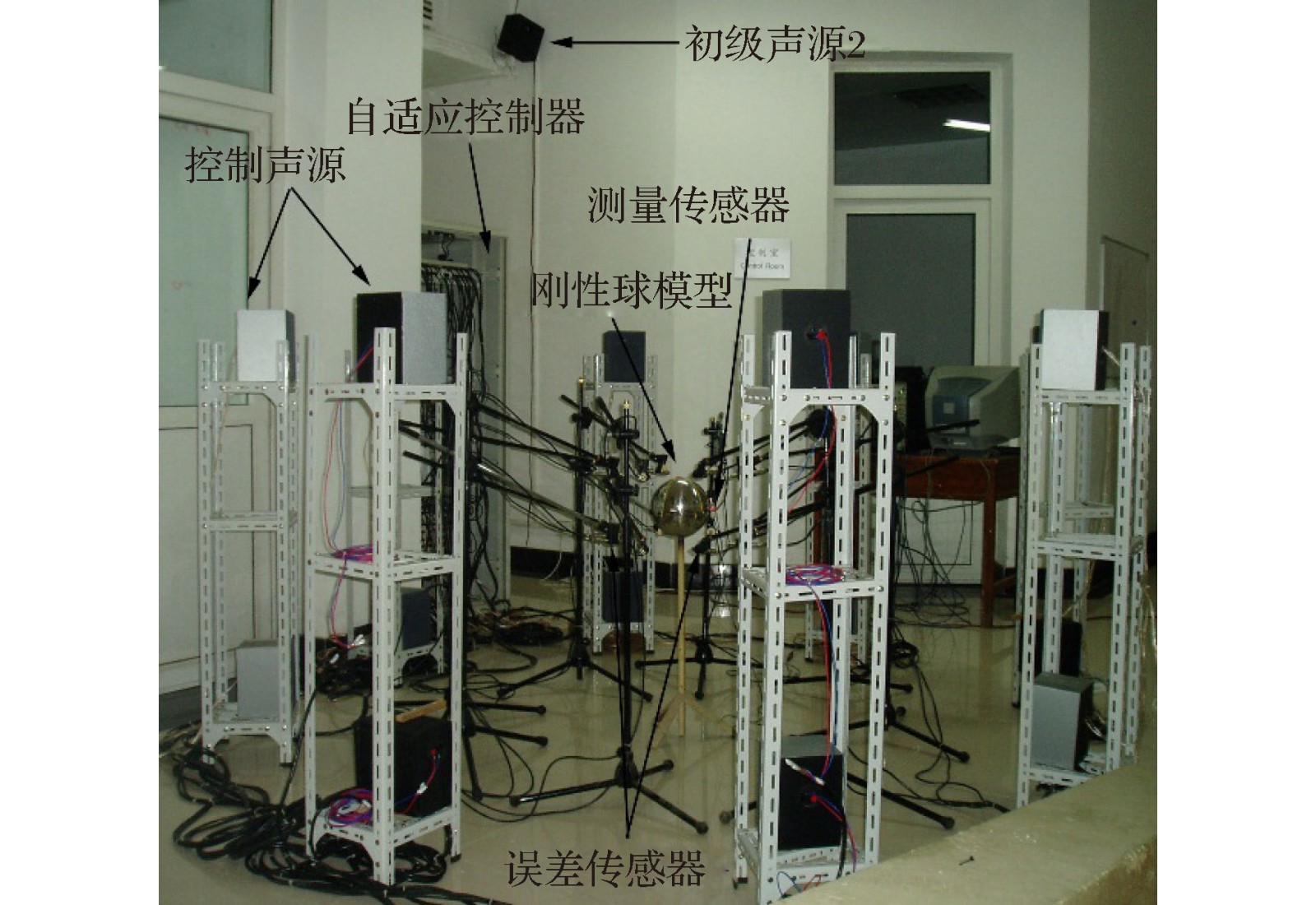
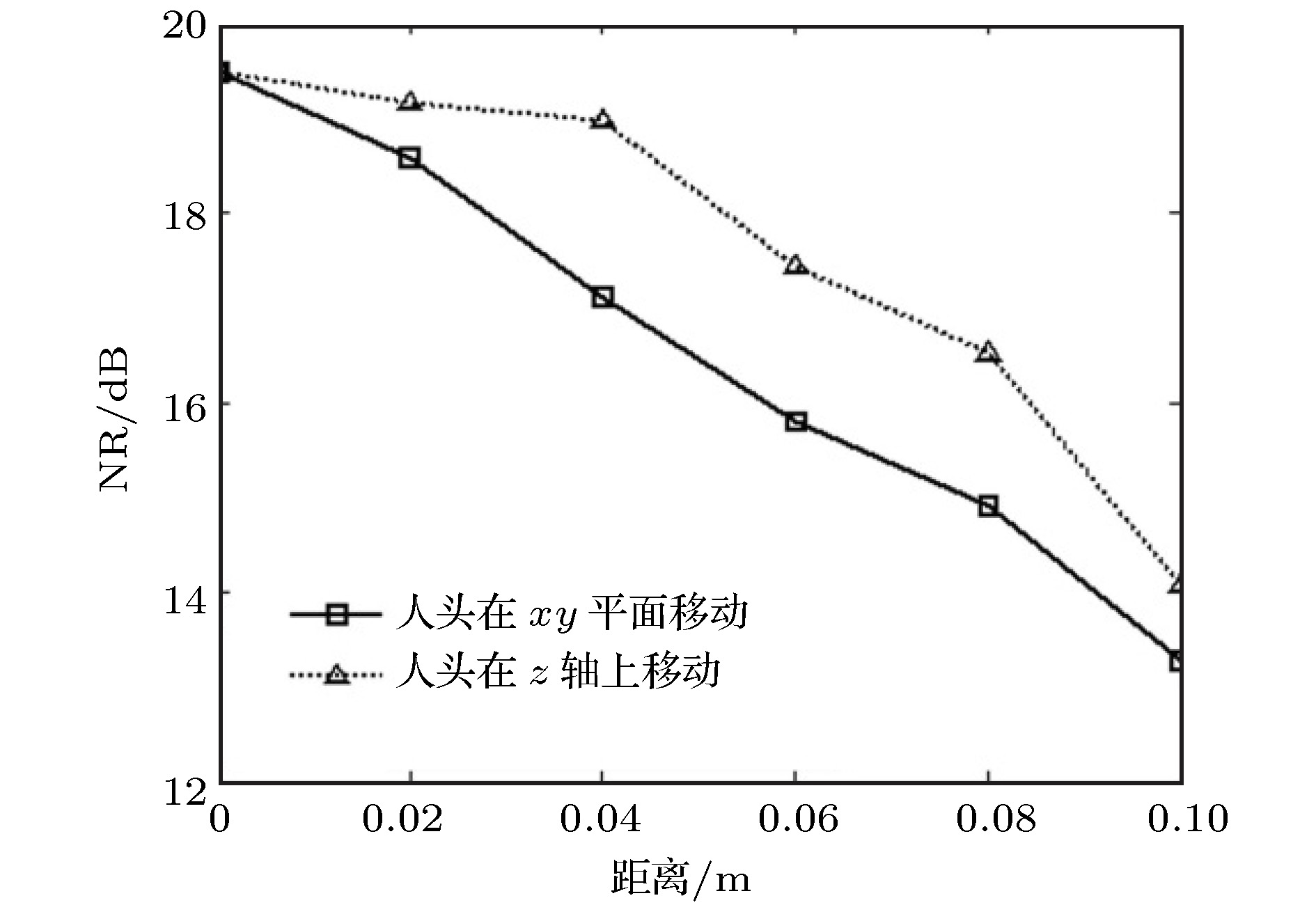
复杂声学环境中人耳附近空间降噪是有源噪声控制研究的重要课题, 目前采用的主要方法为有源降噪头靠(AHR)和虚拟声屏障(VSB). 本文简述AHR与VSB的发展历史和研究现状, 介绍其物理原理和设计方法, 评述其在实际应用中的优缺点, 讨论了目前存在的问题与未来相关的研究方向. 已有理论、数值仿真和实验研究验证了相关技术在人耳附近空间产生静区的可行性. AHR系统需要较少控制源, 系统相对简单易实现, 但静区范围较小, 结合虚拟传声器技术和人头跟踪技术后可实现随人头移动的静区, 降噪频率可达中高频; VSB产生的静区范围较大, 但控制源个数较多, 系统复杂和成本高, 可通过代价函数和控制源优化, 以及主被动混合控制技术来提高有效降噪频率范围和减少控制源个数.Local control of sound around human ears in complex acoustic environments is important for both active noise control and sound reproduction. Two typical active noise control approaches for this objective are active headrest systems and virtual sound barrier systems. In this paper, the history and the present status for the active headrest systems and virtual sound barrier systems are briefed first, then the theoretical principles, the design methods and the applications of these approaches are reviewed. Their advantages and limitations are discussed, and finally, the currently existing problems and future research directions are presented. The feasibility of these approaches to generating a quiet zone near a human ear has been verified by the theoretical research, numerical simulations and experiments. The active headrest systems require less control sources and are simpler for implementation; however, they suffer the problem of small-sized quiet zones. This results in the restrictions on the head movement since the error sensor needs to be close to the human ear to obtain better noise reduction performance. Based on the virtual sensor technology, a physical error sensor can be placed farther away from the human head, and create the quiet zone at the virtual sensor position near the human ear. Moreover, combined with the virtual sensor technology and the head-tracking technology, an active headrest system can generate a moving zone of quiet following the head movement, and the noise reduction can be achieved in a middle-to-high frequency range. A virtual sound barrier system reduces the sound pressure inside a volume, through controlling the sound pressure and normal gradient on the boundary of the volume. Two main design methods are the expansion method of the primary sound field which is suitable for steady primary sound fields, and the least mean square method which is applicable to time-varying primary sound fields. It can generate larger quiet zone at the cost of more control sources, more complexity and high cost. Optimizing cost functions and control sources and using hybrid active and passive control techniques can increase the effective frequency range and reduce the number of control sources. Although the feasibility of these two systems has been verified, more research work is needed to develop practical systems. An active-passive hybrid structure for specific application scenarios, which combines these two approaches together as well as the virtual sensor technology and sound field estimation technology, may most likely be practical methods to achieve effective noise reduction near the human ear in a complex sound field in the near future.
-
Keywords:
- active noise control /
- active headrest /
- virtual sound barrier /
- quiet zone
[1] Bies D A, Hansen C H 2009 Engineering Noise Control: Theory and Practice (London and New York: Spon Press) pp3−12
[2] Fuller C R, von Flotow A H 1995 IEEE Contr. Syst. Mag. 15 9
 Google Scholar
Google Scholar
[3] Nelson P A, Elliott S J 1986 J. Sound Vib. 105 173
Google Scholar
[4] Nelson P A, Curtis A R D, Elliott S J, Bullmore A J 1987 J. Sound Vib. 116 397
Google Scholar
[5] Omoto A, Fujiwara K 1993 J. Acoust. Soc. Am. 94 2173
[6] Omoto A, Takashima K, Fujiwara K 1997 J. Acoust. Soc. Am. 102 1671
Google Scholar
[7] Guo J, Pan J 1998 J. Acoust. Soc. Am. 104 3408
Google Scholar
[8] Niu F, Zou H, Qiu X, Wu M 2007 J. Sound Vib. 299 409
Google Scholar
[9] Ang L Y L, Yong K K, Lee H P 2017 Appl. Acoust. 122 16
Google Scholar
[10] Bai M R, Pan W, Chen H 2018 J. Acoust. Soc. Am. 143 1613
Google Scholar
[11] Elliott S J, Joseph P, Bullmore A J, Nelson P A 1988 J. Sound Vib. 120 183
Google Scholar
[12] Garcia-Bonito J, Elliott S J 1995 J. Acoust. Soc. Am. 98 1017
Google Scholar
[13] Rafaely B, Elliott S J, Garciabonito J 1999 J. Acoust. Soc. Am. 106 787
Google Scholar
[14] Garcia-Bonito J, Elliott S J, Boucher C C 1997 J. Acoust. Soc. Am. 101 3498
Google Scholar
[15] Elliott S J, Jones M 2006 J. Acoust. Soc. Am. 119 2702
Google Scholar
[16] Jung W, Elliott S J, Cheer J 2017 J. Acoust. Soc. Am. 142 298
Google Scholar
[17] Elliott S J, Jung W, Cheer J 2018 Sci. Rep. 8 5403
Google Scholar
[18] Moreau D J, Ghan J, Cazzolato B S, Zander A C 2009 J. Acoust. Soc. Am. 125 3742
Google Scholar
[19] Ise S 1999 Acta Acust. United Ac. 85 78
[20] Qiu X, Li N, Chen G 2005 Proceedings of the 12th International Congress on Sound and Vibration, Lisbon, Portugal, July 11−14, 2005
[21] Zou H, Qiu X, Lu J, Niu F 2007 J. Sound Vib. 307 379
Google Scholar
[22] Zou H, Qiu X 2008 Appl. Acoust. 69 875
Google Scholar
[23] Epain N, Friot E 2007 J. Sound Vib. 299 587
Google Scholar
[24] Zhang X, Qiu X 2017 Appl. Acoust. 116 283
Google Scholar
[25] Olson H F, May E G 1953 J. Acoust. Soc. Am. 25 1130
Google Scholar
[26] David A, Elliott S J 1994 Appl. Acoust. 41 63
Google Scholar
[27] Joseph P, Elliott S J, Nelson P A 1994 J. Sound Vib. 172 605
Google Scholar
[28] Elliott S J, Garcia-Bonito J 1995 J. Sound Vib. 186 696
Google Scholar
[29] Garcia-Bonito J, Elliott S J 1999 J. Sound Vib. 221 85
Google Scholar
[30] Garcia-Bonito J, Elliot S J, Bonilha M 1997 J. Sound Vib. 201 43
Google Scholar
[31] Rafaely B 2000 J. Acoust. Soc. Am. 107 3254
Google Scholar
[32] Rafaely B 2001 J. Acoust. Soc. Am. 110 296
Google Scholar
[33] Elliott S J, David A 1992 Proceedings of 1st International Conference on Motion and Vibration Control Yokohama, Japan, September 7−11, 1992 p1027
[34] Roure A, Albarrazin A 1999 Active 99: the International Symposium on Active Control of Sound and Vibration Florida, USA, December 2−4, 1999 p1233
[35] Jung W, Elliott S J, Cheer J 2018 J. Acoust. Soc. Am. 143 2858
Google Scholar
[36] Kestell C D, Hansen C H, Cazzolato B S 2000 Int. J. Acoust. Vib. 5 63
[37] Kestell C D, Cazzolato B S, Hansen C H 2001 J. Acoust. Soc. Am. 109 232
Google Scholar
[38] Petersen C D, Fraanje R, Cazzolato B S, Zander A C, Hansen C H 2008 Mech. Syst. Signal Pr. 22 490
Google Scholar
[39] Petersen C D, Zander A C, Cazzolato B S, Hansen C H 2007 J. Acoust. Soc. Am. 121 1459
Google Scholar
[40] Moreau D J, Cazzolato B S, Zander A C 2008 J. Acoust. Soc. Am. 123 3063
[41] Elliott S, Simon M, Cheer J, Jung W 2015 12th Western Pacific Acoustics Conference Singapore, December 6−10, 2015 p385
[42] Lei C, Xu J, Wang J, Zheng C, Li X 2015 J. Low Freq. Noise V. A. 34 233
Google Scholar
[43] Cook R K, Waterhouse R V, Berendt R D, Edelman S, Thompson M C 1955 J. Acoust. Soc. Am. 27 1072
Google Scholar
[44] Joseph P 1990 Ph.D. Dissertation (England: University of Southampton)
[45] Elliott S J, Cheer J 2015 J. Acoust. Soc. Am. 137 1936
Google Scholar
[46] Sano H 2011 The 40th Inter-noise & Noise-con Congress & Conference Osaka, Japan, September 4−7, 2011 p2491
[47] Duan J 2011 Ph.D. Dissertation (USA: University of Cincinnati)
[48] Nelson P A, Elliott S J 1992 Active control of sound (London: Academic Press) pp282−287
[49] Jessel M J M 1968 Proceedings 6th International Congress on Acoustics Tokyo, Japan, Auguster 21−28, 1968 paper F-5−6 p82
[50] Malyuzhinets G D 1969 Sov. Phys. Dokl. 14 118
[51] Canevet G 1978 J. Sound Vib. 58 333
Google Scholar
[52] Jessel M J M, Mangiante G A 1972 J. Sound Vib. 23 383
Google Scholar
[53] Mangiante G A 1977 J. Acoust. Soc. Am. 61 1516
Google Scholar
[54] 邹海山, 邱小军, 卢晶 2008 声学技术 27 621
Zou H S, Qiu X J, Lu J 2008 Tech. Acoust. 27 621
[55] 邹海山, 邱小军 2009 南京大学学报(自然科学版) 45 57
Google Scholar
Zou H S, Qiu X J 2009 J. Nanjing Univ. (Nat. Sci. Ed.)
45 57 Google Scholar
[56] 饶维 2011 硕士学位论文 (南京: 南京大学)
Rao W 2011 M.S Thesis (Nanjing: Nanjing University) (in Chinese)
[57] Qiu X, Zou H, Rao W 2009 Proceedings of the 2009 International Symposium on Active Control of Sound and Vibration Ottawa Canada, August 20−22, 2009 p239
[58] 邹海山 2007 博士学位论文 (南京: 南京大学)
Zou H S 2007 Ph.D. Dissertation (Nanjing: Nanjing University) (in Chinese)
[59] Williams E 1999 Fourier Acoustics: Sound Radiation and Nearfield Acoustical Holography (London: Academic Press) pp186−211
[60] Xue J, Huang X, Lu J, Wang S, Tao J, Chen K 2015 The 44th Inter-noise & Noise-con Congress & Conference San Francisco USA, August 9−12, 2015 p2377
[61] Pawelczyk M 2003 Int. J. Adapt. Control 17 785
[62] Poletti M A, Abhayapala T D, Samarasinghe P 2012 J. Acoust. Soc. Am. 131 3814
Google Scholar
[63] Chang J H, Jacobsen F 2013 J. Acoust. Soc. Am. 133 2046
Google Scholar
[64] Tao J, Wang S, Qiu X, Pan J 2017 Appl. Acoust. 123 1
Google Scholar
[65] Huang X, Zou H, Qiu X 2015 Build. Environ. 94 891
Google Scholar
[66] Wang X, Koba Y, Ishikawa S, Kijmoto S 2014 The 43rd Inter-noise & Noise-con Congress & Conference Melbourne, Australia, November 16−19, 2014 p378
[67] 韩荣, 吴鸣, 王晓琳, 孙红灵, 杨军 2018 应用声学 37 664
Google Scholar
Han R, Wu M, Wang X, Sun H, Yang J 2018 Appl. Acoust. 37 664
Google Scholar
-

-
[1] Bies D A, Hansen C H 2009 Engineering Noise Control: Theory and Practice (London and New York: Spon Press) pp3−12
[2] Fuller C R, von Flotow A H 1995 IEEE Contr. Syst. Mag. 15 9
Google Scholar
[3] Nelson P A, Elliott S J 1986 J. Sound Vib. 105 173
Google Scholar
[4] Nelson P A, Curtis A R D, Elliott S J, Bullmore A J 1987 J. Sound Vib. 116 397
Google Scholar
[5] Omoto A, Fujiwara K 1993 J. Acoust. Soc. Am. 94 2173
[6] Omoto A, Takashima K, Fujiwara K 1997 J. Acoust. Soc. Am. 102 1671
Google Scholar
[7] Guo J, Pan J 1998 J. Acoust. Soc. Am. 104 3408
Google Scholar
[8] Niu F, Zou H, Qiu X, Wu M 2007 J. Sound Vib. 299 409
Google Scholar
[9] Ang L Y L, Yong K K, Lee H P 2017 Appl. Acoust. 122 16
Google Scholar
[10] Bai M R, Pan W, Chen H 2018 J. Acoust. Soc. Am. 143 1613
Google Scholar
[11] Elliott S J, Joseph P, Bullmore A J, Nelson P A 1988 J. Sound Vib. 120 183
Google Scholar
[12] Garcia-Bonito J, Elliott S J 1995 J. Acoust. Soc. Am. 98 1017
Google Scholar
[13] Rafaely B, Elliott S J, Garciabonito J 1999 J. Acoust. Soc. Am. 106 787
Google Scholar
[14] Garcia-Bonito J, Elliott S J, Boucher C C 1997 J. Acoust. Soc. Am. 101 3498
Google Scholar
[15] Elliott S J, Jones M 2006 J. Acoust. Soc. Am. 119 2702
Google Scholar
[16] Jung W, Elliott S J, Cheer J 2017 J. Acoust. Soc. Am. 142 298
Google Scholar
[17] Elliott S J, Jung W, Cheer J 2018 Sci. Rep. 8 5403
Google Scholar
[18] Moreau D J, Ghan J, Cazzolato B S, Zander A C 2009 J. Acoust. Soc. Am. 125 3742
Google Scholar
[19] Ise S 1999 Acta Acust. United Ac. 85 78
[20] Qiu X, Li N, Chen G 2005 Proceedings of the 12th International Congress on Sound and Vibration, Lisbon, Portugal, July 11−14, 2005
[21] Zou H, Qiu X, Lu J, Niu F 2007 J. Sound Vib. 307 379
Google Scholar
[22] Zou H, Qiu X 2008 Appl. Acoust. 69 875
Google Scholar
[23] Epain N, Friot E 2007 J. Sound Vib. 299 587
Google Scholar
[24] Zhang X, Qiu X 2017 Appl. Acoust. 116 283
Google Scholar
[25] Olson H F, May E G 1953 J. Acoust. Soc. Am. 25 1130
Google Scholar
[26] David A, Elliott S J 1994 Appl. Acoust. 41 63
Google Scholar
[27] Joseph P, Elliott S J, Nelson P A 1994 J. Sound Vib. 172 605
Google Scholar
[28] Elliott S J, Garcia-Bonito J 1995 J. Sound Vib. 186 696
Google Scholar
[29] Garcia-Bonito J, Elliott S J 1999 J. Sound Vib. 221 85
Google Scholar
[30] Garcia-Bonito J, Elliot S J, Bonilha M 1997 J. Sound Vib. 201 43
Google Scholar
[31] Rafaely B 2000 J. Acoust. Soc. Am. 107 3254
Google Scholar
[32] Rafaely B 2001 J. Acoust. Soc. Am. 110 296
Google Scholar
[33] Elliott S J, David A 1992 Proceedings of 1st International Conference on Motion and Vibration Control Yokohama, Japan, September 7−11, 1992 p1027
[34] Roure A, Albarrazin A 1999 Active 99: the International Symposium on Active Control of Sound and Vibration Florida, USA, December 2−4, 1999 p1233
[35] Jung W, Elliott S J, Cheer J 2018 J. Acoust. Soc. Am. 143 2858
Google Scholar
[36] Kestell C D, Hansen C H, Cazzolato B S 2000 Int. J. Acoust. Vib. 5 63
[37] Kestell C D, Cazzolato B S, Hansen C H 2001 J. Acoust. Soc. Am. 109 232
Google Scholar
[38] Petersen C D, Fraanje R, Cazzolato B S, Zander A C, Hansen C H 2008 Mech. Syst. Signal Pr. 22 490
Google Scholar
[39] Petersen C D, Zander A C, Cazzolato B S, Hansen C H 2007 J. Acoust. Soc. Am. 121 1459
Google Scholar
[40] Moreau D J, Cazzolato B S, Zander A C 2008 J. Acoust. Soc. Am. 123 3063
[41] Elliott S, Simon M, Cheer J, Jung W 2015 12th Western Pacific Acoustics Conference Singapore, December 6−10, 2015 p385
[42] Lei C, Xu J, Wang J, Zheng C, Li X 2015 J. Low Freq. Noise V. A. 34 233
Google Scholar
[43] Cook R K, Waterhouse R V, Berendt R D, Edelman S, Thompson M C 1955 J. Acoust. Soc. Am. 27 1072
Google Scholar
[44] Joseph P 1990 Ph.D. Dissertation (England: University of Southampton)
[45] Elliott S J, Cheer J 2015 J. Acoust. Soc. Am. 137 1936
Google Scholar
[46] Sano H 2011 The 40th Inter-noise & Noise-con Congress & Conference Osaka, Japan, September 4−7, 2011 p2491
[47] Duan J 2011 Ph.D. Dissertation (USA: University of Cincinnati)
[48] Nelson P A, Elliott S J 1992 Active control of sound (London: Academic Press) pp282−287
[49] Jessel M J M 1968 Proceedings 6th International Congress on Acoustics Tokyo, Japan, Auguster 21−28, 1968 paper F-5−6 p82
[50] Malyuzhinets G D 1969 Sov. Phys. Dokl. 14 118
[51] Canevet G 1978 J. Sound Vib. 58 333
Google Scholar
[52] Jessel M J M, Mangiante G A 1972 J. Sound Vib. 23 383
Google Scholar
[53] Mangiante G A 1977 J. Acoust. Soc. Am. 61 1516
Google Scholar
[54] 邹海山, 邱小军, 卢晶 2008 声学技术 27 621
Zou H S, Qiu X J, Lu J 2008 Tech. Acoust. 27 621
[55] 邹海山, 邱小军 2009 南京大学学报(自然科学版) 45 57
Google Scholar
Zou H S, Qiu X J 2009 J. Nanjing Univ. (Nat. Sci. Ed.)
45 57 Google Scholar
[56] 饶维 2011 硕士学位论文 (南京: 南京大学)
Rao W 2011 M.S Thesis (Nanjing: Nanjing University) (in Chinese)
[57] Qiu X, Zou H, Rao W 2009 Proceedings of the 2009 International Symposium on Active Control of Sound and Vibration Ottawa Canada, August 20−22, 2009 p239
[58] 邹海山 2007 博士学位论文 (南京: 南京大学)
Zou H S 2007 Ph.D. Dissertation (Nanjing: Nanjing University) (in Chinese)
[59] Williams E 1999 Fourier Acoustics: Sound Radiation and Nearfield Acoustical Holography (London: Academic Press) pp186−211
[60] Xue J, Huang X, Lu J, Wang S, Tao J, Chen K 2015 The 44th Inter-noise & Noise-con Congress & Conference San Francisco USA, August 9−12, 2015 p2377
[61] Pawelczyk M 2003 Int. J. Adapt. Control 17 785
[62] Poletti M A, Abhayapala T D, Samarasinghe P 2012 J. Acoust. Soc. Am. 131 3814
Google Scholar
[63] Chang J H, Jacobsen F 2013 J. Acoust. Soc. Am. 133 2046
Google Scholar
[64] Tao J, Wang S, Qiu X, Pan J 2017 Appl. Acoust. 123 1
Google Scholar
[65] Huang X, Zou H, Qiu X 2015 Build. Environ. 94 891
Google Scholar
[66] Wang X, Koba Y, Ishikawa S, Kijmoto S 2014 The 43rd Inter-noise & Noise-con Congress & Conference Melbourne, Australia, November 16−19, 2014 p378
[67] 韩荣, 吴鸣, 王晓琳, 孙红灵, 杨军 2018 应用声学 37 664
Google Scholar
Han R, Wu M, Wang X, Sun H, Yang J 2018 Appl. Acoust. 37 664
Google Scholar

 下载:
下载:
计量
- 文章访问数: 21598
- PDF下载量: 265
- 被引次数: 0
