










-
在天文高分辨成像领域, 自适应光学校正和事后图像复原都必不可少, 但传统的自适应光学系统控制方法以提升光学成像质量为目的, 并未考虑图像复原环节, 因此, 研究一种结合两者以获得高质量复原图像为目标的控制方法具有重要意义. 本文对传统自适应光学技术结合事后图像解卷积的方法进行了分析, 阐述了其存在的缺陷. 首次提出了将自适应光学技术和图像复原技术相结合进行系统分析的思想, 并提出了变形镜校正度(变形镜控制电压相对于传统方法控制电压的缩放比例)的概念, 通过改变校正度可实现变形镜校正残差和波前传感器探测误差的调整, 同时证明了复原图像质量在校正度下降的方向存在一个最优值, 用最优校正度来修正变形镜控制电压, 就得到了一种新的控制方法. 针对点源目标成像, 仿真表明该方法相比于传统方法, 能够得到质量更好的复原图像.In the field of astronomical high resolution imaging, adaptive optical correction and image restoration are necessary, and these two techniques can be used either separately or jointly to improve the quality of observed images. However, for a long time, adaptive optics and image restoration technology have been developing independently because they belong to different research fields, and even though they are combined together, it is just a simple splicing of the two technologies, with no crossover between the two. Such a control method results in adaptive optical correction producing only the best possible intermediate result—optical imaging, but is out of control for the final result—restored image. Therefore, it is of great significance to study a control method that combines the two methods in order to obtain the high-quality restored image. In this paper, the traditional hybrid method (adaptive optics + image post-deconvolution) is analyzed and its defects are expounded. The idea of combining adaptive optics and image restoration for system analysis is proposed for the first time, and the concept of correction degree of deformable mirror (the scaling ratio of control voltage of deformable mirror to that of traditional control voltage) is proposed. By changing the degree of correction, the correction residual of the deformation mirror and the detection error of the wavefront sensor can be adjusted. It is proved that there exists an optimal value of the quality of the reconstructed image in the direction of reducing correction degree, and a new control method is obtained by using the optimal correction degree to correct the control voltage of the deformation mirror. For the application in point target imaging, the simulations are carried out with 37-element and 61-element deformable mirrors under several typical wavefront aberrations, and the results show that this method can obtain a better restoration image than traditional methods. This method has more potential applications in adaptive optical systems with large fitting residuals. The idea that adaptive optics and image restoration are considered as a whole, has not been reported in the literature before, so the work of this paper provides a new way of thinking for the research in related fields.
-
Keywords:
- adaptive optics /
- image restoration technique /
- optimal control method
[1] Babcock H W 1953 Publ. Astron. Soc. Pac. 65 229
 Google Scholar
Google Scholar
[2] Hardy J W, Lefebvre J E, Koliopoulos C L 1977 J. Opt. Soc. Am. 67 360
Google Scholar
[3] Rigaut F, Rousset G, Kern P, Fontanella J C, Gaffard J P, Merkle F, Léna P 1991 Astron. Astrophys. 250 280
[4] Rousset G, Fontanella J C, Kern P, Gigan P, Rigaut F, Lena P, Boyer C, Jagourel P, Gaffard J P, Merkle F 1990 Astron. Astrophys. 230 29
Google Scholar
[5] Wizinowich P L, Le Mignant D, Bouchez A H, Campbell R D, Chin J C Y, Contos A R, van Dam M A, Hartman S K, Johansson E M, Lafon R E, Lewis H, Stomski P J, Summers D M, Brown C G, Danforth P M, Max C E, Pennington D M 2006 Publ. Astron. Soc. Pac. 118 297
Google Scholar
[6] Esposito S, Riccardi A, Pinna E, Puglisi A, Quirós-Pacheco F, Arcidiacono C, Xompero M, Briguglio R, Agapito G, Busoni L, Fini, L Argomedo J, Gherardi A, Brusa G, Miller D, Guerra J C, Stefanini P, Salinari P 2011 Proceedings Volume 8149 Astronomical Adaptive Optics Systems and Applications IV San Diego, California, United States, September 16, 2011 p8149
[7] Rousset G, Lacombe F, Puget P, Hubin N N, Gendron E, Fusco T, Arsenault R, Charton J, Feautrier P, Gigan P, Kern P Y, Lagrange A M, Madec P Y, Mouillet D, Rabaud D, Rabou, P, Stadler E, Zins G 2002 Proceedings Volume 4839 Adaptive Optical System Technologies II Waikoloa, Hawai'i, United States, February 7, 2003 p140
[8] Rigaut F, Neichel B, Boccas M, Céline d'Orgeville, Fabrice V, Marcos A D, Gustavo A, Vincent F, Ramon L G, Gaston G, Chad C, Angelic W E, Stan K, Eric J, Javier L, Vanessa M, Gabriel P, William N R, Roberto R, Shane W, Matthieu B, Gelys T, Michael S, Benjamin I, Corinne B, Brent L E, Ralf F, Damien G, Aurea G R, Felipe D 2014 Mon. Not. Roy. Astron. Soc. 437 2361
Google Scholar
[9] 饶长辉, 姜文汉, 张雨东, 凌宁, 李梅, 张学军, 李彦英, 官春林, 陈东红, 沈锋, 廖周, 汤国茂, 周璐春, 王彩霞, 张昂, 吴碧琳, 魏凯 2006 量子电子学报 23 295
Google Scholar
Rao C H, Jiang W H, Zhang Y D, Ling N, Li M, Zhang X J, Li Y Y, Guan C L, Chen D H, Shen F, Liao Z, Tang G M, Zhou L C, Wang C X, Zhang A, Wu B L, Wei K 2006 Chin. J. Quant. Elect. 23 295
Google Scholar
[10] Rao C H, Wei K, Zhang X J, Zhang A, Zhang Y D, Xian H, Zhou L C, Guan C L, Li M, Chen D H, Chen S Q, Tian Y, Liao Z 2010 Proceedings of 5th International Symposium on Advanced Optical Manufacturing and Testing Technologies: Large Mirrors and Telescopes Dalian, China, April 26-29, 2010 p76541
[11] Rao C H, Zhu L, Rao X J, Zhang L Q, Bao H, Kong L, Guo Y M, Zhong L B, Ma X A, Li M, Wang C, Zhang X J, Fan X L, Chen D H, Feng Z G, Gu N T, Liu Y Y 2016 Astrophys. J. 833 210
Google Scholar
[12] 宁禹, 余浩, 周虹, 饶长辉, 姜文汉 2009 物理学报 58 4717
Google Scholar
Ning Y, Yu H, Zhou H, Rao C H, Jiang W H 2009 Acta Phys. Sin. 58 4717
Google Scholar
[13] Primot J, Rousset G, Fontanella J.C 1990 J. Opt. Soc. Am. A-Opt. Image Sci. Vis. 7 1598
Google Scholar
[14] 李斐, 饶长辉 2012 物理学报 61 029502
Google Scholar
Li F, Rao C H 2012 Acta Phys. Sin. 61 029502
Google Scholar
[15] Jolissaint L, Carfantan H, Anterrieu E 2008 Proceedings of SPIE Volume 7015 Adaptive Optics Systems Marseille, France, June 23−28 2008 p70152
[16] 李新阳 2000 博士学位论文 (北京: 中国科学院研究生院)
Li X Y 2000 Ph. D. Dissertation (Beijing: University of Chinese Academy of Sciences) (in Chinese)
[17] 赵金宇 2011 红外与激光工程 40 1806
Google Scholar
Zhao J Y 2011 Infrared Laser Eng. 40 1806
Google Scholar
[18] 张强, 姜文汉, 许冰 1998 光电工程 6 15
Zhang Q, Jiang W H, Xu B 1998 Opto-Electron. Eng. 6 15
[19] Murli A, D'Amore L, Simone V D 1999 Proceedings 10th International Conference on Image Analysis and Processing Venice, Italy, Sept 27−29, 1999 p394
[20] 李新阳, 姜文汉 2002 光学学报 22 1236
Google Scholar
Li X Y, Jiang W H 2002 Acta Opt. Sin. 22 1236
Google Scholar
[21] 马昌凤 2010 最优化方法及其Matlab程序设计 (北京: 科学出版社) 第15页
Ma C F 2010 Optimization Method and Matlab Programming (Beijing: Science Press) p15 (in Chinese)
-

图 3 61单元变形镜对离焦像差校正结果 (a)校正前系数; (b)校正后系数
Fig. 3. Correction results of defocusing aberration by 61-element DM: (a) Coefficient before correction; (b) coefficient after correction.
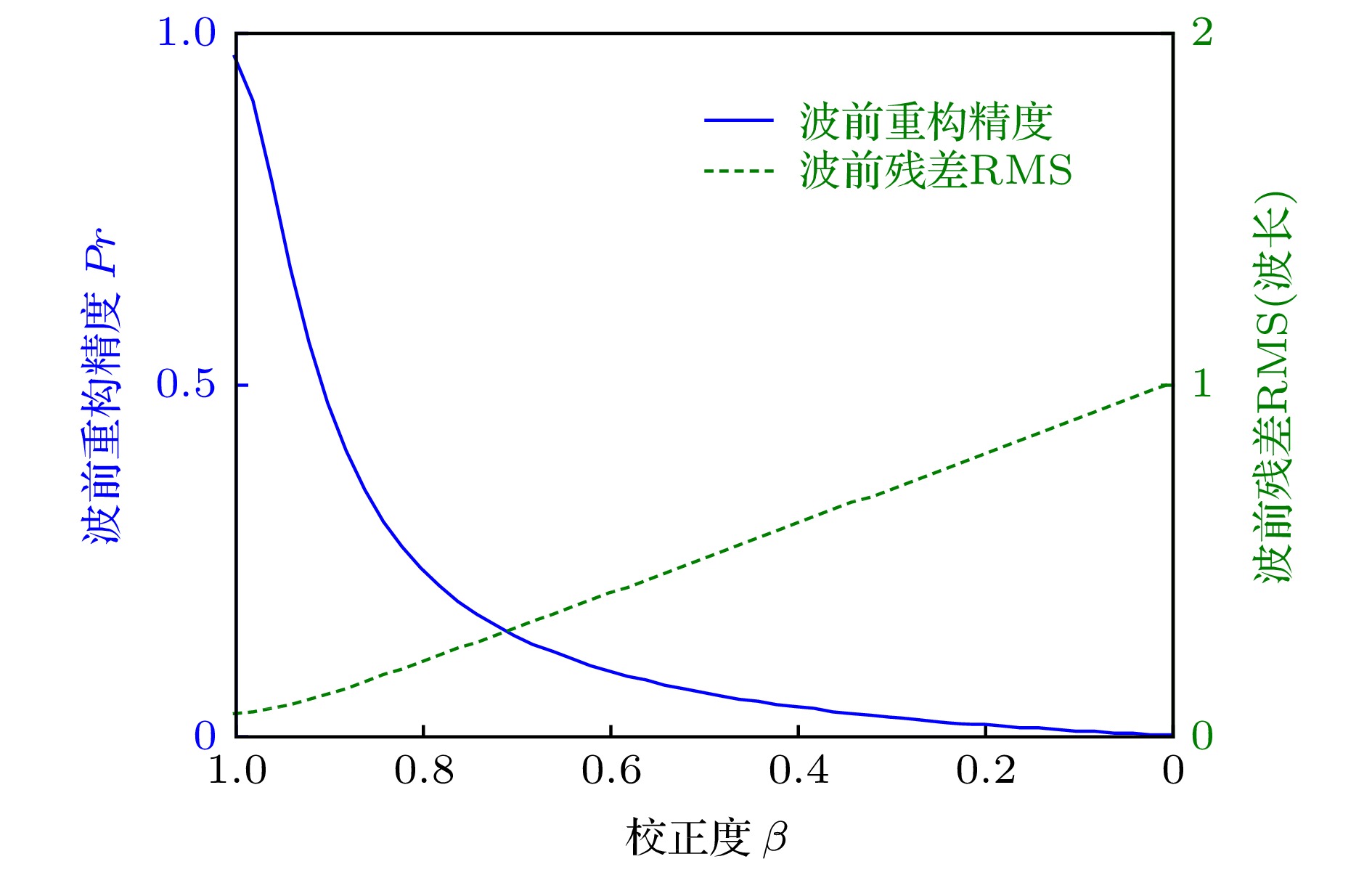
图 4 波前重构精度和波前残差均方差随校正度β的变化趋势
Fig. 4. Curves of wave-front reconstruction accuracy and RMS of wave-front residual error changing with β.
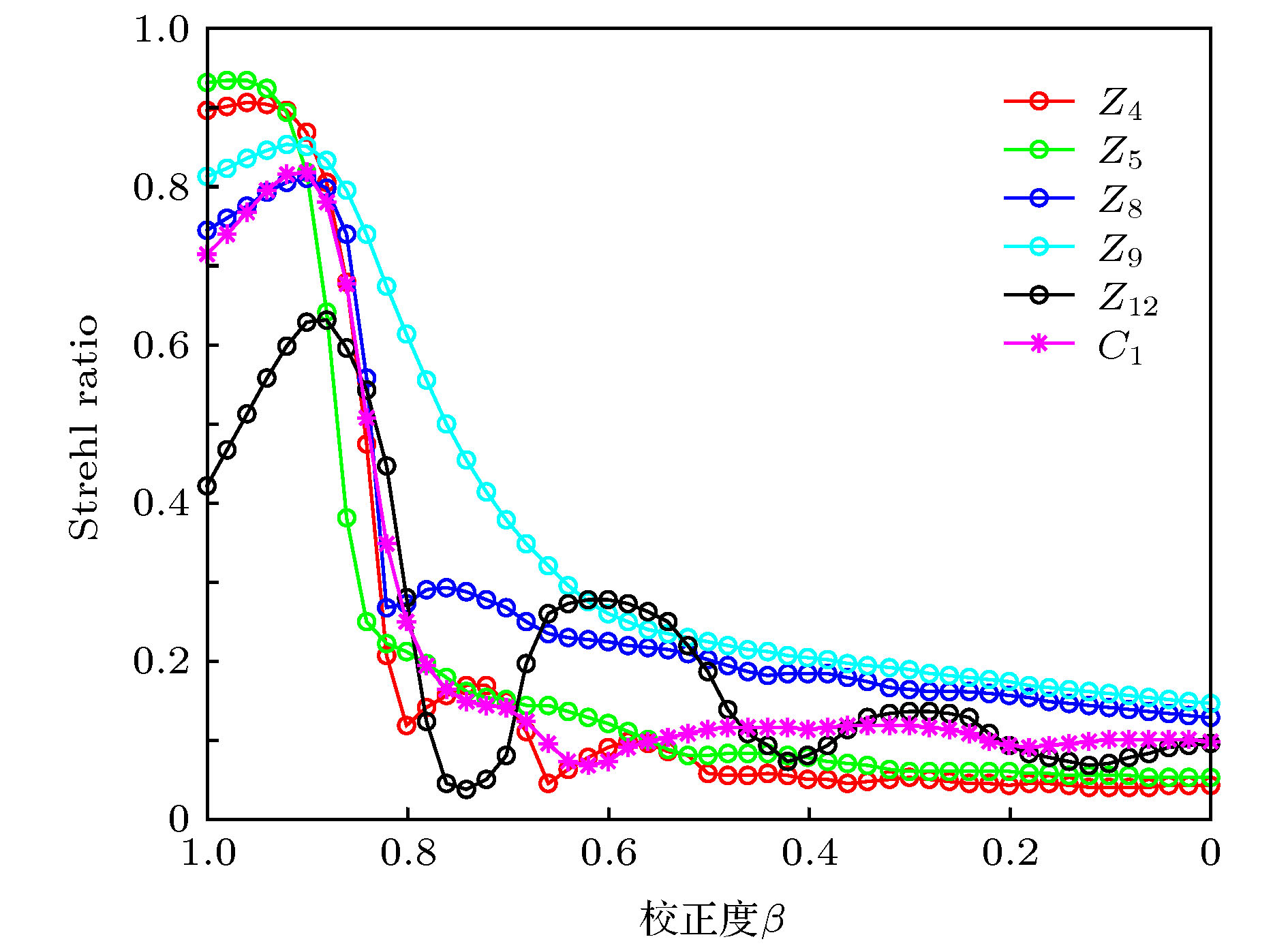
图 5 61单元变形镜不同校正度下复原图像的SR
Fig. 5. SR of restored images with different β by 61-element DM.

图 6 61单元变形镜不同噪声强度下复原图像的相对SR (a) var = (10–4)2; (b) var = (5 × 10–4)2; (c) var = (10–3)2
Fig. 6. Relative SR of restored images with different noise by 61-element DM: (a) var = (10–4)2; (b) var = (5 × 10–4)2; (c) var = (10–3)2.
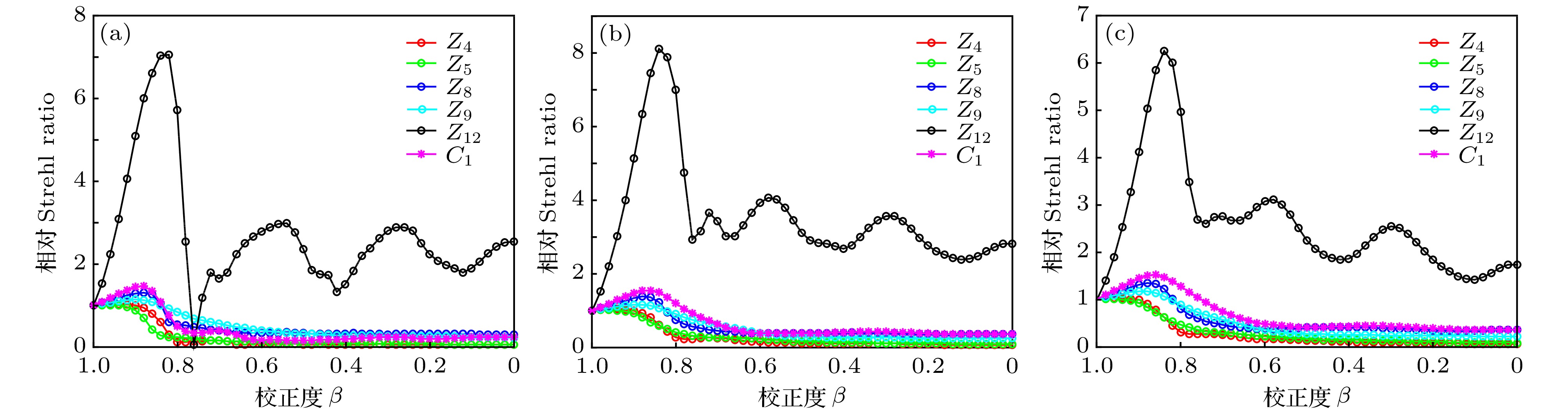
图 7 37单元变形镜不同噪声强度下复原图像的相对SR (a) var = (10–4)2; (b) var = (5 × 10–4)2; (c) var = (10–3)2
Fig. 7. Relative SR of restored images with different noise by 37-element DM: (a) var = (10–4)2; (b) var = (5 × 10–4)2; (c) var = (10–3)2
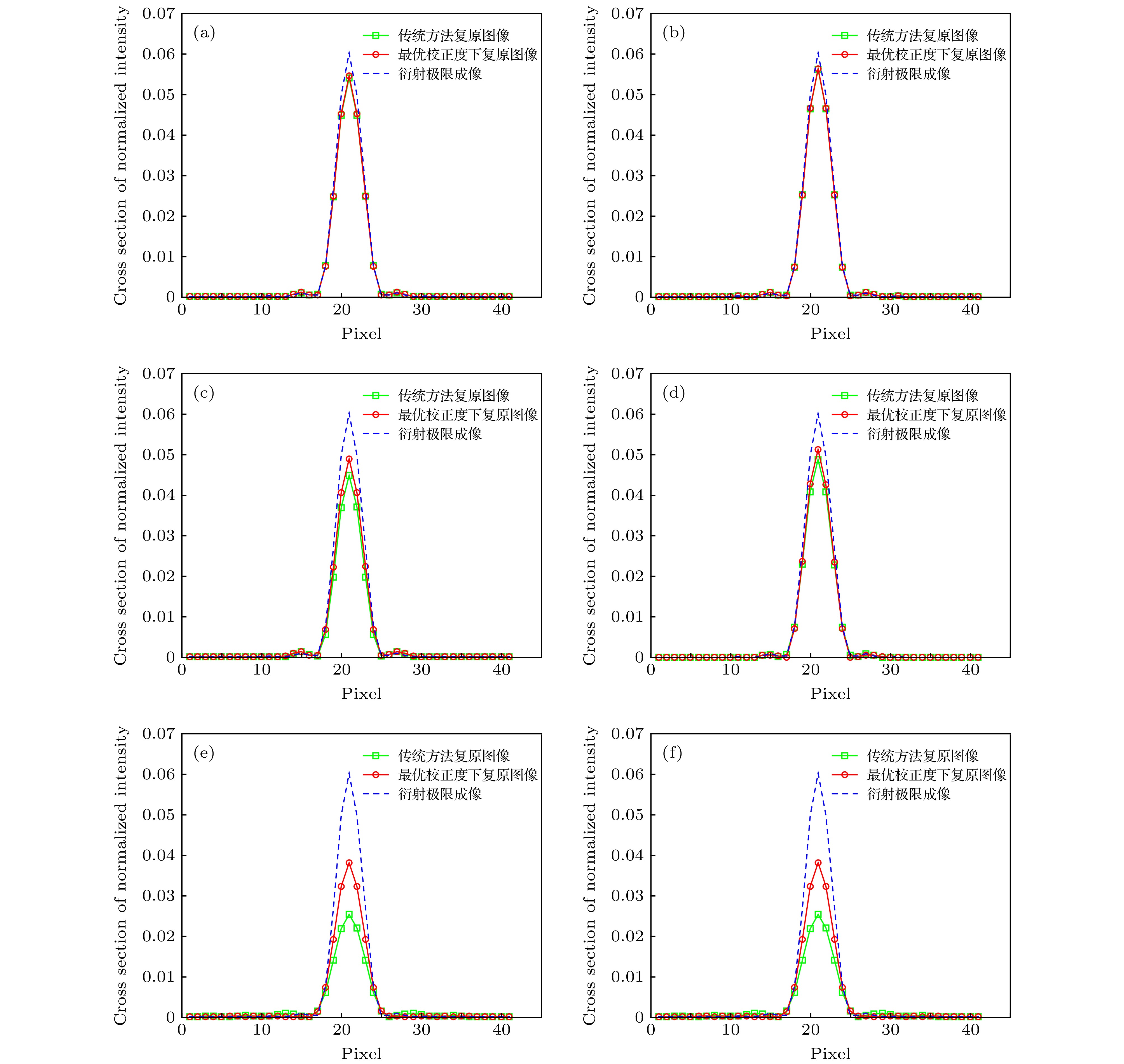
图 8 61单元变形镜在噪声方差(10–4)2下能量归一化截面图的比较 (a) Z4; (b) Z5; (c) Z8; (d) Z9; (e) Z12; (f) C1
Fig. 8. Cross section of normalized intensity under noise variance (10–4)2 with 61-element DM: (a) Z4; (b) Z5; (c) Z8; (d) Z9; (e) Z12; (f) C1.
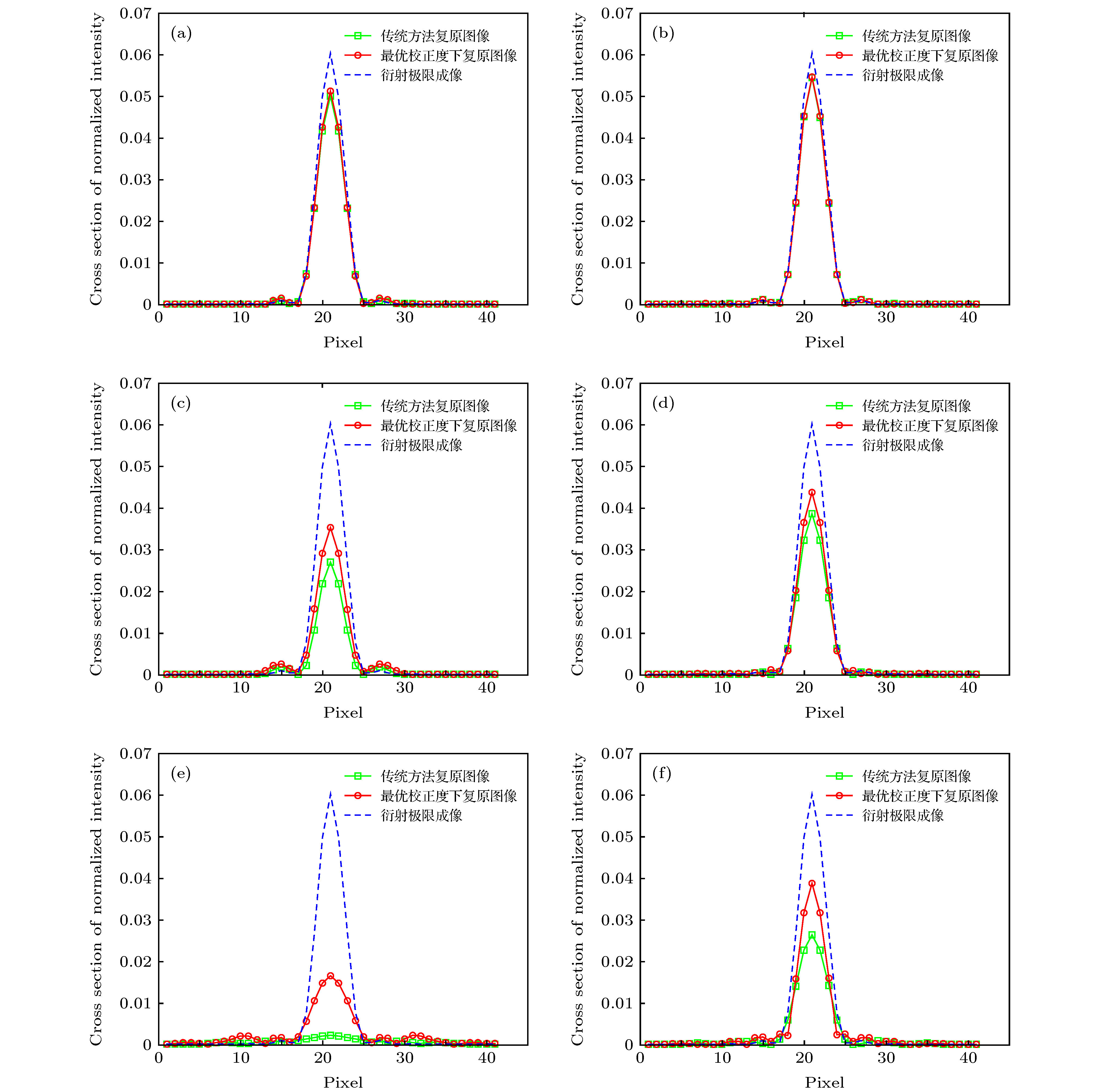
图 9 37单元变形镜在噪声方差(10–4)2下能量归一化截面图的比较 (a) Z4; (b) Z5; (c) Z8; (d) Z9; (e) Z12; (f) C1
Fig. 9. Cross section of normalized intensity under noise variance (10–4)2 with 37-element DM: (a) Z4; (b) Z5; (c) Z8; (d) Z9; (e) Z12; (f) C1.
表 1 61单元变形镜在噪声方差(10–4)2下的结果
Table 1. Results under noise variance (10–4)2 with 61-element DM.
像差类型 最优β 相对SR Z4 0.954 1.009 Z5 0.977 1.003 Z8 0.899 1.09 Z9 0.914 1.05 Z12 0.888 1.51 C1 0.906 1.15  下载: 导出CSV
下载: 导出CSV
表 2 37单元变形镜在噪声方差(10–4)2下的结果
Table 2. Results under noise variance (10–4)2 with 37-element DM.
像差类型 最优β 相对SR Z4 0.934 1.025 Z5 0.966 1.005 Z8 0.882 1.304 Z9 0.897 1.136 Z12 0.830 7.460 C1 0.886 1.470
下载: 导出CSV
-
[1] Babcock H W 1953 Publ. Astron. Soc. Pac. 65 229
Google Scholar
[2] Hardy J W, Lefebvre J E, Koliopoulos C L 1977 J. Opt. Soc. Am. 67 360
Google Scholar
[3] Rigaut F, Rousset G, Kern P, Fontanella J C, Gaffard J P, Merkle F, Léna P 1991 Astron. Astrophys. 250 280
[4] Rousset G, Fontanella J C, Kern P, Gigan P, Rigaut F, Lena P, Boyer C, Jagourel P, Gaffard J P, Merkle F 1990 Astron. Astrophys. 230 29
Google Scholar
[5] Wizinowich P L, Le Mignant D, Bouchez A H, Campbell R D, Chin J C Y, Contos A R, van Dam M A, Hartman S K, Johansson E M, Lafon R E, Lewis H, Stomski P J, Summers D M, Brown C G, Danforth P M, Max C E, Pennington D M 2006 Publ. Astron. Soc. Pac. 118 297
Google Scholar
[6] Esposito S, Riccardi A, Pinna E, Puglisi A, Quirós-Pacheco F, Arcidiacono C, Xompero M, Briguglio R, Agapito G, Busoni L, Fini, L Argomedo J, Gherardi A, Brusa G, Miller D, Guerra J C, Stefanini P, Salinari P 2011 Proceedings Volume 8149 Astronomical Adaptive Optics Systems and Applications IV San Diego, California, United States, September 16, 2011 p8149
[7] Rousset G, Lacombe F, Puget P, Hubin N N, Gendron E, Fusco T, Arsenault R, Charton J, Feautrier P, Gigan P, Kern P Y, Lagrange A M, Madec P Y, Mouillet D, Rabaud D, Rabou, P, Stadler E, Zins G 2002 Proceedings Volume 4839 Adaptive Optical System Technologies II Waikoloa, Hawai'i, United States, February 7, 2003 p140
[8] Rigaut F, Neichel B, Boccas M, Céline d'Orgeville, Fabrice V, Marcos A D, Gustavo A, Vincent F, Ramon L G, Gaston G, Chad C, Angelic W E, Stan K, Eric J, Javier L, Vanessa M, Gabriel P, William N R, Roberto R, Shane W, Matthieu B, Gelys T, Michael S, Benjamin I, Corinne B, Brent L E, Ralf F, Damien G, Aurea G R, Felipe D 2014 Mon. Not. Roy. Astron. Soc. 437 2361
Google Scholar
[9] 饶长辉, 姜文汉, 张雨东, 凌宁, 李梅, 张学军, 李彦英, 官春林, 陈东红, 沈锋, 廖周, 汤国茂, 周璐春, 王彩霞, 张昂, 吴碧琳, 魏凯 2006 量子电子学报 23 295
Google Scholar
Rao C H, Jiang W H, Zhang Y D, Ling N, Li M, Zhang X J, Li Y Y, Guan C L, Chen D H, Shen F, Liao Z, Tang G M, Zhou L C, Wang C X, Zhang A, Wu B L, Wei K 2006 Chin. J. Quant. Elect. 23 295
Google Scholar
[10] Rao C H, Wei K, Zhang X J, Zhang A, Zhang Y D, Xian H, Zhou L C, Guan C L, Li M, Chen D H, Chen S Q, Tian Y, Liao Z 2010 Proceedings of 5th International Symposium on Advanced Optical Manufacturing and Testing Technologies: Large Mirrors and Telescopes Dalian, China, April 26-29, 2010 p76541
[11] Rao C H, Zhu L, Rao X J, Zhang L Q, Bao H, Kong L, Guo Y M, Zhong L B, Ma X A, Li M, Wang C, Zhang X J, Fan X L, Chen D H, Feng Z G, Gu N T, Liu Y Y 2016 Astrophys. J. 833 210
Google Scholar
[12] 宁禹, 余浩, 周虹, 饶长辉, 姜文汉 2009 物理学报 58 4717
Google Scholar
Ning Y, Yu H, Zhou H, Rao C H, Jiang W H 2009 Acta Phys. Sin. 58 4717
Google Scholar
[13] Primot J, Rousset G, Fontanella J.C 1990 J. Opt. Soc. Am. A-Opt. Image Sci. Vis. 7 1598
Google Scholar
[14] 李斐, 饶长辉 2012 物理学报 61 029502
Google Scholar
Li F, Rao C H 2012 Acta Phys. Sin. 61 029502
Google Scholar
[15] Jolissaint L, Carfantan H, Anterrieu E 2008 Proceedings of SPIE Volume 7015 Adaptive Optics Systems Marseille, France, June 23−28 2008 p70152
[16] 李新阳 2000 博士学位论文 (北京: 中国科学院研究生院)
Li X Y 2000 Ph. D. Dissertation (Beijing: University of Chinese Academy of Sciences) (in Chinese)
[17] 赵金宇 2011 红外与激光工程 40 1806
Google Scholar
Zhao J Y 2011 Infrared Laser Eng. 40 1806
Google Scholar
[18] 张强, 姜文汉, 许冰 1998 光电工程 6 15
Zhang Q, Jiang W H, Xu B 1998 Opto-Electron. Eng. 6 15
[19] Murli A, D'Amore L, Simone V D 1999 Proceedings 10th International Conference on Image Analysis and Processing Venice, Italy, Sept 27−29, 1999 p394
[20] 李新阳, 姜文汉 2002 光学学报 22 1236
Google Scholar
Li X Y, Jiang W H 2002 Acta Opt. Sin. 22 1236
Google Scholar
[21] 马昌凤 2010 最优化方法及其Matlab程序设计 (北京: 科学出版社) 第15页
Ma C F 2010 Optimization Method and Matlab Programming (Beijing: Science Press) p15 (in Chinese)


 下载:
下载:
计量
- 文章访问数: 10674
- PDF下载量: 104
- 被引次数: 0
