










-
天线的方向系数是天线的核心性能指标之一, 准确计算方向系数是高性能天线应用的核心要求. 本文基于平面近场测试理论、实测数据和快速傅里叶变换算法, 系统阐述基于近场测试来数值计算天线方向系数的原理, 并进行深入的误差分析. 本文选择一种方向图函数和方向系数已知的被测天线, 来检验所讨论的误差评估方案. 评估分两步实现, 第一步, 针对这一天线, 采用标准的近场测试配置, 仿真模拟出(相当于实际测量出)一套平面近场数据. 第二步, 基于这套近场数据, 利用数值积分计算出天线方向系数. 本文使用或提出了四种数值算法, 分析了提出的后三种算法本身的误差来源, 并开发出程序搜索方案, 确定出后两种算法的最小误差界. 随后, 利用这四种数值算法分别得出天线的方向系数. 结果表明, 计算所得的近场方向系数都比真实方向系数大, 但误差不超过0.6 dB. 这一结果对实际应用中正确评估基于近场测试的天线方向系数准确性有重要参考价值.Directivity is one of the core performance parameters for an antenna, and its accurate computation and measurement have been receiving attention in the past decades. While quite a number of computational methods for antenna directivity are developed, a comprehensive comparison among these methods, including their advantages and disadvantages, has not yet been reported. In the literature, most of these methods can be roughly classified as two categories, i.e. numerical methods and analytical methods. The numerical methods include those simplified numerical methods for accessing the radiation pattern. For example, some methods assume that the radiation pattern is only elevation-angle dependent, and an approximate truncation of the integral interval is often employed. The analytical methods are developed, where the electromagnetic radiation intensity and the total radiation power for a specific antenna are derived analytically. Nevertheless, so far there have been less efforts dedicated to developing general computational methods based on the antenna's planar near-field theory and associated computational schemes, although indeed quite a few of advanced mathematical approaches have been used to obtain the accurate directivity, including the series expansion based on the spherical wave scheme and the Fourier expansion scheme. In spite of these efforts, one can see that a general accurate numerical scheme for the antenna directivity is still urgently required. As an important supplement to these efforts, this paper adopts or proposes four numerical integration methods regarding planar near-field measurement of the antennas under test. Based on the planar near-field theory, microwave near-field data, and fast Fourier transform (FFT), this paper discusses the numerical integration-based algorithm schemes based on the simulated (or measured) near-field data and relevant numerical uncertainty estimation. Specifically, an antenna with accurate directivity is chosen for illustrating the accuracy assessment. First, a set of near-field data under the well-established probing condition is simulated and then used as an input for subsequent numerical calculation of the antenna directivity value. Four different numerical integration methods are employed and their possible numerical errors are discussed. Consequently, the antenna directivity values are obtained respectively from the four different numerical methods. It is revealed that the numerically evaluated directivity values from the near-field data are roughly at most 0.6 dB larger than the accurate value. This work represents a substantial step toward a reliable estimation of the antenna directivity from the near-field data of an antenna.
-
Keywords:
- antenna /
- directivity /
- numerical integration /
- approximation
[1] 魏文元, 宫德明, 陈必森 1985 天线原理 (第1版) (北京: 国防工业出版社) 第34—35页
Wei W Y, Gong D M, Chen B S 1985 Principles of Antennas (1st ed.) (Beijing: National Defense Industry Press) pp34–35 (in Chinese)
[2] 毛乃宏, 俱新德 1987 天线测量手册 (北京: 国防工业出版社) 第229—236页
Mao N H, Ju X D 1987 Antenna Measurement Handbook (Beijing: National Defense Industry Press) pp229–236 (in Chinese)
[3] 刘俊群 2012 物理学报 61 238401
 Google Scholar
Google Scholar
Liu J Q 2012 Acta Phys. Sin. 61 238401
Google Scholar
[4] 黄建军, 李渠塘 1999 无线电通信技术 25 47
Huang J J, Li Q T 1999 Rad. Comm. Technol. 25 47
[5] 秦顺友 2002 电波科学学报 17 192
Google Scholar
Qin S Y 2002 Chin. J. Rad. Sci. 17 192
Google Scholar
[6] 陈辉, 秦顺友 2004 电子测量与仪器学报 18 29
Chen H, Qin S Y 2004 J. Electronic Meas. Instr. 18 29
[7] 文园 2007 硕士学位论文 (西安: 西安电子科技大学)
Wen Y 2007 M.S. Thesis (Xi’an: Xidian University) (in Chinese)
[8] 王均宏, 任朗 1993 西南交通大学学报 28 31
Wang J H, Ren L 1993 J. Southwest Jiaotong Univ. 28 31
[9] 陈宇, 舒挺, 郑世勇 2006 强激光与粒子束 18 431
ChenY, Shu T, Zheng S Y 2006 High Power Laser and Particle Beams 18 431
[10] 赵国伟, 徐跃民, 陈诚 2007 物理学报 56 5298
Google Scholar
Zhao G W, Xu Y M, Chen C 2007 Acta Phys. Sin. 56 5298
Google Scholar
[11] 王均宏, 任朗 1994 电子科学学刊 16 380
Wang J H, Ren L 1994 J. Electronics 16 380
[12] 王志伟 2011 无线电工程 41 41
Wang Z W 2011 Rad. E. 41 41
[13] 蒋双凤, 孔凡敏, 李康, 高晖 2011 物理学报 60 045203
Google Scholar
Jiang S F, Kong F M, Li K, Gao H 2011 Acta Phys. Sin. 60 045203
Google Scholar
[14] 郭蓉, 曹祥玉, 袁子东, 徐雪飞 2014 物理学报 63 244102
Google Scholar
Guo R, Cao X Y, Yuan Z D, Xu X F 2014 Acta Phys. Sin. 63 244102
Google Scholar
[15] Dich M 1997 IEEE Trans. Antennas Propag. 45 1502
Google Scholar
[16] Gennarelli C, Riccio G, Savarese C 2002 J. Electromagn. Waves Appl. 16 861
Google Scholar
[17] Das S, Mandal D, Ghoshal S P, Kar R 2017 IEEE Trans. Antennas Propag. 65 915
Google Scholar
[18] Mahony J D 2001 IEEE Antennas Propag. Mag. 43 88
Google Scholar
[19] Young J L, Wilson C D 2017 IEEE Trans. Antennas Propag. 65 4626
Google Scholar
[20] Wittmann R C, Alpert B K, Francis M H 1998 IEEE Trans. Antennas Propag. 46 716
Google Scholar
[21] Shampine L F 2008 Appl. Math. Comput. 202 266
-
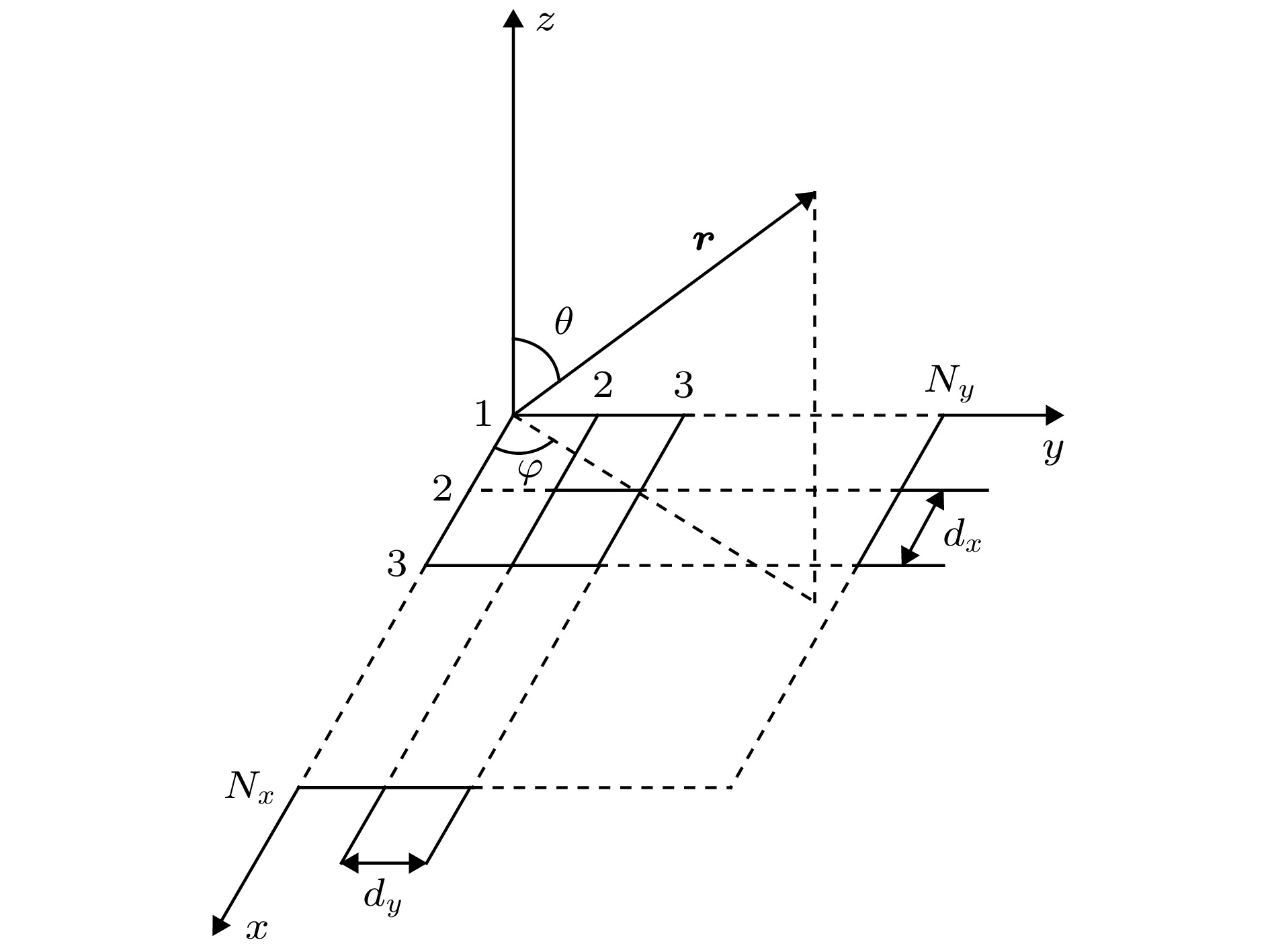
图 1 矩形阵列天线方向图函数求解坐标系
Fig. 1. The solution coordinate for the pattern of planar array antennas.
表 1 激励均匀分布四种方法方向系数计算比较评估
Table 1. Comparison and evaluation of four computation methods of directivity in uniform distribution of electromagnetic excitation.
方法 方向系数计算值/dB 误差分析、估计 计算时间/s 方法特点和局限 (20)式理论真值Dpa 40.9512 0; 应用方法4)对被测天线阵列本身进行数值积分, 结果为40.9512, INVuv误差界1.247607 × 10–8; 积分真值区间: [40.95119, 40.95129], 方法4)计算结果与被测天线理论真值近乎完全吻合, 就积分本身结果而言, 方法4)可作为积分真值参考基准 21.51 解析解, 公式应用范围
受限1) PNF 41.13 比真值偏大约0.18 dB 1.11 速度最快 2) 本文算法基础积分求和估算 40.9522 比真值偏大约0.001 dB 20.56 速度较快, 计算时间依赖于FFT点数和测试数据矩阵大小 3) 二维插值估计被积函数 40.9522 比真值偏大约0.001 dB, INVuv误差界1.247085 × 10–8, 积分真值区间: [40.9521, 40.9523] 211.78 速度较慢, 计算时间依赖于FFT点数和测试数据矩阵大小 4) 累加求和被积函数
解析值40.95218 比真值偏大约0.001 dB, quad2d()算法本身误差, 不存在被积函数值误差, INVuv误差界9.120334 × 10–9, 积分真值区间: [40.952139, 40.952217] 1895.52 速度最慢, 计算时间依赖于近场测试数据矩阵大小, 本例为104 × 156, 最佳逼近积分真值  下载: 导出CSV
下载: 导出CSV
表 7 激励均匀分布幅相误差随机正态分布四种方法方向系数计算比较评估
Table 7. Comparison and evaluation of four computation methods of directivity in uniform distribution of electromagnetic excitation with normal random errors for amplitude & phase.
方法 方向系数计算值/dB 误差分析、估计 计算时间/s 方法特点和局限 (21)式理论真值Dpa 13.5284 0; 应用方法4)对被测天线阵列本身进行数值积分, 结果为13.5299, INVuv误差界1.248662 × 10–4; 积分真值区间: [13.52897, 13.53091], 方法4)计算结果与被测天线理论真值接近完全符合, 就积分本身结果而言, 方法4)可作为积分真值参考基准. 24.84 解析解, 公式应用范围
受限1) PNF 13.73 比真值大约0.2 dB 1.03 速度最快 2) 本文算法基础积分求和估算 13.8459 比真值偏大约0.33 dB 20.34 速度较快, 计算时间依赖于FFT点数和测试数据矩阵大小 3) 二维插值估计被积函数 13.8598 比真值偏大约0.33 dB, INVuv误差界1.249746 × 10–3, 真值区间: [13.8493, 13.8703] 310.81 速度较慢, 计算时间依赖于FFT点数和测试数据矩阵大小 4) 累加求和被积函数解析值 13.8184 比真值偏大约0.29 dB, quad2d()算法本身误差, INVuv误差界3.546120 × 10–4, 真值区间: [13.8154, 13.8213] 1611.23 速度最慢, 计算时间依赖于近场测试数据矩阵大小, 本例为104 × 156, 最佳逼近积分真值
下载: 导出CSV
表 2 激励幅度均匀相位扫描分布四种方法方向系数计算比较评估
Table 2. Comparison and evaluation of four computation methods of directivity in uniform amplitude & linear scanning phase distribution of electromagnetic excitation.
方法 方向系数计算值/dB 误差分析、估计 计算时间/s 方法特点和局限 (20)式理论真值Dpa 38.9473 0; 应用方法(4)对被测天线阵列本身进行数值积分, 结果为38.9474, INVuv误差界2.257101 × 10–8; 积分真值区间: [38.94733, 38.94746], 方法4)计算结果与被测天线理论真值近乎完全符合, 就积分本身结果而言, 方法4)可作为积分真值参考基准 20.92 解析解, 公式应用范围
受限1) PNF 39.33 比真值偏大约0.38 dB 1.12 速度最快 2) 本文算法基础积分求和估算 39.2175 比真值偏大约0.27 dB 20.92 速度较快, 计算时间依赖于FFT点数和测试数据矩阵大小 3) 二维插值估计被积函数 39.2142 比真值偏大约0.27 dB, INVuv误差界1.248032 × 10–7, 积分真值区间: [39.21385, 39.21457] 201.61 速度较慢, 计算时间依赖于FFT点数和测试数据矩阵大小 4) 累加求和被积函数解析值 39.2023 比真值偏大约0.25 dB, quad2d()算法本身误差, INVuv误差界2. 873319 × 10–8, 积分真值区间: [39.20225, 39.20241] 1276.35 速度最慢, 计算时间依赖于近场测试数据矩阵大小, 本例为104 × 156, 最佳逼近积分真值
下载: 导出CSV
表 3 激励Taylor分布四种方法方向系数计算比较评估
Table 3. Comparison and evaluation of four computation methods of directivity in Taylor distribution of electromagnetic excitation.
方法 方向系数计算值/dB 误差分析、估计 计算时间/s 方法特点和局限 (20)式理论真值Dpa 37.8093 0; 应用方法4)对被测天线阵列本身进行数值积分, 结果为37.809329, INVuv误差界6.831371 × 10–10; 积分真值区间: [37.809327, 37.809330], 方法4)计算结果与被测天线理论真值近乎完全符合, 就积分本身结果而言, 方法4)可作为积分真值参考基准 21.47 解析解, 公式应用范围
受限1) PNF 38.40 比真值偏大约0.59 dB 1.04 速度最快 2) 本文算法基础积分求和估算 38.1953 比真值偏大约0.39 dB 20.65 速度较快, 计算时间依赖于FFT点数和测试数据矩阵大小 3) 二维插值估计被积函数 38.2152 比真值偏大约0.4 dB, INVuv误差界1.249154 × 10–8, 真值区间: [38.21517, 38.21523] 189.59 速度较慢, 计算时间依赖于FFT点数和测试数据矩阵大小 4) 累加求和被积函数解析值 38.190513 比真值偏大约0.38 dB, quad2d()算法本身误差, INVuv误差界1.248422 × 10–9, 真值区间: [38.19051, 38.190516] 1465.8 速度最慢, 计算时间依赖于近场测试数据矩阵大小, 本例为104 × 156, 最佳逼近积分真值
下载: 导出CSV
表 4 激励Taylor分布FFT精度提高四种方法方向系数计算比较评估
Table 4. Comparison and evaluation of four computation methods of directivity in Taylor distribution of electromagnetic excitation with raised precision of FFT algorithm.
方法 方向系数计算值/dB 误差分析、估计 计算时间/s 方法特点和局限 (20)式理论真值Dpa 37.8093 0; 应用方法4)对被测天线阵列本身进行数值积分, 结果为37.809329, INVuv误差界6.831371 × 10–10; 积分真值区间: [37.809327, 37.809330], 方法4)计算结果与被测天线理论真值近乎完全符合, 就积分本身结果而言, 方法4)可作为积分真值参考基准. 21.18 解析解, 公式应用范围
受限1) PNF 38.36 比真值偏大0.56 dB, 结果因FFT点数变化与表3相比略有变化 1.09 速度最快, 本例FFT点数为211 × 211, 其他算例FFT点数都为210 × 210 2) 本文算法基础积分求和估算 38.1533 比真值偏大0.34 dB 82.18 计算时间加长, 计算时间依赖于FFT点数和测试数据矩阵大小 3) 二维插值估计被积函数 38.1535 比真值偏大0.34 dB, INVuv误差界1.805049 × 10–8, 真值区间: [38.153468, 38.153549] 900.46 计算时间长, 计算时间依赖于FFT点数和测试数据矩阵大小, 实用性减弱 4) 累加求和被积函数解析值 38.13822 比真值偏大0.33 dB, quad2d()算法本身误差, INVuv误差界1.247355 × 10–9, 真值区间: [38.138217, 38.138222], 结果因FFT点数变化造成最大值略有变化, 最终结果与表3相比略有变化 1468.83 速度较慢, 计算时间依赖于近场测试数据矩阵大小, 本例为104 × 156, 最佳逼近积分真值
下载: 导出CSV
表 5 激励Taylor分布幅相误差随机均匀分布四种方法方向系数计算比较评估
Table 5. Comparison and evaluation of four computation methods of directivity in Taylor distribution of electromagnetic excitation with uniform random errors for amplitude & phase.
方法 方向系数计算值/dB 误差分析、估计 计算时间/s 方法特点和局限 (21)式理论真值Dpa 13.3604 0; 应用方法4)对被测天线阵列本身进行数值积分, 结果为13.3604, INVuv误差界3.473624 × 10–5; 积分真值区间: [13.3602, 13.3607], 方法4)计算结果与被测天线理论真值近乎完全符合, 就积分本身结果而言, 方法4)可作为积分真值参考基准. 25.09 解析解, 公式应用范围
受限1) PNF 13.63 比真值大约0.27 dB 1.03 速度最快 2) 本文算法基础积分求和估算 13.6866 比真值偏大约0.33 dB 20.25 速度较快, 计算时间依赖于FFT点数和测试数据矩阵大小 3) 二维插值估计被积函数 13.6806 比真值偏大约0.32 dB, INVuv误差界7.892290 × 10–4, 真值区间: [13.6742, 13.6870] 279.98 速度较慢, 计算时间依赖于FFT点数和测试数据矩阵大小 4) 累加求和被积函数解析值 13.6580 比真值偏大约0.30 dB, quad2d()算法本身误差, INVuv误差界1. 382844 × 10–4, 真值区间: [13.6569, 13.6592] 1259.79 速度最慢, 计算时间依赖于近场测试数据矩阵大小, 本例为104 × 156, 最佳逼近积分真值
下载: 导出CSV
表 6 激励Taylor分布幅相误差随机正态分布四种方法方向系数计算比较评估
Table 6. Comparison and evaluation of four computation methods of directivity in Taylor distribution of electromagnetic excitation with normal random errors for amplitude & phase.
方法 方向系数计算值/dB 误差分析、估计 计算时间/s 方法特点和局限 (21)式理论真值Dpa 12.6206 0; 应用方法4)对被测天线阵列本身进行数值积分, 结果为12.6213, INVuv误差界1.249209 × 10–4; 积分真值区间: [12.6205, 12.6220], 方法4)计算结果与被测天线理论真值近乎完全符合, 就积分本身结果而言, 方法4)可作为积分真值参考基准 24.84 解析解, 公式应用范围
受限1) PNF 12.90 比真值偏大约0.28 dB 1 速度最快 2) 本文算法基础积分求和估算 13.0038 比真值偏大约0.38 dB 20.40 速度较快, 计算时间依赖于FFT点数和测试数据矩阵大小 3) 二维插值估计被积函数 13.0030 比真值偏大约0.38 dB, INVuv误差界1.249323 × 10–3, 真值区间: [12.9943, 13.0116] 297.41 速度较慢, 计算时间依赖于FFT点数和测试数据矩阵大小 4) 累加求和被积函数解析值 12.9737 比真值偏大约0.35 dB, quad2d()算法本身误差, INVuv误差界2.116856 × 10–4, 真值区间: [12.9722, 12.9751] 1561.10 速度最慢, 计算时间依赖于近场测试数据矩阵大小, 本例为104 × 156, 最佳逼近积分真值
下载: 导出CSV
-
[1] 魏文元, 宫德明, 陈必森 1985 天线原理 (第1版) (北京: 国防工业出版社) 第34—35页
Wei W Y, Gong D M, Chen B S 1985 Principles of Antennas (1st ed.) (Beijing: National Defense Industry Press) pp34–35 (in Chinese)
[2] 毛乃宏, 俱新德 1987 天线测量手册 (北京: 国防工业出版社) 第229—236页
Mao N H, Ju X D 1987 Antenna Measurement Handbook (Beijing: National Defense Industry Press) pp229–236 (in Chinese)
[3] 刘俊群 2012 物理学报 61 238401
Google Scholar
Liu J Q 2012 Acta Phys. Sin. 61 238401
Google Scholar
[4] 黄建军, 李渠塘 1999 无线电通信技术 25 47
Huang J J, Li Q T 1999 Rad. Comm. Technol. 25 47
[5] 秦顺友 2002 电波科学学报 17 192
Google Scholar
Qin S Y 2002 Chin. J. Rad. Sci. 17 192
Google Scholar
[6] 陈辉, 秦顺友 2004 电子测量与仪器学报 18 29
Chen H, Qin S Y 2004 J. Electronic Meas. Instr. 18 29
[7] 文园 2007 硕士学位论文 (西安: 西安电子科技大学)
Wen Y 2007 M.S. Thesis (Xi’an: Xidian University) (in Chinese)
[8] 王均宏, 任朗 1993 西南交通大学学报 28 31
Wang J H, Ren L 1993 J. Southwest Jiaotong Univ. 28 31
[9] 陈宇, 舒挺, 郑世勇 2006 强激光与粒子束 18 431
ChenY, Shu T, Zheng S Y 2006 High Power Laser and Particle Beams 18 431
[10] 赵国伟, 徐跃民, 陈诚 2007 物理学报 56 5298
Google Scholar
Zhao G W, Xu Y M, Chen C 2007 Acta Phys. Sin. 56 5298
Google Scholar
[11] 王均宏, 任朗 1994 电子科学学刊 16 380
Wang J H, Ren L 1994 J. Electronics 16 380
[12] 王志伟 2011 无线电工程 41 41
Wang Z W 2011 Rad. E. 41 41
[13] 蒋双凤, 孔凡敏, 李康, 高晖 2011 物理学报 60 045203
Google Scholar
Jiang S F, Kong F M, Li K, Gao H 2011 Acta Phys. Sin. 60 045203
Google Scholar
[14] 郭蓉, 曹祥玉, 袁子东, 徐雪飞 2014 物理学报 63 244102
Google Scholar
Guo R, Cao X Y, Yuan Z D, Xu X F 2014 Acta Phys. Sin. 63 244102
Google Scholar
[15] Dich M 1997 IEEE Trans. Antennas Propag. 45 1502
Google Scholar
[16] Gennarelli C, Riccio G, Savarese C 2002 J. Electromagn. Waves Appl. 16 861
Google Scholar
[17] Das S, Mandal D, Ghoshal S P, Kar R 2017 IEEE Trans. Antennas Propag. 65 915
Google Scholar
[18] Mahony J D 2001 IEEE Antennas Propag. Mag. 43 88
Google Scholar
[19] Young J L, Wilson C D 2017 IEEE Trans. Antennas Propag. 65 4626
Google Scholar
[20] Wittmann R C, Alpert B K, Francis M H 1998 IEEE Trans. Antennas Propag. 46 716
Google Scholar
[21] Shampine L F 2008 Appl. Math. Comput. 202 266

 下载:
下载:
计量
- 文章访问数: 13439
- PDF下载量: 100
- 被引次数: 0
