










-
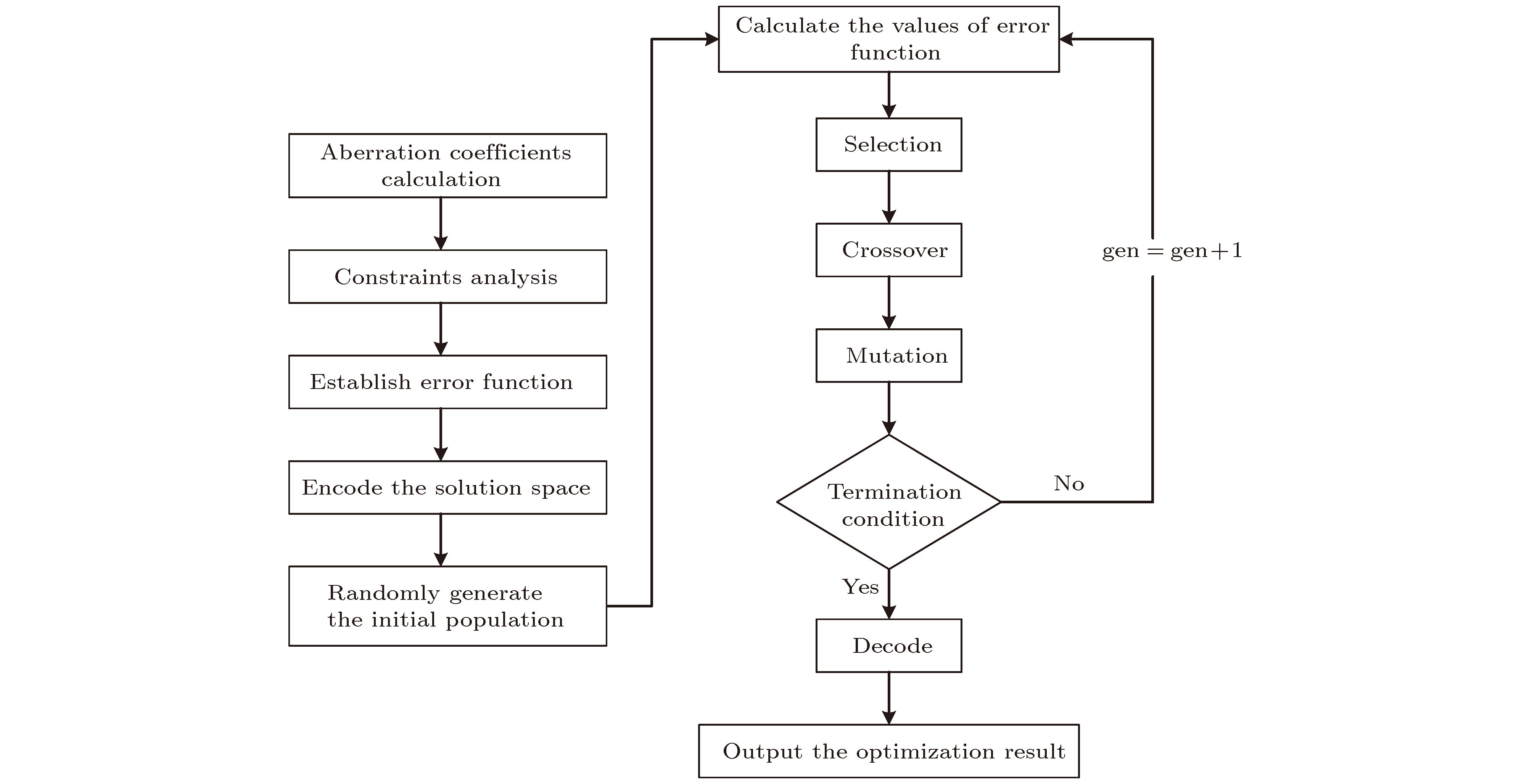
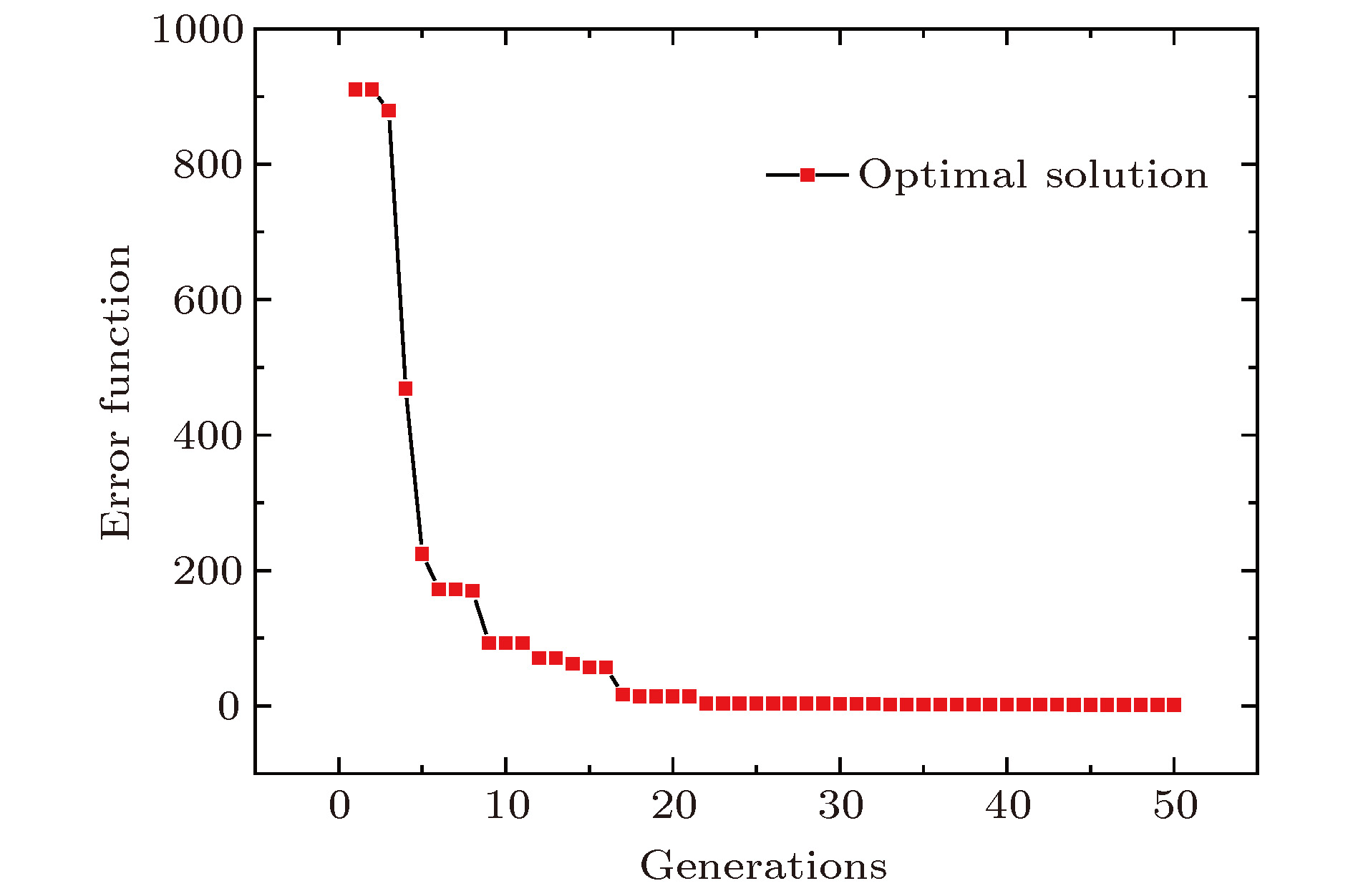
传统的离轴反射光学系统初始结构设计方法是先求取轴对称反射光学系统结构, 然后通过光瞳离轴、视场离轴或二者结合的方法实现无遮拦设计. 由于同轴光学系统像差分布规律不适用于离轴光学系统, 因此离轴后的反射光学系统结构像差较大, 而且系统无遮拦设计过程复杂. 本文提出了一种基于矢量像差理论的离轴反射光学系统初始结构设计方法, 可以直接获取光瞳离轴、视场离轴或二者结合的无遮拦离轴反射光学系统初始结构. 该方法可以获得较好的离轴反射光学系统初始结构供光学设计软件进一步优化. 针对面阵探测器, 设计了一个长波红外离轴三反光学系统, 通过光瞳离轴和视场离轴实现无遮拦设计, 光学系统成像质量好, 反射镜不存在倾斜和偏心, 光学系统易于装调.The traditional method of designing the initial configuration of off-axis reflective optical system is to first obtain the initial configuration of coaxial reflective optical system, and then achieve the unobscured design with an offset aperture stop or a biased input field, or both. Because the aberration distribution of coaxial reflective optical system is not applicable to the off-axis reflective optical system, the obtained unobscured off-axis reflective optical system has large aberration, and the unobscured design process is complicated. In this paper we present a method of designing an initial configuration of off-axis reflective optical system based on vector aberration theory. With this design method, a good unobscured initial configuration of off-axis reflective optical system can be directly obtained by using an offset aperture stop or a biased input field, or both. Based on the vector aberration theory and gaussian brackets, the third-order aberration coefficient is derived for off-axis reflective optical system. Initial configuration performance is important for optical design, especially for the complicated optical system design. The selection of initial configuration highly affects the final system imaging performance, fabrication difficulty and alignment difficulty. An error function is established to evaluate the performance of off-axis reflective optical system, and it consists of aberration coefficients and other constraints. The genetic algorithm is a highly parallel, random and adaptive global optimization algorithm. To obtain a good initial configuration for the off-axis reflective optical system, the genetic algorithm is used to search for the initial configuration with minimum residual aberration. This method can obtain a good initial configuration of off-axis reflective optical system for further optimization. The benefit of this design method is demonstrated by designing an off-axis three-mirror optical system. For the focal plane array, a long-wave infrared off-axis three-mirror optical system is designed. A good initial configuration is obtained with the proposed method, which achieves the unobscured design by using an offset aperture stop and a biased input field. To improve the performance of initial configuration, the obtained initial configuration is optimized with the optical design software. The designed optical system has good imaging quality. As the mirrors are free from the tilts and decenters, the designed optical system is aligned easily.
[1] 沈本兰, 常军, 王希, 牛亚军, 冯树龙 2014 物理学报 63 144201
 Google Scholar
Google Scholar
Shen B L, Chang J, Wang X, Niu Y J, Feng S L 2014 Acta Phys. Sin. 63 144201
Google Scholar
[2] Jiang Z Y, Li L, Huang Y F 2009 Chin. Phys. B 18 2774
Google Scholar
[3] Fuerschbach K, Davis G E, Thompson K P, Rolland J P 2014 Opt. Lett. 39 2896
Google Scholar
[4] Meng Q Y, Wang H Y, Wang K J, Wang Y, Ji Z H, Wang D 2016 Appl. Opt. 55 8962
Google Scholar
[5] Nie Y F, Gross H, Zhong Y, Duerr F 2017 Appl. Opt. 56 5630
Google Scholar
[6] 刘军, 刘伟奇, 康玉思, 吕博, 冯睿, 柳华, 魏忠伦 2013 光学学报 33 1022002
Liu J, Liu W Q, Kang Y S, Lü B, Feng R, Liu H, Wei Z L 2013 Acta Opt. Sin. 33 1022002
[7] 徐奉刚, 黄玮, 徐明飞 2016 光学学报 36 1222002
Xu F G, Huang W, Xu M F 2016 Acta Opt. Sin. 36 1222002
[8] 李东熙, 卢振武, 孙强, 刘华, 张云翠 2007 物理学报 56 5766
Google Scholar
Li D X, Lu Z W, Sun Q, Liu H, Zhang Y C 2007 Acta Phys. Sin. 56 5766
Google Scholar
[9] 夏春秋, 钟兴, 金光 2015 光学学报 35 0922002
Xia C Q, Zhong X, Jin G 2015 Acta Opt. Sin. 35 0922002
[10] Thompson K P 2005 J. Opt. Soc. Am. A 22 1389
Google Scholar
[11] 孙金霞, 潘国庆, 刘英 2013 物理学报 62 094203
Google Scholar
Sun J X, Pan G Q, Liu Y 2013 Acta Phys. Sin. 62 094203
Google Scholar
[12] Wang Y, Zhang X, Wang L J, Wang C 2014 Chin. Phys. B 23 014202
Google Scholar
[13] Schmid T, Rolland J P, Rakich A, Thompson K P 2010 Opt. Express 18 17433
Google Scholar
[14] Zhong Y, Gross H 2017 Opt. Express 25 10016
Google Scholar
[15] Shi H D, Jiang H L, Zhang X, Wang C, Liu T 2016 Appl. Opt. 55 6782
Google Scholar
[16] 庞志海, 樊学武, 任国瑞, 丁蛟腾, 徐亮, 凤良杰 2016 红外与激光工程 45 0618002
Pang Z H, Fan X W, Ren G R, Ding J T, Xu L, Feng L J 2016 Infrared Laser Eng. 45 0618002
[17] Thompson K P 1980 Ph. D. Dissertation (Tucson: University of Arizona)
[18] 邱立军, 付霖宇, 董琪, 顾钧元 2018 兵器装备工程学报 39 88
Google Scholar
Qiu L J, Fu L Y, Dong Q, Gu J Y 2018 J. Ordan. Equip. Eng. 39 88
Google Scholar
[19] Yan F, Zhang X J 2009 Opt. Express 17 16809
Google Scholar
[20] Zhou G Y, Chen Y X, Wang Z G, Song H W 1999 Appl. Opt. 38 4281
Google Scholar
-
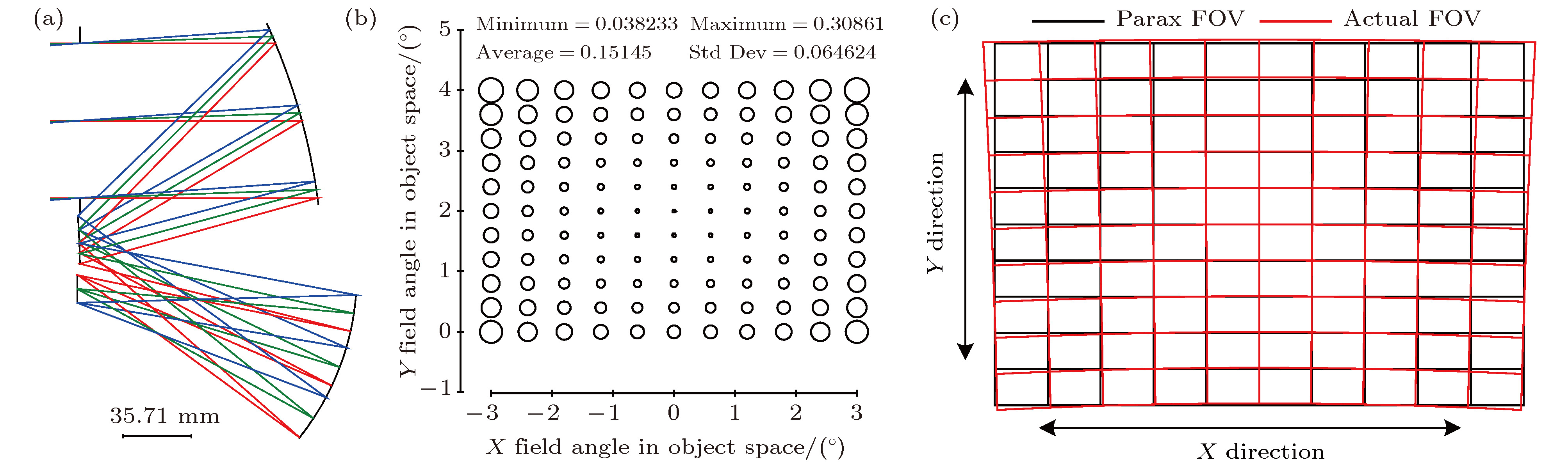
图 5 离轴三反光学系统初始结构性能分析 (a)系统布局; (b)点列图均方根直径; (c)畸变网格
Fig. 5. Initial configurationperformance analysis of the designed system: (a) System layout; (b) RMS spot diameter; (c) distortion grid.
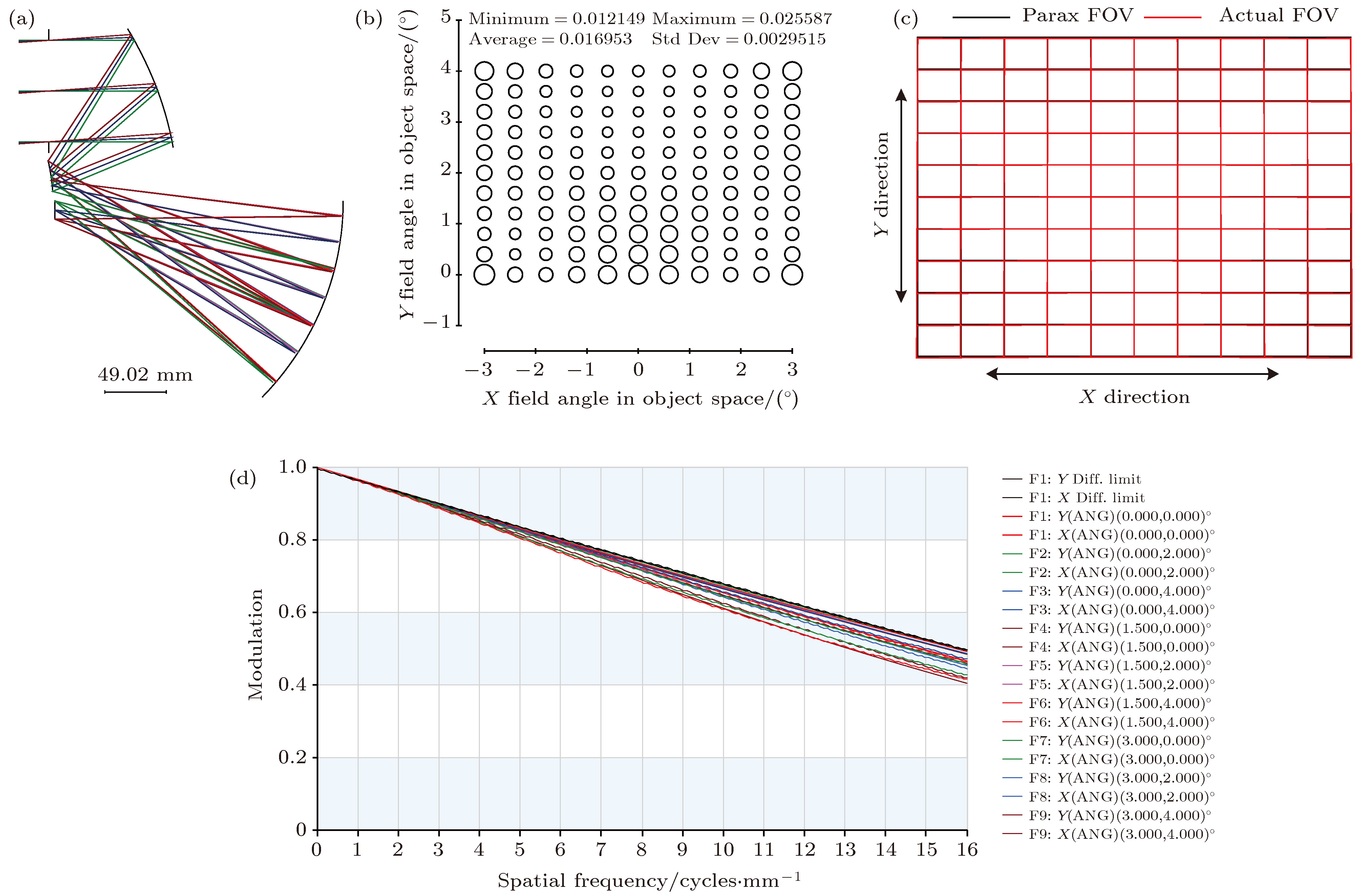
图 6 离轴三反光学系统性能分析 (a)系统布局; (b)点列图均方根直径; (c)畸变网格; (d)调制传递函数
Fig. 6. Performance analysis of the designed system: (a) System layout; (b) RMS spot diameter; (c) distortion grid; (d) MTF.
表 1 系统参数
Table 1. System specifications.
Parameter Specification Wavelength range/μm 8 to 12 Focal length/mm 200 F-number 2.5 Field of view 4° × 6° Pixel size/μm 30  下载: 导出CSV
下载: 导出CSV
表 2 参数范围和求解结果
Table 2. Parameters ranges and solution of designed system.
Parameter Range Solution d1/mm d1 = –d2 126.4621 d2/mm [–200, –50] –126.4621 d3/mm [50, 200] 144.1817 r1/mm [–500, –50] –297.3433 r2/mm [–500, –50] –451.5485 r3/mm [–500, –50] –131.0513 k1 [–5, 5] –0.5789 k2 [–5, 5] 4.7595 k3 [–5, 5] –0.1263
下载: 导出CSV
-
[1] 沈本兰, 常军, 王希, 牛亚军, 冯树龙 2014 物理学报 63 144201
Google Scholar
Shen B L, Chang J, Wang X, Niu Y J, Feng S L 2014 Acta Phys. Sin. 63 144201
Google Scholar
[2] Jiang Z Y, Li L, Huang Y F 2009 Chin. Phys. B 18 2774
Google Scholar
[3] Fuerschbach K, Davis G E, Thompson K P, Rolland J P 2014 Opt. Lett. 39 2896
Google Scholar
[4] Meng Q Y, Wang H Y, Wang K J, Wang Y, Ji Z H, Wang D 2016 Appl. Opt. 55 8962
Google Scholar
[5] Nie Y F, Gross H, Zhong Y, Duerr F 2017 Appl. Opt. 56 5630
Google Scholar
[6] 刘军, 刘伟奇, 康玉思, 吕博, 冯睿, 柳华, 魏忠伦 2013 光学学报 33 1022002
Liu J, Liu W Q, Kang Y S, Lü B, Feng R, Liu H, Wei Z L 2013 Acta Opt. Sin. 33 1022002
[7] 徐奉刚, 黄玮, 徐明飞 2016 光学学报 36 1222002
Xu F G, Huang W, Xu M F 2016 Acta Opt. Sin. 36 1222002
[8] 李东熙, 卢振武, 孙强, 刘华, 张云翠 2007 物理学报 56 5766
Google Scholar
Li D X, Lu Z W, Sun Q, Liu H, Zhang Y C 2007 Acta Phys. Sin. 56 5766
Google Scholar
[9] 夏春秋, 钟兴, 金光 2015 光学学报 35 0922002
Xia C Q, Zhong X, Jin G 2015 Acta Opt. Sin. 35 0922002
[10] Thompson K P 2005 J. Opt. Soc. Am. A 22 1389
Google Scholar
[11] 孙金霞, 潘国庆, 刘英 2013 物理学报 62 094203
Google Scholar
Sun J X, Pan G Q, Liu Y 2013 Acta Phys. Sin. 62 094203
Google Scholar
[12] Wang Y, Zhang X, Wang L J, Wang C 2014 Chin. Phys. B 23 014202
Google Scholar
[13] Schmid T, Rolland J P, Rakich A, Thompson K P 2010 Opt. Express 18 17433
Google Scholar
[14] Zhong Y, Gross H 2017 Opt. Express 25 10016
Google Scholar
[15] Shi H D, Jiang H L, Zhang X, Wang C, Liu T 2016 Appl. Opt. 55 6782
Google Scholar
[16] 庞志海, 樊学武, 任国瑞, 丁蛟腾, 徐亮, 凤良杰 2016 红外与激光工程 45 0618002
Pang Z H, Fan X W, Ren G R, Ding J T, Xu L, Feng L J 2016 Infrared Laser Eng. 45 0618002
[17] Thompson K P 1980 Ph. D. Dissertation (Tucson: University of Arizona)
[18] 邱立军, 付霖宇, 董琪, 顾钧元 2018 兵器装备工程学报 39 88
Google Scholar
Qiu L J, Fu L Y, Dong Q, Gu J Y 2018 J. Ordan. Equip. Eng. 39 88
Google Scholar
[19] Yan F, Zhang X J 2009 Opt. Express 17 16809
Google Scholar
[20] Zhou G Y, Chen Y X, Wang Z G, Song H W 1999 Appl. Opt. 38 4281
Google Scholar

 下载:
下载:
计量
- 文章访问数: 20601
- PDF下载量: 280
- 被引次数: 0
