










-
搭建了一种基于电动可调焦透镜(electrically tunable lens)的大范围快速光片荧光显微成像系统. 通过引入电动可调焦透镜与一维振镜以实现成像物平面和光片位置的快速移动, 再结合高速sCMOS完成快速光片荧光显微成像. 另外实验中通过改善光路与提升动态成像质量, 实现了大范围扫描并减少了伪像. 最终对成像性能进行测试, 本系统的纵向分辨率和横向分辨率分别达到约5.5 μm和约0.7 μm, 单幅图像稳定成像的速度约为275 frames/s, 成像深度可超过138 μm, 能满足对具有一定尺寸的生物样本进行实时清晰成像的需求.Fluorescence microscopic imaging technology realizes specific imaging by labeling biological tissue with fluorescence molecules, which has a high signal-to-noise ratio and has been widely used in the field of medical biology research. Some typical fluorescence microscopy techniques, such as confocal microscopy and two-photon microscopy, have high fluorescence intensity, but the long exposure can cause phototoxicity and photobleaching of biological tissue, which is difficult to meet the demand for long-time observation or noninvasive imaging. Then, light sheet fluorescence microscopy (LSFM) has become a hot research topic in fluorescence micro-imaging in recent years due to its fast speed, high resolution, low photobleaching and low phototoxicity. The imaging speed of a typical light sheet microscopy is not fast enough to observe fast biological activities such as transmission of neural signals, blood flow, and heart beats. At present, many reported light-sheet fluorescence microscopies still have some problems such as fixed imaging surface, slow imaging speed, small imaging depth or residual artifacts. Therefore, in this paper, a rapid light-sheet fluorescence microscopy based on electrically tunable lens is built. To achieve the rapid movement of the focal plane of the detection objective lens, the electrically tunable lens is introduced to meet the reqirement for fast changing of the diopter. Similarly, the rapid movement of light sheet is achieved by introducing one-dimensional galvanometer to change the rotation angle. Fast imaging requires the light sheet and focal plane to overlap in real time, which is then combined with a high-speed sCMOS receiving fluorescence to complete the whole imaging. In the experiment, the vertical depth significantly increases by modifying the optical path, and the LABVIEW programming is used to coordinate and improve the dynamic imaging quality, which effectively reduces the artifacts generated in rapid imaging. Finally, an imaging speed of 275 frames/s with a lateral resolution of ~0.73 μm, vertical resolution of ~5.5 μm, and an imaging depth of ~138 μm is achieved. This is of significance for developing the real-time and non-invasive imaging of living biological tissues.
[1] Zhang M X, Zhang J, Wang J, Achimovich A M, Aziz A A, Corbitt J, Acton S T, Gahlmann A 2019 Biophys. J. 116 25a
[2] Rocha M D, During D N, Bethge P, Voigt F F, Hildebrand S, Helmchen F, Pfeifer A, Hahnloser R H R, Gahr M 2019 Front. Neuroanat. 13 13
 Google Scholar
Google Scholar
[3] Ahrens M B, Orger M B, Robson D N, Li J M, Keller P J 2013 Nat. Methods 10 413
Google Scholar
[4] Huisken J, Swoger J, Del Bene F, Wittbrodt J, Stelzer E H 2004 Science 305 1007
Google Scholar
[5] Huisken J, Stainier D Y R 2009 Development 136 1963
Google Scholar
[6] Rasmi C K, Madhangi M, Nongthomba U, Mondal P P 2016 Microsc. Res. Techniq. 79 455
Google Scholar
[7] Wu Y C, Ghitani A, Christensen R, Santella A, Du Z, Rondeau G, Bao Z R, Colon-Ramos D, Shroff H 2011 Proc. Natl. Acad. Sci. U.S.A. 108 17708
Google Scholar
[8] Lemon W C, Pulver S R, Hockendorf B, McDole K, Branson K, Freeman J, Keller P J 2015 Nat. Commun. 6 7924
Google Scholar
[9] Kumar S, Wilding D, Sikkel M B, Lyon A R, MacLeod K T, Dunsby C 2011 Opt. Express 19 13839
Google Scholar
[10] Wu D, Zhou X, Yao B L, Li R Z, Yang Y L, Peng T, Lei M, Dan D, Ye T 2015 Appl. Opt. 54 8632
Google Scholar
[11] Ma P, Chan D C, Gu S, Watanabe M, Jenkins M W, Rollins A M 2016 Biomed. Opt. Express 7 5120
Google Scholar
[12] 安坤, 王晶, 梁东, 刘军 2017 中国激光 44 274
An K, Wang J, Liang D, Liu J 2017 Chin. J. Lasers 44 274
[13] Hedde P N, Gratton E 2018 Microsc. Res. Techniq. 81 924
Google Scholar
[14] Fei P, Lee J, Packard R R S, Sereti K I, Xu H, Ma J G, Ding Y C, Kang H, Chen H, Sung K, Kulkarni R, Ardehali R, Kuo C C J, Xu X L, Ho C M, Hsiai T K 2016 Sci. Rep. 6 22489
Google Scholar
[15] Haslehurst P, Yang Z Y, Dholakia K, Emptage N 2018 Biomed. Opt. Express 9 2154
Google Scholar
[16] Kashekodi A B, Meinert T, Michiels R, Rohrbach A 2018 Biomed. Opt. Express 9 4263
Google Scholar
[17] Fahrbach F O, Voigt F F, Schmid B, Helmchen F, Huisken J 2013 Opt. Express 21 21010
Google Scholar
[18] Landry J R, Itoh R, Li J M, Hamann S S, Mandella M, Contag C H, Solgaard O 2019 J. Biomed. Opt. 24 4
[19] Guan Z, Lee J, Jiang H, Dong S Y, Jen N, Hsiai T, Ho C M, Fei P 2016 Biomed. Opt. Express 7 194
Google Scholar
[20] Ritter J G, Veith R, Siebrasse J P, Kubitscheck U 2008 Opt. Express 16 7142
Google Scholar
[21] Engelbrecht C J, Stelzer E H 2006 Opt. Lett. 31 1477
Google Scholar
[22] 张球, 梁东, 白丽华, 刘军 2019 中国激光 46 279
Zhang Q, Liang D, Bai L H, Liu J 2019 Chin. J. Lasers 46 279
-
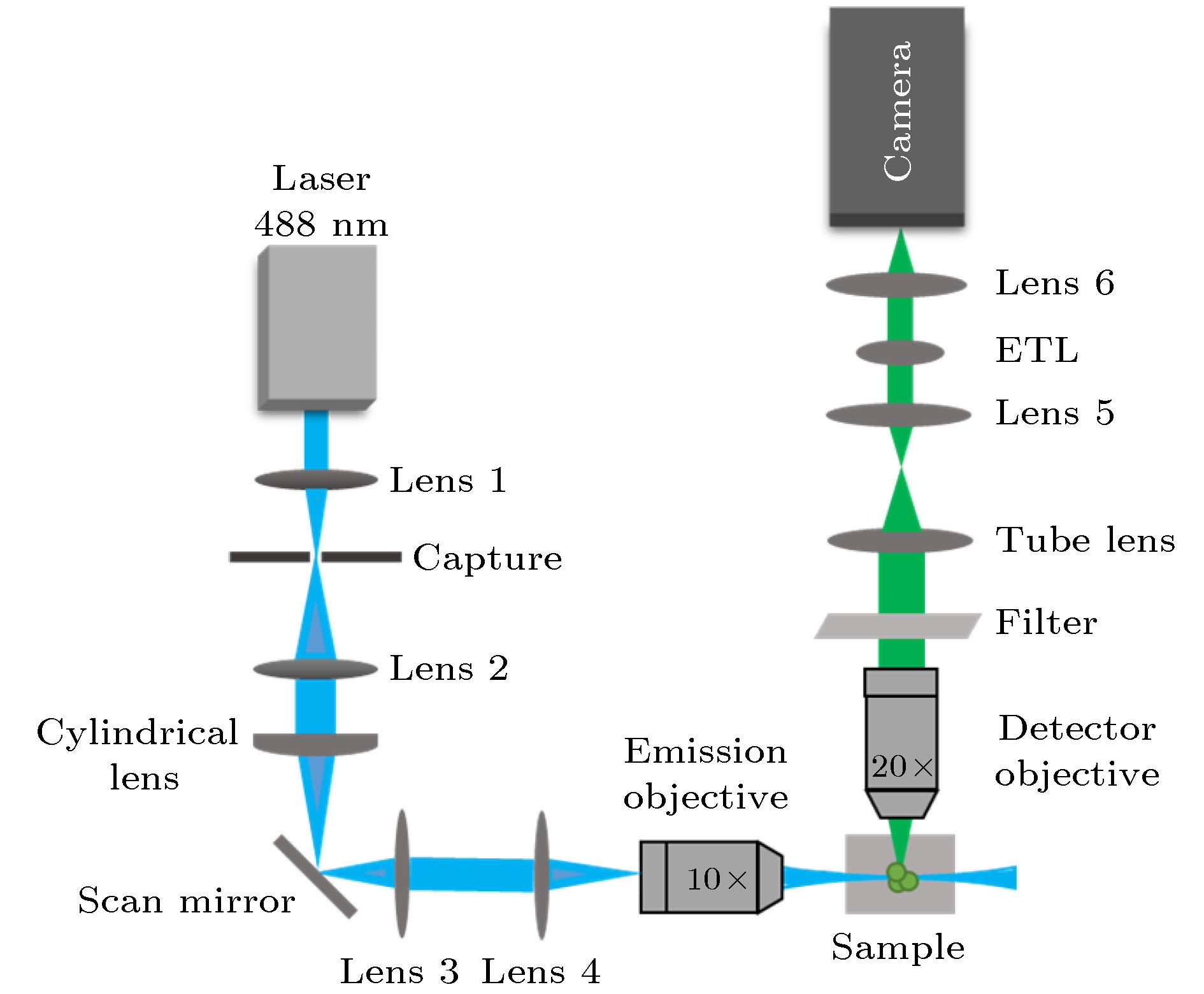
图 2 快速光片显微成像系统光路图
Fig. 2. Schematic diagram of rapid light-sheet fluorescence microscopy imaging system.
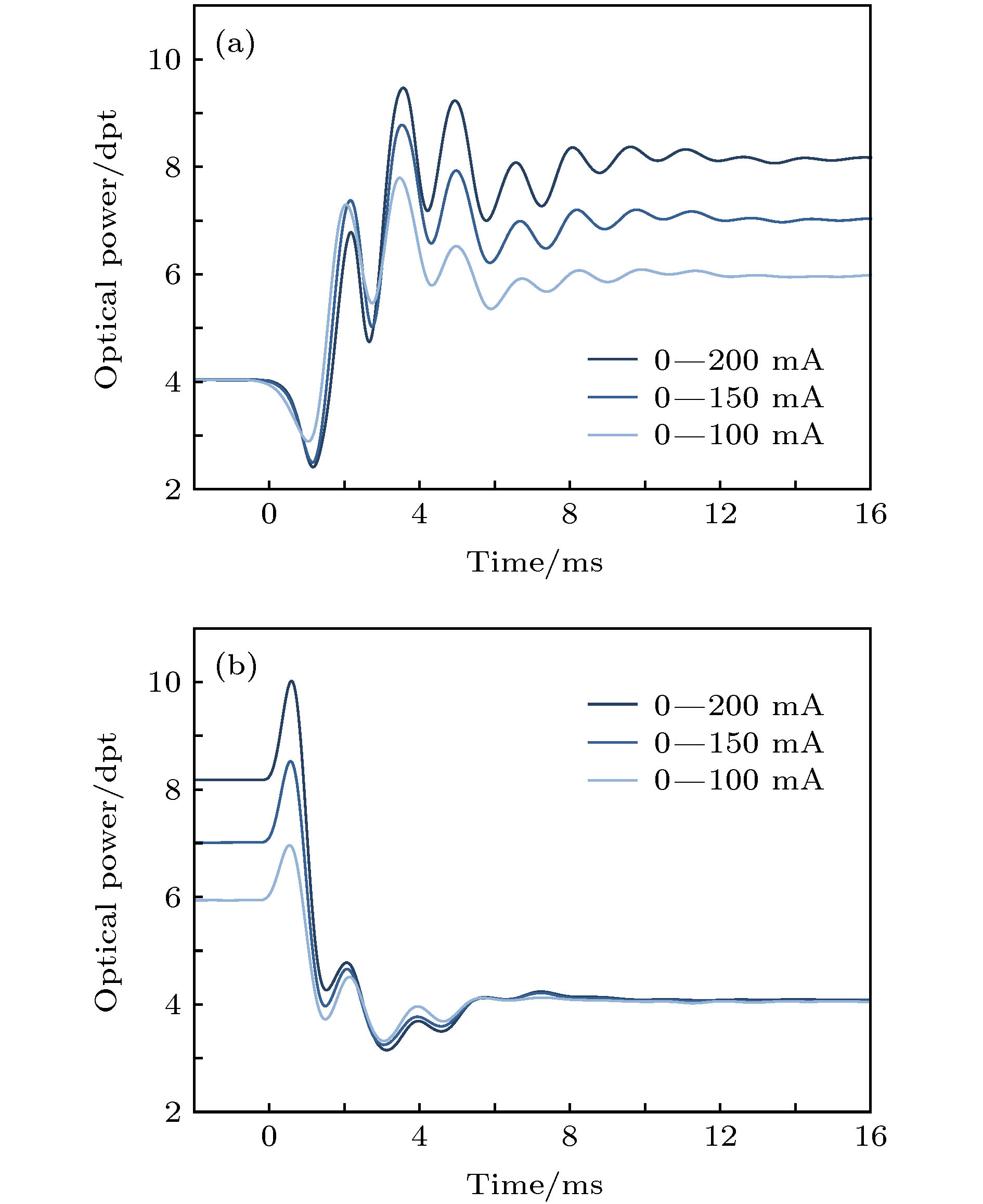
图 3 EL-10-30-C对电流阶跃的典型光学响应
Fig. 3. Typical optical response of the EL-10-30-Ci to a current step.
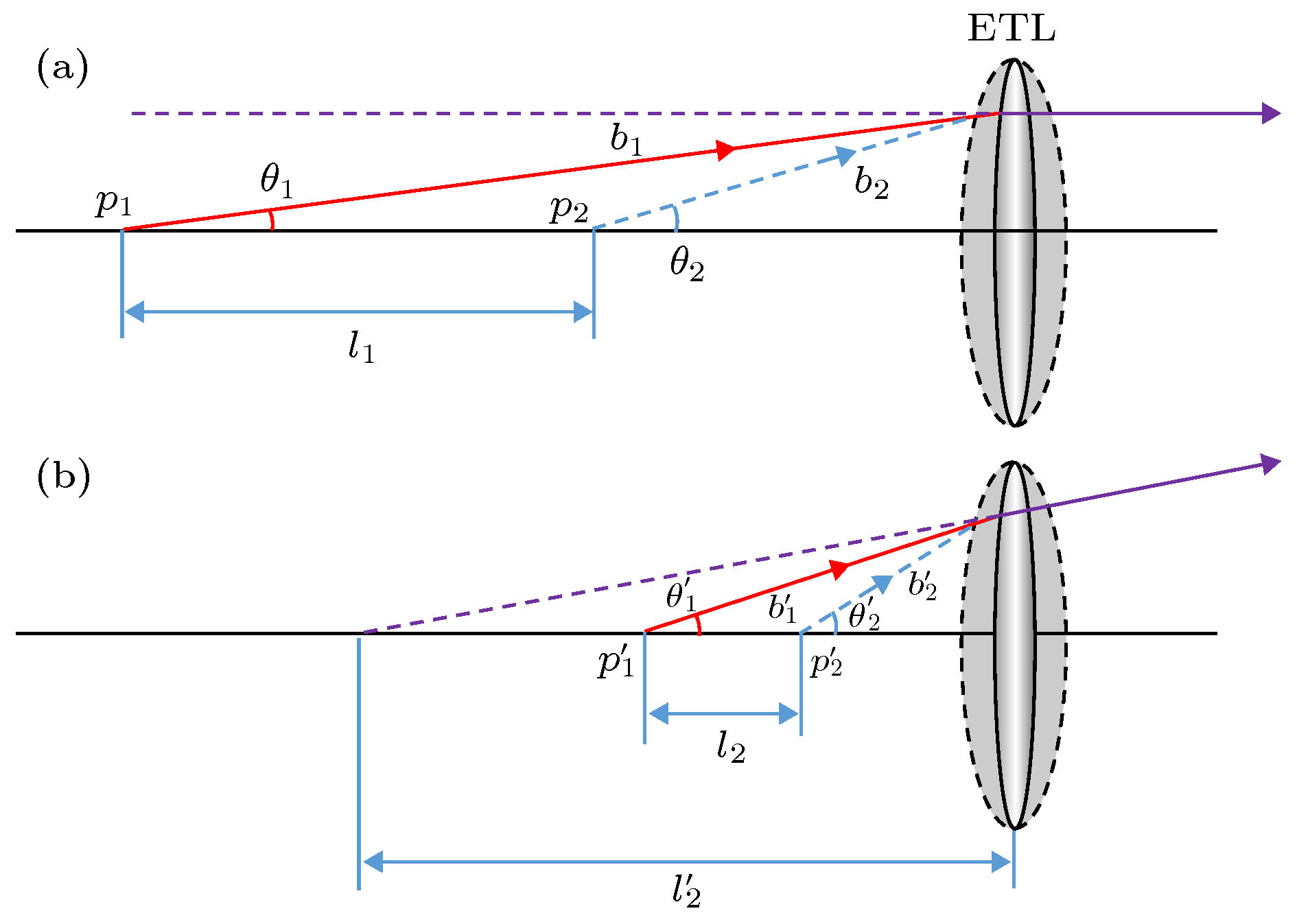
图 4 光束以不同孔径角透过ETL (a) 以小孔径角入射ETL; (b) 以大孔径角入射ETL
Fig. 4. The beam passing through the ETL at different aperture angles: (a) The beam passing through the ETL at small aperture angles; (b) the beam passing through the ETL at big aperture angles.
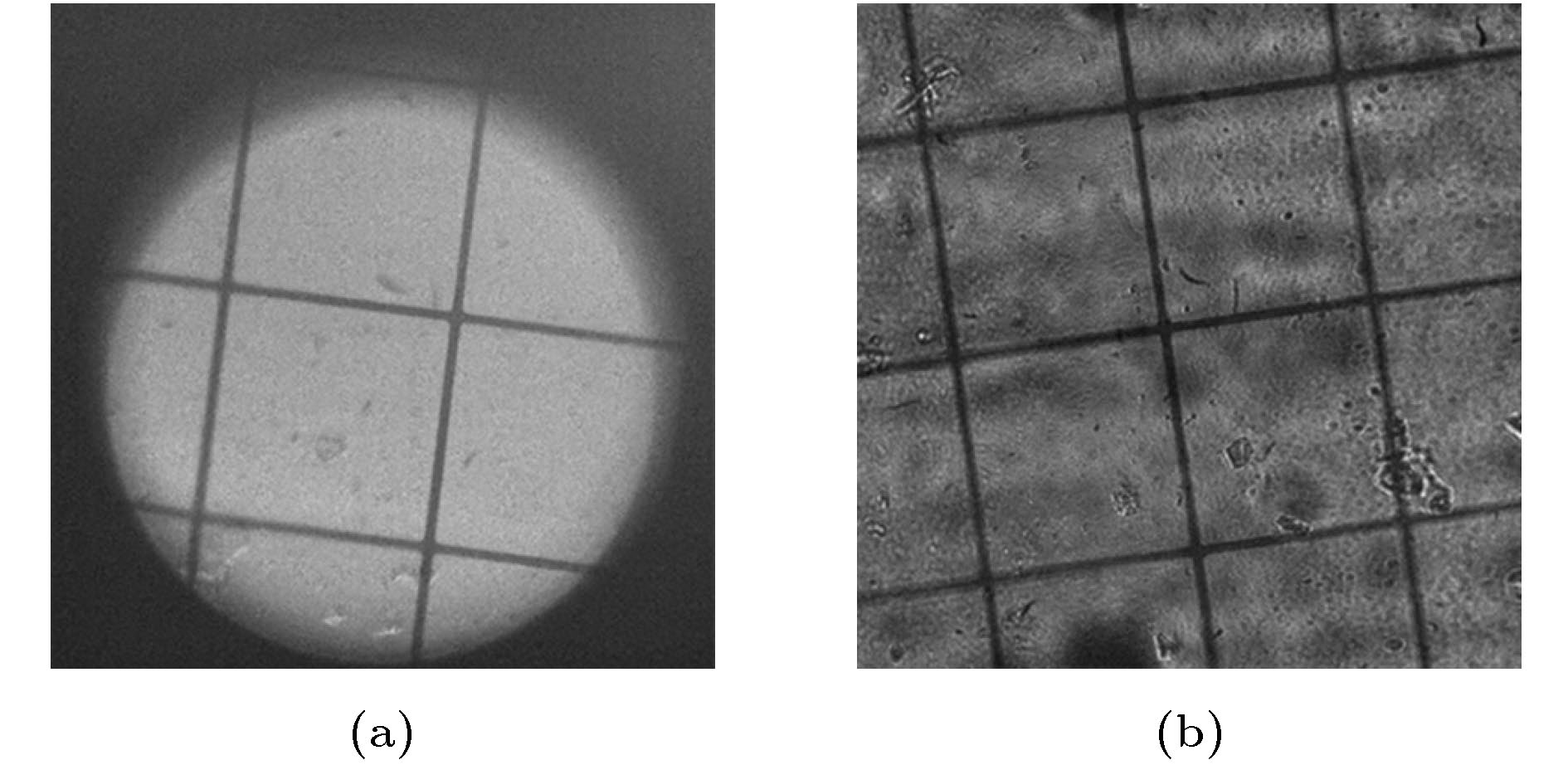
图 5 光束穿过ETL孔径 (a) ETL孔径阻挡光束; (b) ETL孔径未阻挡光束
Fig. 5. The beam passing through the ETL: (a) The beam is blocked by the aperture of ETL; (b) the beam is unblocked by the aperture of ETL.
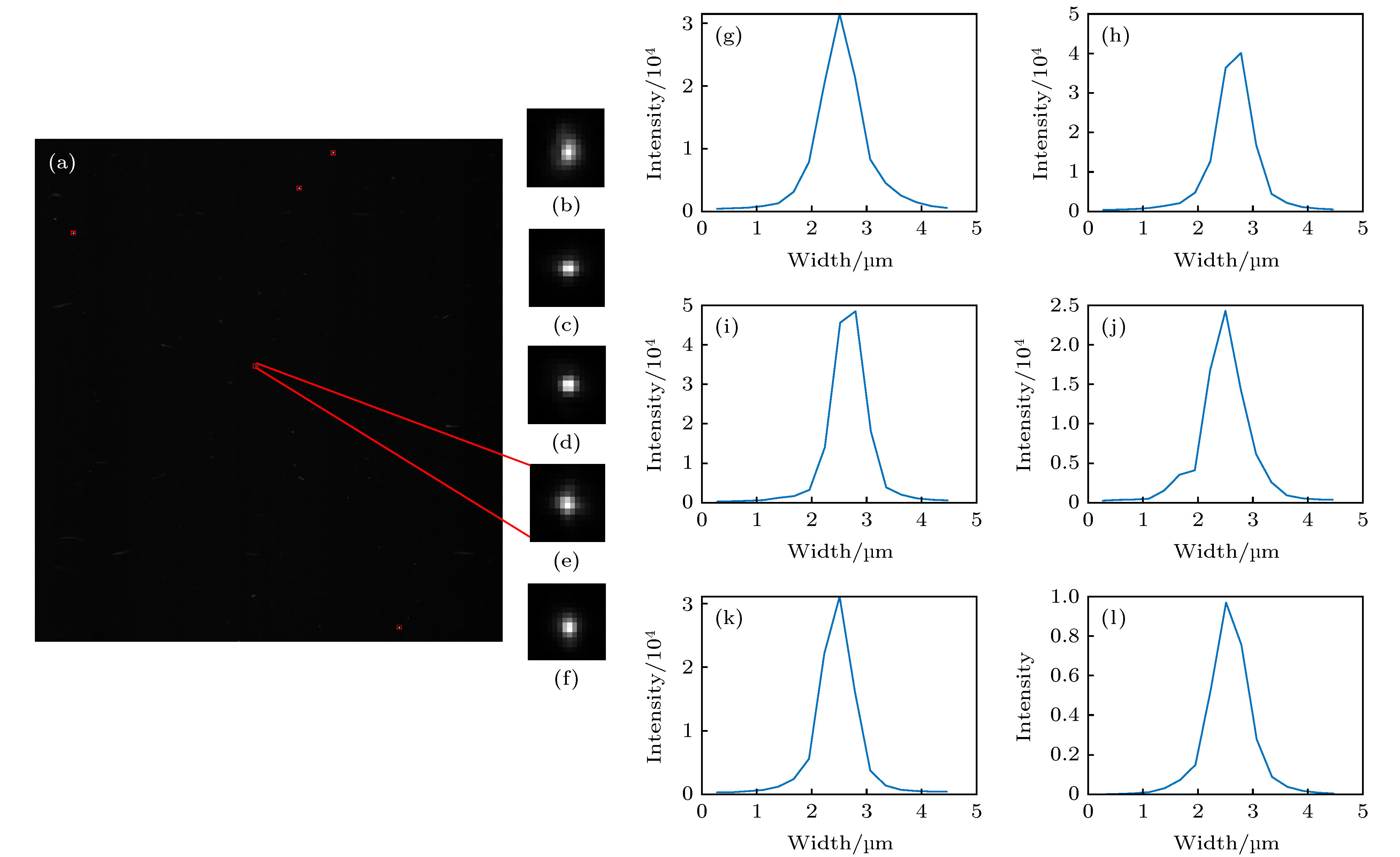
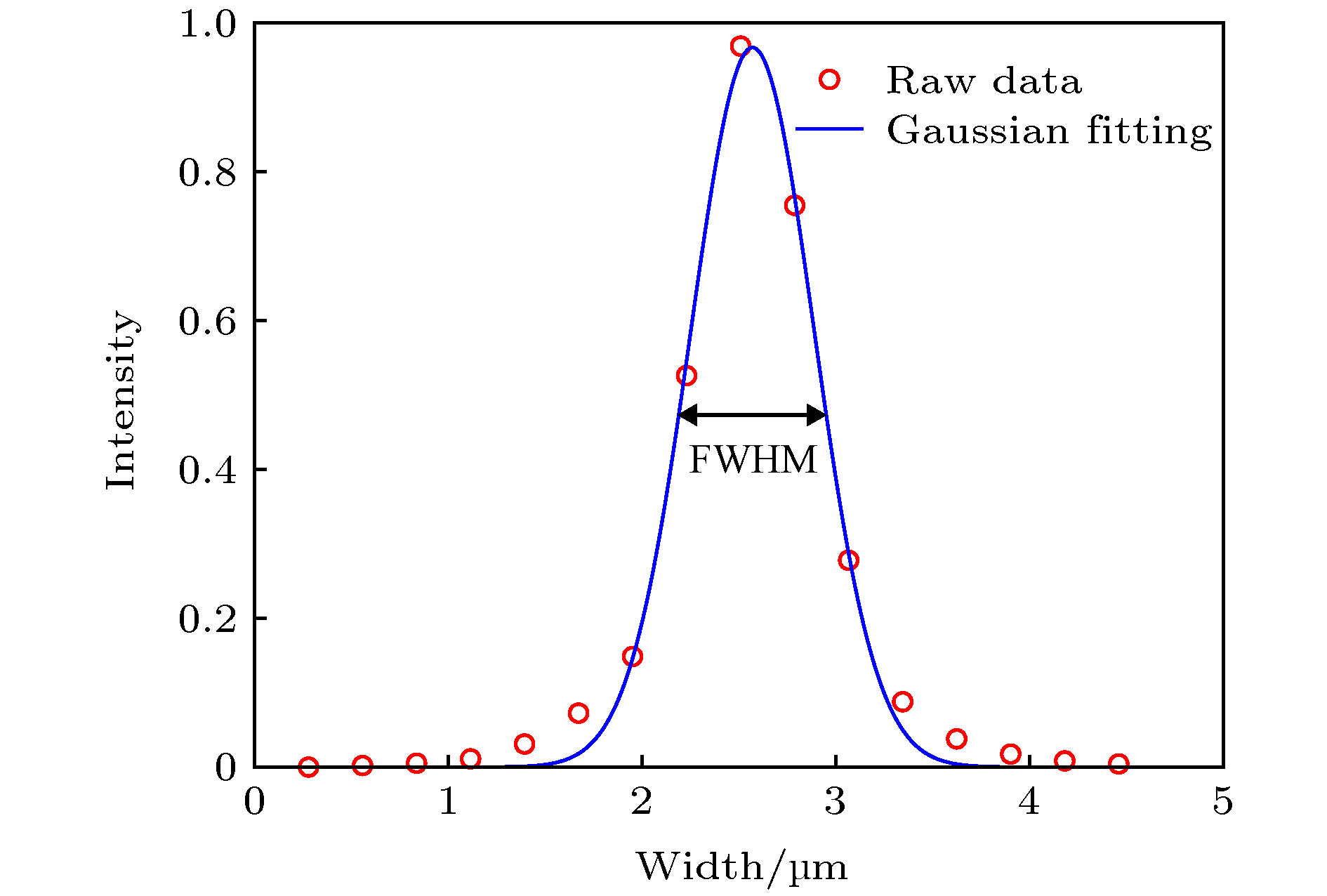
图 6 100 nm荧光微球的分析 (a) 100 nm荧光微球的拍摄图像; (b)−(f) 5个光强最大的荧光小球; (g)−(k) 分别是(b)−(f)中荧光小球的灰度剖面线; (l) (g)−(k)的归一化并平均化之后的曲线
Fig. 6. Analysis of 100 nm fluorescent spheres: (a) Image of 100 nm fluorescent spheres; (b)−(f) five fluorescent spheres with the largest intensity; (g)−(k) intensity profile of a horizontal line passing through the center of fluorescent sphere in (b)−(f); (l) the normalized and averaged curves of (g)−(k).
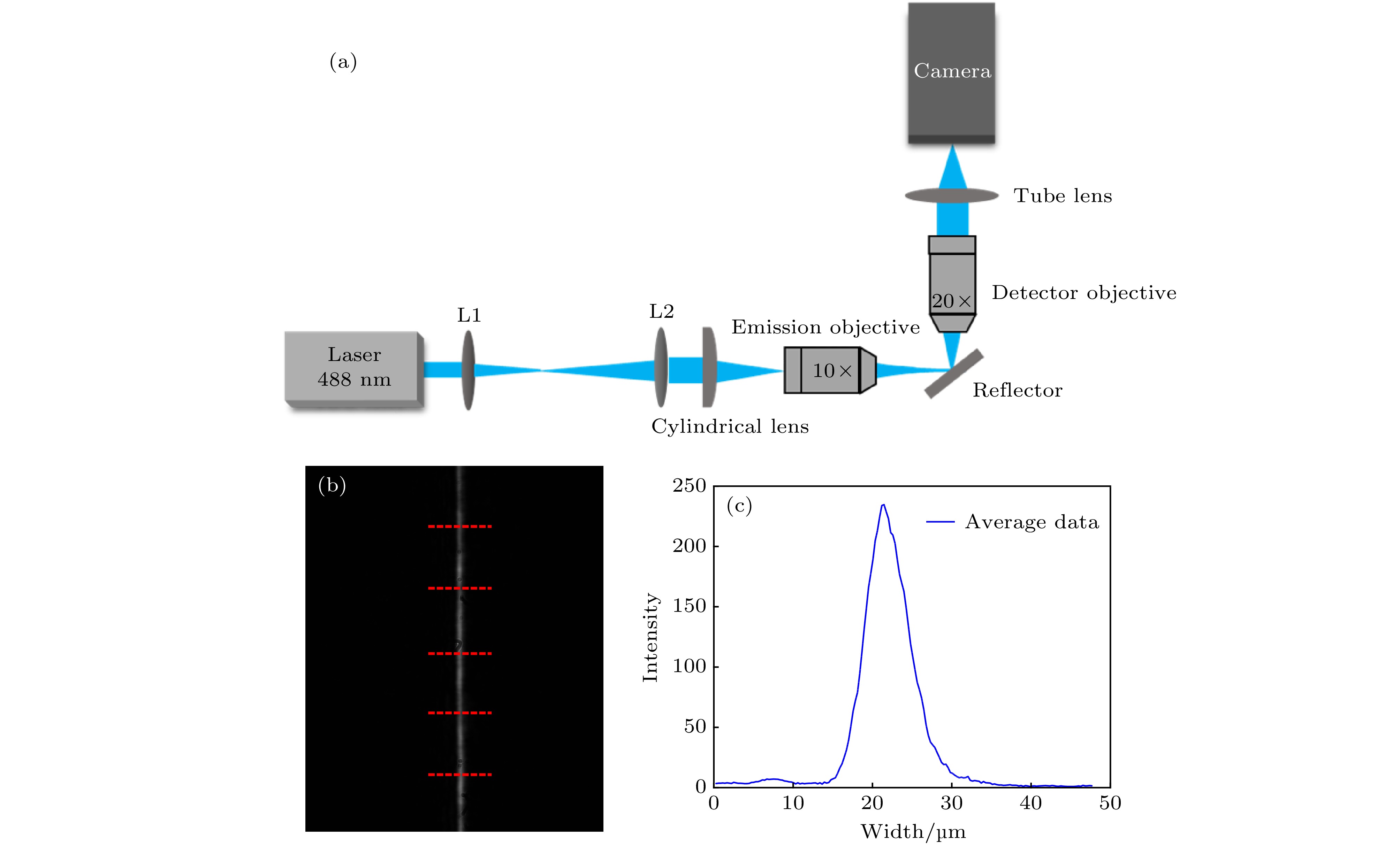
图 8 光片不同横截面的荧光光强分布 (a) 记录光片轮廓的光路; (b) 光片轮廓图; (c) 灰度剖面线平均化后的曲线
Fig. 8. Fluorescence intensity distribution at different profile of the light sheet: (a) Optical path for recording light sheet; (b) profile of light sheet; (c) average curves of intensity profile of light sheet.

图 9 同一个荧光小球在光片不同位置时的图像
Fig. 9. Image of the same fluorescent sphere at different positions of the light sheet.
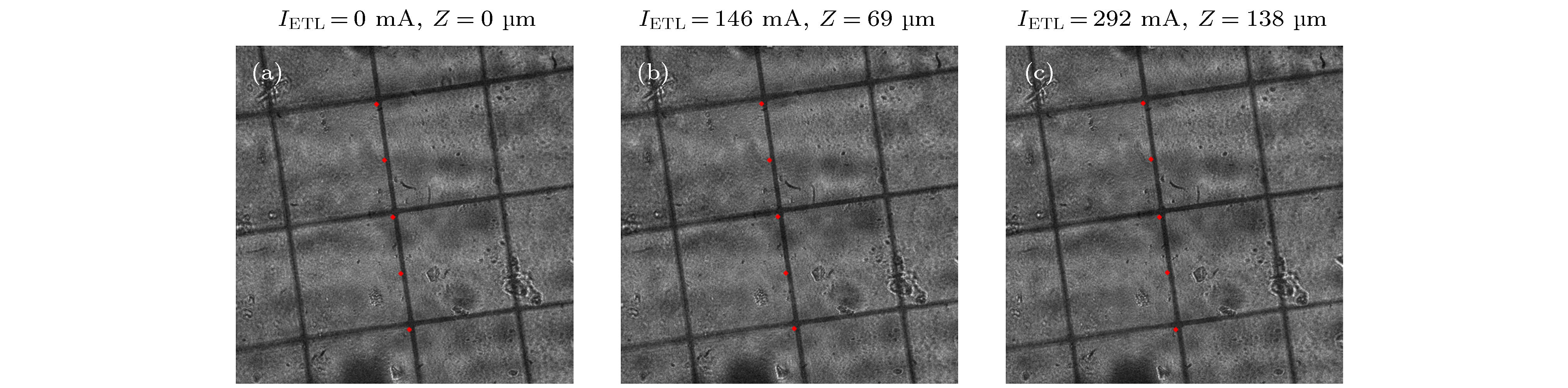
图 10 在ETL的范围内对200 μm网格成像 (a) IETL = 0 mA时的图像; (b) IETL = 146 mA时的图像; (c) IETL = 292 mA时的图像
Fig. 10. Images of a 200 μm grid over the ETL scan range: (a) Image when IETL = 0 mA; (b) image when IETL = 146 mA; (c) image when IETL = 292 mA.
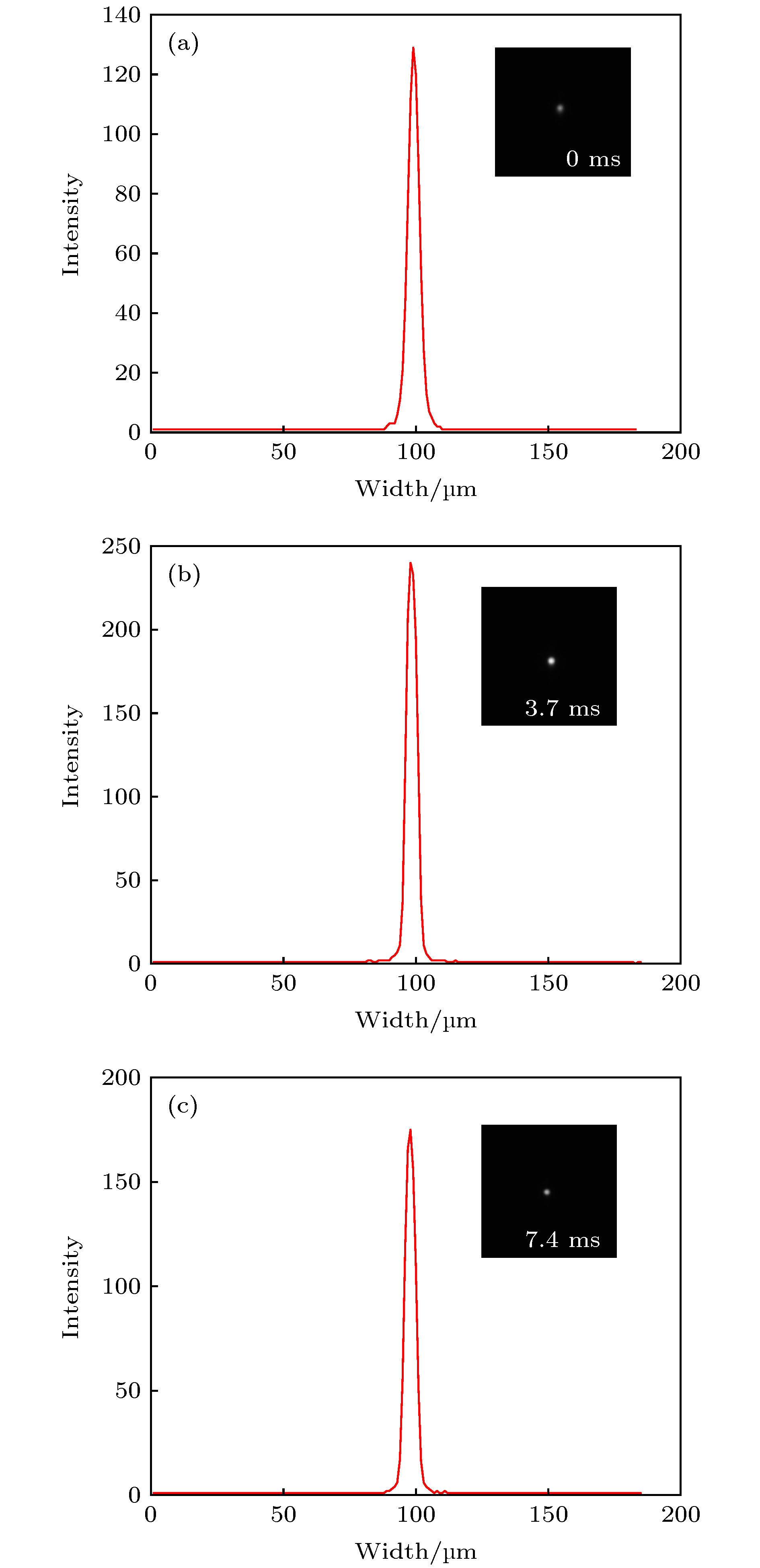
图 11 本实验结果的伪像分析 (a) 0 ms时经过荧光小球中心的灰度剖面线; (b) 3.7 ms时经过荧光小球中心的灰度剖面线; (c) 7.4 ms时经过荧光小球中心的灰度剖面线
Fig. 11. The artifacts analysis of the experimental results: (a) Intensity profile of a line passing through the center of fluorescent sphere captured at 0 ms; (b) intensity profile of a line passing through the center of fluorescent sphere captured at 3.7 ms; (c) intensity profile of a line passing through the center of fluorescent sphere captured at 7.4 ms.
-
[1] Zhang M X, Zhang J, Wang J, Achimovich A M, Aziz A A, Corbitt J, Acton S T, Gahlmann A 2019 Biophys. J. 116 25a
[2] Rocha M D, During D N, Bethge P, Voigt F F, Hildebrand S, Helmchen F, Pfeifer A, Hahnloser R H R, Gahr M 2019 Front. Neuroanat. 13 13
Google Scholar
[3] Ahrens M B, Orger M B, Robson D N, Li J M, Keller P J 2013 Nat. Methods 10 413
Google Scholar
[4] Huisken J, Swoger J, Del Bene F, Wittbrodt J, Stelzer E H 2004 Science 305 1007
Google Scholar
[5] Huisken J, Stainier D Y R 2009 Development 136 1963
Google Scholar
[6] Rasmi C K, Madhangi M, Nongthomba U, Mondal P P 2016 Microsc. Res. Techniq. 79 455
Google Scholar
[7] Wu Y C, Ghitani A, Christensen R, Santella A, Du Z, Rondeau G, Bao Z R, Colon-Ramos D, Shroff H 2011 Proc. Natl. Acad. Sci. U.S.A. 108 17708
Google Scholar
[8] Lemon W C, Pulver S R, Hockendorf B, McDole K, Branson K, Freeman J, Keller P J 2015 Nat. Commun. 6 7924
Google Scholar
[9] Kumar S, Wilding D, Sikkel M B, Lyon A R, MacLeod K T, Dunsby C 2011 Opt. Express 19 13839
Google Scholar
[10] Wu D, Zhou X, Yao B L, Li R Z, Yang Y L, Peng T, Lei M, Dan D, Ye T 2015 Appl. Opt. 54 8632
Google Scholar
[11] Ma P, Chan D C, Gu S, Watanabe M, Jenkins M W, Rollins A M 2016 Biomed. Opt. Express 7 5120
Google Scholar
[12] 安坤, 王晶, 梁东, 刘军 2017 中国激光 44 274
An K, Wang J, Liang D, Liu J 2017 Chin. J. Lasers 44 274
[13] Hedde P N, Gratton E 2018 Microsc. Res. Techniq. 81 924
Google Scholar
[14] Fei P, Lee J, Packard R R S, Sereti K I, Xu H, Ma J G, Ding Y C, Kang H, Chen H, Sung K, Kulkarni R, Ardehali R, Kuo C C J, Xu X L, Ho C M, Hsiai T K 2016 Sci. Rep. 6 22489
Google Scholar
[15] Haslehurst P, Yang Z Y, Dholakia K, Emptage N 2018 Biomed. Opt. Express 9 2154
Google Scholar
[16] Kashekodi A B, Meinert T, Michiels R, Rohrbach A 2018 Biomed. Opt. Express 9 4263
Google Scholar
[17] Fahrbach F O, Voigt F F, Schmid B, Helmchen F, Huisken J 2013 Opt. Express 21 21010
Google Scholar
[18] Landry J R, Itoh R, Li J M, Hamann S S, Mandella M, Contag C H, Solgaard O 2019 J. Biomed. Opt. 24 4
[19] Guan Z, Lee J, Jiang H, Dong S Y, Jen N, Hsiai T, Ho C M, Fei P 2016 Biomed. Opt. Express 7 194
Google Scholar
[20] Ritter J G, Veith R, Siebrasse J P, Kubitscheck U 2008 Opt. Express 16 7142
Google Scholar
[21] Engelbrecht C J, Stelzer E H 2006 Opt. Lett. 31 1477
Google Scholar
[22] 张球, 梁东, 白丽华, 刘军 2019 中国激光 46 279
Zhang Q, Liang D, Bai L H, Liu J 2019 Chin. J. Lasers 46 279


 下载:
下载:
计量
- 文章访问数: 14852
- PDF下载量: 170
- 被引次数: 0
