










-
为解决一类典型工程摆的工作性能参数优选, 抽象该类系统为“受垂直激励和水平约束”的物理单摆模型. 运用多尺度法解析系统的亚谐共振响应, 明确了系统参数对幅值共振带宽、多值性的作用规律. 利用Melnikov函数法, 求解得到系统的同宿轨和Smale意义上混沌的阈值条件. 通过数值法解析系统单参分岔、最大Lyapunov指数、双参分岔及吸引域流形转迁等动力特性, 揭示了这类摆系统的亚谐共振分岔、周期吸引子倍增、周期与混沌吸引子共存等全局特性的运动规律, 进一步明确了相关参数改变对系统运动形态转化、能量分布与演变规律的作用机理, 得到了相关参数对工程系统工作性能的影响和作用机制. 研究结果对工程中该类典型物理系统的工作性能参数调整, 及其对实际工况中系统的减振抑振提供了理论依据.In order to improve the working performance and optimize the working parameters of the typical engineering pendulum of a typical system that it is abstracted as a physical simple pendulum model with vertical excitation and horizontal constraint. The dynamical equation of the system with vertical excitation and horizontal constraint is established by using Lagrange equation. The multiple-scale method is used to analyze the subharmonic response characteristics of the system. The amplitude-frequency response equation and the phase-frequency response equation are obtained through calculation. The effects of the system parameters on the amplitude resonance bandwidth and variability are clarified. According to the singularity theory and the universal unfolding theory, the bifurcation topology structure of the subharmonic resonance of the system is obtained. The Melnikov function is applied to the study of the critical conditions for the chaotic motion of the system. The parameter equation of homoclinic orbit motion is obtained through calculation. The threshold conditions of chaos in the sense of Smale are analyzed by solving the Melnikov function of the homoclinic motion orbit. The dynamic characteristics of the system, including single-parameter bifurcation, maximum Lyapunov exponent, bi-parameter bifurcation, and manifold transition in the attraction basin, are analyzed numerically. The results show that the main path of the system entering into the chaos is an almost period doubling bifurcation. Complex dynamical behaviors such as periodic motion, period doubling bifurcation and chaos are found. The bi-parameter matching areas of the subharmonic resonance bifurcation and chaos of the system are clarified. The results reveal the global characteristics of the system with vertical excitation and horizontal constraint, such as subharmonic resonance bifurcation, periodic attractor multiplication, and the coexistence of periodic and chaotic attractors. The results further clarify the mechanism of the influence of system parameters change on the movement form transformation, energy distribution and evolution law of the system. The mechanism of the influence of relevant parameters on the performance of the engineering system with vertical excitation and horizontal constraint is also obtained. The results of this research provide theoretical bases for adjusting the parameters of working performances of this typical physical system in engineering domain and the vibration reduction and suppression of the system in actual working conditions.
-
Keywords:
- simple pendulum /
- subharmonic resonance /
- bifurcation /
- chaos
[1] Wu Q X, Wang X K, Lin H, Xia M H 2020 Mech. Syst. Signal Process. 144 106968
 Google Scholar
Google Scholar
[2] Ouyang H M, Tian Z, Yu L L, Zhang G M 2020 J. Frankl. Inst. 357 8299
Google Scholar
[3] Lin B T, Zhang Q W, Fan F, Shen S Z 2020 Appl. Math. Model. 87 606
Google Scholar
[4] Wu S T 2009 J. Sound Vib. 323 1
Google Scholar
[5] 王观, 胡华, 伍康, 李刚, 王力军 2016 物理学报 65 200702
Google Scholar
Wang G, Hu H, Wu K, Li G, Wang L J 2016 Acta Phys. Sin. 65 200702
Google Scholar
[6] Matthews M R 1989 Res. Sci. Educ. 19 187
Google Scholar
[7] Czolczynski K, Perlikowski P, Stefanski A, Kapitaniak T 2009 Physica A 388 5013
Google Scholar
[8] Szumiński W, Woźniak D 2020 Commun. Nonlinear Sci. Numer. Simulat. 83 105099
Google Scholar
[9] Náprstek J, Fischer C 2013 Comput. Struct. 124 74
Google Scholar
[10] Han N, Cao Q J 2017 Int. J. Mech. Sci. 127 91
Google Scholar
[11] Amer T S, Bek M A, Abohamer M K 2019 Mech. Res. Commun. 95 23
Google Scholar
[12] 方潘, 侯勇俊, 张丽萍, 杜明俊, 张梦媛 2016 物理学报 65 014501
Google Scholar
Fang P, Hou Y J, Zhang L P, Du M J, Zhang M Y 2016 Acta Phys. Sin. 65 014501
Google Scholar
[13] Kapitaniak M, Perlikowski P, Kapitaniak T 2013 Commun. Nonlinear Sci. Numer. Simulat. 18 2088
Google Scholar
[14] 萧寒, 唐驾时, 梁翠香 2009 物理学报 58 2989
Google Scholar
Xiao H, Tang J S, Liang C X 2009 Acta Phys. Sin. 58 2989
Google Scholar
[15] 张利娟, 张华彪, 李欣业 2018 物理学报 67 244302
Google Scholar
Zhang L J, Zhang H B, Li X Y 2018 Acta Phys. Sin. 67 244302
Google Scholar
[16] Bek M A, Amer T S, Sirwah M A, Awrejcewicz J, Arab A A 2020 Results Phys. 19 103465
Google Scholar
[17] Butikov E I 2015 Commun. Nonlinear Sci. Numer. Simulat. 20 298
Google Scholar
[18] Zhou L Q, Liu S S, Chen F Q 2017 Chaos Solit. Fract. 99 270
Google Scholar
[19] Franco E, Astolfi A, Baena F R 2018 Mech. Mach. Theory 130 539
Google Scholar
[20] Najdecka A, Kapitaniak T, Wiercigroch M 2015 Int. J. Non-Linear Mech. 70 84
Google Scholar
[21] Stefanski A, Pikunov D, Balcerzak M, Dabrowski A 2020 Int. J. Mech. Sci. 173 105454
Google Scholar
[22] Wijata A, Polczyński K, Awrejcewicz J 2021 Mech. Syst. Signal Process. 150 107229
Google Scholar
[23] Kholostova O V 1995 J. Appl. Maths. Mechs. 59 553
Google Scholar
[24] Jallouli A, Kacem N, Bouhaddi N. 2017 Commun. Nonlinear Sci. Numer. Simulat. 42 1
Google Scholar
[25] Brzeski P, Perlikowski P, Yanchuk S, Kapitaniak T 2012 J. Sound Vib. 331 5347
Google Scholar
[26] Witz J A 1995 Ocean Eng. 22 411
Google Scholar
[27] Peláez J, Andrés Y N 2005 J. Guid. Control Dynam. 28 611
Google Scholar
[28] Li Y S, Yang M M, Sun H X, Liu Z M, Zhang Y 2018 J. Intell. Robot. Syst. 89 485
Google Scholar
[29] Zheng Y J, Shen G X, Li Y G, Li M, Liu H M 2014 J. Iron Steel Res. Int. 21 837
Google Scholar
[30] Kojima H, Fukatsu K, Trivailo P M 2015 Acta Astronaut. 106 24
Google Scholar
[31] Shen G X, Li M 2009 J. Mater. Process. Tech. 209 5002
Google Scholar
[32] Nayfeh A H 1983 J. Sound Vib. 88 1
Google Scholar
[33] Golubitsky M, Schaeffer D G 1985 Singularities and Groups in Bifurcation Theory (Vol. Ⅰ) (New York: Springer-Verlag) pp131−133
-

图 1 受垂直激励和水平约束的单摆模型
Fig. 1. Simple pendulum model with vertical excitation and horizontal constraint.
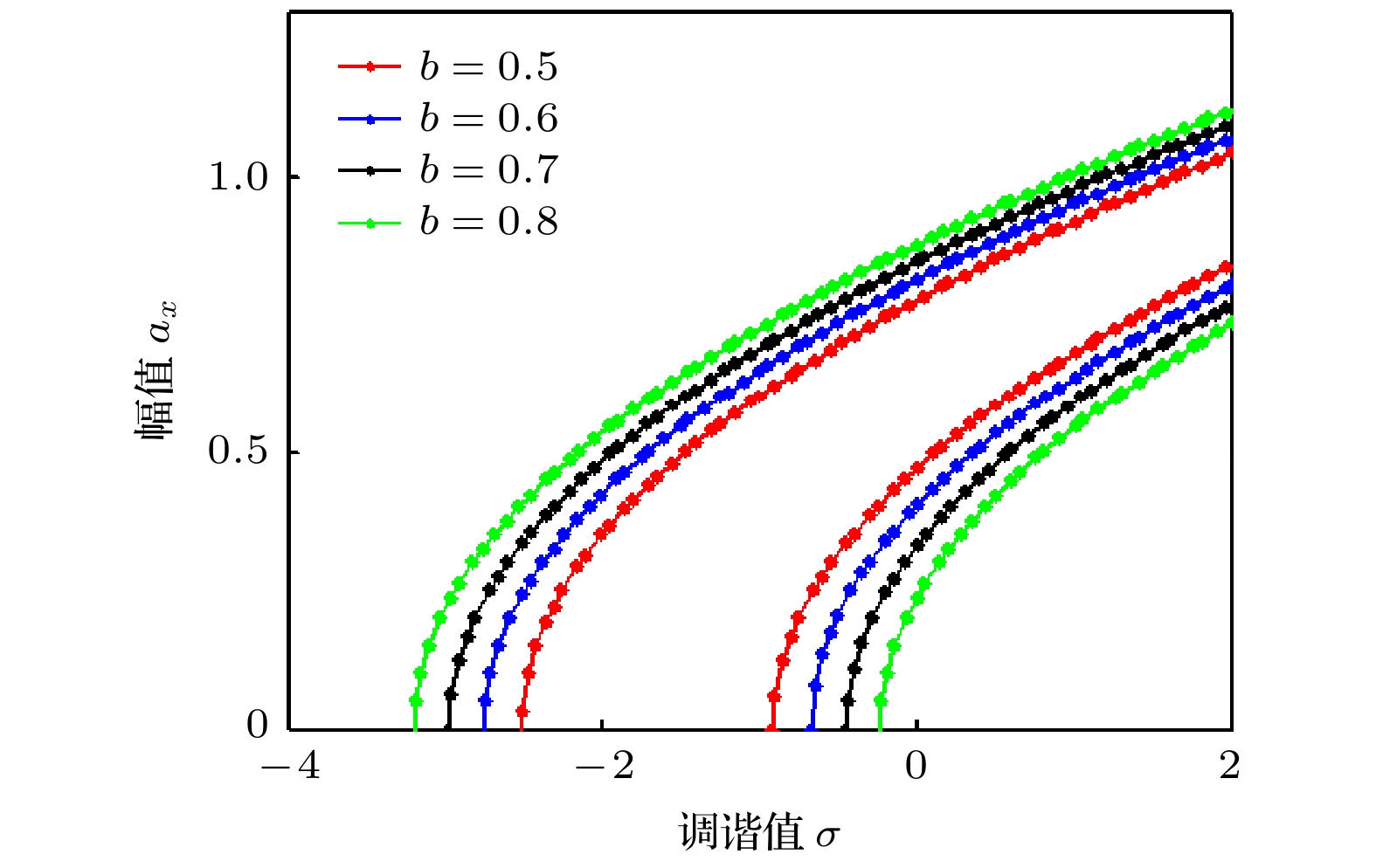
图 2 σ变化下改变b的幅频响应曲线
Fig. 2. Amplitude-frequency response curves with different σ and b.

图 3 σ变化下改变k33的幅频响应曲线
Fig. 3. Amplitude-frequency response curves with different σ and k33.
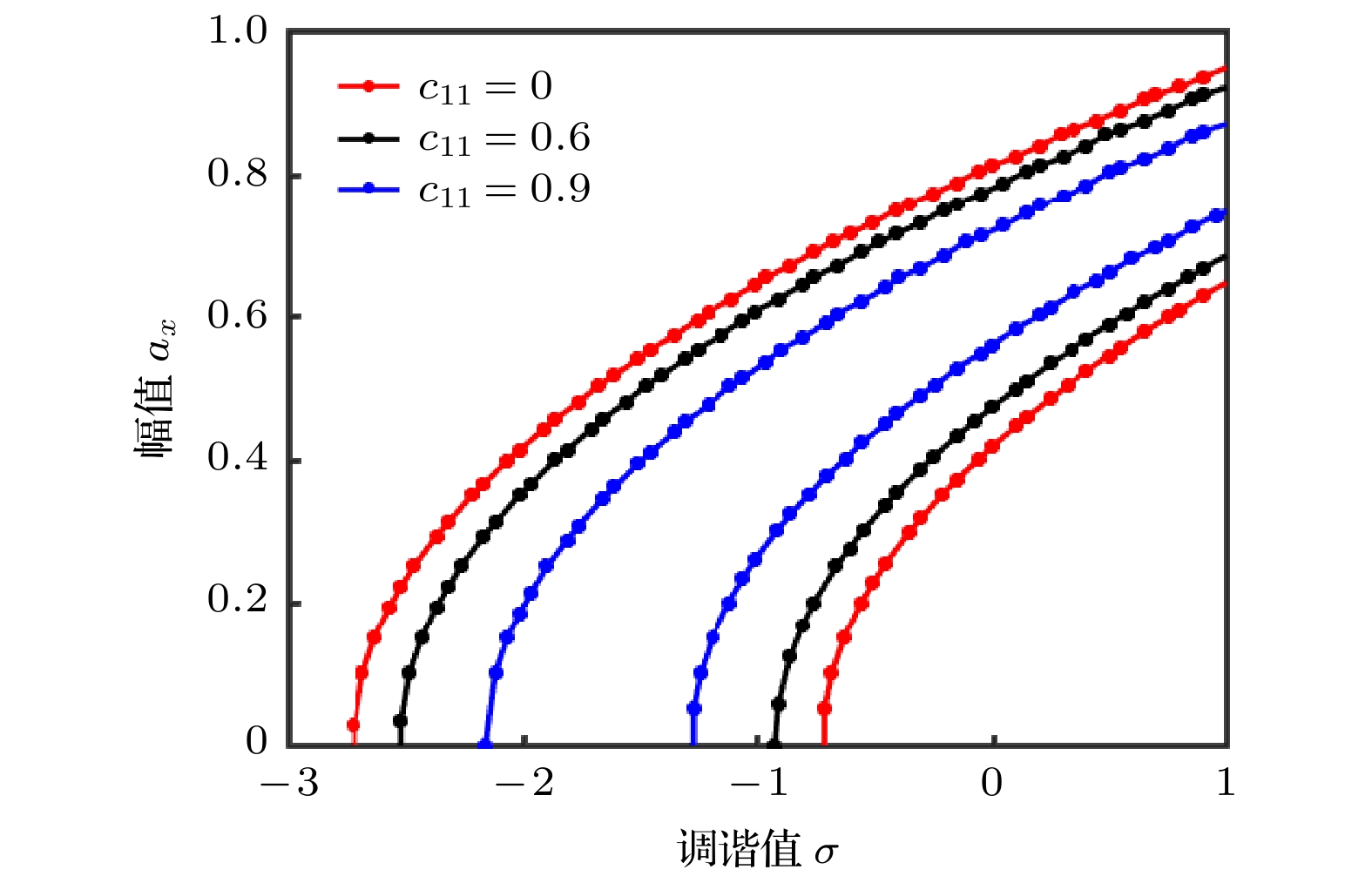
图 4 σ变化下改变c11的幅频响应曲线
Fig. 4. Amplitude-frequency response curves with different σ and c11.

图 5 c11变化下改变σ的幅频响应曲线
Fig. 5. Amplitude-frequency response curves with different c11 and σ.
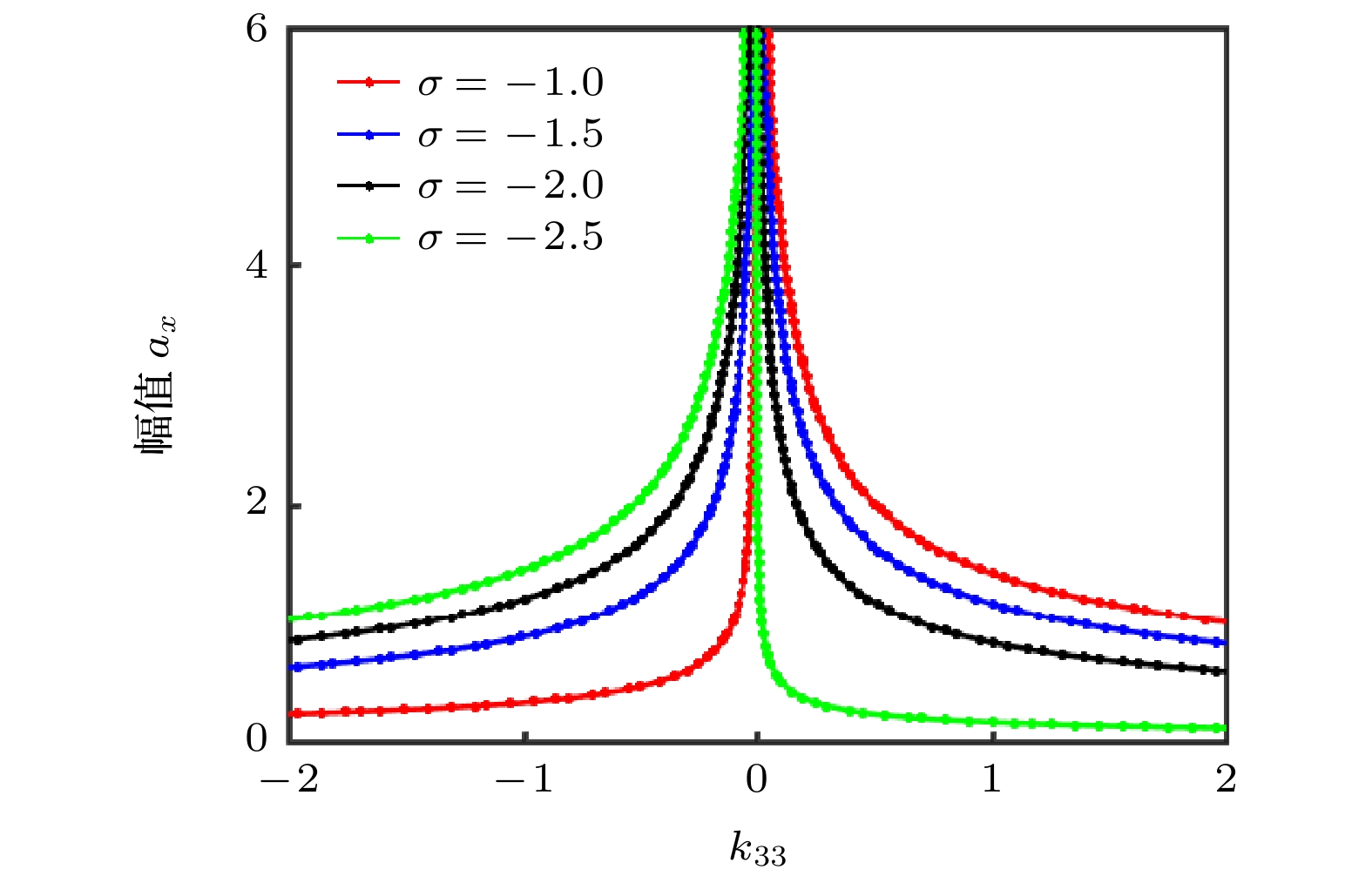
图 6 k33变化下改变σ的幅频响应曲线
Fig. 6. Amplitude-frequency response curves with different k33 and σ.
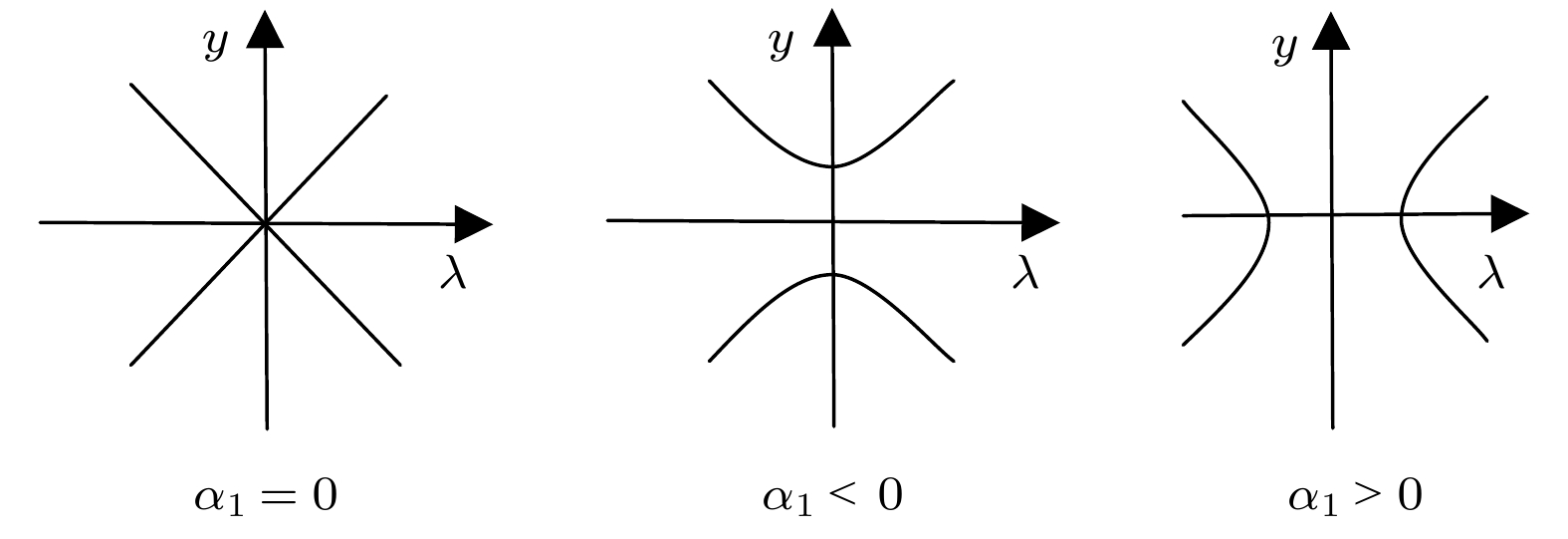
图 7 受垂直激励和水平约束单摆系统1/2次亚谐共振分岔拓扑结构
Fig. 7. Bifurcation topology of 1/2-order subharmonic resonance of a simple pendulum system with vertical excitation and horizontal constraint.
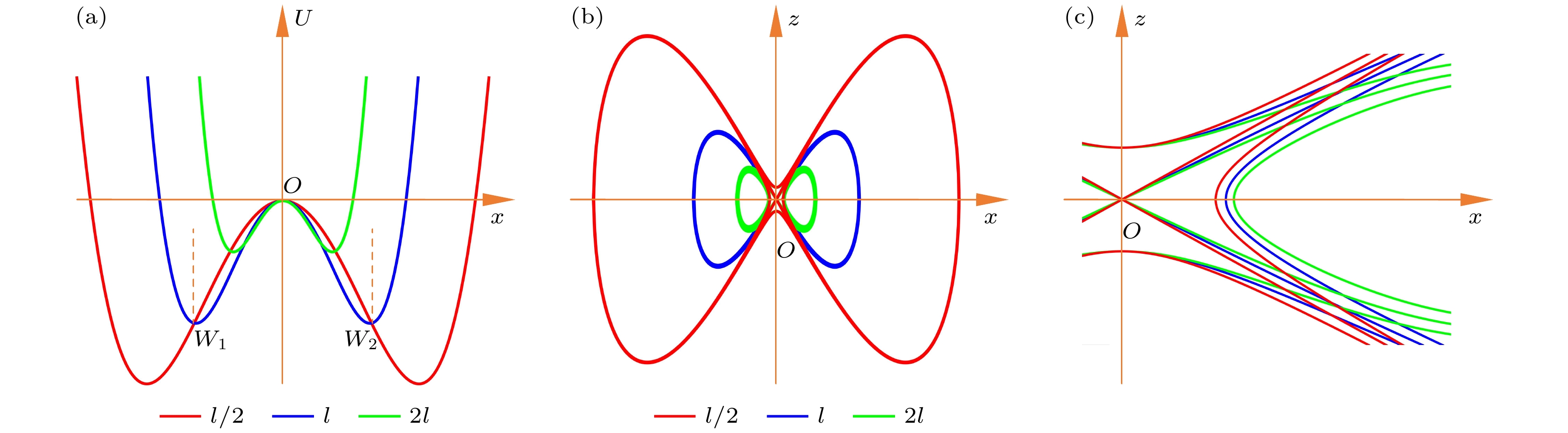
图 8 (a)势阱曲线; (b), (c)相轨线及其局部放大图
Fig. 8. (a) Potential well curve; (b), (c) phase track and its enlarged view.

图 10 单摆系统亚谐共振在ωb = 2时的混沌吸引子
Fig. 10. Chaotic attractor of simple pendulum system when ωb = 2.

图 12 ωb变化下的(a)分岔和(b)最大Lyapunov指数
Fig. 12. (a) Bifurcation and (b) maximum Lyapunov exponent with different ωb.
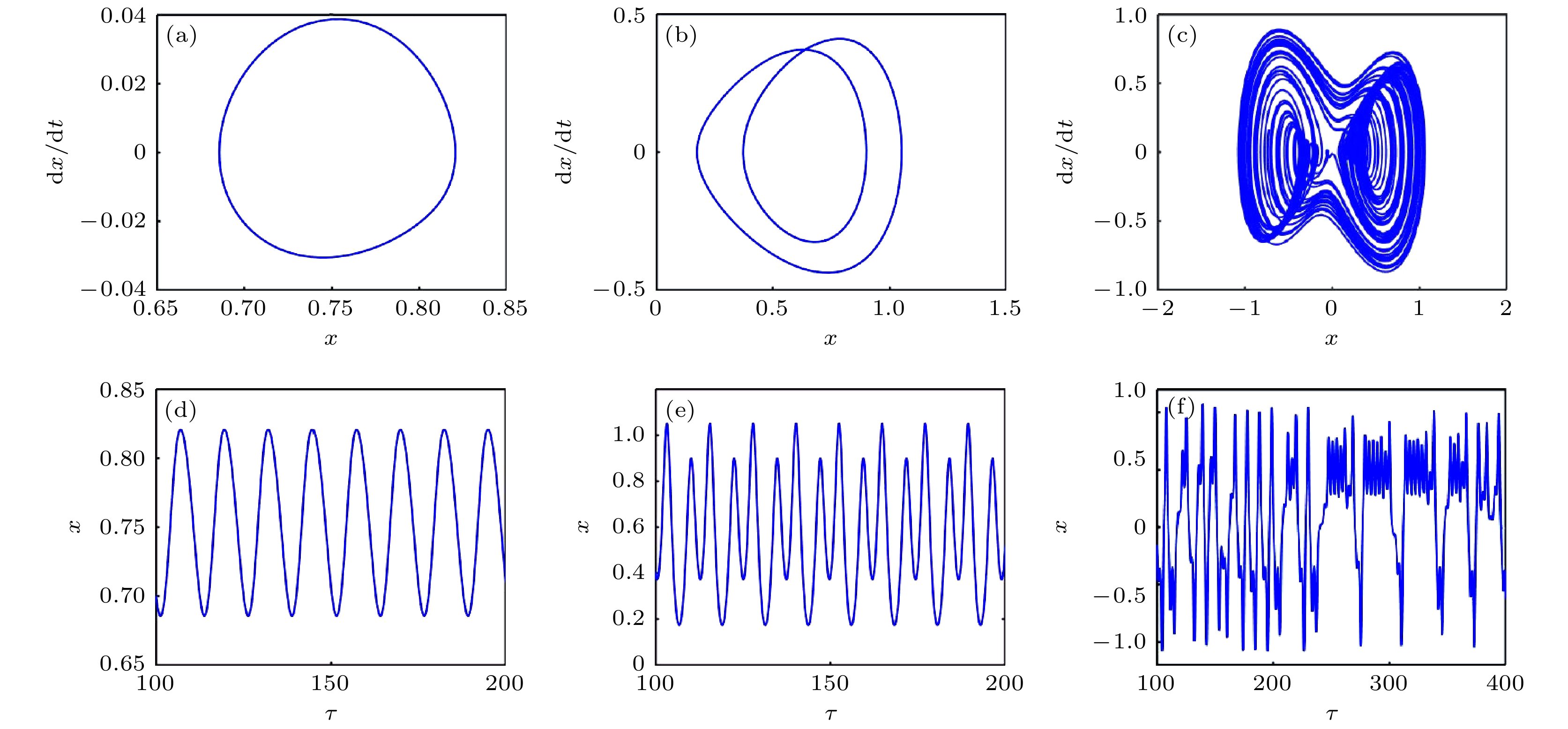
图 13 ωb变化下的(a)−(c)相图和(d)−(f)时间历程图 (a), (d) ωb = 0.5; (b), (e) ωb = 1.02; (c), (f) ωb = 1.8
Fig. 13. (a)−(c) Phase diagram and (d)−(f) time history diagram with different ωb : (a), (d) ωb = 0.5; (b), (e) ωb = 1.02; (c), (f) ωb = 1.8
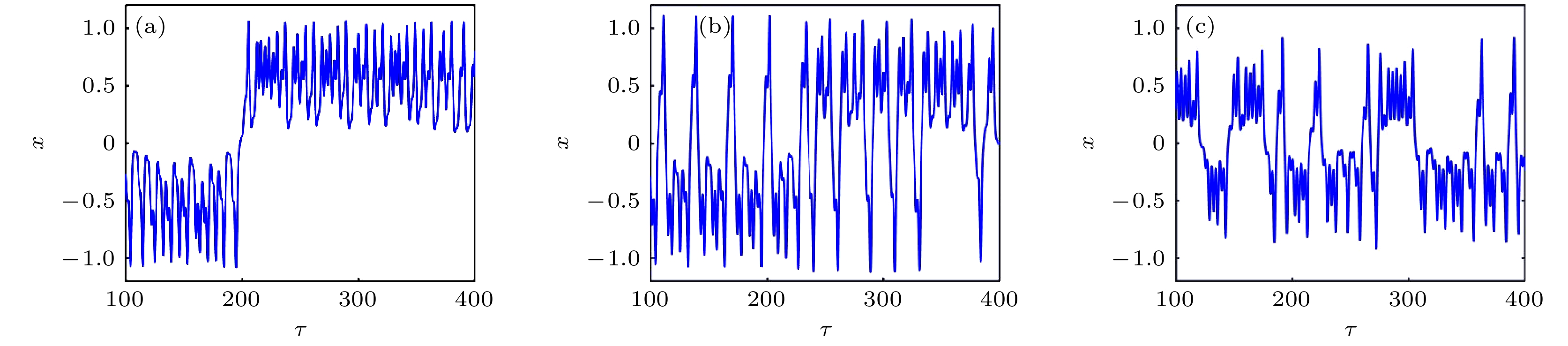
图 14 当ωb = 1.8时b变化下的时间历程图 (a) b = 0.28; (b) b = 0.38; (c) b = 0.58
Fig. 14. Time history diagram when b changes and ωb = 1.8: (a) b = 0.28; (b) b = 0.38; (c) b = 0.58.

图 15 c11变化下的(a)分岔和(b)最大Lyapunov指数
Fig. 15. (a) Bifurcation and (b) maximum Lyapunov exponent with different c11.

图 16 c11变化下的(a)−(c)相图和(d)−(f)时间历程图 (a), (d) c11 = 0.6; (b), (e) c11 = 0.63; (c), (f) c11 = 1.2
Fig. 16. (a)−(c) Phase diagram and (d)−(f) time history diagram with different c11: (a), (d) c11 = 0.6; (b), (e) c11 = 0.63; (c), (f) c11 = 1.2.

图 17 g1变化下的(a)分岔和(b)最大Lyapunov指数
Fig. 17. (a) Bifurcation and (b) maximum Lyapunov exponent with different g1.
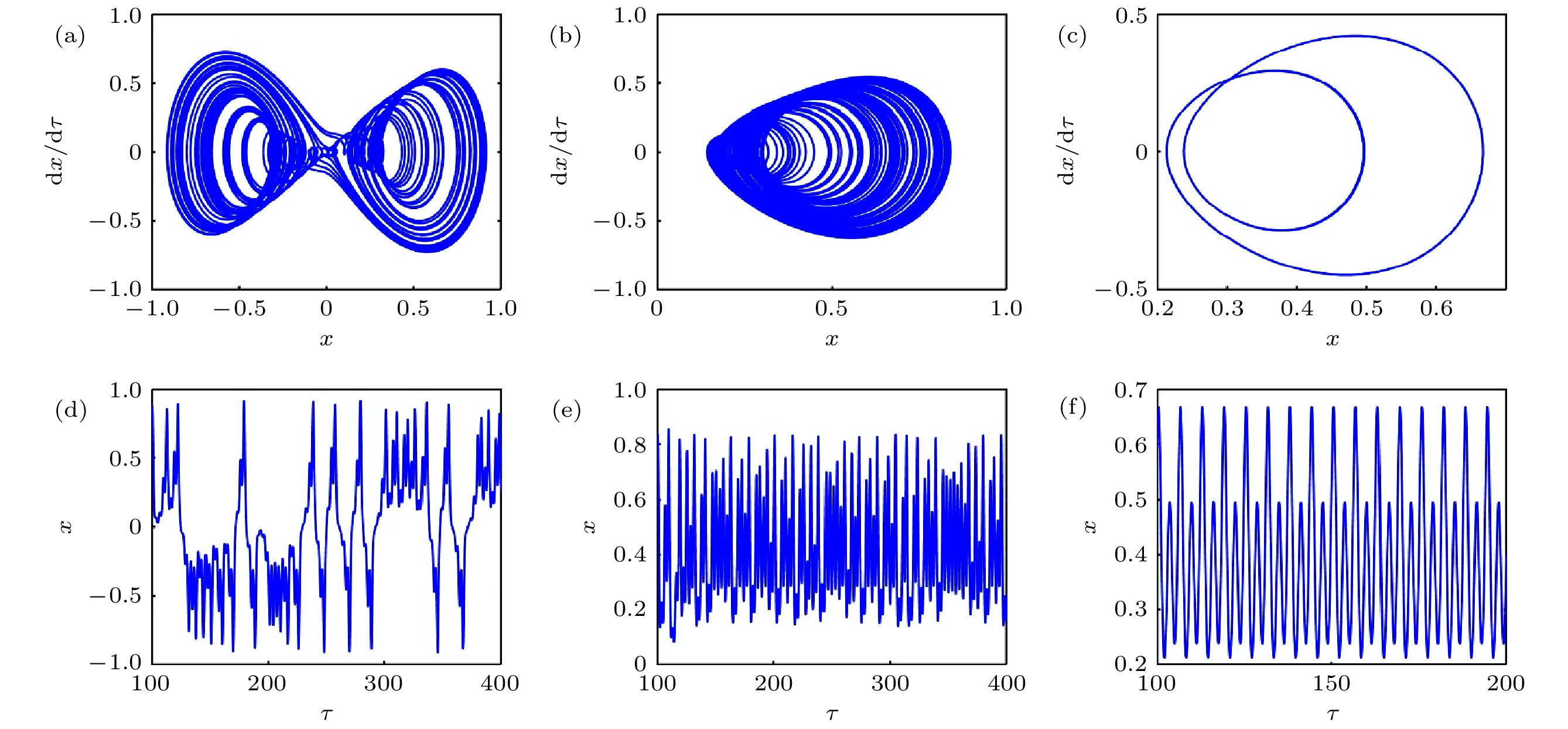
图 18 g1变化下的(a)−(c)相图和(d)−(f)时间历程图 (a), (d) g1 = 0.27; (b), (e) g1 = 0.28; (c), (f) g1 = 0.36
Fig. 18. (a)−(c) Phase diagram and (d)−(f) time history diagram with different g1: (a), (d) g1 = 0.27; (b), (e) g1 = 0.28; (c), (f) g1 = 0.36.

图 19 k33变化下的(a)分岔和(b)最大Lyapunov指数
Fig. 19. (a) Bifurcation and (b) maximum Lyapunov exponent with different k33..
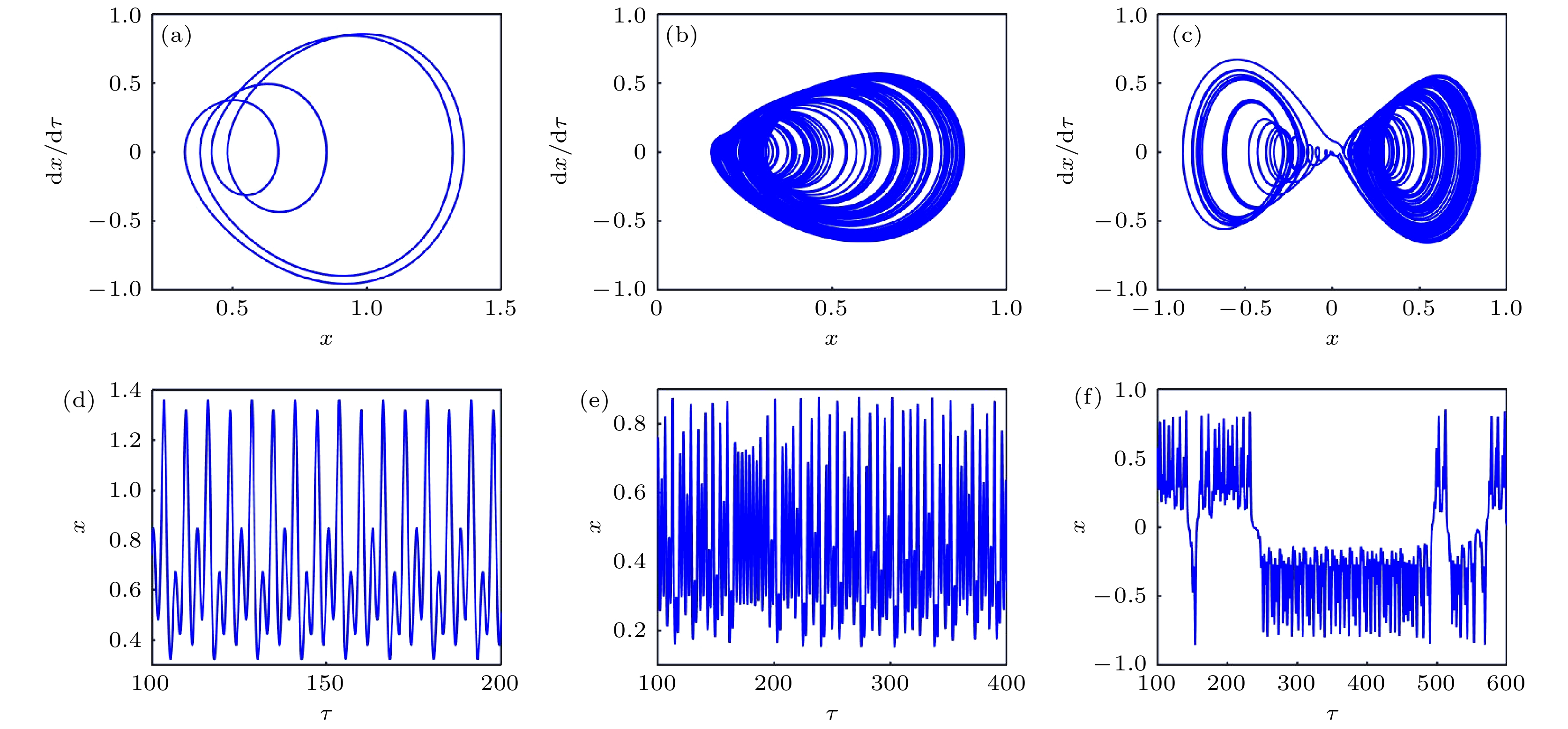
图 20 k33变化下的(a)−(c)相图和(d)−(f)时间历程图 (a), (d) k33 = 0.6; (b), (e) k33 = 1.2; (c), (f) k33 = 1.4
Fig. 20. (a)−(c) Phase diagram and (d)−(f) time history diagram with different k33: (a), (d) k33 = 0.6; (b), (e) k33 = 1.2; (c), (f) k33 = 1.4
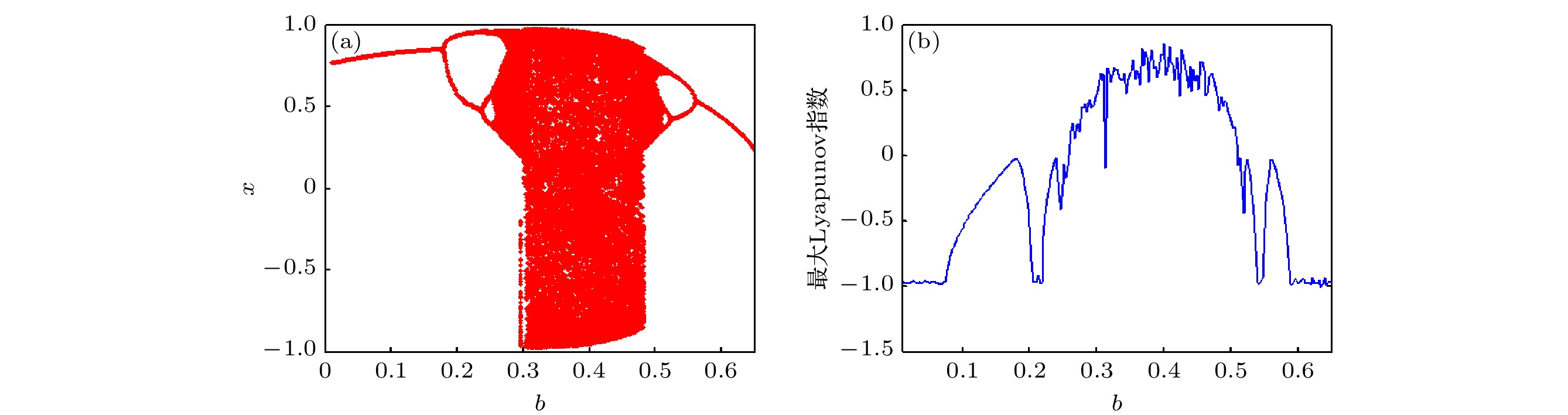
图 21 b变化下的(a)分岔和(b)最大Lyapunov指数
Fig. 21. (a) Bifurcation and (b) maximum Lyapunov exponent with different b.
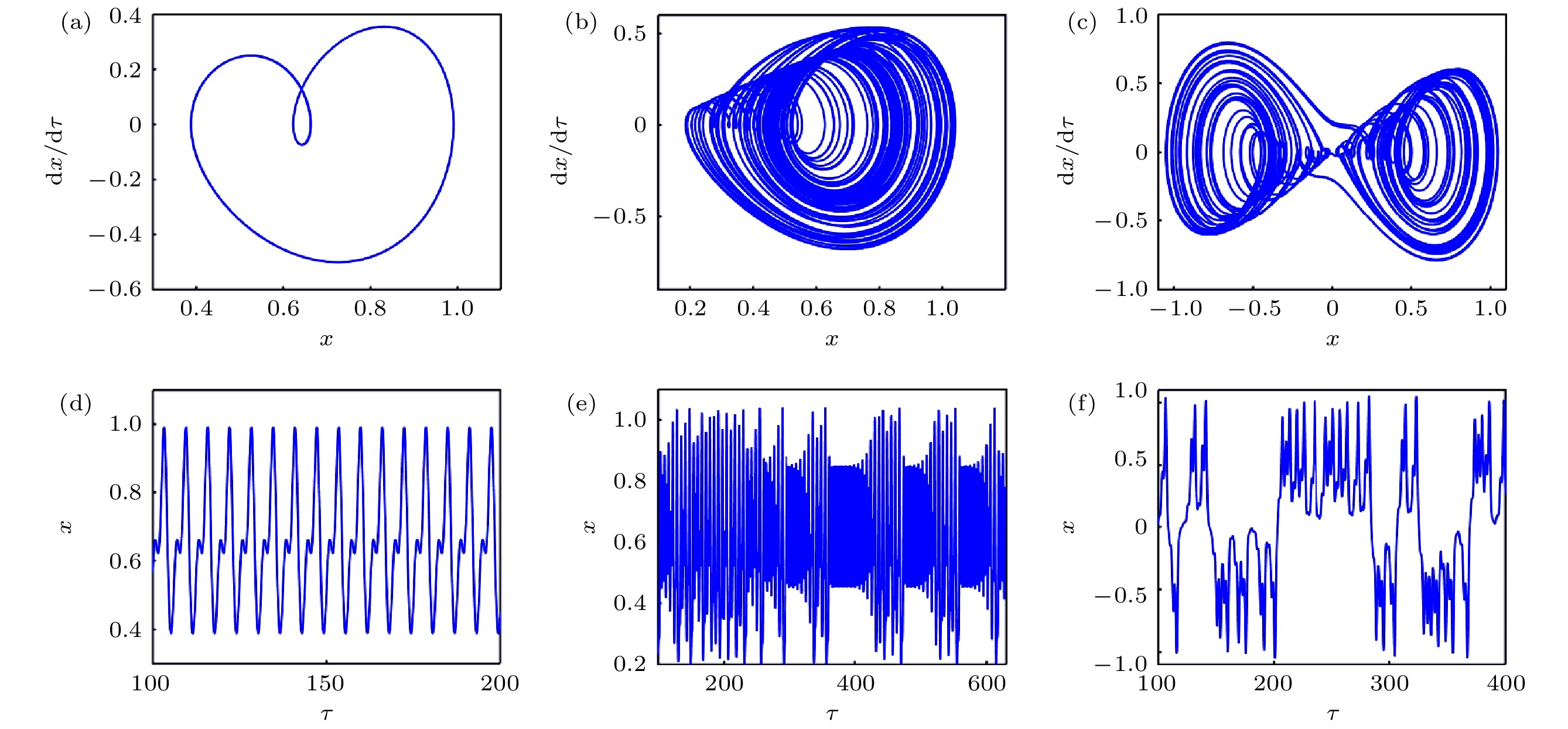
图 22 b变化下的(a)−(c)相图和(d)−(f)时间历程图 (a), (d) b = 0.19; (b), (e) b = 0.28; (c), (f) b = 0.36
Fig. 22. (a)−(c) Phase diagram and (d)−(f) time history diagram with different b: (a), (d) b = 0.19; (b), (e) b = 0.28; (c), (f) b = 0.36

图 23 当b = 0.36时ωb变化下的时间历程图 (a) ωb = 1.3 (b) ωb = 1.5; (c) ωb = 1.7
Fig. 23. Time history diagram when ωb changes and b = 0.36: (a) ωb = 1.3; (b) ωb = 1.5; (c) ωb = 1.7.
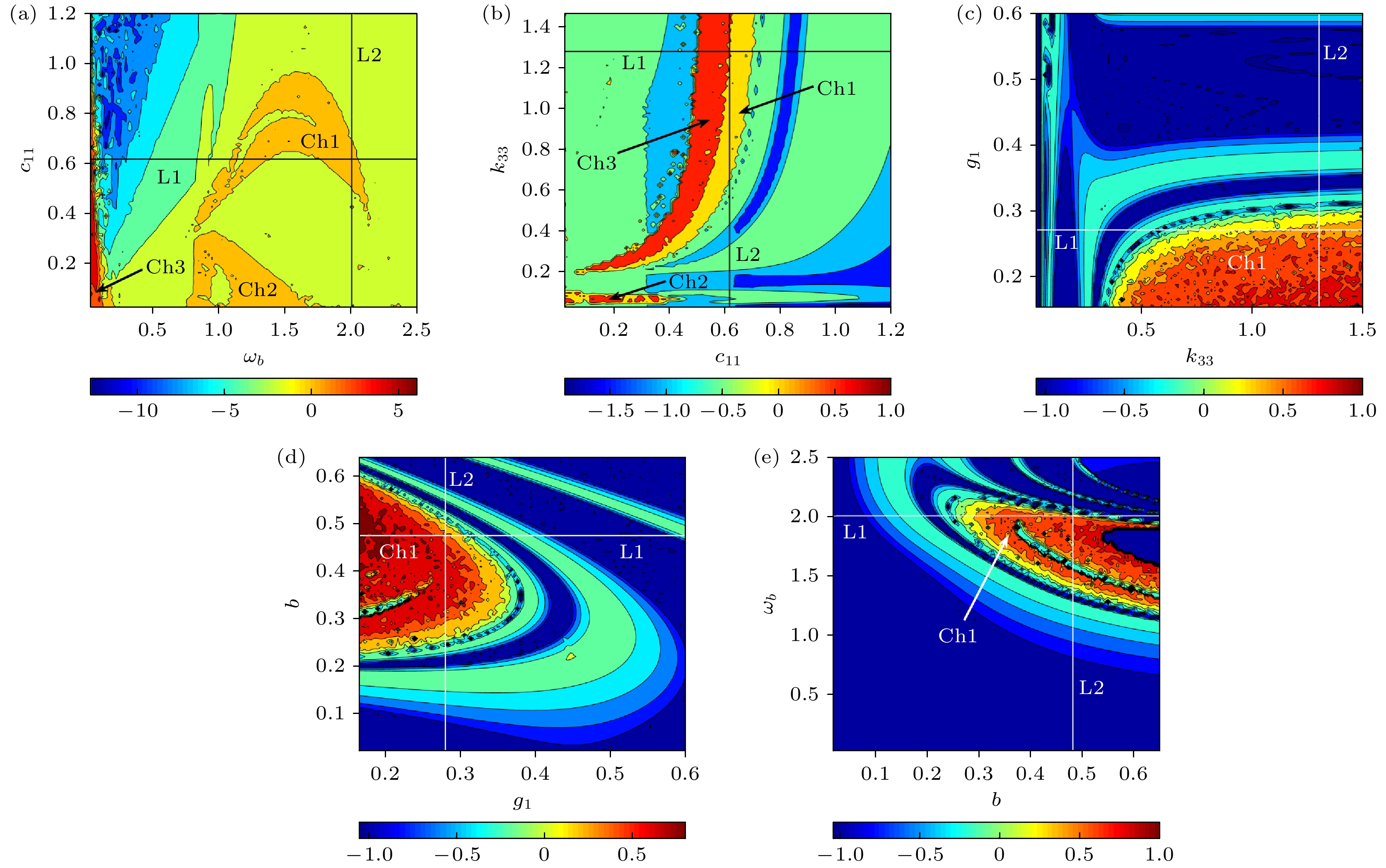
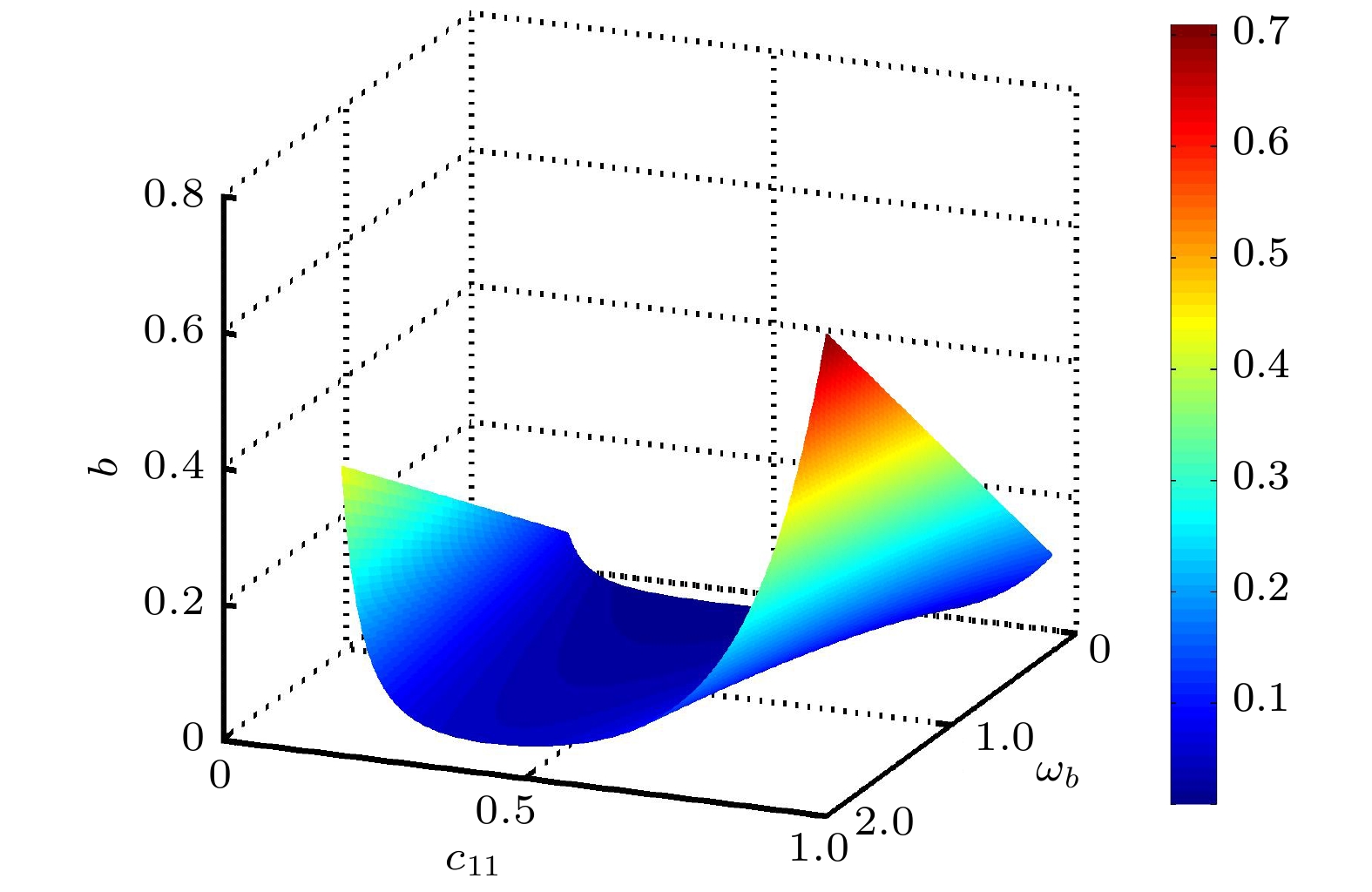
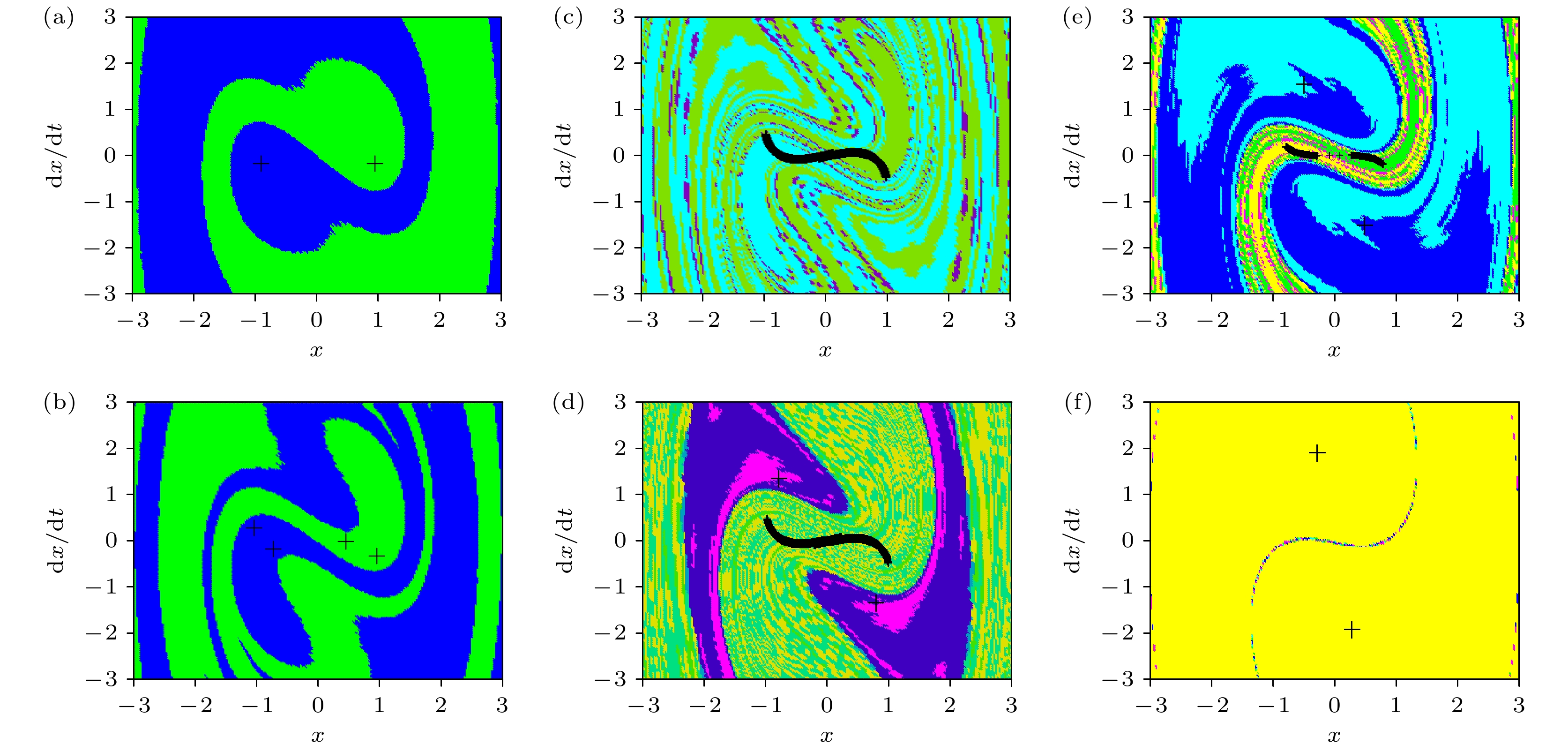
图 24 单摆非线性系统在双参数域上的运动 (a) ωb-c11; (b) c11-k33; (c) k33-g1; (d) g1-b; (e) b-ωb
Fig. 24. Motion of a simple pendulum nonlinear system in the bi-parameter domain: (a) ωb-c11; (b) c11-k33; (c) k33-g1; (d) g1-b; (e) b-ωb
-
[1] Wu Q X, Wang X K, Lin H, Xia M H 2020 Mech. Syst. Signal Process. 144 106968
Google Scholar
[2] Ouyang H M, Tian Z, Yu L L, Zhang G M 2020 J. Frankl. Inst. 357 8299
Google Scholar
[3] Lin B T, Zhang Q W, Fan F, Shen S Z 2020 Appl. Math. Model. 87 606
Google Scholar
[4] Wu S T 2009 J. Sound Vib. 323 1
Google Scholar
[5] 王观, 胡华, 伍康, 李刚, 王力军 2016 物理学报 65 200702
Google Scholar
Wang G, Hu H, Wu K, Li G, Wang L J 2016 Acta Phys. Sin. 65 200702
Google Scholar
[6] Matthews M R 1989 Res. Sci. Educ. 19 187
Google Scholar
[7] Czolczynski K, Perlikowski P, Stefanski A, Kapitaniak T 2009 Physica A 388 5013
Google Scholar
[8] Szumiński W, Woźniak D 2020 Commun. Nonlinear Sci. Numer. Simulat. 83 105099
Google Scholar
[9] Náprstek J, Fischer C 2013 Comput. Struct. 124 74
Google Scholar
[10] Han N, Cao Q J 2017 Int. J. Mech. Sci. 127 91
Google Scholar
[11] Amer T S, Bek M A, Abohamer M K 2019 Mech. Res. Commun. 95 23
Google Scholar
[12] 方潘, 侯勇俊, 张丽萍, 杜明俊, 张梦媛 2016 物理学报 65 014501
Google Scholar
Fang P, Hou Y J, Zhang L P, Du M J, Zhang M Y 2016 Acta Phys. Sin. 65 014501
Google Scholar
[13] Kapitaniak M, Perlikowski P, Kapitaniak T 2013 Commun. Nonlinear Sci. Numer. Simulat. 18 2088
Google Scholar
[14] 萧寒, 唐驾时, 梁翠香 2009 物理学报 58 2989
Google Scholar
Xiao H, Tang J S, Liang C X 2009 Acta Phys. Sin. 58 2989
Google Scholar
[15] 张利娟, 张华彪, 李欣业 2018 物理学报 67 244302
Google Scholar
Zhang L J, Zhang H B, Li X Y 2018 Acta Phys. Sin. 67 244302
Google Scholar
[16] Bek M A, Amer T S, Sirwah M A, Awrejcewicz J, Arab A A 2020 Results Phys. 19 103465
Google Scholar
[17] Butikov E I 2015 Commun. Nonlinear Sci. Numer. Simulat. 20 298
Google Scholar
[18] Zhou L Q, Liu S S, Chen F Q 2017 Chaos Solit. Fract. 99 270
Google Scholar
[19] Franco E, Astolfi A, Baena F R 2018 Mech. Mach. Theory 130 539
Google Scholar
[20] Najdecka A, Kapitaniak T, Wiercigroch M 2015 Int. J. Non-Linear Mech. 70 84
Google Scholar
[21] Stefanski A, Pikunov D, Balcerzak M, Dabrowski A 2020 Int. J. Mech. Sci. 173 105454
Google Scholar
[22] Wijata A, Polczyński K, Awrejcewicz J 2021 Mech. Syst. Signal Process. 150 107229
Google Scholar
[23] Kholostova O V 1995 J. Appl. Maths. Mechs. 59 553
Google Scholar
[24] Jallouli A, Kacem N, Bouhaddi N. 2017 Commun. Nonlinear Sci. Numer. Simulat. 42 1
Google Scholar
[25] Brzeski P, Perlikowski P, Yanchuk S, Kapitaniak T 2012 J. Sound Vib. 331 5347
Google Scholar
[26] Witz J A 1995 Ocean Eng. 22 411
Google Scholar
[27] Peláez J, Andrés Y N 2005 J. Guid. Control Dynam. 28 611
Google Scholar
[28] Li Y S, Yang M M, Sun H X, Liu Z M, Zhang Y 2018 J. Intell. Robot. Syst. 89 485
Google Scholar
[29] Zheng Y J, Shen G X, Li Y G, Li M, Liu H M 2014 J. Iron Steel Res. Int. 21 837
Google Scholar
[30] Kojima H, Fukatsu K, Trivailo P M 2015 Acta Astronaut. 106 24
Google Scholar
[31] Shen G X, Li M 2009 J. Mater. Process. Tech. 209 5002
Google Scholar
[32] Nayfeh A H 1983 J. Sound Vib. 88 1
Google Scholar
[33] Golubitsky M, Schaeffer D G 1985 Singularities and Groups in Bifurcation Theory (Vol. Ⅰ) (New York: Springer-Verlag) pp131−133

 下载:
下载:

计量
- 文章访问数: 9144
- PDF下载量: 184
- 被引次数: 0
