











-
Impatience is a psychological factor that varies from person to person and constantly changes with the environment in real time. In this paper, a model based on cellular automaton is presented to investigate the dynamics of bi-directional flow, with considering individual impatient behaviors. Potential field is defined to represent pedestrian’s interest in available space, which provides an approach to the description of proactive mechanism in bi-directional flow. By formulating the dynamics with controllable parameters, individual impatience level is measured, recorded and updated to trigger off the personalized behaviors. Three different patterns of impatient behaviors are modeled and compared with each other. Simulation results demonstrate the different performances of impatient behavior patterns. Comparing with the situation without considering impatience, bidirectional flow is improved in terms of speed, flow rate and waiting time when impatience level is used to triggers off the sidestep behavior. However, the collective performance shows a deterioration at a most density level when impatience is regarded as a direct parameter to estimate the priority to a target cell among several competitors. The parameter sensitivity analysis of impatience intensity and decision threshold shows the flexibility of the model to present the impatience effect. Simulation experiments under different scenarios also reveal the effects of low proportion of slower pedestrians, walkway width and mixed behavior mode on the efficiency of pedestrian counter flow.
-
Keywords:
- cellular automaton /
- bidirectional pedestrian flow /
- fundamental diagram /
- impatient behavior
[1] Lam W H K, Cheung C Y 2000 Journal of Transportation Engineering-asce 126 343
 Google Scholar
Google Scholar
[2] Lam W H K, Lee J Y S, Cheung C Y 2002 Transportation 29 169
Google Scholar
[3] Corbetta A, Meeusen J, Lee C M, Toschi F 2016 In Pedestrian and Evacuation Dynamics (He Fei: University of Science and Technology of China Press) pp18–24
[4] Kretz T, Gr A, Kaufman M, Mazur F, Schreckenberg M 2006 J. Stat. Mech:Theory Exp. 10 10001
Google Scholar
[5] Helbing D, Buzna L, Johansson A, Werner T 2005 Transp. Sci. 39 1
Google Scholar
[6] Zhang J, Klingsch W, Schadschneider A, Seyfried A 2012 J. Stat. Mech:Theory Exp. 2 P02002
Google Scholar
[7] Xue S Q, Jiang R, Jia B, Wang Z Y, Zhang X 2019 Transp. B Transp. Dyn. 7 169
Google Scholar
[8] Jiang Y Q, Wong S C, Zhang P, Liu R X, Duan Y L, Choi K 2012 APPLIED MATHEMATICS AND COMPUTATION 218 6135
Google Scholar
[9] Hoogendoorn S P, Wageningen-Kessels F L, van Daamen W, Duives D C 2014 Physica A 416 684
Google Scholar
[10] Nagai R, Fukamachi M, Nagatani T 2005 Physica A 358 516
Google Scholar
[11] Blue V J, Adler J L 2001 Transp. Res. Part B 35 293
Google Scholar
[12] Helbing D, Molnar P 1995 Phys. Rev. E 51 4282
Google Scholar
[13] Nagatani T 2009 Phys. Lett. A 373 2917
Google Scholar
[14] Nowak S, Schadschneider A 2012 Phys. Rev. E 85 066128
Google Scholar
[15] Nagatani T 2012 Appl. Math. Modell. 36 702
Google Scholar
[16] 李明华, 袁振洲, 许琰, 田钧方 2015 物理学报 64 018903
Google Scholar
Li M H, Yuan Z Z, Xu Y, Tian J F 2015 Acta Phys. Sin. 64 018903
Google Scholar
[17] Feliciani C, Nishinari K 2016 Phys. Rev. E 94 032304
Google Scholar
[18] Alonso-Marroquín F, Busch J, Chiew C, Lozano C, Ramírez-Gómez Á 2014 Phys. Rev. E 90 063305
Google Scholar
[19] Kwak J, Jo H H, Luttinen T, Kosonen I 2017 Phys. Rev. E 96 022319
Google Scholar
[20] Feliciani C, Nishinari K 2016 Physica A 451 135
Google Scholar
[21] Jin C J, Jiang R, Yin J L, Dong L Y, Li D W 2017 Physica A 482 666
Google Scholar
[22] Fu L B, Song W G, Lo S M 2016 Nonlinear Sci. Numer. Simul. 42 682
Google Scholar
[23] Haghani M, Sarvi M, Shahhoseini Z 2019 Transp. Res. Part A 122 51
Google Scholar
[24] Fu Z J, Zhou X D, Zhu K J, Chen Y Q, Zhuang Y F, Hu Y Q, Yang L Z, Chen C K, Li J 2015 Physica A 420 294
Google Scholar
[25] Weng W G, Chen T, Yuan H Y, Fan W C 2006 Phys. Rev. E 74 036102
Google Scholar
[26] Fu Z J, Zhou X D, Chen Y Q, Gong J H, Peng F, Yan Z D, Zhang T L, Yang L Z 2014 Commun. Nonlinear Sci. Numer. Simul. 20 832
Google Scholar
[27] Zhang D W, Zhu H T, Hostikka S, Qiu S 2019 Physica A 525 72
Google Scholar
[28] 武鑫森, 岳昊, 刘秋梅, 张旭, 邵春福 2021 物理学报 70 068901
Google Scholar
Wu X S, Yue H, Liu Q M, Zhang X, Shao C F 2021 Acta Phys. Sin. 70 068901
Google Scholar
[29] Tang T, Huang H, Shang H 2012 Nonlinear Dyn. 67 437
Google Scholar
[30] Lü Y X, Wu Z X, Guan J Y 2020 Phys. Rev. Res. 2 043250
Google Scholar
[31] 杨灿, 陈群, 陈璐 2019 物理学报 68 240504
Google Scholar
Yang C, Chen Q, Chen L 2019 Acta Phys. Sin. 68 240504
Google Scholar
[32] Kirchner A, Nishinari K, Schadschneider A 2003 Phys. Rev. E 67 056122
Google Scholar
[33] Hidalgo R C, Parisi D R, Zuriguel I 2017 Phys. Rev. E 95 042319
Google Scholar
[34] Helbing D, Farkas I J, Vicsek T 2000 Nature 407 487
Google Scholar
[35] Pastor J M, Garcimartín A, Gago P A, Peralta J P, Martín-Gómez C, Ferrer L M, Maza D, Parisi D R, Pugnaloni L A, Zuriguel I 2015 Phys. Rev. E 92 062817
Google Scholar
[36] Suma Y, Yanagisawa D, Nishinari K 2012 Physica A 391 248
Google Scholar
[37] 金辉, 郭仁拥 2019 物理学报 68 020501
Google Scholar
Jin H, Guo R Y 2019 Acta Phys. Sin. 68 020501
Google Scholar
[38] Ma Y P, Zhang H 2020 Chin. Phys. B 29 038901
Google Scholar
[39] Degond P, Appert-Rolland C, Moussaïd M, Pettré J, Theraulaz G 2013 J. Stat. Phys. 152 1033
Google Scholar
[40] Shi M, Eric W L M, Ma Y, Cao R F 2019 Transp. B Transp. Dyn. 7 1651
Google Scholar
[41] Shi M, Eric W L M, Ma Y 2019 Simul. Modell. Pract. Theory 94 367
Google Scholar
[42] Yu Y F, Song W G 2007 Phys. Rev. E 75 046112
Google Scholar
[43] Yanagisawa D, Kimura A, Tomoeda A, Nishi R, Suma Y, Ohtsuka K, Nishinari K 2009 Phys. Rev. E 80 036110
Google Scholar
[44] Wilensky U http://ccl.northwestern.edu/netlogo/index.shtml [2021-8-20]
-
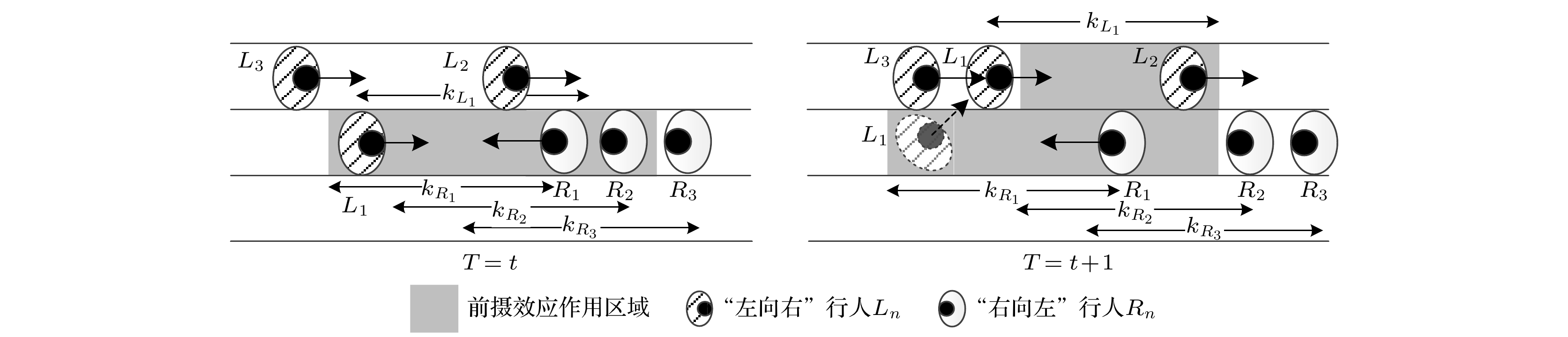
图 1 双向行人的前摄效应
Figure 1. Proactive effect of bi-directional pedestrians.
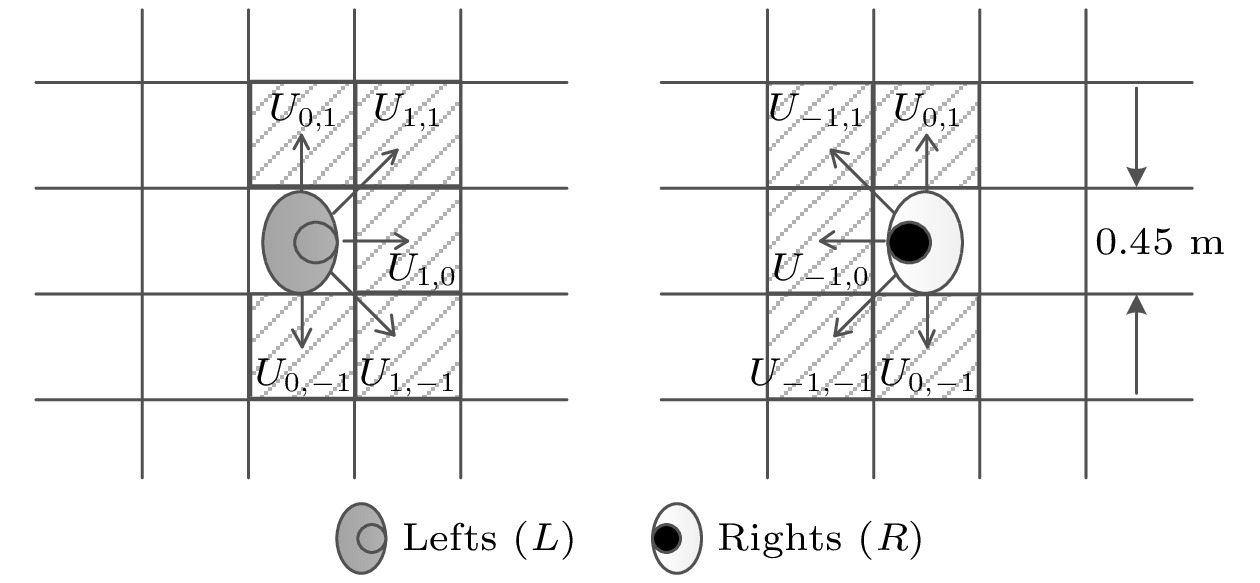
图 2 行人移动的方位及概率
Figure 2. Pedestrian movement space and tendency.

图 3 正在占据的格子的潜在势能场值更新
Figure 3. Potential field value update for occupied cells.

图 4 倾向于占据的格子的潜在势能场值更新
Figure 4. Potential field value update for interested cells.

图 5 3种不耐烦行为模式 (a) 模式1, 不耐烦作为回避的触发因素(R不耐烦水平i > δ); (b) 模式2, 不耐烦作为估计优先权的直接参数(目标格子有4名潜在竞争者, 其中, L的不耐烦水平i 最高且大于δ); (c) 模式3, 不耐烦作为估计优先级的间接参数(R的i × Ui, j最高且不耐烦水平i大于δ)
Figure 5. Three patterns of impatient behaviors: (a) Pattern 1, impatience as a trigger of sidestep (i of R > δ); (b) Pattern 2, impatience as a direct parameter to estimate priority (4 potential competitors for the target cell, L has the largest i (i of L > δ) among all of the potential competitors for the target cell); (c) Pattern 3, impatience as an indirect parameter to estimate priority (R has the largest i × Ui, j (i of R > δ) among all of the potential competitors for the target cell).

图 6 基本规则下的步道形成
Figure 6. Lane formation with Basic movement rules (ρ = 0.3).
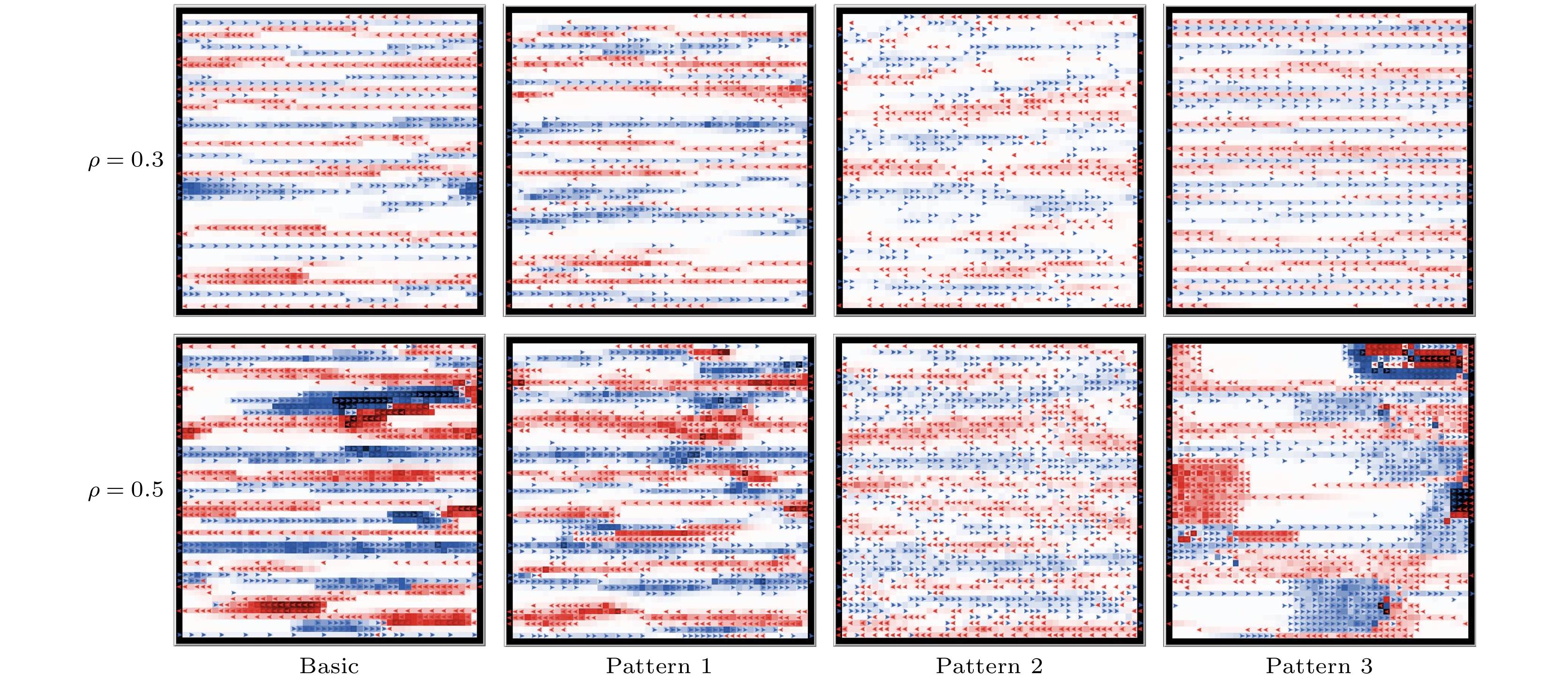
图 7 4种场景下形成的潜在势能场(T = 100)
Figure 7. Potential field generation under 4 scenarios (T = 100).
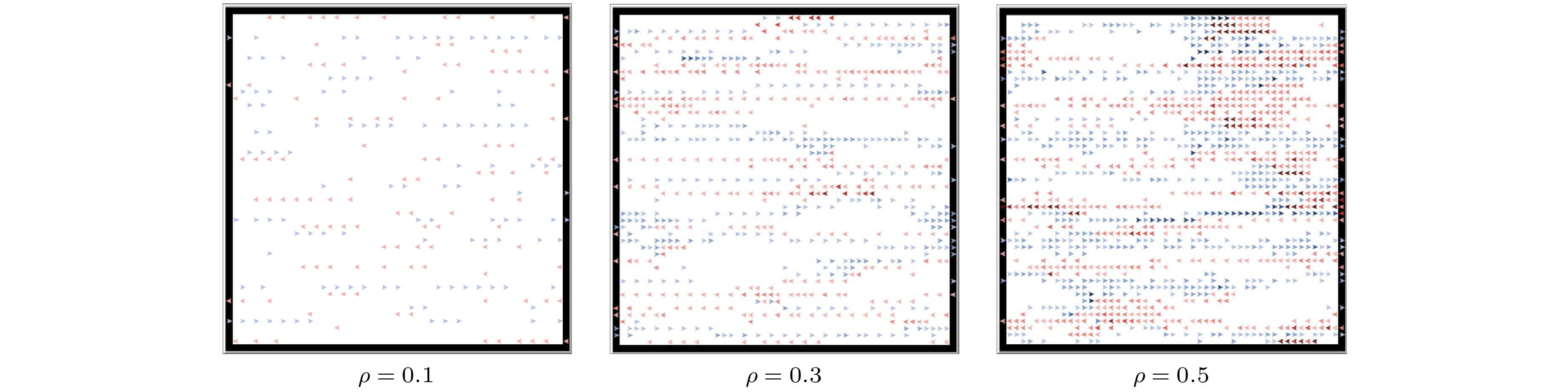
图 8 模式1下不同密度水平个体的不耐烦水平(T = 50)
Figure 8. Individual impatient level under different density levels with Pattern 1 (T = 50).
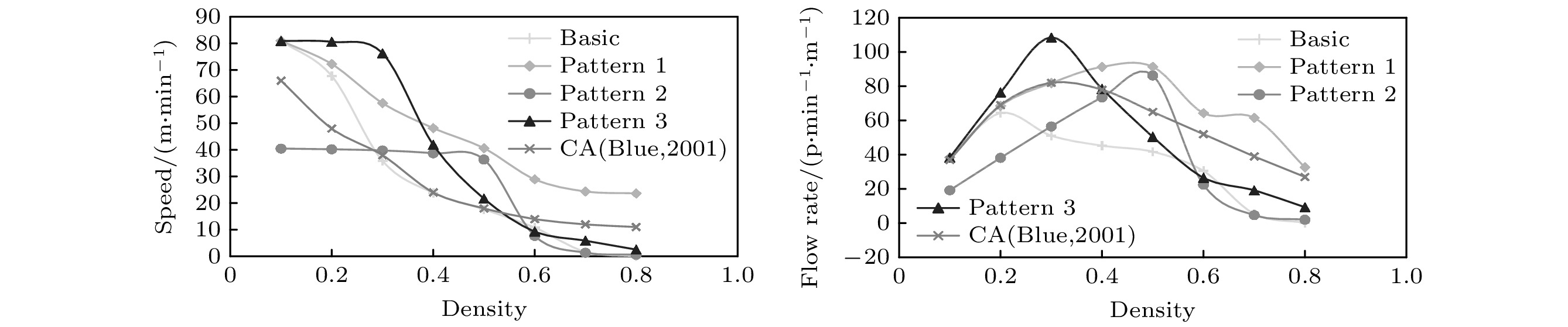
图 9 不同密度水平下速度和流量的差异
Figure 9. Comparison of speed and flow rate under different density levels.
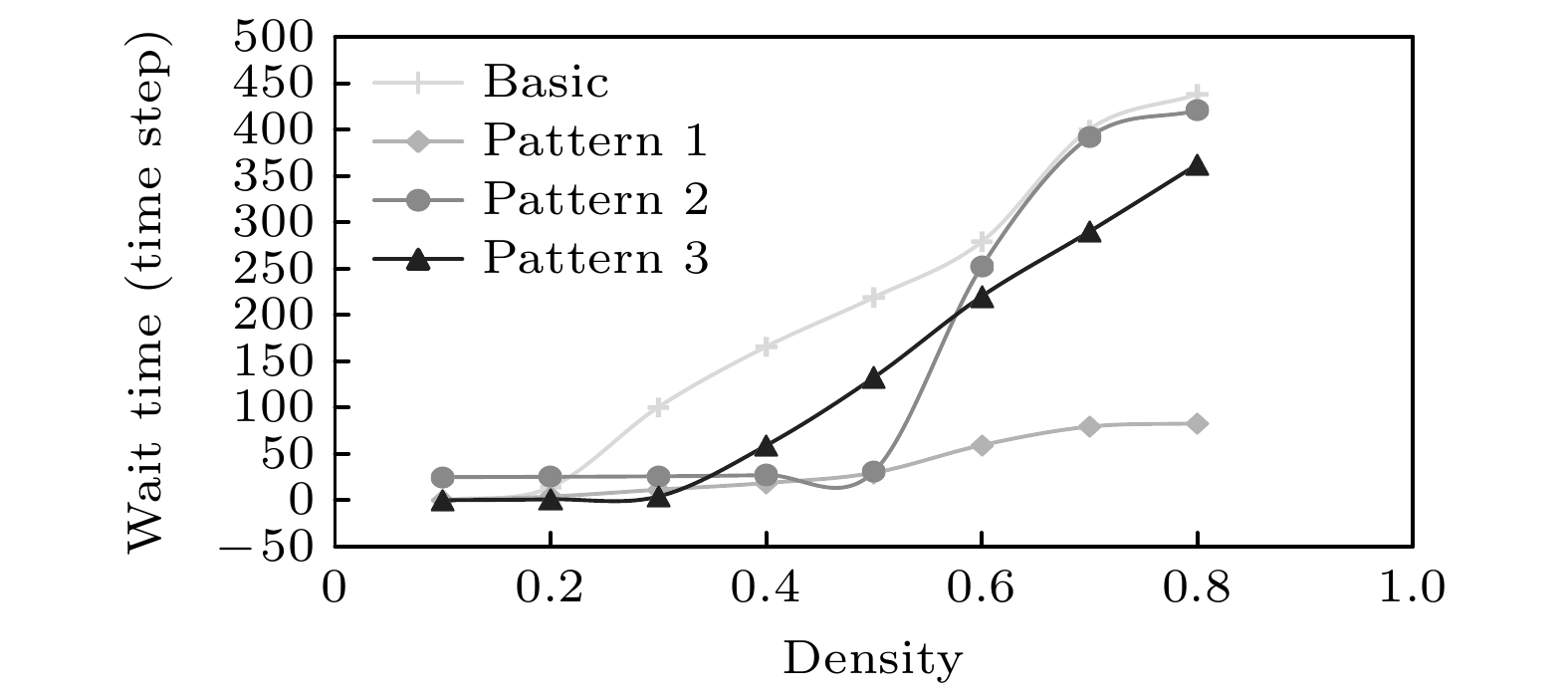
图 10 不同密度水平下的等待时间差异
Figure 10. Wait time under different density levels.
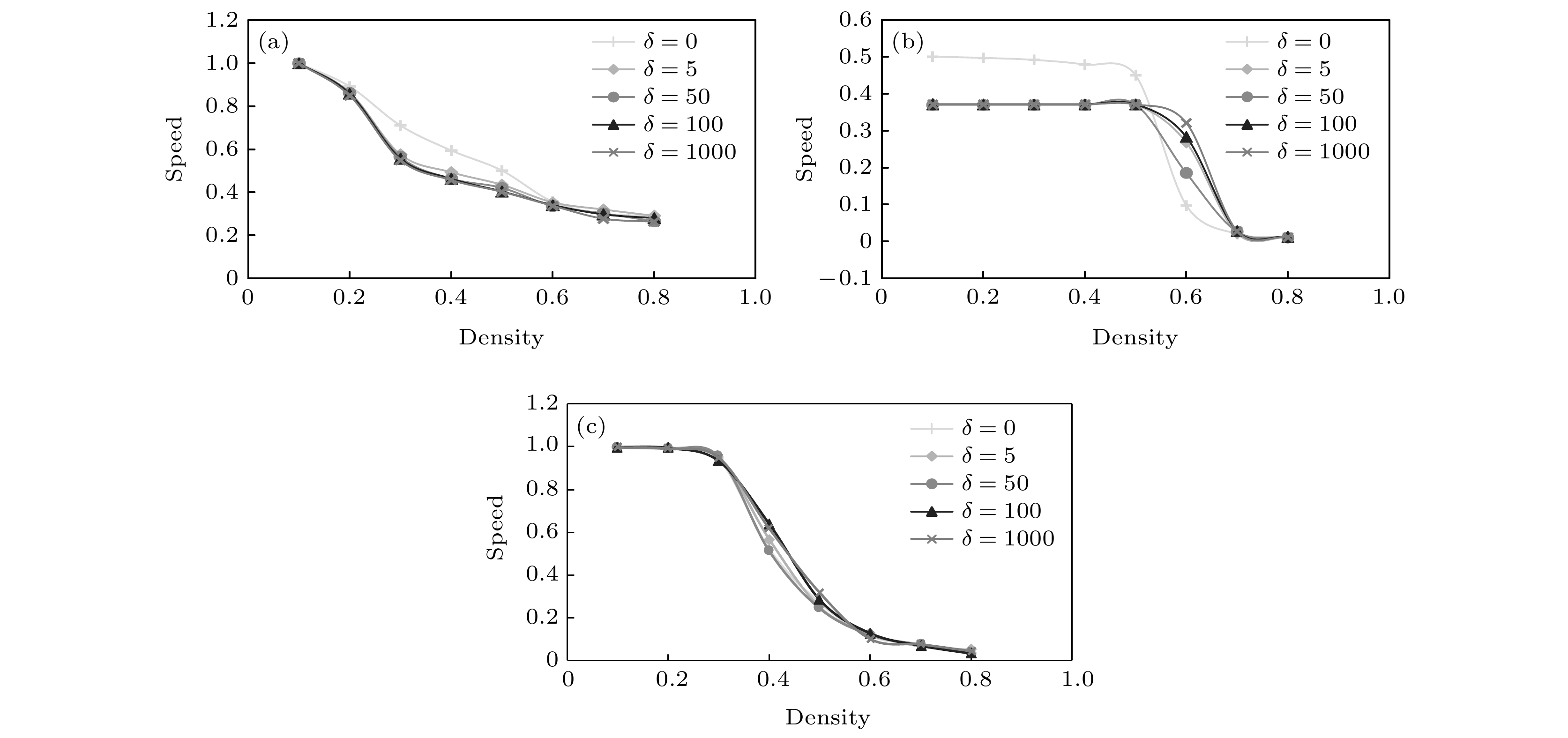
图 11 不同δ情况下速度和密度的关系 (a) 模式1; (b) 模式2; (c) 模式3
Figure 11. Speed vs. Density under different δ: (a) Pattern 1; (b) Pattern 2; (c) Pattern 3.

图 12 不同 α 和 γ 下的速度和等待时间随密度的变化趋势 (a) 模式1的速度; (b) 模式1的等待时间; (c) 模式2的速度; (d) 模式2的等待时间; (e) 模式3的速度; (f) 模式3的等待时间
Figure 12. Speed and wait time vs. density under different α and γ: (a) Speed with Pattern 1; (b) wait time with Pattern 1; (c) speed with Pattern 2; (d) wait time with Pattern 2; (e) speed with Pattern 3; (f) wait time with Pattern 3
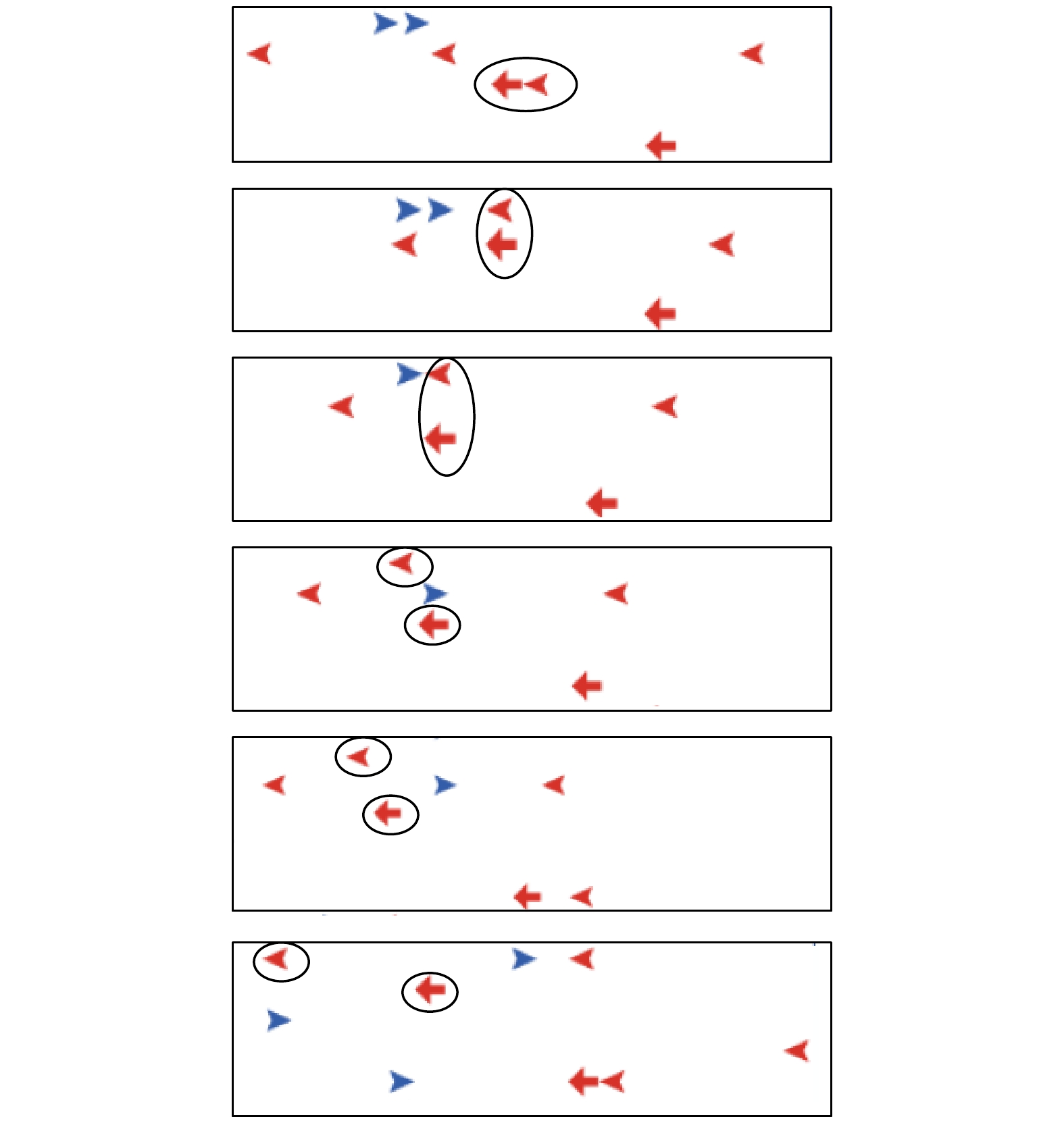
图 13 仿真试验中正常速度行人对慢速行人的超越过程(局部图) 注: 其中三角形代表正常速度行人, 箭头形代表慢速行人
Figure 13. Overtaking process between pedestrians with normal speed and slower speed (Partial screenshot) Note: the triangles represent pedestrians with normal speed and the arrows represent pedestrians with slower speed.

图 14 不同慢速行人比例下速度和密度的关系 (a) 模式1; (b) 模式2; (c) 模式3
Figure 14. Speed vs. density under different proportion of slower pedestrians: (a) Pattern 1; (b) Pattern 2; (c) Pattern 3.

图 15 混合模式不同密度下速度、流率、等待时间的变化 (a) 速度与密度关系; (b)流率与密度关系; (c) 等待时间与密度关系
Figure 15. Speed, flow rate and wait time under different density levels with mix impatience patterns: (a) Speed; (b) flow rate; (c) wait time.
表 1 参数及其物理意义
Table 1. Some parameters and the corresponding physical meanings.
符号 物理意义 $ U_{i, j}^d $ 行走方向为d的行人向格子(i, j)移动的转移概率, d表示“右向左”或“左向右” $ E_{i, j}^d $, $ E_{i, j}^{\bar d} $ 取决于方向d或 $ \overline {\boldsymbol{d}} $ 行人的格子(i, j)的潜在势能场值, 当d表示“右向左”, 则$ \overline {\boldsymbol{d}} $表示“左向右”, 反之亦然 $ E_{i, j}^{\rm{l}} $, $ E_{i, j}^{\rm{r}} $ 取决于“右向左”或“左向右”行人的格子(i, j)的潜在势能场值, $ E_{i, j}^{\rm{l}} $表示“左向右”, $ E_{i, j}^{\rm{r}} $表示“右向左” T 时间步 k 行人前进方向上前方k个格子(即受影响格子) β 潜在势能场值的衰减率, 0 ≤ β ≤ 1 i 行人的不耐烦水平 α 不耐烦水平增长率, α ≥ 1 γ 不耐烦水平衰减率, 0 ≤ γ ≤ 1 δ 影响决策的不耐烦水平阈值, δ ≥ 0  DownLoad: CSV
DownLoad: CSV
表 2 不考虑不耐烦情况下“右向左”行人R的基本运动规则
Table 2. Basic movement rules a pedestrian of Rights without considering impatience.
Step 1: 比较$ {U_{{{ - 1, 0}}}} $, $ {U_{{{ - 1, 1}}}} $ 和 $ {U_{{{ - 1, - 1}}}} $, 具备最大$ {U_{i, j}} $ 值的空闲格子(i, j)被选为目标格子, 转Step 2; 如果3个格子均无空闲,
跳转至Step 4;Step 2: 将当前格子的$ {E^{\rm{r}}} $值$ E_{{{0, 0}}}^{\rm{r}} $ 设为 $ E_{0, 0}^{\rm{r}} $ + 1, 转Step 3; Step 3: 移向目标格子, 转Step 5; Step 4: 停留在当前格子, 将右前格子的$ E_{ - 1, 1}^{\rm{r}} $设为 $ E_{ - 1, 1}^{\rm{r}} $ + 1, 将左前格子的$ E_{ - 1, - 1}^{\rm{r}} $设为 $ E_{ - 1, - 1}^{\rm{r}} $ + 1, 转Step 6; Step 5: 将走行方向上前k个格子的 $ E_{ - k, 0}^{\rm{r}} $设为$ E_{ - k, 0}^{\rm{r}} $ + 1, 转 Step 6; Step 6: 将所有空闲格子的$ {E^{\rm{r}}} $设为$ {E^{\rm{r}}} $ × β. 对于“左向右”行人, $ {E^{\rm{l}}} $的更新规则类似. 当多人选择同一目标格子时, 随机选择一人移动.
DownLoad: CSV
表 3 模式1的规则
Table 3. Rules of Pattern 1.
Step 1: 比较前进方向3个格子的$ {U_{{{ - 1, 0}}}} $, $ {U_{{{ - 1, 1}}}} $ 和 $ {U_{{{ - 1, - 1}}}} $, 具备最大$ {U_{i, j}} $的空闲格子 (i, j) 被选为目标格子, 转Step 2; 如果3个格子
均非空且i > δ, 跳转Step 7; 否则, 跳转 Step 4;Step 2—Step 6: 与表2规则中的Step 2—Step 6 相同; Step 7: 比较左右横向格子的$ {U_{{{0, 1}}}} $ 和 $ {U_{{{0, - 1}}}} $, 具备最大$ {U_{i, j}} $的空闲格子 (i, j) 被选为目标格子, 转Step 2; 如果两个格子均非空, 跳转
Step 4.
DownLoad: CSV
表 4 模式2的规则
Table 4. Rules of Pattern 2.
Step 1: 比较前进方向3个格子的$ {U_{{{ - 1, 0}}}} $, $ {U_{{{ - 1, 1}}}} $ 和 $ {U_{{{ - 1, - 1}}}} $, 具备最大$ {U_{i, j}} $的空闲格子 (i, j) 被选为目标格子, 判断该行人是否在竞
争者中具备最大i (i > δ), 是转Step 2, 否跳转Step 7; 如果3个格子均非空, 跳转 Step7;Step 2—Step 6: 与表2规则中的 Step 2—Step 6 相同; Step 7: 依次针对该行人周边的空闲格子判断该行人是否在竞争者中具备最大i (i > δ), 是则对应的格子选为目标格子, 转Step 2; 否跳
转 Step 4.
DownLoad: CSV
表 5 模式3的规则
Table 5. Rules of Pattern 3.
Step 1: 比较前进方向3个格子的$ {U_{{{ - 1, 0}}}} $, $ {U_{{{ - 1, 1}}}} $和 $ {U_{{{ - 1, - 1}}}} $, 具备最大$ {U_{i, j}} $(i ≤ δ) 或 $ {U_{i, j}} \times i $(i > δ)的空闲格子 (i, j) 被选为目标格
子, 判断该行人是否在竞争者中具备最大的$ {U_{i, j}} $(i ≤ δ) 或 $ {U_{i, j}} \times i $(i > δ), 是转Step 2, 否跳转Step 7; 如果3个格子均非空,
跳转Step 7;Step 2—Step 6: 与表2规则中的Step 2—Step 6 相同; Step 7: 依次针对该行人周边的空闲格子判断该行人是否在竞争者中具备最大$ {U_{i, j}} $(i ≤ δ) 或 $ {U_{i, j}} \times i $ (i > δ), 是则对应的格子选为
目标格子, 转Step 2; 否跳转 Step 4.
DownLoad: CSV
表 6 统计指标及其含义
Table 6. Definitions of statistic index.
指标 含义 计算方法 Speed 速度 每一时间步向前进方向3个邻居格子(正前、左前、右前)移动的人数比总计人数 Flow rate 流率 每一时间步移动穿过右侧边界的“左向右”行人数量与移动穿过左侧边界的“右向左”行人数量之和 Waiting time 等待时间 行人原地停滞等待的时间步之和比总计人数
DownLoad: CSV
-
[1] Lam W H K, Cheung C Y 2000 Journal of Transportation Engineering-asce 126 343
Google Scholar
[2] Lam W H K, Lee J Y S, Cheung C Y 2002 Transportation 29 169
Google Scholar
[3] Corbetta A, Meeusen J, Lee C M, Toschi F 2016 In Pedestrian and Evacuation Dynamics (He Fei: University of Science and Technology of China Press) pp18–24
[4] Kretz T, Gr A, Kaufman M, Mazur F, Schreckenberg M 2006 J. Stat. Mech:Theory Exp. 10 10001
Google Scholar
[5] Helbing D, Buzna L, Johansson A, Werner T 2005 Transp. Sci. 39 1
Google Scholar
[6] Zhang J, Klingsch W, Schadschneider A, Seyfried A 2012 J. Stat. Mech:Theory Exp. 2 P02002
Google Scholar
[7] Xue S Q, Jiang R, Jia B, Wang Z Y, Zhang X 2019 Transp. B Transp. Dyn. 7 169
Google Scholar
[8] Jiang Y Q, Wong S C, Zhang P, Liu R X, Duan Y L, Choi K 2012 APPLIED MATHEMATICS AND COMPUTATION 218 6135
Google Scholar
[9] Hoogendoorn S P, Wageningen-Kessels F L, van Daamen W, Duives D C 2014 Physica A 416 684
Google Scholar
[10] Nagai R, Fukamachi M, Nagatani T 2005 Physica A 358 516
Google Scholar
[11] Blue V J, Adler J L 2001 Transp. Res. Part B 35 293
Google Scholar
[12] Helbing D, Molnar P 1995 Phys. Rev. E 51 4282
Google Scholar
[13] Nagatani T 2009 Phys. Lett. A 373 2917
Google Scholar
[14] Nowak S, Schadschneider A 2012 Phys. Rev. E 85 066128
Google Scholar
[15] Nagatani T 2012 Appl. Math. Modell. 36 702
Google Scholar
[16] 李明华, 袁振洲, 许琰, 田钧方 2015 物理学报 64 018903
Google Scholar
Li M H, Yuan Z Z, Xu Y, Tian J F 2015 Acta Phys. Sin. 64 018903
Google Scholar
[17] Feliciani C, Nishinari K 2016 Phys. Rev. E 94 032304
Google Scholar
[18] Alonso-Marroquín F, Busch J, Chiew C, Lozano C, Ramírez-Gómez Á 2014 Phys. Rev. E 90 063305
Google Scholar
[19] Kwak J, Jo H H, Luttinen T, Kosonen I 2017 Phys. Rev. E 96 022319
Google Scholar
[20] Feliciani C, Nishinari K 2016 Physica A 451 135
Google Scholar
[21] Jin C J, Jiang R, Yin J L, Dong L Y, Li D W 2017 Physica A 482 666
Google Scholar
[22] Fu L B, Song W G, Lo S M 2016 Nonlinear Sci. Numer. Simul. 42 682
Google Scholar
[23] Haghani M, Sarvi M, Shahhoseini Z 2019 Transp. Res. Part A 122 51
Google Scholar
[24] Fu Z J, Zhou X D, Zhu K J, Chen Y Q, Zhuang Y F, Hu Y Q, Yang L Z, Chen C K, Li J 2015 Physica A 420 294
Google Scholar
[25] Weng W G, Chen T, Yuan H Y, Fan W C 2006 Phys. Rev. E 74 036102
Google Scholar
[26] Fu Z J, Zhou X D, Chen Y Q, Gong J H, Peng F, Yan Z D, Zhang T L, Yang L Z 2014 Commun. Nonlinear Sci. Numer. Simul. 20 832
Google Scholar
[27] Zhang D W, Zhu H T, Hostikka S, Qiu S 2019 Physica A 525 72
Google Scholar
[28] 武鑫森, 岳昊, 刘秋梅, 张旭, 邵春福 2021 物理学报 70 068901
Google Scholar
Wu X S, Yue H, Liu Q M, Zhang X, Shao C F 2021 Acta Phys. Sin. 70 068901
Google Scholar
[29] Tang T, Huang H, Shang H 2012 Nonlinear Dyn. 67 437
Google Scholar
[30] Lü Y X, Wu Z X, Guan J Y 2020 Phys. Rev. Res. 2 043250
Google Scholar
[31] 杨灿, 陈群, 陈璐 2019 物理学报 68 240504
Google Scholar
Yang C, Chen Q, Chen L 2019 Acta Phys. Sin. 68 240504
Google Scholar
[32] Kirchner A, Nishinari K, Schadschneider A 2003 Phys. Rev. E 67 056122
Google Scholar
[33] Hidalgo R C, Parisi D R, Zuriguel I 2017 Phys. Rev. E 95 042319
Google Scholar
[34] Helbing D, Farkas I J, Vicsek T 2000 Nature 407 487
Google Scholar
[35] Pastor J M, Garcimartín A, Gago P A, Peralta J P, Martín-Gómez C, Ferrer L M, Maza D, Parisi D R, Pugnaloni L A, Zuriguel I 2015 Phys. Rev. E 92 062817
Google Scholar
[36] Suma Y, Yanagisawa D, Nishinari K 2012 Physica A 391 248
Google Scholar
[37] 金辉, 郭仁拥 2019 物理学报 68 020501
Google Scholar
Jin H, Guo R Y 2019 Acta Phys. Sin. 68 020501
Google Scholar
[38] Ma Y P, Zhang H 2020 Chin. Phys. B 29 038901
Google Scholar
[39] Degond P, Appert-Rolland C, Moussaïd M, Pettré J, Theraulaz G 2013 J. Stat. Phys. 152 1033
Google Scholar
[40] Shi M, Eric W L M, Ma Y, Cao R F 2019 Transp. B Transp. Dyn. 7 1651
Google Scholar
[41] Shi M, Eric W L M, Ma Y 2019 Simul. Modell. Pract. Theory 94 367
Google Scholar
[42] Yu Y F, Song W G 2007 Phys. Rev. E 75 046112
Google Scholar
[43] Yanagisawa D, Kimura A, Tomoeda A, Nishi R, Suma Y, Ohtsuka K, Nishinari K 2009 Phys. Rev. E 80 036110
Google Scholar
[44] Wilensky U http://ccl.northwestern.edu/netlogo/index.shtml [2021-8-20]

 DownLoad:
DownLoad:
Catalog
Metrics
- Abstract views: 6760
- PDF Downloads: 82
- Cited By: 0
