










-
鉴于谱域光学相干层析成像(spectral-domain optical coherence tomography, SD-OCT)系统通常存在非线性采样与色散失配等问题, 需要额外的数据处理步骤. 此外, 所需要的成像区域往往是整个成像区域的一小部分, 对于整个成像区域的计算带来了算力资源浪费, 而且在离散界面的定位方面, 有限的轴向分辨率下亚像素偏差的存在限制了界面的测量精度. 针对以上问题, 本文提出了一种基于复数主从(complex master slave, CMS) OCT相位信息的离散界面快速定位方法. 联合谱域与深度域的相位信息, 精确求解CMS-OCT的重建模板, 并利用CMS-OCT的相位信息, 实现高精度的光程差检测与离散界面定位. 最后, 通过精密光学量规和光学透镜离散界面实验验证了所提出方法能够在快速定位的同时, 保持较高的分辨率和稳定性. 本文所提出的方法有效地解决了SD-OCT系统的非线性采样与色散失配问题, 实现了局域范围内的高精度界面快速定位, 有望促进SD-OCT在光学透镜离散界面测量方面的应用.
-
关键词:
- 谱域光学相干层析成像 /
- 复数主从算法 /
- 亚像素偏差 /
- 光程差检测
Spectral-domain optical coherence tomography (SD-OCT) system has the advantages of non-invasive, non-contact, fast imaging and low cost. It has important applications in the measurement of discrete interface of optical lens. However, the interference spectrum collected by spectral domain OCT system inevitably encounters some problems such as the unequal interval spectrum sampling and chromatic dispersion between two interference arms. In order to ensure that the axial resolution and sensitivity of the system are not reduced, subsequent data processing steps such as spectrum resampling and dispersion compensation need adding, which greatly reduces the real-time performance of measurement. In addition, in the actual measurement process, the required imaging area is often only a small part of the whole imaging area, the calculation of the whole imaging area brings a certain waste of computing power and resources. Moreover, in the positioning of discrete interface, the existence of sub-pixel deviation under limited axial resolution limits the measurement accuracy of interface. To solve the above problems, in this work proposed is a method of fast locating discrete interfaces based on complex master slave (CMS) OCT phase information. By combining the phase information of spectral domain and depth domain, the reconstruction template of CMS-OCT is solved accurately, and the phase information of CMS-OCT is used to achieve high-precision optical path difference detection and discrete interface location. Finally, experiments with precise optical gauge and discrete interface of optical lens verify that the proposed method can maintain high resolution and stability while fast locating is implemented.-
Keywords:
- spectral domain optical coherence tomography /
- complex master-slave algorithm /
- subpixel deviation /
- optical path difference detection
[1] Dube B, Cicala R, Closz A, Rolland J P 2017 Appl. Opt. 56 5661
 Google Scholar
Google Scholar
[2] 刘尚阔, 王涛, 李坤 2021 物理学报 70 134208
Google Scholar
Liu S K, Wang T, Li k 2021 Acta Phys. Sin. 70 134208
Google Scholar
[3] Fukatsu H, Yanagi K 2005 Microsyst. Technol. 11 582
Google Scholar
[4] Binnig G, Rohrer H, Gerber C, Weibel E 1982 Phys. Rev. Lett. 49 57
Google Scholar
[5] Binnig G, Quate C F, Gerber Ch 1986 Phys. Rev. Lett. 56 930
Google Scholar
[6] Wyant J C, O′Neill P K 1974 Appl. Opt. 13 2762_1
Google Scholar
[7] Deck L, Groot P D 1995 Int. J. Mach. Tool. Mane. 35 147
Google Scholar
[8] Bruning J H, Herriott D R, Gallagher J E, Rosenfeld D P, White A D, Brangaccio D J 1974 Appl. Opt. 13 2693
Google Scholar
[9] Zhao W, Sun R, Qiu L, Shi L, Sha D 2010 Opt. Express 18 3608
Google Scholar
[10] Liu J A, Chen J J, Liu J L, Feng S L, Yang J, Song N, Sun C, Cui J C 2018 Appl. Opt. 57 F50
Google Scholar
[11] Awaja F, Arhatari B, Wiesauer K, Leiss E, Stifter D 2009 Polym. Degrad. Stabil. 94 1814
Google Scholar
[12] Bertilson M, Hofsten O V, Vogt U, Holmberg A, Hertz H M 2009 Opt. Express 17 11057
Google Scholar
[13] 吴彤, 孙帅帅, 王绪晖, 王吉明, 赫崇君, 顾晓蓉, 刘友文 2018 物理学报 67 104208
Google Scholar
Wu T, Sun S S, Wang X H, Wang J M, He C J, Gu X R, Liu Y W 2018 Acta Phys. Sin. 67 104208
Google Scholar
[14] Choi W J, Park K S, Eom T J, Oh M K, Lee B H 2012 Opt. Lett. 37 2784
Google Scholar
[15] 梁艳梅, 周大川, 孟凡勇, 王明伟 2007 物理学报 56 3246
Google Scholar
Liang Y M, Zhou D C, Meng F Y, Wang M W 2007 Acta Phys. Sin. 56 3246
Google Scholar
[16] Leitgeb R, Hitzenberger C K, Fercher A F 2003 Opt. Express 11 889
Google Scholar
[17] Boer J F D, Cense B, Park B H, Pierce M C, Bouma B E 2003 Opt. Lett. 28 2067
Google Scholar
[18] Chong G T, Farsiu S, Freedman S F, Sarin N, Koreishi A F, Izatt J A, Toth C A 2009 Arch. Ophthalmol-Chic. 127 37
Google Scholar
[19] Yan Y, Ding Z, Shen Y, Chen Z, Zhao C, Ni Y 2013 Opt. Express 21 25734
Google Scholar
[20] Choma M, Sarunic M, Yang C, Izatt J 2003 Opt. Express 11 2183
Google Scholar
[21] Chang R T, Knight O J, Feuer W J, Budenz D L 2009 Ophthalmology 116 2294
Google Scholar
[22] Lei Y, Hui X, Chen J X 2018 Appl. Opt. 57 9789
Google Scholar
[23] Beaurepaire, C A, Boccara, Lebec, Blanchot, Saint-Jalmes 1998 Opt. Lett. 23 244
Google Scholar
[24] Hu Z, Rollins A M 2007 Opt. Lett. 32 3525
Google Scholar
[25] Edith Perret T E B, Heuberger M 2010 Appl. Spectrosc. 64 1139
Google Scholar
[26] Wojtkowski M, Leitgeb R, Kowalczyk A, Bajraszewski T, Fercher A F 2002 J. Biomed. Opt. 7 457
Google Scholar
[27] Rosa C C, Rogers J A, Podoleanu A 2005 Opt. Lett. 30 3263
Google Scholar
[28] Marks D L, Oldenburg A, Reynolds J J, Boppart S A 2002 Proceedings of the Proceedings IEEE International Symposium on Biomedical Imaging Washington DC, USA, July 7–10, 2002 p621
[29] Rivet S, Maria M, Bradu A, Feuchter T, Podoleanu A 2016 Opt. Express 24 2885
Google Scholar
[30] Bradu A, Israelsen N M, Maria M, Marques M J, Rivet S, Feuchter T, Bang O, Podoleanu A 2018 Sci. Rep. 8 15445
Google Scholar
[31] Podoleanu A, Bradu A, Marques M, Rivet S 2019 High-Speed Biomedical Imaging and Spectroscopy IV San Francisco, California, United States, March 4 , 2019 p1088908
[32] 唐弢, 赵晨, 陈志彦, 李鹏, 丁志华 2015 物理学报 64 174201
Google Scholar
Tang T, Zhao C, Chen Z Y, Li P, Ding Z H 2015 Acta Phys. Sin. 64 174201
Google Scholar
-
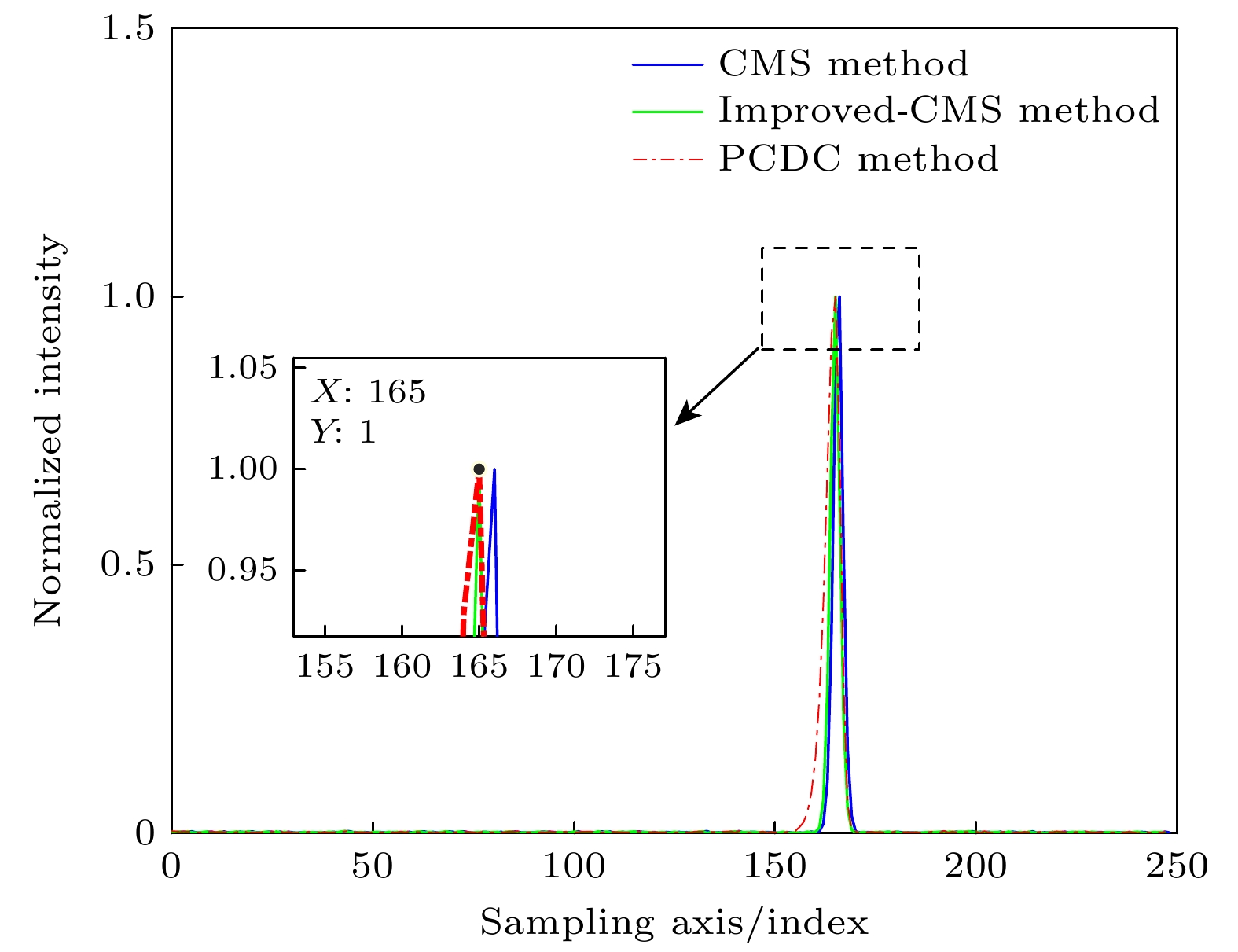
图 3 PCDC算法、传统CMS算法和改进的CMS算法的定位结果
Fig. 3. Positioning results of PCDC algorithm, traditional CMS algorithm and improved CMS algorithm.

图 4 CMS算法和FFT算法运算时间的比较
Fig. 4. Comparison of the operation time between CMS algorithm and FFT algorithm.
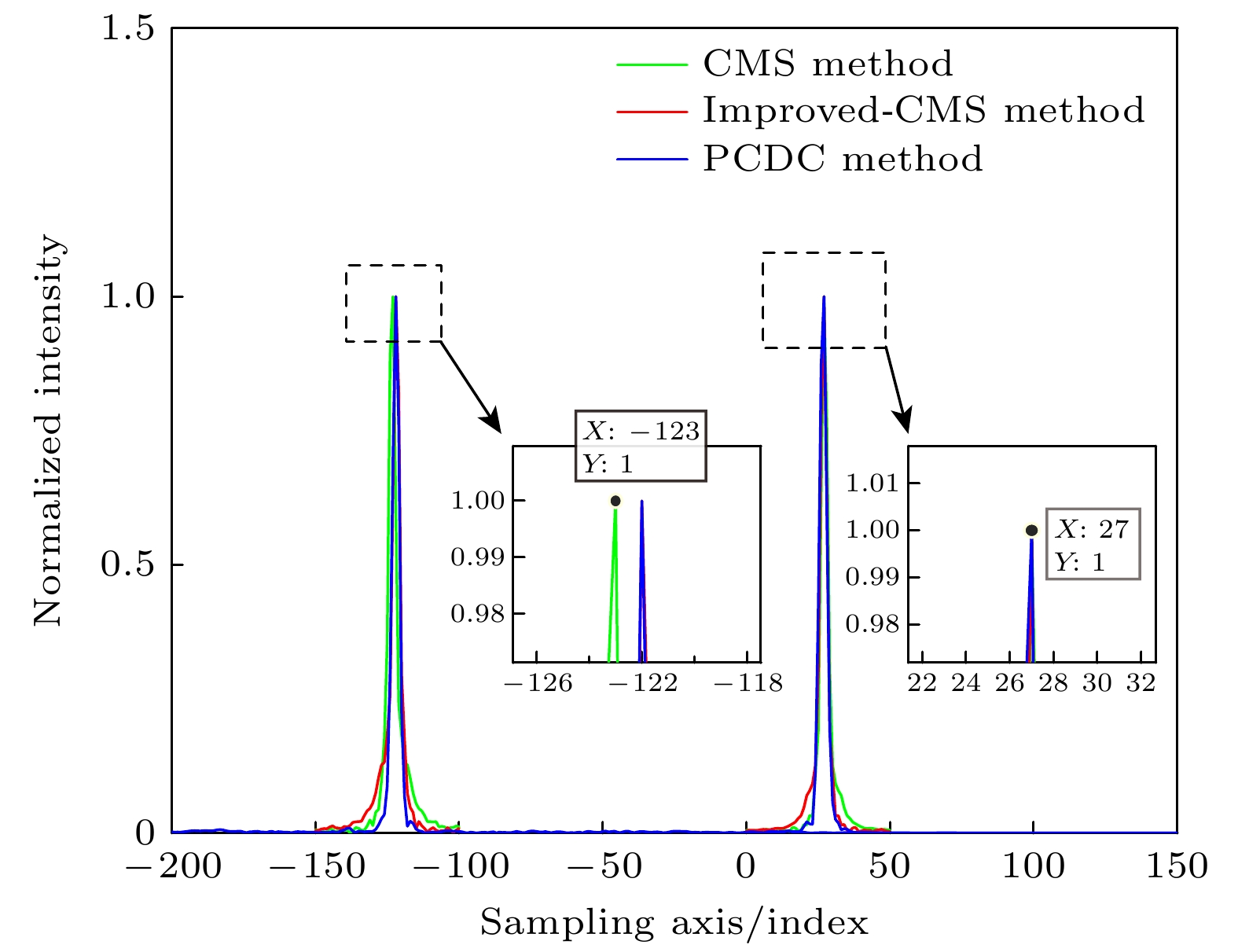
图 5 PCDC算法、传统CMS算法和改进的CMS算法对厚度分别为1250 μm和1350 μm的金属量规的定位结果
Fig. 5. Positioning results of metal gauges with a thickness of 1250 μm and 1350 μm obtained from the PCDC algorithm, the traditional CMS algorithm and the improved CMS algorithm.
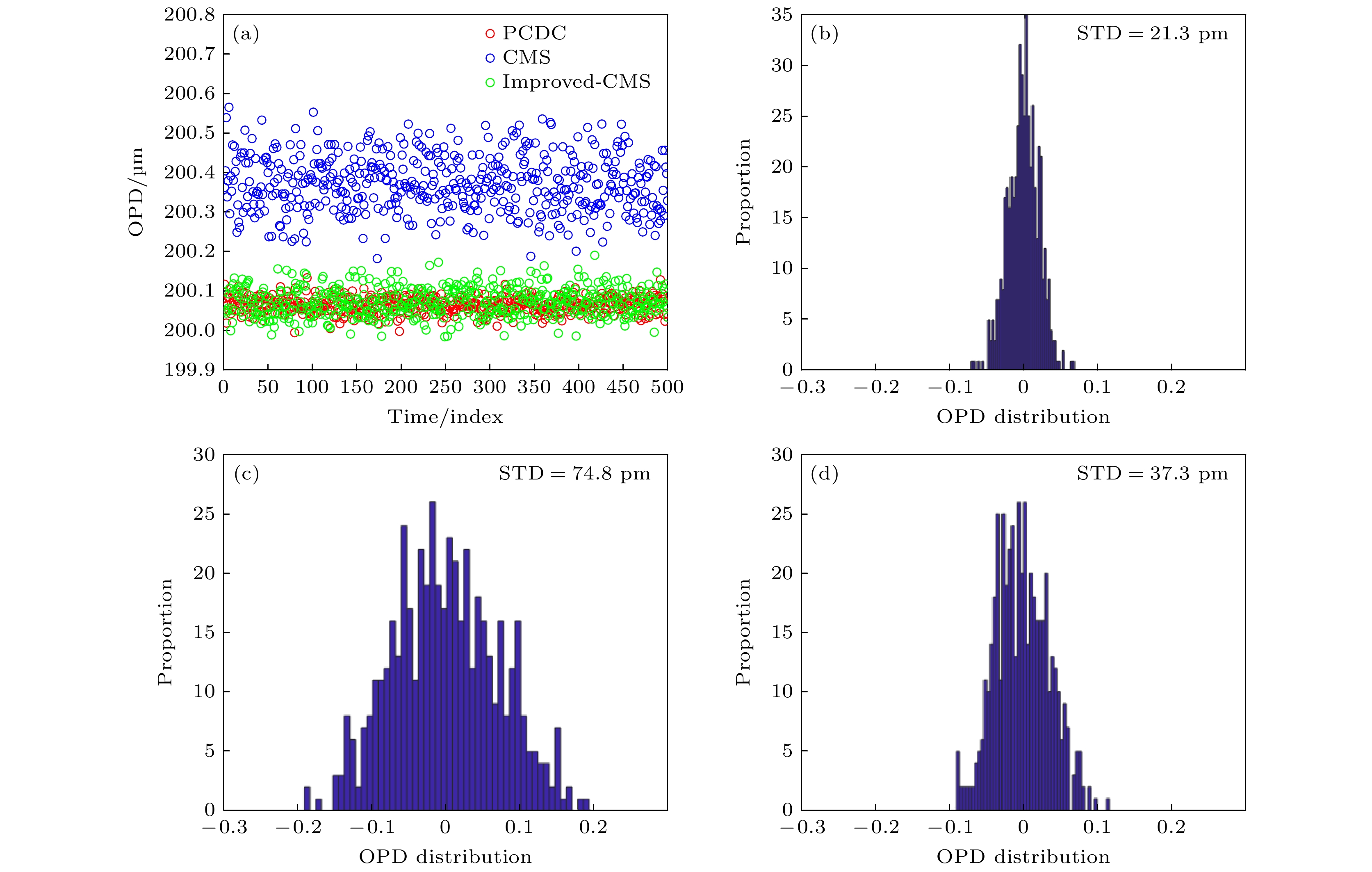
图 6 (a) 用PCDC算法(红色)、传统CMS算法(蓝色)以及改进的CMS算法(绿色)求取的OPD; (b) 用PCDC算法求取的OPD分布情况; (c) 用传统CMS算法求取的OPD分布情况; (d) 用改进的CMS算法求取的OPD分布情况
Fig. 6. (a) OPD obtained by PCDC algorithm (red), traditional CMS algorithm (blue) and improved CMS algorithm (green); (b) OPD distribution obtained by PCDC algorithm; (c) OPD distribution obtained by traditional CMS algorithm; (d) OPD distribution obtained by improved CMS algorithm.
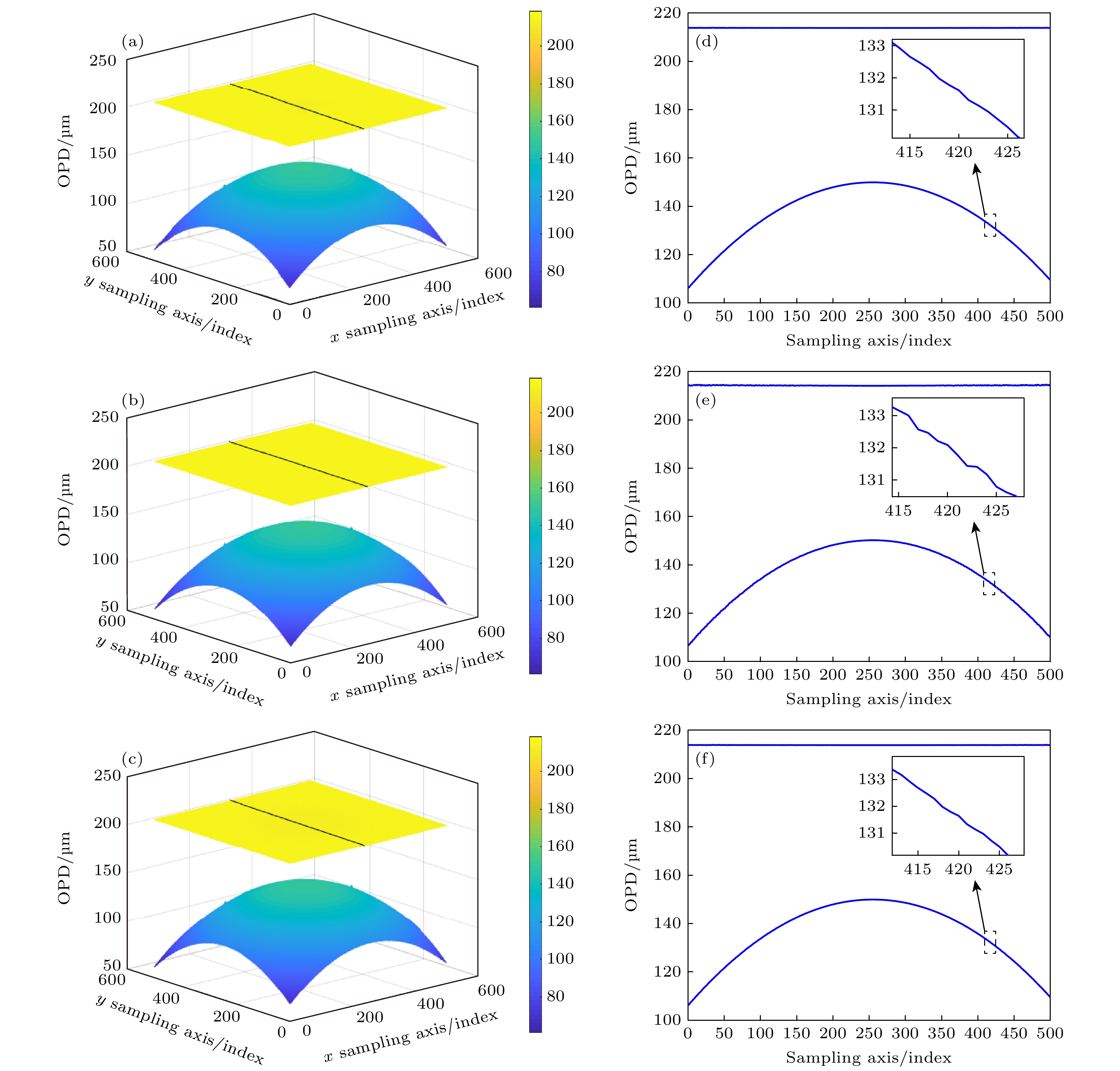
图 8 光学透镜离散界面定位结果 (a) PCDC算法的定位结果; (b)传统CMS算法的定位结果; (c)改进的CMS算法的定位结果; (d)—(f)分别对应图(a)—(c)中黑线位置处的轴向剖面图
Fig. 8. Positioning results of optical lens discrete interface: (a) Positioning results of PCDC algorithm; (b) positioning results of traditional CMS algorithm; (c) positioning results of improved CMS algorithm; (d)–(f) axial section at the black line in panel (a)–(c), respectively.
-
[1] Dube B, Cicala R, Closz A, Rolland J P 2017 Appl. Opt. 56 5661
Google Scholar
[2] 刘尚阔, 王涛, 李坤 2021 物理学报 70 134208
Google Scholar
Liu S K, Wang T, Li k 2021 Acta Phys. Sin. 70 134208
Google Scholar
[3] Fukatsu H, Yanagi K 2005 Microsyst. Technol. 11 582
Google Scholar
[4] Binnig G, Rohrer H, Gerber C, Weibel E 1982 Phys. Rev. Lett. 49 57
Google Scholar
[5] Binnig G, Quate C F, Gerber Ch 1986 Phys. Rev. Lett. 56 930
Google Scholar
[6] Wyant J C, O′Neill P K 1974 Appl. Opt. 13 2762_1
Google Scholar
[7] Deck L, Groot P D 1995 Int. J. Mach. Tool. Mane. 35 147
Google Scholar
[8] Bruning J H, Herriott D R, Gallagher J E, Rosenfeld D P, White A D, Brangaccio D J 1974 Appl. Opt. 13 2693
Google Scholar
[9] Zhao W, Sun R, Qiu L, Shi L, Sha D 2010 Opt. Express 18 3608
Google Scholar
[10] Liu J A, Chen J J, Liu J L, Feng S L, Yang J, Song N, Sun C, Cui J C 2018 Appl. Opt. 57 F50
Google Scholar
[11] Awaja F, Arhatari B, Wiesauer K, Leiss E, Stifter D 2009 Polym. Degrad. Stabil. 94 1814
Google Scholar
[12] Bertilson M, Hofsten O V, Vogt U, Holmberg A, Hertz H M 2009 Opt. Express 17 11057
Google Scholar
[13] 吴彤, 孙帅帅, 王绪晖, 王吉明, 赫崇君, 顾晓蓉, 刘友文 2018 物理学报 67 104208
Google Scholar
Wu T, Sun S S, Wang X H, Wang J M, He C J, Gu X R, Liu Y W 2018 Acta Phys. Sin. 67 104208
Google Scholar
[14] Choi W J, Park K S, Eom T J, Oh M K, Lee B H 2012 Opt. Lett. 37 2784
Google Scholar
[15] 梁艳梅, 周大川, 孟凡勇, 王明伟 2007 物理学报 56 3246
Google Scholar
Liang Y M, Zhou D C, Meng F Y, Wang M W 2007 Acta Phys. Sin. 56 3246
Google Scholar
[16] Leitgeb R, Hitzenberger C K, Fercher A F 2003 Opt. Express 11 889
Google Scholar
[17] Boer J F D, Cense B, Park B H, Pierce M C, Bouma B E 2003 Opt. Lett. 28 2067
Google Scholar
[18] Chong G T, Farsiu S, Freedman S F, Sarin N, Koreishi A F, Izatt J A, Toth C A 2009 Arch. Ophthalmol-Chic. 127 37
Google Scholar
[19] Yan Y, Ding Z, Shen Y, Chen Z, Zhao C, Ni Y 2013 Opt. Express 21 25734
Google Scholar
[20] Choma M, Sarunic M, Yang C, Izatt J 2003 Opt. Express 11 2183
Google Scholar
[21] Chang R T, Knight O J, Feuer W J, Budenz D L 2009 Ophthalmology 116 2294
Google Scholar
[22] Lei Y, Hui X, Chen J X 2018 Appl. Opt. 57 9789
Google Scholar
[23] Beaurepaire, C A, Boccara, Lebec, Blanchot, Saint-Jalmes 1998 Opt. Lett. 23 244
Google Scholar
[24] Hu Z, Rollins A M 2007 Opt. Lett. 32 3525
Google Scholar
[25] Edith Perret T E B, Heuberger M 2010 Appl. Spectrosc. 64 1139
Google Scholar
[26] Wojtkowski M, Leitgeb R, Kowalczyk A, Bajraszewski T, Fercher A F 2002 J. Biomed. Opt. 7 457
Google Scholar
[27] Rosa C C, Rogers J A, Podoleanu A 2005 Opt. Lett. 30 3263
Google Scholar
[28] Marks D L, Oldenburg A, Reynolds J J, Boppart S A 2002 Proceedings of the Proceedings IEEE International Symposium on Biomedical Imaging Washington DC, USA, July 7–10, 2002 p621
[29] Rivet S, Maria M, Bradu A, Feuchter T, Podoleanu A 2016 Opt. Express 24 2885
Google Scholar
[30] Bradu A, Israelsen N M, Maria M, Marques M J, Rivet S, Feuchter T, Bang O, Podoleanu A 2018 Sci. Rep. 8 15445
Google Scholar
[31] Podoleanu A, Bradu A, Marques M, Rivet S 2019 High-Speed Biomedical Imaging and Spectroscopy IV San Francisco, California, United States, March 4 , 2019 p1088908
[32] 唐弢, 赵晨, 陈志彦, 李鹏, 丁志华 2015 物理学报 64 174201
Google Scholar
Tang T, Zhao C, Chen Z Y, Li P, Ding Z H 2015 Acta Phys. Sin. 64 174201
Google Scholar

 下载:
下载:
计量
- 文章访问数: 6177
- PDF下载量: 79
- 被引次数: 0
