










-
基于外部光注入的光泵浦自旋垂直腔表面发射激光器(vertical cavity surface-emitting laser, VCSEL)的两个混沌偏振分量, 提出了对两个复杂形状目标中的多区域精确测距方案. 这里, 两个混沌偏振探测波具有飞秒量级快速动态并且被双极性sinc波形调制, 使它们具有时空不相关特性. 利用这些特性, 通过计算多束延时反馈混沌偏振探测波形和与之相对应的参考波形的相关性, 实现了对两个复杂形状目标多区域位置矢量精确测量. 研究结果表明, 对多区域小目标的测距具有非常低的相对误差(低于0.94%). 当光电探测器的带宽足够大时, 其测距的分辨率达到0.4 mm, 并具有很强的抗噪声能力. 本文的研究结果在复杂形状目标的精确测距方面具有潜在应用.
-
关键词:
- 光泵浦自旋垂直腔表面发射激光器 /
- 混沌偏振雷达 /
- 多区域目标测距
The ranging based on the chaotic lidar (CLR) generated by using the nonlinear dynamic of semiconductor with optical feedback or optical injection exhibits many advantages over the ranging using pulse lasers and CW lasers, such as low probability of intercept, strong anti-interference ability and low cost. Moreover, it has high resolution, benefiting from the broad bandwidth of the optical chaos. Finally, it is easily be generated and controlled due to the sensitivity of chaotic radar to laser parameters. The resolution of the correlated chaotic lidar (CLR) ranging which has been reported in many literatures is largely limited by the bandwidth of the chaotic laser. An ultra-fast chaotic laser with large modulation bandwidth is required to further improve the ranging resolution. The recently proposed optically pumped spin-VCSEL has attractive features such as flexible spin control of lasing output, fast dynamics with femtosecond magnitude and large modulation bandwidth. The ultra-fast chaos radar wave emitted from the optically pumped spin-VCSEL with optical injection or optical feedback is expected to be used for improving the resolution and accuracy of target ranging. In addition, since the multi beams of CLRs were utilized in the previous works, the number of ranging targets is limited to a small number of targets. The reported CLR ranging technology cannot completely detect the distance of different regions in the target, and it is not suitable for the accurate ranging of the whole area in the complex shape target. The detection waveform based on the correlation CLR has not been designed before the target ranging, which affects the further improvement of the resolution and accuracy of the target ranging. To overcome these problems, it is necessary to further explore the theoretical and physical mechanism of the CLR ranging for the multi-region in complex shape target, and explore the new scheme and method for its realization. Motivated by these, in this paper, based on the optically pumped spin vertical cavity surface emitting laser with optical injection, we present a novel scheme for the accurate ranging of the multi regions in two complex shape targets, using two chaotic polarization components modulated by the bipolar sinc waveform. Here, these two modulated chaotic polarization probe waveforms possess the attractive features of the uncorrelation in time and space, fast dynamic with femtosecond magnitude. Utilizing these features, the accurate ranging to the position vectors of the multi regions of two complex-shape targets can be achieved by correlating the multi beams of the time-delay reflected chaotic polarization probe waveforms with their corresponding reference waveforms. The further investigations show that the ranging to the multi-region small targets possesses the very low relative error that is less than 0.94%. If the bandwidths of the photodetectors are large enough, their range resolutions are achieved as high as 0.4 mm, and exhibit excellent strong anti-noise performance and strong stability. The multi area target ranging proposed in our scheme has the following attractive advantages: stable and high range resolution, strong anti-noise ability and very low relative error. These characteristics can meet the needs of the position vector ranging of the multi regions in complex shape targets. -
Keywords:
- optically pumped spin vertical cavity surface emitting laser /
- chaotic polarization radar /
- ranging to multi-region
[1] Brent S 2010 Nat. Photonics 4 429
 Google Scholar
Google Scholar
[2] Li Q, Chen L, Li M, Shaw S, Nüchter A 2014 IEEE Trans. Veh. Technol. 63 540
Google Scholar
[3] John M, Bradley T, Ryan I, Adriana R 2015 2015 IEEE Games Entertainment Media Conference (GEM) Toronto, Canada, October 14–16, 2015 p1
[4] 周彦平, 黎发军, 车驰, 谭立英, 冉启文, 于思源, 马晶 2014 物理学报 63 148501
Google Scholar
Zhou Y P, Li F J, Che C, Tan L J, Ran Q W, Yu S Y, Ma J 2014 Acta Phys. Sin. 63 148501
Google Scholar
[5] 高飞, 南恒帅, 黄波, 汪丽, 李仕春, 王玉峰, 刘晶晶, 闫庆, 宋跃辉, 华灯鑫 2018 物理学报 67 030701
Google Scholar
Gao F, Nan H S, Huang B, Wang L, Li S C, Wang Y F, Liu J J, Yan Q, Song Y H, Hua D X 2018 Acta Phys. Sin. 67 030701
Google Scholar
[6] Amann M C, Bosch T, Lescure M, Myllyla R, Rioux M 2001 Opt. Eng. 40 10
Google Scholar
[7] Koichi K 1998 US Patent US5724124 A
[8] Takeuchi N, Sugimoto N, Baba H, Sakurai K 1983 Appl. Opt. 22 1382
Google Scholar
[9] Immoreev I I, Fedotov P G S D V 2002 2002 IEEE Conference on Ultra Wideband Systems and Technologies (IEEE Cat. No.02 EX580) Baltimore, USA, May 21–23, 2002 p201
[10] Lin F Y, Liu J M 2004 IEEE J. Sel. Top. Quantum Electron. 10 991
Google Scholar
[11] Wu W T, Liao Y H, Lin F Y 2010 Opt. Express 18 26155
Google Scholar
[12] Cheng C H, Chen Y C, Lin F Y 2016 IEEE Photonics J. 8 7800209
Google Scholar
[13] Lin F Y, Liu J M 2004 IEEE J. Sel. Top. Quantum Electron. 40 815
Google Scholar
[14] Krishna M, Thomas B, Billy R, Shawn P, Ned C 2001 Appl. Phys. Lett. 78 1496
Google Scholar
[15] Lin F Y, Liu J M 2005 IEEE J. Sel. Top. Quantum Electron. 40 1732
Google Scholar
[16] Wang L S, Guo Y Y, Li P, Zhao T, Wang Y Z, Wang A B 2017 IEEE Photonics Technol. Lett. 29 1723
Google Scholar
[17] Wang B J, Wang Y C, K L Q, W A B 2008 Chin. Opt. Lett. 6 868
Google Scholar
[18] Zhang M J, Ji Y N, Zhang Y N, Wu Y, Xu H, Xu W P 2014 IEEE Photonics J. 6 1
Google Scholar
[19] Wang B J, Xu H, Yang P, Liu L, Li J X 2015 Entropy 4 2082
Google Scholar
[20] Xu H, Wang B J, Han H, Liu L, Li J X, Wang Y C, Wang A B 2015 Int. J. Bifurcation Chaos 25 1530029
Google Scholar
[21] Yao T, Zhu D, Ben D, Pan S 2015 Opt. Lett. 40 1631
Google Scholar
[22] Cheng C H, Chen C Y, Chen J D, Pan D K, Ting K T, Lin F Y 2018 Opt. Express 26 12230
Google Scholar
[23] Zhong D Z, Xu G L, Luo W, Xiao Z Z 2017 Opt. Express 25 21684
Google Scholar
[24] Zhong D Z, Xiao Z Z, Yang G Z, Zeng N, Yang H 2019 Opt. Express 27 9857
Google Scholar
[25] Zhong D Z, Xu G L, Luo W, Xiao Z Z 2017 Chin. Phys. B 26 261
[26] Gerhardt N C, Hofmann M R 2012 Adv. Opt. Technol 2012 61840Y
Google Scholar
[27] Wang B J, Zhao T, Wang H K 2012 Chin. Opt. Lett. 5 2801
Google Scholar
[28] Zhong D Z, Luo W, Xu G L, Xiao Z Z 2017 Opt. Express 25 21644
Google Scholar
[29] Li N Q, Susanto H, Cemlyn B, Henning I D, Adams M J 2017 Opt. Lett. 42 3494
Google Scholar
[30] Susanto H, Schires K, Adams M J, Henning I D 2015 Phys. Rev. A 92 2109
Google Scholar
[31] San M M, Feng Q, Moloney J V 1995 Phys. Rev. A 52 1728
Google Scholar
[32] Li N Q, Susanto H, Cemlyn B R, Henning I D, Adams M J 2017 Phys. Rev. A 96 013840
Google Scholar
[33] Li D Z, Liu X, Qin Y L, Cheng Y Q, Wang H Q 2004 IEEE Trans. Geosci. Remote Sens. 52 2261
Google Scholar
[34] 王冰洁 2012 博士学位论文 (太原: 太原理工大学)
Wang B J 2012 Ph. D. Dissertation (Taiyuan: Taiyuan University of Technology) (in Chinese)
-

图 1 基于外部光注入的光泵浦自旋VCSEL的两个混沌偏振波形对两个复杂形状目标中多个区域的精确测距方案. 这里, DFB: 分布式反馈激光器; OI: 光学隔离器; NDF: 中密度滤器; PCOC: 偏振控制光路; FP: 光纤偏振器; FPCO: 光纤偏振控制器; FD: 光纤消偏器; FPC: 光纤偏振耦合器; PD: 光电探测器; AM: 振幅调制器; Spin-VCSEL: 自旋VCSEL; FPBS: 光纤偏振分束器; FBS: 光纤分束器; EA: 电放大器; TA: 发射天线; RA: 接收天线; T1 和T2: 两个待测目标; CFCM: 相关函数计算模块; TRCM: 目标测距计算模块; x-PC: x偏振分量; y-PC: y偏振分量;
$ \eta $ : 泵浦光的归一化总泵浦功率Fig. 1. Schematic diagram of the precise ranging for the multi regions of two complex-shape targets by using two chaotic polarization radars in the optically pumped spin-VCSEL with optical injection. Here, DFB, distributed feedback laser; OI, optical isolator; NDF, neutral density filter; PCOC, polarization control optical circuit; FP, fiber polarizer; FPCO, fiber polarization controller; FD, fiber depolarizer; FPC, fiber polarization coupler; PD, photodetector; AM, amplitude modulator; Spin-VCSEL, spin vertical cavity surface emitting laser; FPBS, fiber polarization beam splitter; FBS, fiber beam splitter; EA, electric amplifier; TA, transmitting antenna; RA, receiving antenna; T1 and T2, two targets to be measured; CFCM, correlation function calculation module; TRCM, target ranging calculation module; x-PC, x polarization component; y-PC, y polarization component;
$ \eta $ , total normalized pump power.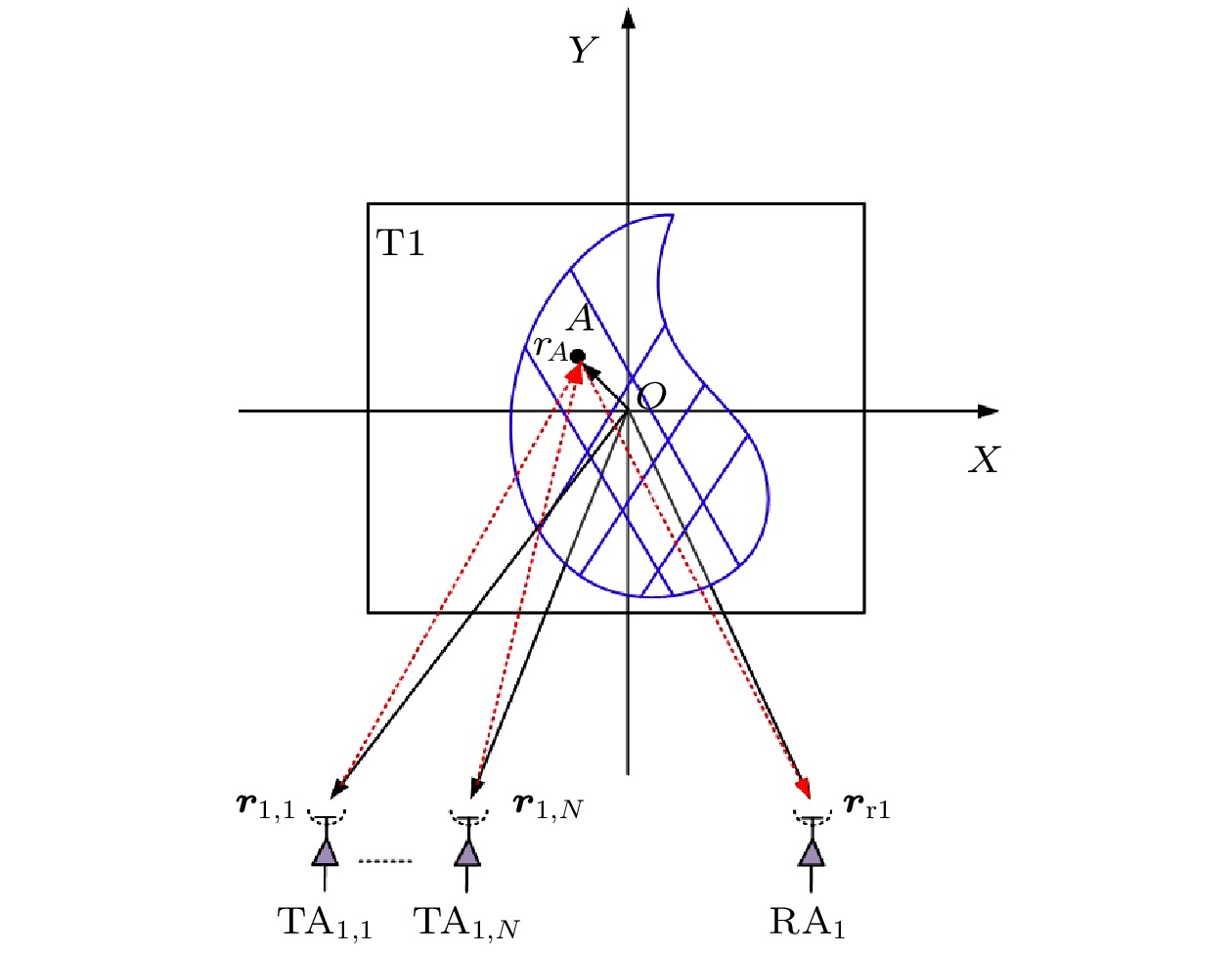
图 2 复杂形状目标T1中的任意小区域测距的几何图. 图中,
${{\mathit{\boldsymbol{r}}}}_{{{A}}}$ : A点的实际位置矢量;${{\mathit{\boldsymbol{r}}}}_{{1}, {1}}—{{\mathit{\boldsymbol{r}}}}_{{1}, {{{N}}}}$ : 发射天线TA1, 1—TA1, N的位置矢量;$ {{\mathit{\boldsymbol{r}}}}_{{{\rm r}}1}$ : 接收天线的位置矢量; 红色点线: 天线发射的雷达探测信号指向目标点A的方向, 以及由目标点A反射或散射的雷达探测信号指向接收雷 达RA1的方向Fig. 2. Geometry diagram of the ranging for arbitrary small area of the target T1. Here,
$ {{\mathit{\boldsymbol{r}}}}_{{{A}}} $ , the actual position vector of the point-A;$ {{\mathit{\boldsymbol{r}}}}_{{1}, {1}}–{{\mathit{\boldsymbol{r}}}}_{{1}, {{{N}}}} $ , the position vectors for the transmitting antennas TA1, 1–TA1, N ; Red dotted lines, the direction of the radar probe signals transmitted by the antennas toward the point-A, as well as the direction of the radar probe signals reflected or scattered by the point-A toward the receiving antenna RA1.
图 3 (a)用于调制第1束x偏振探测信号的sinc波形的时间轨迹; (b)用于调制第3束x偏振探测信号的sinc波形的时间轨迹; (c)第1束x偏探测信号(
$ s_{1 x_1} $ )的时间轨迹; (d)第3束x偏振探测信号($ s_{1 x_3} $ )的时间轨迹; (e)调制后的第1束x偏振雷达探测信号的时间轨迹; (f)调制后的第3束x偏振雷达探测信号的时间轨迹Fig. 3. (a) Temporal traces of the sinc waveform which are used to modulate the first beam of the x-polarization probe signal; (b) temporal traces of the sinc waveform which are used to the third beam of the x-polarization probe signal; (c) temporal traces of the first beam of the x-polarization probe signal (
$ s_{1 x_1} $ ); (d) temporal traces of the third beam of the x-polarization probe signal ($ s_{1 x_3} $ ); (e) temporal traces of the modulated first beam of the x-polarization probe signal; (f) temporal traces of the modulated third beam of the x-polarization probe signal.
图 4 (a)第5束x偏振雷达探测信号的时间自相关(
$ T_{{\rm P}x} $ ); (b)第5束x偏振雷达探测信号和数量为10束的x偏振雷达探测信号的空间互相关($R_{{\rm P}x}$ ), 变量j表示第j束x偏振雷达探测信号Fig. 4. (a) Time autocorrelation (
$T_{{\rm P}x}$ ) of the fifth beam of the x-polarization radar probe signal; (b) space autocorrelation ($ R_{{\rm P}x} $ ) between the fifth beam of the x-polarization radar probe signal and ten beams of ones. Variable j denotes the j th x-polarization radar probe signal.
图 5 (a)在10束x偏振雷达探测信号中, 两两之间的时空相关性(
$ C_{RT_1} $ ); (b)10束x偏振雷达探测信号与10束x偏振参考信号的时空相关性($ C_{RT_2} $ ); 这里, 变量j表示第j束x偏振雷达探测信号或第j束x偏振雷达参考信号Fig. 5. (a) Time-space correlation
$ C_{RT_1} $ among ten beams of the x-polarization radar probe signals; (b) Time-space correlation$ C_{RT_2} $ of ten beams of the x-polarization radar probe signals with ten beams of the x-polarization radar reference signal. Here, the variable j denotes the jth x-polarization radar probe signal or the jth x-polarization radar reference signal.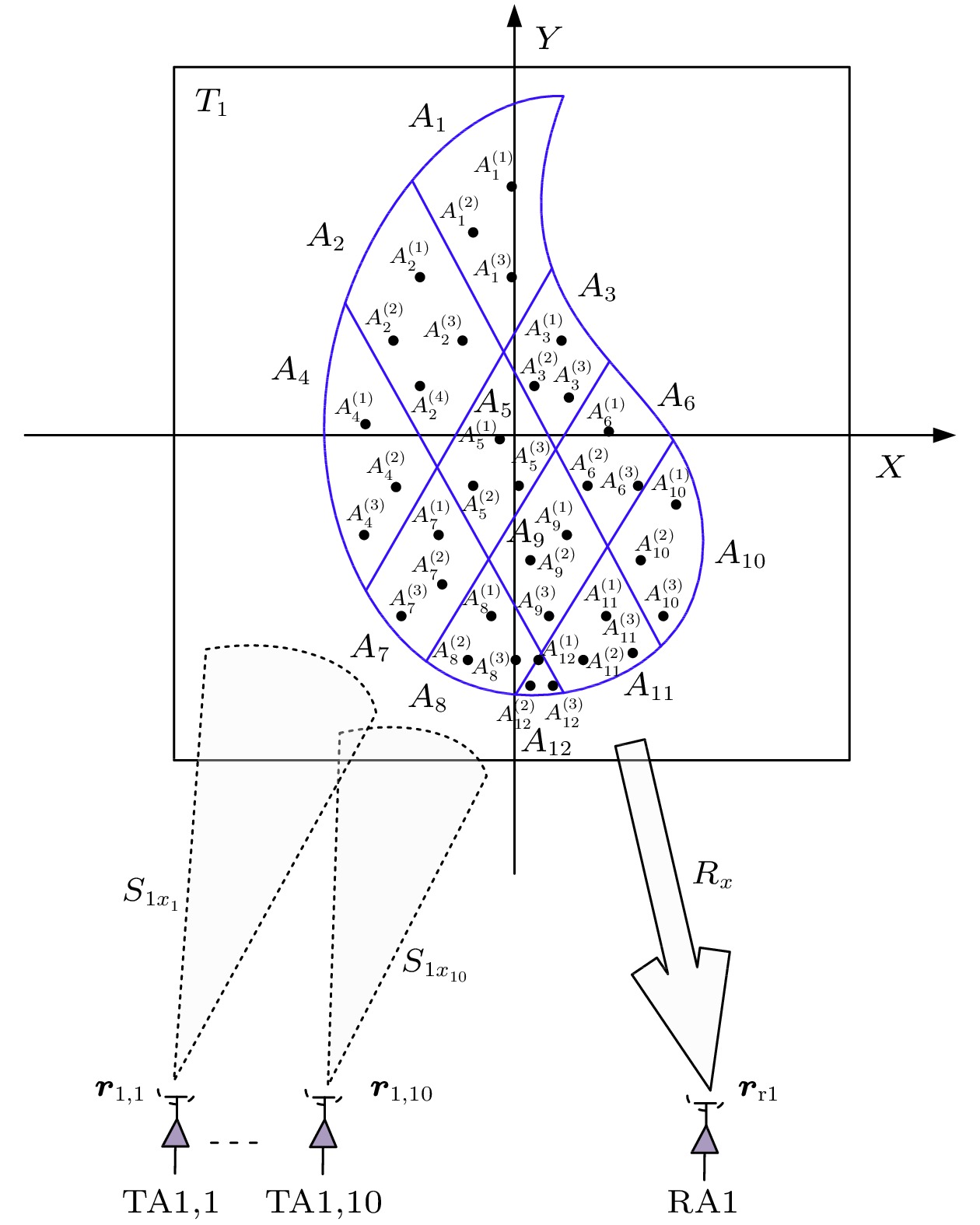
图 6 复杂形状目标T1中12个小区域目标测距的几何图. A1—A12: 12个小区域目标; TA1,1—TA1,10: 10个发射天线;
$ {{\mathit{\boldsymbol{r}}}}_{{1}, {1}}—{{\mathit{\boldsymbol{r}}}}_{{1}, {10}}$ : 发射天线(TA1,1—TA1,10)的位置矢量; RA1: 接收天线;$ S_{1 x_1}—S_{1 x_{10}} $ : 10束x偏振雷达探测信号; Rx: 接收的雷达探测信号Fig. 6. Geometry diagram of the ranging for twelve small areas in the complex-shape target T1. A1—A12, twelve small area targets; TA1,1—TA1,10, ten transmitting antennas;
$ {{\mathit{\boldsymbol{r}}}}_{{1}, {1}}—{{\mathit{\boldsymbol{r}}}}_{{1}, {10}} $ , position vectors for the transmitting antennas (TA1,1—TA1,10); RA1, receiving antenna;$ S_{1 x_1}—S_{1 x_{10}} $ , ten beams of the x-polarization radar probe signals; Rx, received radar probe signals.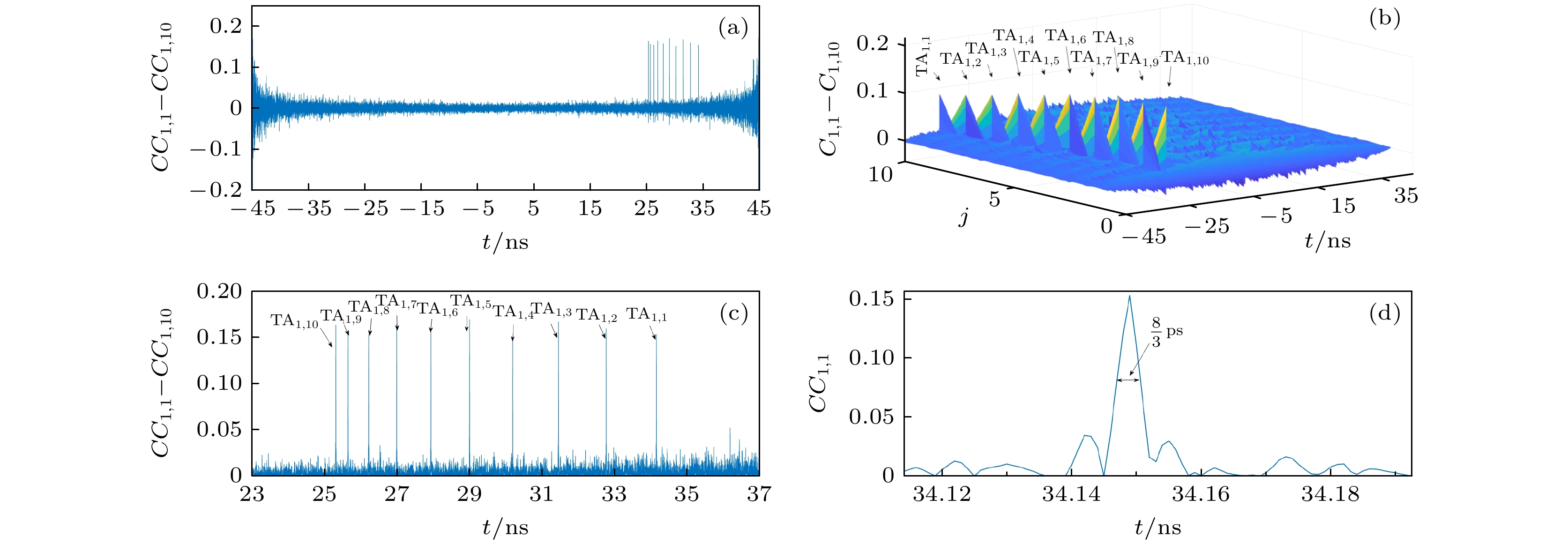
图 7 (a)针对目标点
$ A^{(1)}_2 $ , 从天线RA1接收的雷达探测信号与10束x偏振参考信号的时间互相关; (b)针对目标$ A^{(1)}_2 $ , 从接收天线RA1接收的雷达探测信号与10束x偏振参考信号的时空互相关; (c)图(a)的局部放大图; (d)针对目标点$ A^{(1)}_2 $ , 从天线RA1接收的雷达探测信号与第1束x偏振参考信号的互相关Fig. 7. (a) For the target point-
$ A^{(1)}_2 $ , the time autocorrelations of the radar probe signals received by the antenna RA1 with ten beams of the x-polarization radar probe signals; (b) for the target point-$ A^{(1)}_2 $ , the space autocorrelations of the radar probe signals received by the antenna RA1 with ten beams of the x-polarization radar probe signals; (c) local enlarged plot of panel (a); (d) for the target point-$ A^{(1)}_2 $ , the time autocorrelation of the radar probe signals received by the antenna RA1 with the first beam of the x-polarization radar probe signal.
图 8 目标点
$ A^{(1)}_2 $ 的测距分辨率(RR)对一些关键系统参数的依赖关系 (a) RR与注入强度$ k_{xinj} $ 的依赖关系; (b) RR与第一束x偏振雷达探测信号和目标点$ A^{(1)}_2 $ 之间的距离$ d_1 $ 的依赖关系; (c) RR与光电探测器(PD11和PD21)带宽$ \Delta f_1 $ 的依赖关系; (d) RR与sinc波形的振幅$ A_{\rm m} $ 的依赖关系; (e) RR与自发辐射噪声强度$ \beta $ 的依赖关系. 此外,$ k_{xinj} $ =$ k_{yinj} $ , 除上述讨论参数之外的其他参数值见表1Fig. 8. Dependences of the range resolutions (RR) for the target point-
$ A^{(1)}_2 $ on some key system parameters: (a) Dependence of the RR on the injection strength$ k_{xinj} $ ; (b) dependence of the RR on the distance between the first beam of the x-polarization radar probe signal and the target point-$ A^{(1)}_2 $ ; (c) dependence of the RR on the bandwidths$ \Delta f_1 $ of the photo detectors (PD11 and PD21); (d) dependence of the RR on the amplitude of sinc waveform; (e) dependence of the RR on the spontaneous emission noise intensity$ \beta $ . Moreover,$ k_{xinj} $ =$ k_{yinj} $ , values of other parameters are shown in Tab. 1.
图 9 测距相对误差RE与目标T1中任意目标点与第1束x偏振雷达探测信号源之间的距离d的依赖关系
Fig. 9. Dependence of the ranging relative error RE on the distance d between the arbitrary target point and the first beam of the x-polarization radar probe signal source.
表 1 用于计算的系统参数值
Table 1. Parameter values of the system for calculations
符号 参数 值 $ \alpha $ 线宽增益因子 4 $ \eta $ 总归一化泵浦功率 9 $ \kappa $ 场衰减率 300 p 泵浦极化椭圆率 1 $ \beta $ 自发耦合因子 $ 10^9 $ $ \gamma $ 电子密度衰减率 $1\; {\rm {ns}}^{-1} $ $\gamma_{\rm a}$ 线性二向色性 $10\; {\rm {ns}}^{-1} $ $\gamma_{\rm p}$ 线性双折射效应 $60\; {\rm {ns}}^{-1} $ $\gamma_{\rm s}$ 自旋弛豫率 $120\; {\rm {ns}}^{-1} $ $ k_{xinj} $ x-PC的光注入强度 $10\; {\rm {ns}}^{-1} $ $ k_{yinj} $ y-PC的光注入强度 $10\; {\rm {ns}}^{-1} $ $ \Delta \omega $ 频率失谐 30 × 109 rad/s  下载: 导出CSV
下载: 导出CSV
表 2 发射天线(TA1,1—TA1,10)的位置矢量
Table 2. Position vectors of the transmitting antennas (TA1,1—TA1,10)
${{\mathit{\boldsymbol{r}}}}_{{1}, {{{j}}}}$ 位置矢量 ${{\mathit{\boldsymbol{r}}}}_{{1}, {{{j}}}} $ 位置矢量 $ {{\mathit{\boldsymbol{r}}}}_{{1}, {1}} $ $-5 {{\mathit{\boldsymbol{e}}}}_{{x}} -3 {{\mathit{\boldsymbol{e}}}}_{{y}} $ $ {{\mathit{\boldsymbol{r}}}}_{{1}, {6}} $ $-2.5 {{\mathit{\boldsymbol{e}}}}_{{x}} -3{{\mathit{\boldsymbol{e}}}}_{{y}} $ $ {{\mathit{\boldsymbol{r}}}}_{{1}, {2}} $ $ -4.5 {{\mathit{\boldsymbol{e}}}}_{{x}} -3 {{\mathit{\boldsymbol{e}}}}_{{y}} $ $ {{\mathit{\boldsymbol{r}}}}_{{1}, {7}} $ $-2 {{\mathit{\boldsymbol{e}}}}_{{x}} -3 {{\mathit{\boldsymbol{e}}}}_{{y}} $ $ {{\mathit{\boldsymbol{r}}}}_{{1}, {3}} $ $-4 {{\mathit{\boldsymbol{e}}}}_{{x}} -3 {{\mathit{\boldsymbol{e}}}}_{{y}} $ $ {{\mathit{\boldsymbol{r}}}}_{{1}, {8}} $ $ -1.5{{\mathit{\boldsymbol{e}}}}_{{x}} -3 {{\mathit{\boldsymbol{e}}}}_{{y}} $ $ {{\mathit{\boldsymbol{r}}}}_{{1}, {4}} $ $-3.5 {{\mathit{\boldsymbol{e}}}}_{{x}} -3 {{\mathit{\boldsymbol{e}}}}_{{y}} $ $ {{\mathit{\boldsymbol{r}}}}_{{1}, {9}} $ $-1 {{\mathit{\boldsymbol{e}}}}_{{x}} -3 {{\mathit{\boldsymbol{e}}}}_{{y}} $ $ {{\mathit{\boldsymbol{r}}}}_{{1}, {5}} $ $-3 {{\mathit{\boldsymbol{e}}}}_{{x}} -3 {{\mathit{\boldsymbol{e}}}}_{{y}} $ $ {{\mathit{\boldsymbol{r}}}}_{{1}, {10}} $ $-0.5 {{\mathit{\boldsymbol{e}}}}_{{x}} -3 {{\mathit{\boldsymbol{e}}}}_{{y}} $
下载: 导出CSV
表 3 目标T1的每个小区域中3—4个目标点的实际位置矢量(
$ {{\mathit{\boldsymbol{d}}}}_{{{A}}^{(\iota)}_{j}} $ )和测量的位置矢量 ($ \overline{{{\mathit{\boldsymbol{r}}}}}_{{{A}}^{(\iota)}_{j}} $ )及它们的相对误差Table 3. Actual position vectors (
$ {{\mathit{\boldsymbol{d}}}}_{{{A}}^{(\iota)}_{j}} $ ) of 3–4 target points in each small area of target T1 and the measured position vectors ($ \overline{{{\mathit{\boldsymbol{r}}}}}_{{{A}}^{(\iota)}_{j}} $ ), as well as their relative errors.小区域$ A_{j} $ 目标点$ A^{(\iota)}_{j} $ $ {{\mathit{\boldsymbol{d}}}}_{{{A}}^{(\iota)}_{j}} $ $ \overline{{{\mathit{\boldsymbol{r}}}}}_{{{A}}^{(\iota)}_{j}} $ $ RE^{(\iota)}_{j} $ $ A_1 $ $ A^{(1)}_1 $ 0$ {{\mathit{\boldsymbol{e}}}}_{x}$ + 0.2$ {{\mathit{\boldsymbol{e}}}}_y$ –0.0001$ {{\mathit{\boldsymbol{e}}}}_{x}$ + 0.2$ {{\mathit{\boldsymbol{e}}}}_y $ 0.04% $ A^{(2)}_1 $ –0.05$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.17$ {{\mathit{\boldsymbol{e}}}}_y $ –0.0498$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.17$ {{\mathit{\boldsymbol{e}}}}_y $ 0.14% $ A^{(3)}_1 $ 0$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.15$ {{\mathit{\boldsymbol{e}}}}_y $ –0.0002$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.15$ {{\mathit{\boldsymbol{e}}}}_y $ 0.13% $ A_2 $ $ A^{(1)}_2 $ –0.1$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.15$ {{\mathit{\boldsymbol{e}}}}_y $ –0.0999$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.15$ {{\mathit{\boldsymbol{e}}}}_y $ 0.07% $ A^{(2)}_2 $ –0.12$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.1$ {{\mathit{\boldsymbol{e}}}}_y $ –0.1199$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.1$ {{\mathit{\boldsymbol{e}}}}_y $ 0.05% $ A^{(3)}_2 $ –0.05$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.1$ {{\mathit{\boldsymbol{e}}}}_y $ –0.0499$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.1001$ {{\mathit{\boldsymbol{e}}}}_y $ 0.09% $ A^{(4)}_2 $ –0.1$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.03$ {{\mathit{\boldsymbol{e}}}}_y $ –0.1002$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.03$ {{\mathit{\boldsymbol{e}}}}_y $ 0.19% $ A_3 $ $ A^{(1)}_3 $ 0.05$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.1$ {{\mathit{\boldsymbol{e}}}}_y $ 0.0501$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.1$ {{\mathit{\boldsymbol{e}}}}_y $ 0.06% $ A^{(2)}_3 $ 0.02$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.03$ {{\mathit{\boldsymbol{e}}}}_y $ 0.0197$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.03$ {{\mathit{\boldsymbol{e}}}}_y $ 0.88% $ A^{(3)}_3 $ 0.06$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.02$ {{\mathit{\boldsymbol{e}}}}_y $ 0.0597$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0.02$ {{\mathit{\boldsymbol{e}}}}_y $ 0.49% $ A_4 $ $ A^{(1)}_4 $ –0.16$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.01$ {{\mathit{\boldsymbol{e}}}}_y $ –0.1599$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.01$ {{\mathit{\boldsymbol{e}}}}_y $ 0.08% $ A^{(2)}_4 $ –0.12$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.05$ {{\mathit{\boldsymbol{e}}}}_y $ –0.1197$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.05$ {{\mathit{\boldsymbol{e}}}}_y $ 0.21% $ A^{(3)}_4 $ –0.16$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.1$ {{\mathit{\boldsymbol{e}}}}_y $ –0.1602$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.1$ {{\mathit{\boldsymbol{e}}}}_y $ 0.11% $ A_5 $ $ A^{(1)}_5 $ –0.02$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0$ {{\mathit{\boldsymbol{e}}}}_y $ –0.0198$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0$ {{\mathit{\boldsymbol{e}}}}_y $ 0.94% $ A^{(2)}_5 $ –0.05$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.05$ {{\mathit{\boldsymbol{e}}}}_y $ –0.05$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.05$ {{\mathit{\boldsymbol{e}}}}_y $ 0 $ A^{(3)}_5 $ 0$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.05$ {{\mathit{\boldsymbol{e}}}}_y $ 0.0001$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.05$ {{\mathit{\boldsymbol{e}}}}_y $ 0.19% $ A_6 $ $ A^{(1)}_6 $ 0.1$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0$ {{\mathit{\boldsymbol{e}}}}_y $ 0.1003$ {{\mathit{\boldsymbol{e}}}}_{x} $ + 0$ {{\mathit{\boldsymbol{e}}}}_y $ 0.31% $ A^{(2)}_6 $ 0.08$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.05$ {{\mathit{\boldsymbol{e}}}}_y $ 0.0796$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.05$ {{\mathit{\boldsymbol{e}}}}_y $ 0.4% $ A^{(3)}_6 $ 0.13$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.05$ {{\mathit{\boldsymbol{e}}}}_y $ 0.1301$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.0$ {{\mathit{\boldsymbol{e}}}}_y $ 0.05% $ A_7 $ $ A^{(1)}_7 $ –0.08$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.1$ {{\mathit{\boldsymbol{e}}}}_y $ –0.0803$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.1$ {{\mathit{\boldsymbol{e}}}}_y $ 0.4% $ A^{(2)}_7 $ –0.07$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.12$ {{\mathit{\boldsymbol{e}}}}_y $ –0.0705$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.12$ {{\mathit{\boldsymbol{e}}}}_y $ 0.38% $ A^{(3)}_7 $ –0.12$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.15$ {{\mathit{\boldsymbol{e}}}}_y $ –0.1204$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.15$ {{\mathit{\boldsymbol{e}}}}_y $ 0.21% $ A_8 $ $ A^{(1)}_8 $ –0.03$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.15$ {{\mathit{\boldsymbol{e}}}}_y $ –0.0299$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.15$ {{\mathit{\boldsymbol{e}}}}_y $ 0.05% $ A^{(2)}_8 $ –0.07$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.2$ {{\mathit{\boldsymbol{e}}}}_y $ –0.07$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.2$ {{\mathit{\boldsymbol{e}}}}_y $ 0 $ A^{(3)}_8 $ 0$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.2$ {{\mathit{\boldsymbol{e}}}}_y $ 0.0001$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.2$ {{\mathit{\boldsymbol{e}}}}_y $ 0.04% $ A_9 $ $ A^{(1)}_9 $ 0.06$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.1$ {{\mathit{\boldsymbol{e}}}}_y $ 0.0599$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.1$ {{\mathit{\boldsymbol{e}}}}_y $ 0.08% $ A^{(2)}_9 $ 0.02$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.12$ {{\mathit{\boldsymbol{e}}}}_y $ 0.0203$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.12$ {{\mathit{\boldsymbol{e}}}}_y $ 0.24% $ A^{(3)}_9 $ 0.04$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.15$ {{\mathit{\boldsymbol{e}}}}_y $ 0.0401$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.15$ {{\mathit{\boldsymbol{e}}}}_y $ 0.02% $ A_{10} $ $ A^{(1)}_{10} $ 0.18$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.07$ {{\mathit{\boldsymbol{e}}}}_y $ 0.18$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.0701$ {{\mathit{\boldsymbol{e}}}}_y $ 0.02% $ A^{(2)}_{10} $ 0.13$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.12$ {{\mathit{\boldsymbol{e}}}}_y $ 0.1297$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.12$ {{\mathit{\boldsymbol{e}}}}_y $ 0.18% $ A^{(3)}_{10} $ 0.15$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.15$ {{\mathit{\boldsymbol{e}}}}_y $ 0.1501$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.15$ {{\mathit{\boldsymbol{e}}}}_y $ 0.07% $ A_{11} $ $ A^{(1)}_{11} $ 0.0 $ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.15$ {{\mathit{\boldsymbol{e}}}}_y $ 0.0898$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.15$ {{\mathit{\boldsymbol{e}}}}_y $ 0.12% $ A^{(2)}_{11} $ 0.06$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.2$ {{\mathit{\boldsymbol{e}}}}_y $ 0.0598$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.25$ {{\mathit{\boldsymbol{e}}}}_y $ 0.07% $ A^{(3)}_{11} $ 0.13$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.19$ {{\mathit{\boldsymbol{e}}}}_y $ 0.1302$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.19$ {{\mathit{\boldsymbol{e}}}}_y $ 0.09% $ A_{12} $ $ A^{(1)}_{12} $ 0.02$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.2$ {{\mathit{\boldsymbol{e}}}}_y $ 0.0197$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.2$ {{\mathit{\boldsymbol{e}}}}_y $ 0.15% $ A^{(2)}_{12} $ 0.03$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.22$ {{\mathit{\boldsymbol{e}}}}_y $ 0.0297$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.22$ {{\mathit{\boldsymbol{e}}}}_y $ 0.16% $ A^{(3)}_{12} $ 0.05$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.22$ {{\mathit{\boldsymbol{e}}}}_y $ 0.0501$ {{\mathit{\boldsymbol{e}}}}_{x} $ – 0.22$ {{\mathit{\boldsymbol{e}}}}_y $ 0.02%
下载: 导出CSV
-
[1] Brent S 2010 Nat. Photonics 4 429
Google Scholar
[2] Li Q, Chen L, Li M, Shaw S, Nüchter A 2014 IEEE Trans. Veh. Technol. 63 540
Google Scholar
[3] John M, Bradley T, Ryan I, Adriana R 2015 2015 IEEE Games Entertainment Media Conference (GEM) Toronto, Canada, October 14–16, 2015 p1
[4] 周彦平, 黎发军, 车驰, 谭立英, 冉启文, 于思源, 马晶 2014 物理学报 63 148501
Google Scholar
Zhou Y P, Li F J, Che C, Tan L J, Ran Q W, Yu S Y, Ma J 2014 Acta Phys. Sin. 63 148501
Google Scholar
[5] 高飞, 南恒帅, 黄波, 汪丽, 李仕春, 王玉峰, 刘晶晶, 闫庆, 宋跃辉, 华灯鑫 2018 物理学报 67 030701
Google Scholar
Gao F, Nan H S, Huang B, Wang L, Li S C, Wang Y F, Liu J J, Yan Q, Song Y H, Hua D X 2018 Acta Phys. Sin. 67 030701
Google Scholar
[6] Amann M C, Bosch T, Lescure M, Myllyla R, Rioux M 2001 Opt. Eng. 40 10
Google Scholar
[7] Koichi K 1998 US Patent US5724124 A
[8] Takeuchi N, Sugimoto N, Baba H, Sakurai K 1983 Appl. Opt. 22 1382
Google Scholar
[9] Immoreev I I, Fedotov P G S D V 2002 2002 IEEE Conference on Ultra Wideband Systems and Technologies (IEEE Cat. No.02 EX580) Baltimore, USA, May 21–23, 2002 p201
[10] Lin F Y, Liu J M 2004 IEEE J. Sel. Top. Quantum Electron. 10 991
Google Scholar
[11] Wu W T, Liao Y H, Lin F Y 2010 Opt. Express 18 26155
Google Scholar
[12] Cheng C H, Chen Y C, Lin F Y 2016 IEEE Photonics J. 8 7800209
Google Scholar
[13] Lin F Y, Liu J M 2004 IEEE J. Sel. Top. Quantum Electron. 40 815
Google Scholar
[14] Krishna M, Thomas B, Billy R, Shawn P, Ned C 2001 Appl. Phys. Lett. 78 1496
Google Scholar
[15] Lin F Y, Liu J M 2005 IEEE J. Sel. Top. Quantum Electron. 40 1732
Google Scholar
[16] Wang L S, Guo Y Y, Li P, Zhao T, Wang Y Z, Wang A B 2017 IEEE Photonics Technol. Lett. 29 1723
Google Scholar
[17] Wang B J, Wang Y C, K L Q, W A B 2008 Chin. Opt. Lett. 6 868
Google Scholar
[18] Zhang M J, Ji Y N, Zhang Y N, Wu Y, Xu H, Xu W P 2014 IEEE Photonics J. 6 1
Google Scholar
[19] Wang B J, Xu H, Yang P, Liu L, Li J X 2015 Entropy 4 2082
Google Scholar
[20] Xu H, Wang B J, Han H, Liu L, Li J X, Wang Y C, Wang A B 2015 Int. J. Bifurcation Chaos 25 1530029
Google Scholar
[21] Yao T, Zhu D, Ben D, Pan S 2015 Opt. Lett. 40 1631
Google Scholar
[22] Cheng C H, Chen C Y, Chen J D, Pan D K, Ting K T, Lin F Y 2018 Opt. Express 26 12230
Google Scholar
[23] Zhong D Z, Xu G L, Luo W, Xiao Z Z 2017 Opt. Express 25 21684
Google Scholar
[24] Zhong D Z, Xiao Z Z, Yang G Z, Zeng N, Yang H 2019 Opt. Express 27 9857
Google Scholar
[25] Zhong D Z, Xu G L, Luo W, Xiao Z Z 2017 Chin. Phys. B 26 261
[26] Gerhardt N C, Hofmann M R 2012 Adv. Opt. Technol 2012 61840Y
Google Scholar
[27] Wang B J, Zhao T, Wang H K 2012 Chin. Opt. Lett. 5 2801
Google Scholar
[28] Zhong D Z, Luo W, Xu G L, Xiao Z Z 2017 Opt. Express 25 21644
Google Scholar
[29] Li N Q, Susanto H, Cemlyn B, Henning I D, Adams M J 2017 Opt. Lett. 42 3494
Google Scholar
[30] Susanto H, Schires K, Adams M J, Henning I D 2015 Phys. Rev. A 92 2109
Google Scholar
[31] San M M, Feng Q, Moloney J V 1995 Phys. Rev. A 52 1728
Google Scholar
[32] Li N Q, Susanto H, Cemlyn B R, Henning I D, Adams M J 2017 Phys. Rev. A 96 013840
Google Scholar
[33] Li D Z, Liu X, Qin Y L, Cheng Y Q, Wang H Q 2004 IEEE Trans. Geosci. Remote Sens. 52 2261
Google Scholar
[34] 王冰洁 2012 博士学位论文 (太原: 太原理工大学)
Wang B J 2012 Ph. D. Dissertation (Taiyuan: Taiyuan University of Technology) (in Chinese)



 下载:
下载:















































计量
- 文章访问数: 7799
- PDF下载量: 118
- 被引次数: 0
