










-
本文研究了三角翼迎风面边界层中的非定常横流不稳定性. 实验在马赫6低噪声风洞中进行, 模型为平板构型, 攻角为5°和10°. 通过温敏漆技术, 观察到在远离头部的区域, 边界层转捩阵面光滑且平行于前缘, 通过Kulite高频脉动压力传感器得到的功率谱密度曲线中有明显的f ≈ 10 kHz的扰动波信号峰值. 利用基于纳米示踪的平面激光散射技术, 在平行前缘方向对此区域进行流场可视化, 观察到规则的向下游卷起的涡结构, 形态与数值模拟中的横流涡形态一致, 且涡结构的位置不是固定的, 因此该10 kHz的信号为非定常横流波信号. 只有在边界层为层流时, 才能够观察到明显的10 kHz左右的非定常横流波信号峰值, 边界层转捩中或转捩后, 脉动压力的功率谱密度曲线为低频成分占主导的宽频分布. 提高单位雷诺数, 同一压力测点位置得到的横流波幅值先增长至饱和而后衰减. 增大攻角时, 横流行波幅值增长更加迅速, 在较低的雷诺数下就可以增长至饱和. 另外, 还利用Kulite传感器阵列测量了横流波的相速度和传播角度, 文中所测状态下, 相速度分布在0.24—0.32倍来流速度之间, 传播角度与来流方向夹角在40°—60°之间. 并且, 增大攻角时, 横流波的相速度变大, 传播角减小.In this paper, the traveling crossflow instability in the boundary layer on the windward side of a delta wing is studied. The experiments are carried out in a Mach 6 low-noise wind tunnel, with the angles of attack of the model being 5° and 10°, and the Reynolds number being in a range of 2.43 × 106–14.21 × 106 m–1. The wall fluctuation pressure is measured by fast-response Kulite pressure transducers. The power spectrum density (PSD) analysis is conducted to obtain the disturbance waves' development process in the boundary layer. The temperature-sensitive paints (TSPs) and nano-tracer based planar laser scattering (NPLS) technique are also used. From the TSP results, the boundary layer transition near the leading edge of the delta wing is smooth and parallel to the leading edge. A peak around 10 kHz in power spectrum density is detected by the fast-response pressure sensor, which may be caused by the traveling crossflow waves. To verify this dominant mode, an NPLS image in the plane of n = 36 mm is obtained. The shapes of vortex structures correspond to the shapes of the crossflow vortices from the numerical simulation. Only when the boundary layer is laminar can the traveling crossflow wave signal be observed from the PSD curves. When the boundary layer is at a transitional or turbulent phase, the low-frequency component is dominant in the PSD curve. With the increase of Reynolds number, the characteristic frequency of the crossflow wave increases, and the wave’s amplitude first increases and then decreases. Moreover, the angle of attack effect is obtained. The increasing of the angle of attack can make the traveling crossflow wave grow faster and saturate, attenuate at the position closer to the leading edge of the delta wing or at a lower Reynolds number. By sensor pairs composed of three Kulite transducers, the phase velocity and the propagation angle of the traveling crossflow wave are investigated. The dimensionless phase velocities of the traveling wave are in ranges of 0.24–0.26 and 0.26–0.32 at 5° and 10° angles of attack, respectively. The propagation angles are at 50°–60° and 40°–55° at the angles of attack of 5° and 10°, respectively. At a larger angle of attack, the traveling wave’s propagation angel is smaller, but the phase velocity is bigger. It may be because the spanwise pressure gradient is higher at a larger angle of attack, and then the crossflow velocity is stronger.
-
Keywords:
- crossflow instability /
- hypersonic flow /
- delta wing /
- power spectrum density
[1] Schneider S P 2004 Prog. Aerosp. Sci. 40 1
 Google Scholar
Google Scholar
[2] Mack L M 1975 AIAA J. 13 278
Google Scholar
[3] Saric W S, Reed H L, White E B 2003 Annu. Rev. Fluid Mech. 35 413
Google Scholar
[4] Deyhle H, Bippes H 1996 J. Fluid Mech. 316 73
Google Scholar
[5] Poll D I A 1985 J. Fluid Mech. 150 329
Google Scholar
[6] Malik M R, Li F, Choudhari M, Chang C L 1999 J. Fluid Mech. 399 85
Google Scholar
[7] Edelman J B, Schneider S P 2018 AIAA J. 56 182
Google Scholar
[8] Craig S A, Saric W S 2016 J. Fluid Mech. 808 224
Google Scholar
[9] Corke T, Arndt A, Matlis E, Semper M 2018 J. Fluid Mech. 856 822
Google Scholar
[10] Arndt A, Corke T, Matlis E, Semper M 2020 J. Fluid Mech. 887 A30
Google Scholar
[11] Moyes A J, Paredes P, Kocian T S, Reed H L 2017 J. Fluid Mech. 812 370
Google Scholar
[12] Xu G, Chen J, Liu G, Dong S, Fu S 2019 J. Fluid Mech. 873 914
Google Scholar
[13] Ward C A C 2014 Ph. D. Dissertation (Indiana: Pudue University)
[14] Borg M P, Kimmel R L, Stanfield S 2013 43rd Fluid Dynamics Conference San Diego, CA, June 24−27, 2013 p2737
[15] Borg M P, Kimmel R L, Stanfield S 2015 J. Spacecraft Rockets 52 664
Google Scholar
[16] Li F, Choudhari M, Chang C L, White J 2010 10th AIAA/ASME Joint Thermophysics and Heat Transfer Conference Chicago, Illinois, June 28−July 1, 2010 p4643
[17] Niu H B, Yi S H, Liu X L, Lu X G, He L 2019 AIAA J. 57 5566
Google Scholar
[18] 刘小林, 易仕和, 牛海波, 陆小革, 赵鑫海 2018 物理学报 67 174701
Google Scholar
Liu X L, Yi S H, Niu H B, Lu X G, Zhao X H 2018 Acta Phys. Sin. 67 174701
Google Scholar
[19] 刘小林, 易仕和, 牛海波, 陆小革 2018 物理学报 67 214701
Google Scholar
Liu X L, Yi S H, Niu H B, Lu X G 2018 Acta Phys. Sin. 67 214701
Google Scholar
[20] Niu H, Yi S, Liu X, Lu X, Gang D 2020 Chin. J. Aeronaut. 33 1889
Google Scholar
[21] Niu H, Yi S, Liu X, Huo J, Jin L 2020 Int. J. Heat Fluid Flow 86 108746
Google Scholar
[22] Lu X, Yi S, He L, Liu X, Niu H 2020 Fluid Dyn. 55 111
Google Scholar
[23] Cook W J, Felderman E J 1970 AIAA J. 8 1366
Google Scholar
[24] Zhao Y X, Yi S H, Tian L F, He L, Cheng Z Y 2009 Sci. China 52 3640
Google Scholar
[25] He L, Yi S H, Zhao Y X, Tian L F, Chen Z 2011 Chin. Sci. Bull. 56 489
Google Scholar
[26] Liu X L, Yi S H, Xu X W, Shi Y, Ouyang T C, Xiong H 2019 Phys. Fluids 31 074108
Google Scholar
[27] 陆昌根, 朱晓清, 沈露予 2017 物理学报 66 204702
Google Scholar
Lu C G, Zhu X Q, Shen L Y 2017 Acta Phys. Sin. 66 204702
Google Scholar
[28] 沈露予陆昌根 2017 物理学报 66 014703
Google Scholar
Shen L Y, Lu C G 2017 Acta Phys. Sin. 66 014703
Google Scholar
[29] Tian L, Yi S, Zhao Y, He L, Cheng Z 2009 Sci. China, Ser. G 52 1357
Google Scholar
[30] 赵磊 2016 博士学位论文 (天津: 天津大学)
Zhao L 2016 Ph. D. Dissertation (Tianjin: Tianjin University) (in Chinese)
[31] Poggie J, Kimmel R L, Schwoerke S N 2000 AIAA J. 38 251
Google Scholar
-
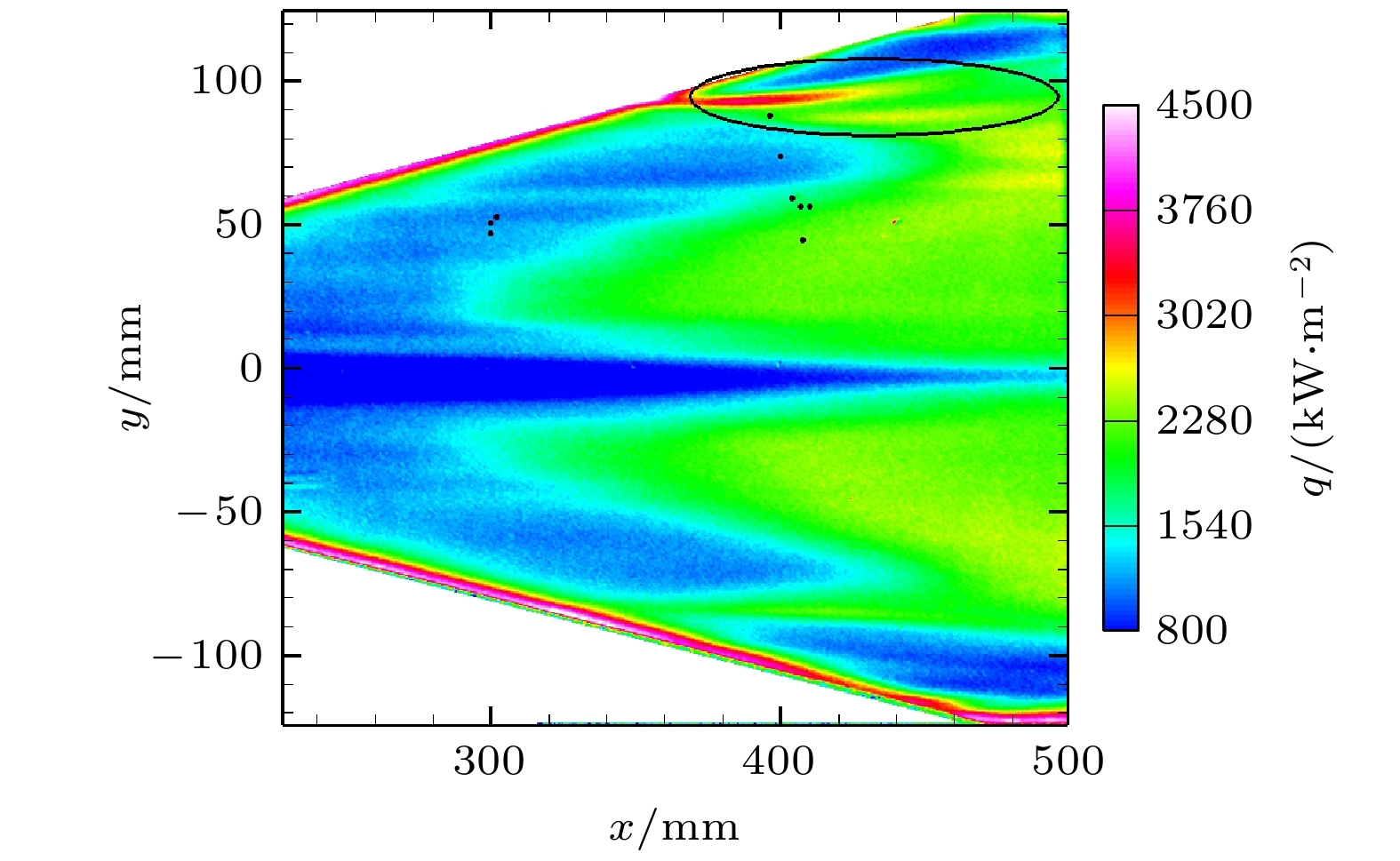
图 2 三角翼迎风面热流云图(Re∞ = 4.83 × 106 m–1, α = 5°)
Fig. 2. Heat flux contour on the windward (Re∞ = 4.83 × 106 m–1, α = 5°).
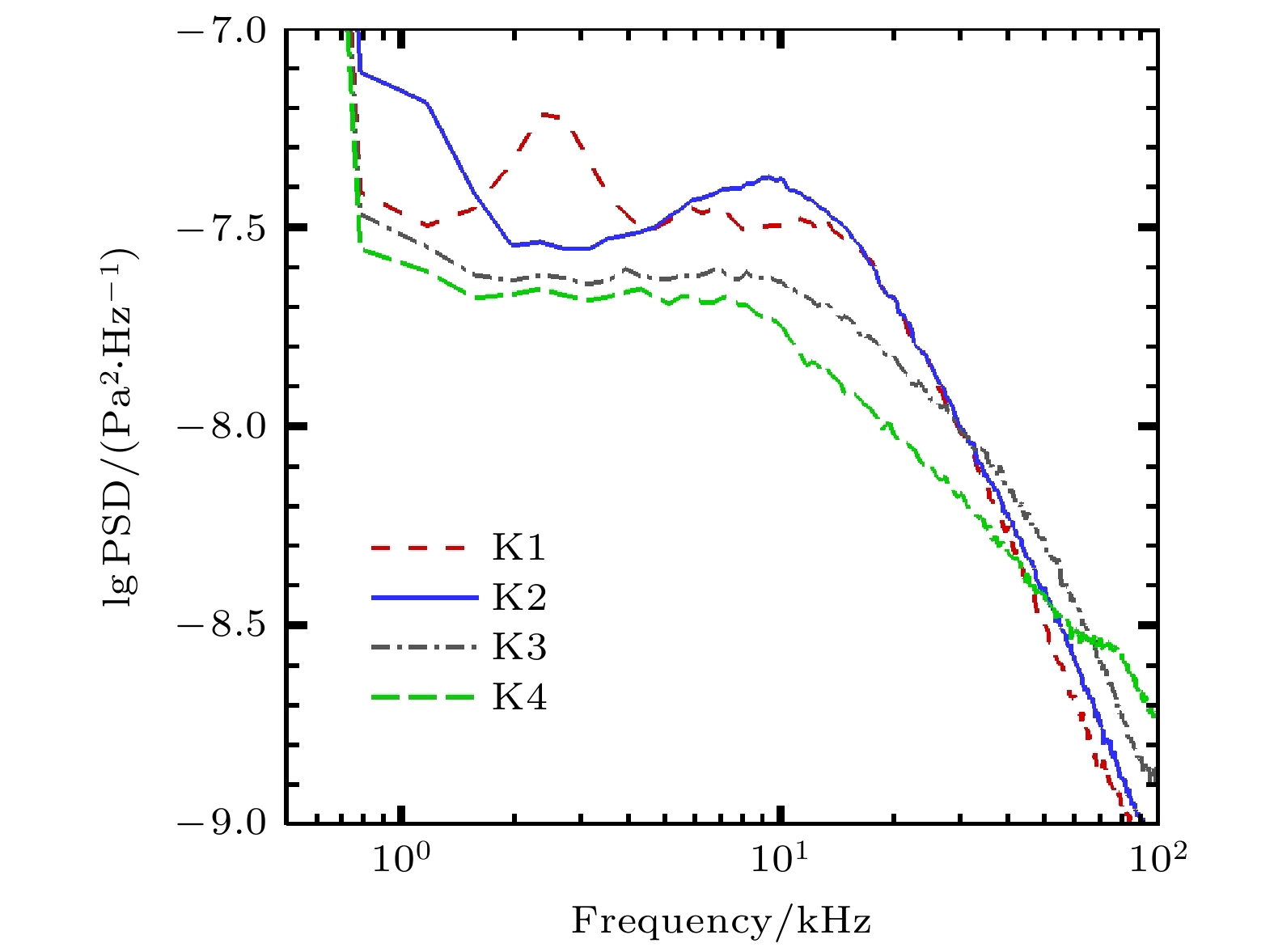
图 3 K1—K4测点的功率谱密度结果(Re∞ = 3.51 × 106 m–1, α = 5°)
Fig. 3. PSD results from sensors K1—K4 (Re∞ = 3.51 × 106 m–1, α = 5°).
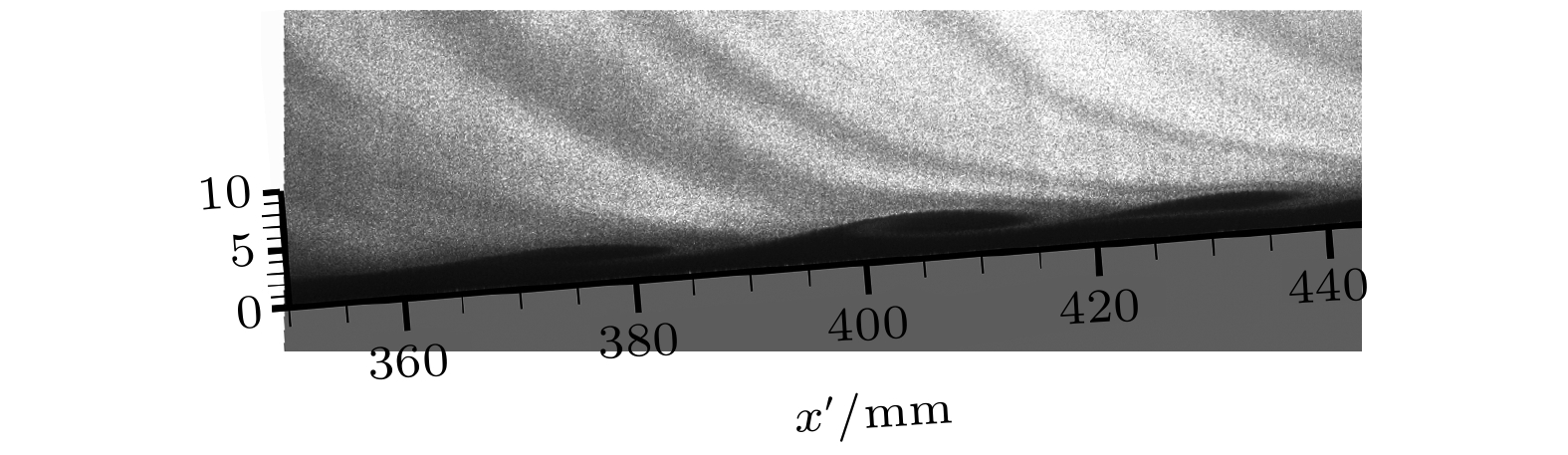
图 4 三角翼迎风面平行于前缘方向的NPLS图片 (Re∞ = 4.83 × 106 m–1, α = 5°, n = 36 mm)
Fig. 4. NPLS image on the plane parallel to the leading edge (Re∞ = 4.83 × 106 m–1, α = 5°, n = 36 mm).
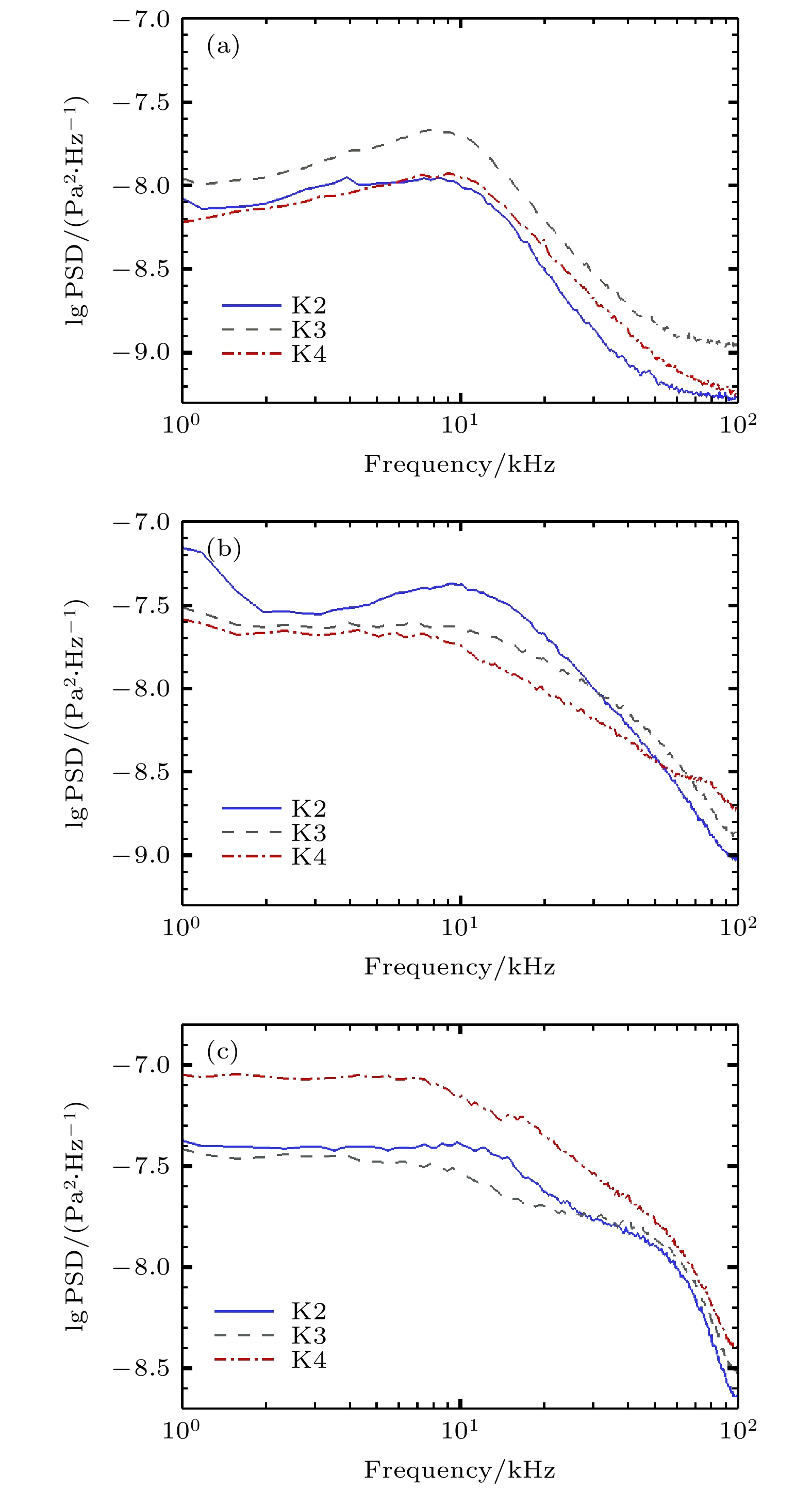
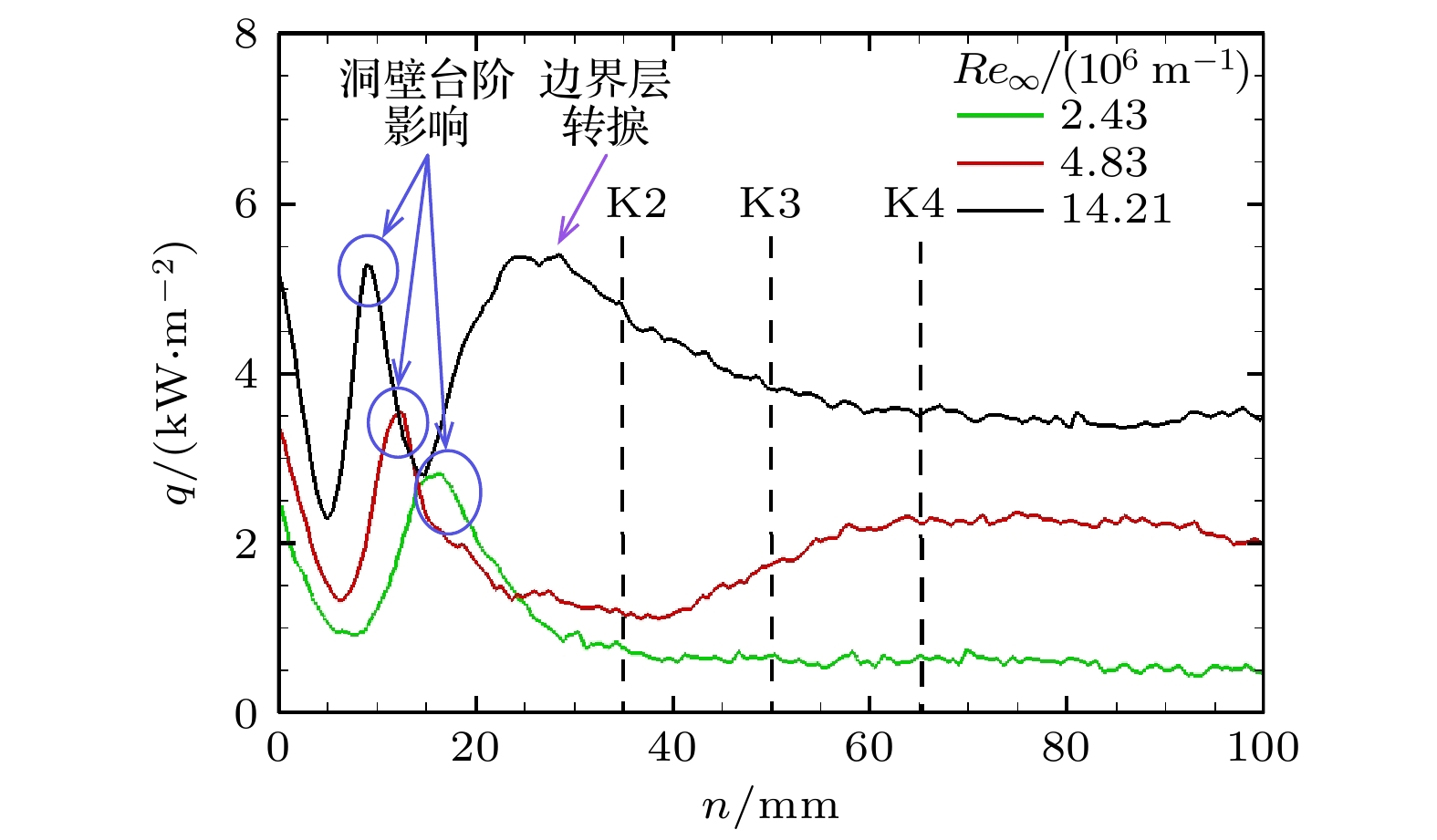
图 5 三角翼5°攻角迎风面K2-K4所测脉动压力的PSD结果 (a) 2.43 × 106 m–1; (b) 4.83 × 106 m–1; (c) 14.21 × 106 m–1
Fig. 5. PSD results of sensors K2-K4 on the windward side at α = 5°: (a) 2.43 × 106 m–1; (b) 4.83 × 106 m–1; (c) 14.21 × 106 m–1.
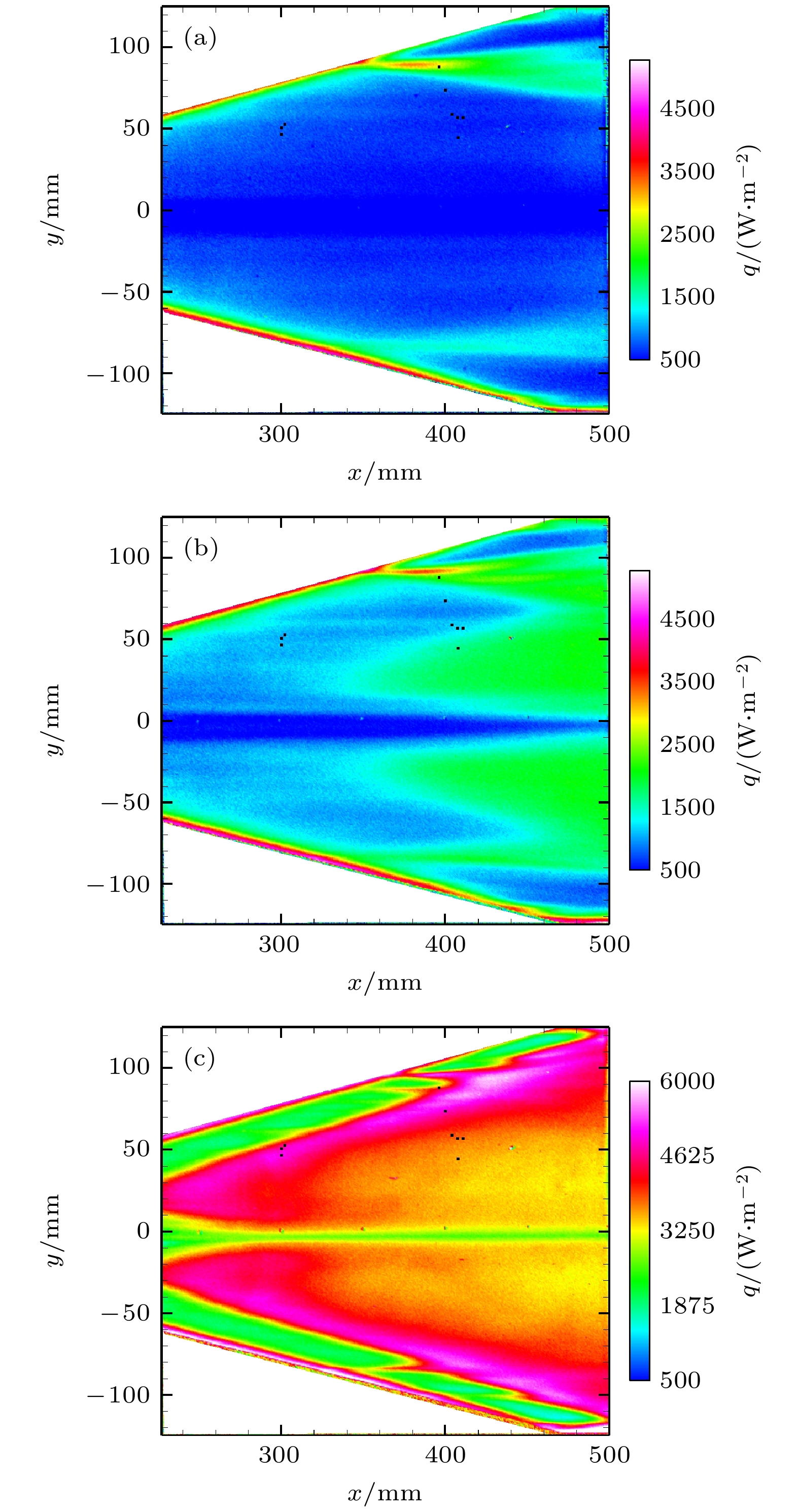
图 6 三角翼5°攻角迎风面TSP结果 (a) 2.43 × 106 m–1; (b) 4.83 × 106 m–1; (c) 14.21 × 106 m–1
Fig. 6. TSP results on the windward side at α = 5°: (a) 2.43 × 106 m–1; (b) 4.83 × 106 m–1; (c) 14.21 × 106 m–1.
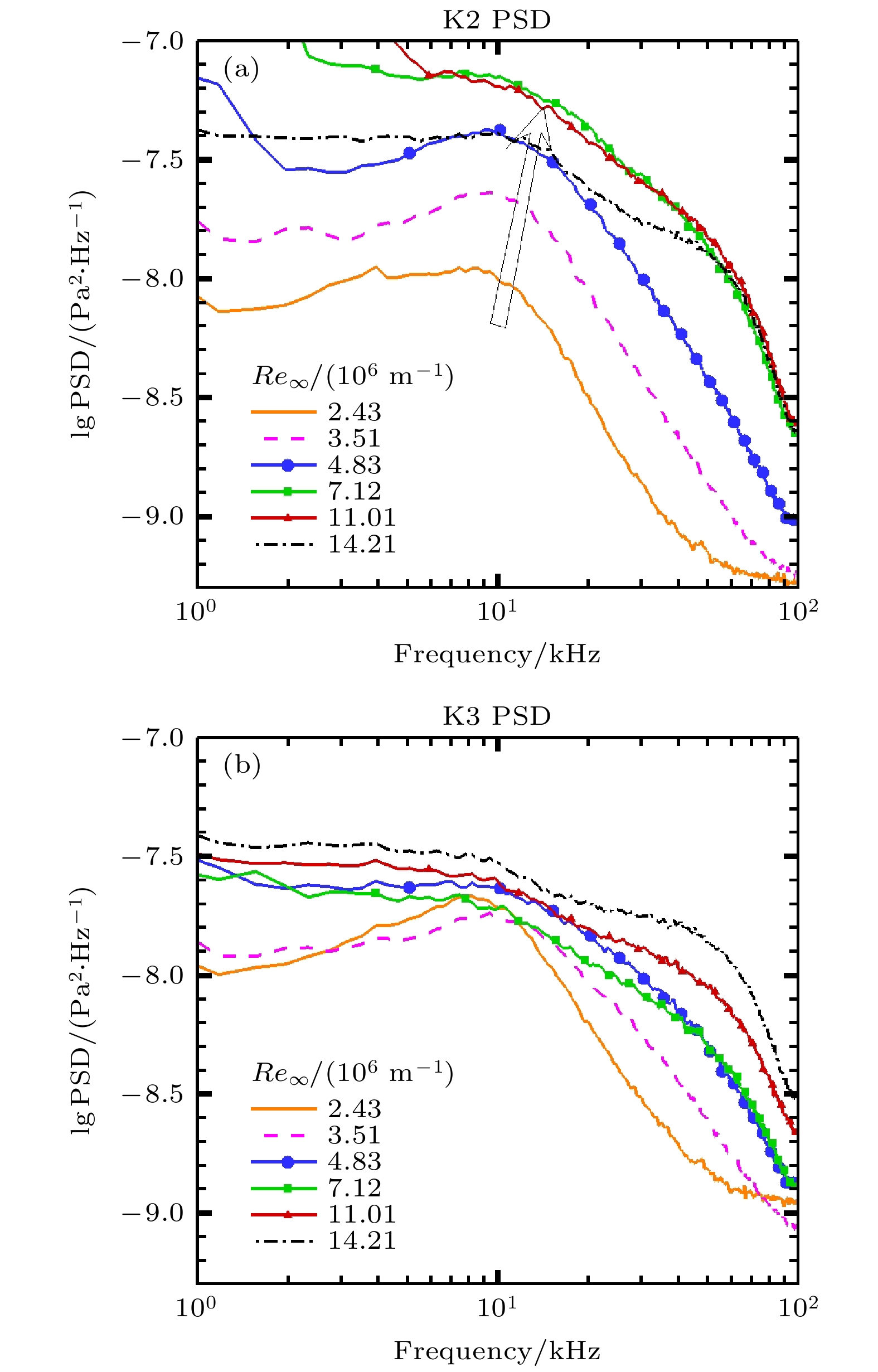
图 8 K2和K3传感器得到的5°攻角三角翼迎风面的PSD结果 (a) K2; (b) K3
Fig. 8. PSD results of K2 and K3 in different Reynold number on the windward at α = 5°: (a) K2; (b) K3.
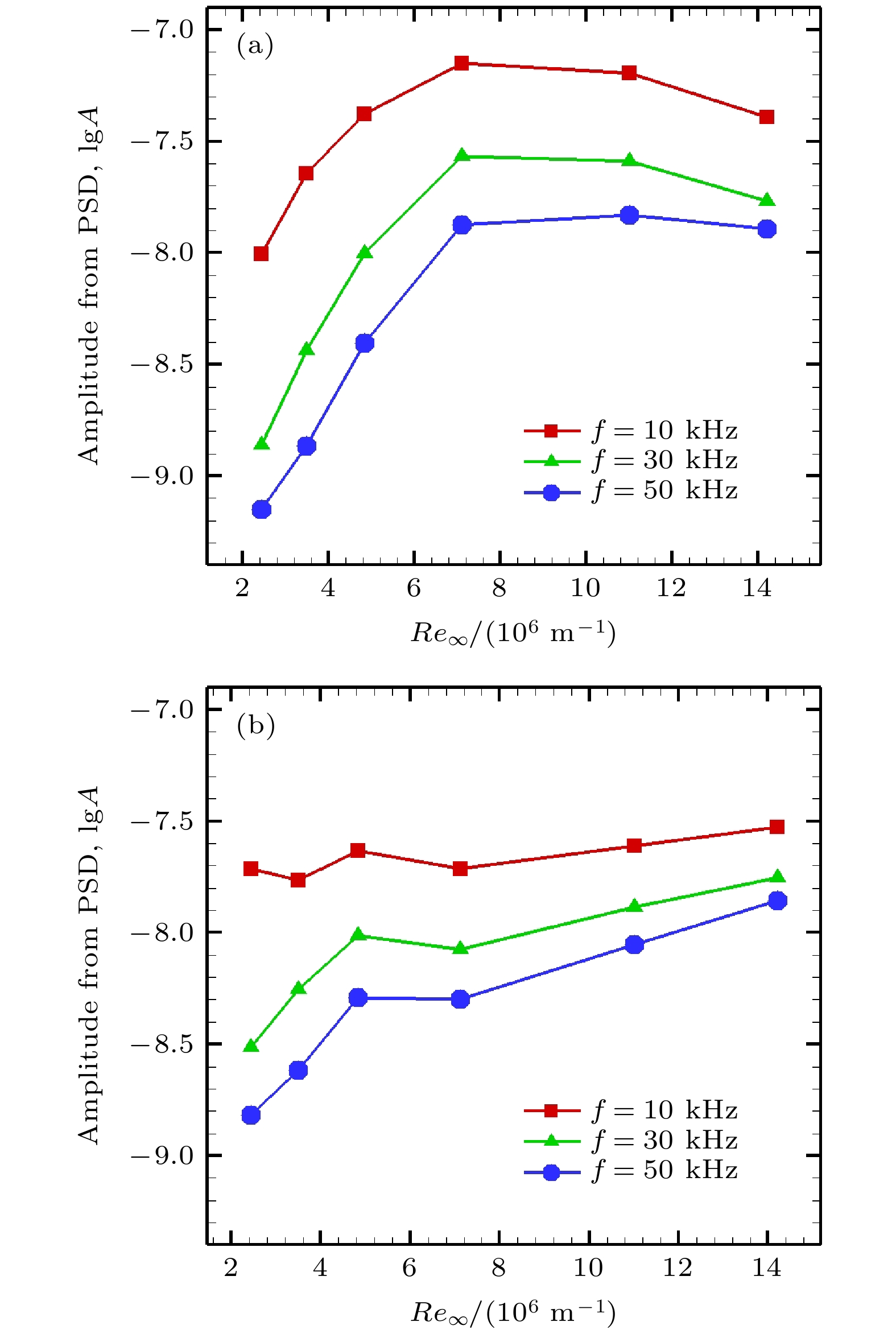
图 9 不同频率下的幅值随雷诺数增长曲线 (a) K2处; (b) K3处
Fig. 9. Growth of the amplitude in different frequency: (a) K2; (b) K3.

图 10 10°攻角下K2-K4得到的PSD结果 (a) 2.44 × 106 m–1; (b) 4.83 × 106 m–1; (c) 11.10 × 106 m–1
Fig. 10. PSD results of sensors K2-K4 on the windward side at α = 10°: (a) 2.44 × 106 m–1; (b) 4.83 × 106 m–1; (c) 11.10 × 106 m–1.
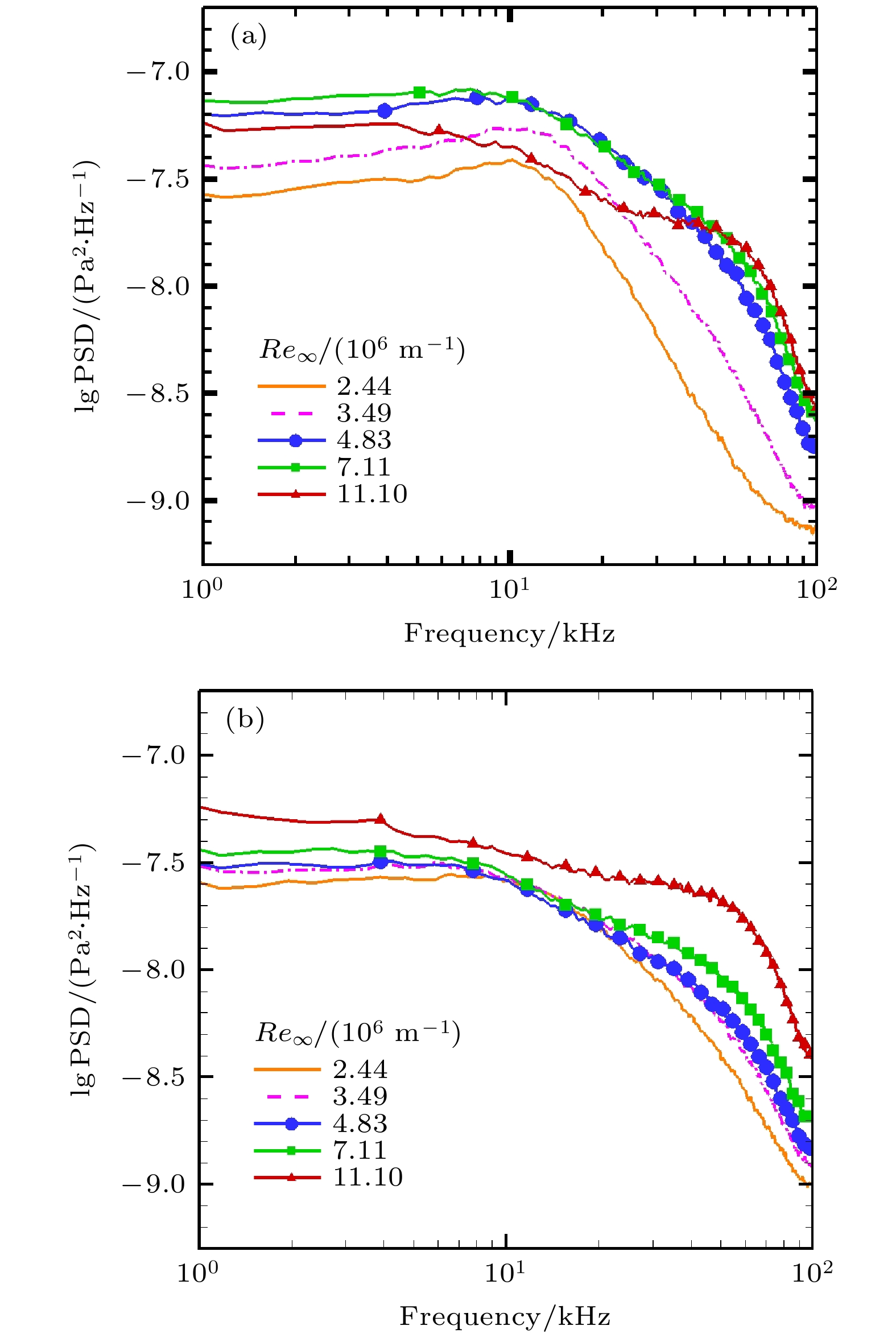
图 11 10°攻角三角翼迎风面的PSD结果 (a) K2; (b) K3
Fig. 11. PSD results on the windward side of the delta wing at α = 10°: (a) K2; (b) K3.
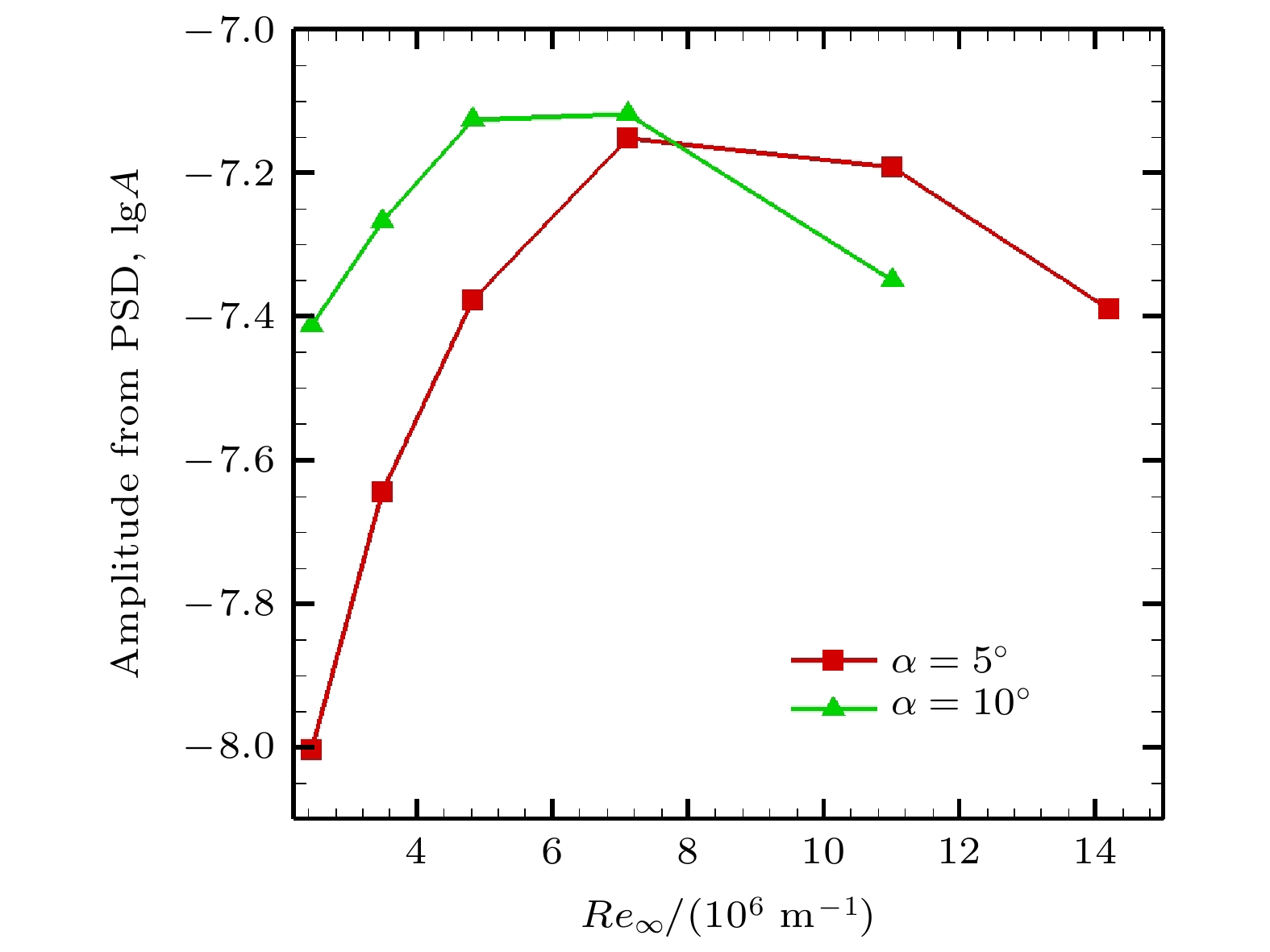
图 12 K2位置处10 kHz扰动波幅值随雷诺数的变化
Fig. 12. Growth of the amplitude at frequency of 10 kHz at K2.
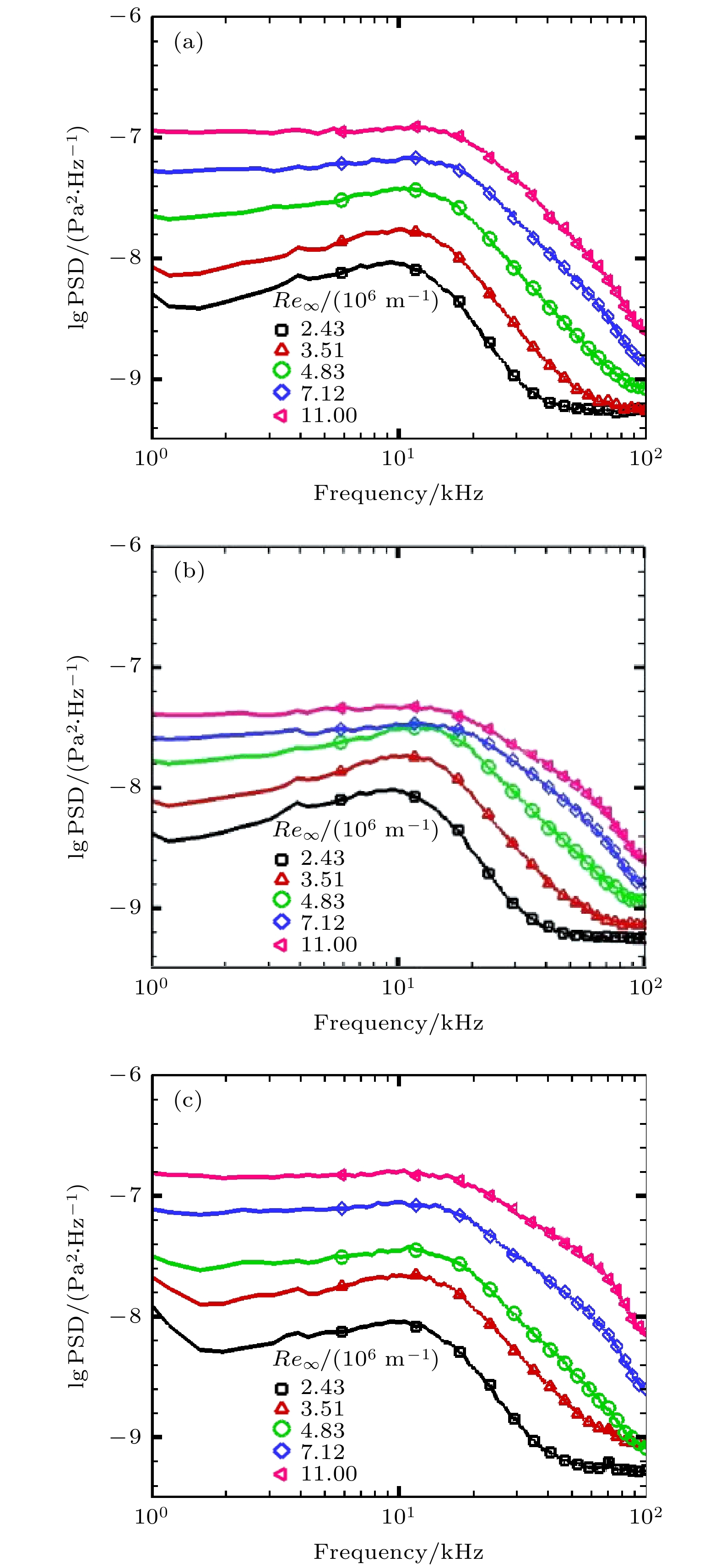
图 14 K7—K9传感器所测5°攻角迎风面PSD结果 (a) K7; (b) K8; (c) K9
Fig. 14. PSD results from sensors K7—K9 at α = 5°: (a) K7; (b) K8; (c) K9.
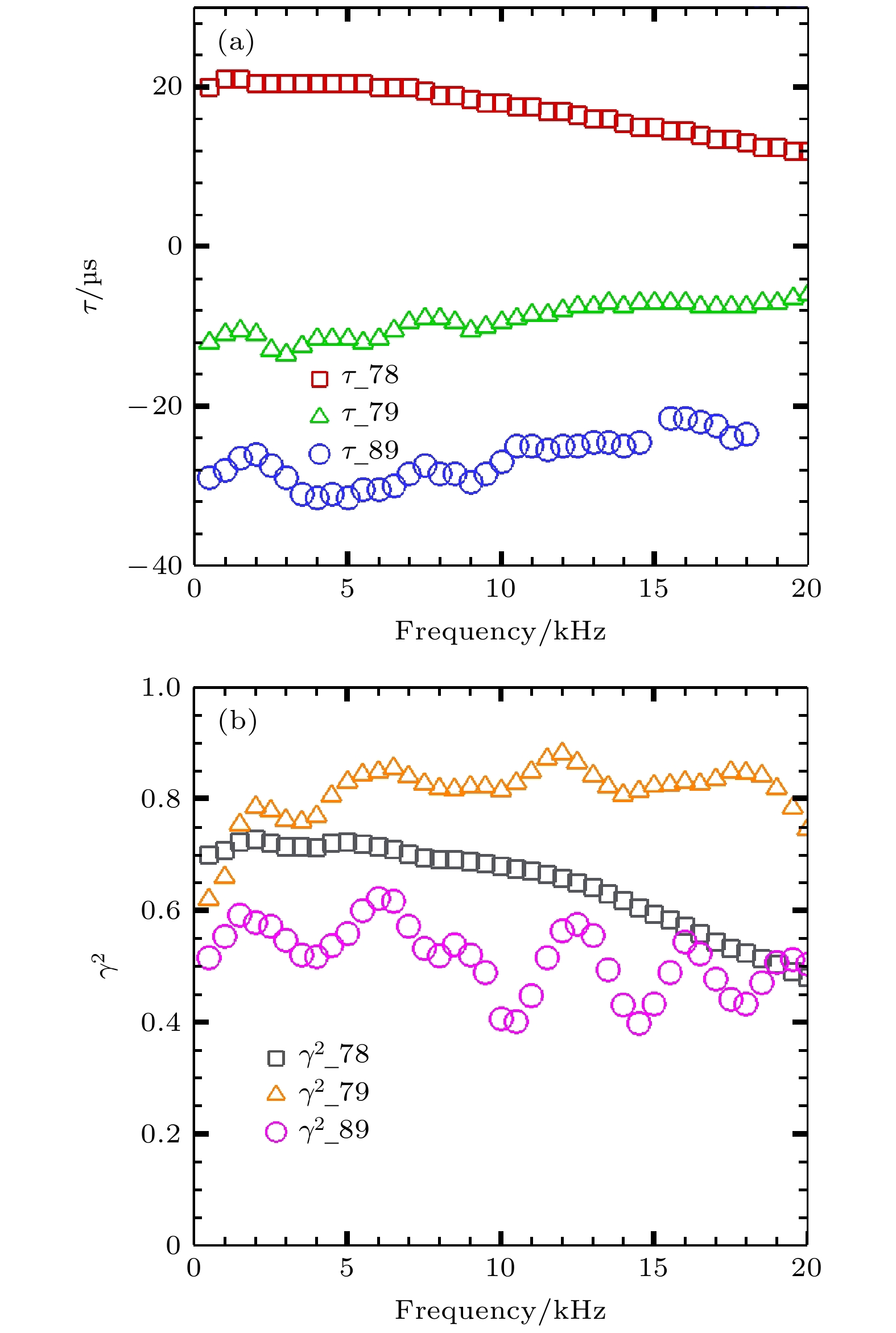
图 15 三个传感器对所测信号的延迟时间τ和相关系数γ2
Fig. 15. Delay time τ and correlation coefficients γ2 of signal at three sensor pairs.
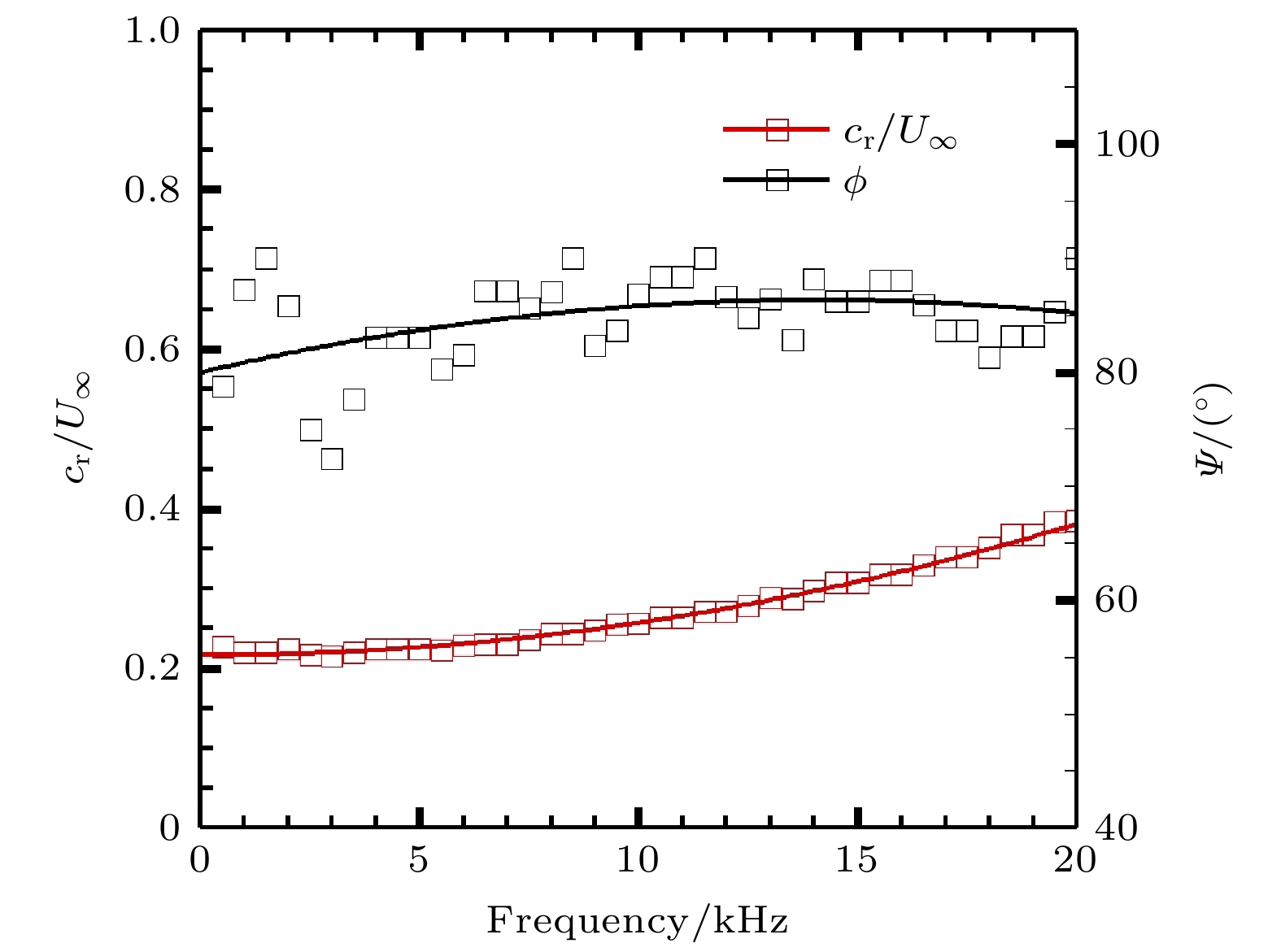
图 16 非定常横流波的相速度和传播角度(α = 5°, Re∞ = 2.43 × 106 m–1)
Fig. 16. Phase velocity and wave angle of traveling crossflow waves (α = 5°, Re∞ = 2.43 × 106 m–1).
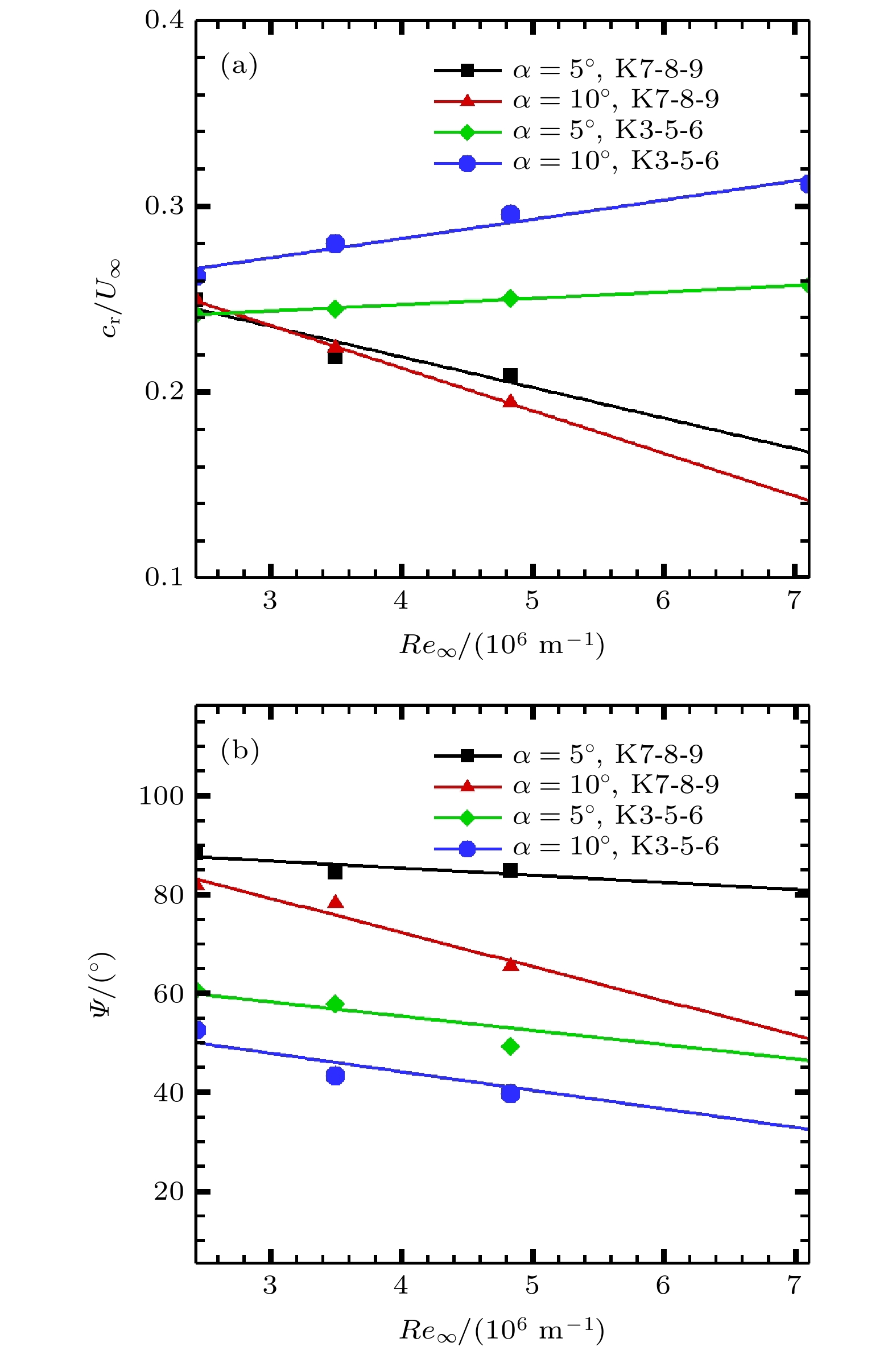
图 17 不同攻角和雷诺数下横流波的相速度和传播角度 (a) 无量纲相速度; (b) 传播角度
Fig. 17. Dimensionless phase velocity and wave propagation angle of crossflow waves at different conditions: (a) Dimensionless phase velocity; (b) wave propagation angle.
表 1 Kulite阵列的坐标
Table 1. Coordinate of the two Kulite arrays.
Sensor No. x/mm y/mm K3 403.88 59.14 K5 406.88 56.14 K6 409.88 56.14 K7 300 50.84 K8 300 46.84 K9 302 52.84  下载: 导出CSV
下载: 导出CSV
-
[1] Schneider S P 2004 Prog. Aerosp. Sci. 40 1
Google Scholar
[2] Mack L M 1975 AIAA J. 13 278
Google Scholar
[3] Saric W S, Reed H L, White E B 2003 Annu. Rev. Fluid Mech. 35 413
Google Scholar
[4] Deyhle H, Bippes H 1996 J. Fluid Mech. 316 73
Google Scholar
[5] Poll D I A 1985 J. Fluid Mech. 150 329
Google Scholar
[6] Malik M R, Li F, Choudhari M, Chang C L 1999 J. Fluid Mech. 399 85
Google Scholar
[7] Edelman J B, Schneider S P 2018 AIAA J. 56 182
Google Scholar
[8] Craig S A, Saric W S 2016 J. Fluid Mech. 808 224
Google Scholar
[9] Corke T, Arndt A, Matlis E, Semper M 2018 J. Fluid Mech. 856 822
Google Scholar
[10] Arndt A, Corke T, Matlis E, Semper M 2020 J. Fluid Mech. 887 A30
Google Scholar
[11] Moyes A J, Paredes P, Kocian T S, Reed H L 2017 J. Fluid Mech. 812 370
Google Scholar
[12] Xu G, Chen J, Liu G, Dong S, Fu S 2019 J. Fluid Mech. 873 914
Google Scholar
[13] Ward C A C 2014 Ph. D. Dissertation (Indiana: Pudue University)
[14] Borg M P, Kimmel R L, Stanfield S 2013 43rd Fluid Dynamics Conference San Diego, CA, June 24−27, 2013 p2737
[15] Borg M P, Kimmel R L, Stanfield S 2015 J. Spacecraft Rockets 52 664
Google Scholar
[16] Li F, Choudhari M, Chang C L, White J 2010 10th AIAA/ASME Joint Thermophysics and Heat Transfer Conference Chicago, Illinois, June 28−July 1, 2010 p4643
[17] Niu H B, Yi S H, Liu X L, Lu X G, He L 2019 AIAA J. 57 5566
Google Scholar
[18] 刘小林, 易仕和, 牛海波, 陆小革, 赵鑫海 2018 物理学报 67 174701
Google Scholar
Liu X L, Yi S H, Niu H B, Lu X G, Zhao X H 2018 Acta Phys. Sin. 67 174701
Google Scholar
[19] 刘小林, 易仕和, 牛海波, 陆小革 2018 物理学报 67 214701
Google Scholar
Liu X L, Yi S H, Niu H B, Lu X G 2018 Acta Phys. Sin. 67 214701
Google Scholar
[20] Niu H, Yi S, Liu X, Lu X, Gang D 2020 Chin. J. Aeronaut. 33 1889
Google Scholar
[21] Niu H, Yi S, Liu X, Huo J, Jin L 2020 Int. J. Heat Fluid Flow 86 108746
Google Scholar
[22] Lu X, Yi S, He L, Liu X, Niu H 2020 Fluid Dyn. 55 111
Google Scholar
[23] Cook W J, Felderman E J 1970 AIAA J. 8 1366
Google Scholar
[24] Zhao Y X, Yi S H, Tian L F, He L, Cheng Z Y 2009 Sci. China 52 3640
Google Scholar
[25] He L, Yi S H, Zhao Y X, Tian L F, Chen Z 2011 Chin. Sci. Bull. 56 489
Google Scholar
[26] Liu X L, Yi S H, Xu X W, Shi Y, Ouyang T C, Xiong H 2019 Phys. Fluids 31 074108
Google Scholar
[27] 陆昌根, 朱晓清, 沈露予 2017 物理学报 66 204702
Google Scholar
Lu C G, Zhu X Q, Shen L Y 2017 Acta Phys. Sin. 66 204702
Google Scholar
[28] 沈露予陆昌根 2017 物理学报 66 014703
Google Scholar
Shen L Y, Lu C G 2017 Acta Phys. Sin. 66 014703
Google Scholar
[29] Tian L, Yi S, Zhao Y, He L, Cheng Z 2009 Sci. China, Ser. G 52 1357
Google Scholar
[30] 赵磊 2016 博士学位论文 (天津: 天津大学)
Zhao L 2016 Ph. D. Dissertation (Tianjin: Tianjin University) (in Chinese)
[31] Poggie J, Kimmel R L, Schwoerke S N 2000 AIAA J. 38 251
Google Scholar


 下载:
下载:

计量
- 文章访问数: 7775
- PDF下载量: 98
- 被引次数: 0
