










-
为实现仅用一幅离轴数字全息图便能直接恢复相位, 提出一种利用空间载波相移技术(spatial carrier phase shift, SCPS)和线性回归相结合的离轴数字全息去载波相位恢复算法. 首先, 利用SCPS将一幅离轴数字全息图分为四幅含有载波相移的全息图, 其中载波相移由沿行、列两个方向的正交载波所引入; 然后, 将四幅载波相移全息图作为输入, 将所求物体相位和两个正交的载波作为未知量, 结合最小二乘法和线性回归同时求出载波和相位信息. 相较于已有的去载波技术, 本算法无需背景全息图作为参考, 便可准确地去除载波, 实现高质量的相位重建. 本文结合数值仿真和具体实验结果验证本算法的有效性和优越性.Benefitting from the high measurement efficiency, off-axis digital holography (DH) has become a most powerful DH technique for fast and high-accuracy measurement. Owing to the carrier frequency, the real image can be isolated easily in the Fourier spectrum of one off-axis hologram, so that the Fourier transform algorithm (FTA) is the most widely used algorithm for off-axis DH to realize the phase retrieval. In the FTA, one of the most important tasks is to figure out the accurate peak position of the real image and then shift the real image to the center of spectrum to remove the carrier. However, owing to the digitalization of the hologram, the peak position of the real spectrum is always not located at an integral pixel position in the practical applications, resulting in carrier residuals, thereby lowering the retrieval quality. Much work on accurately determining the peak position has been conducted to suppress the carrier residuals, such as by using the spectrum centroid method and zero padding. However, those estimation algorithms can achieve only satisfied accuracy in some situations. Then, spatial carrier phase shift (SCPS) is utilized to expand the utilization of space-bandwidth and avoid the spectrum leakage caused by band-pass filtering. The SCPS decomposes one off-axis hologram into several sub-holograms, in which the carrier induces the phase shifts between sub-holograms. Many on-axis phase retrieval algorithms are combined with SCPS to retrieve the phase from one off-axis hologram. However, the retrieved phase is usually composed of the sample phase and the carrier, so the accurate carrier information is also required to remove the carrier and obtain the correct reconstructed phase. In this paper, an accurate phase retrieval with carrier removal from single off-axis hologram by using the linear regression is proposed to achieve the simultaneous phase retrieval and carrier removal. In this method, four phase-shifted sub-holograms are extracted first from one off-axis hologram by SCPS. Since the phase shift between sub-holograms is linearly proportional to the carrier, the linear regression can be combined with least-square method to retrieve the phase and carrier simultaneously. Both the simulation and experimental results show that the proposed method can determine the carrier accurately and obtain correct phase without carrier. We believe that this proposed method can be applied to practical measurement.
-
Keywords:
- off-axis digital holography /
- phase retrieval /
- carrier frequency /
- linear regression
[1] Popescu G, Ikeda T, Dasari R R, Feld M S 2006 Opt. Lett. 31 775
 Google Scholar
Google Scholar
[2] Gao P, Harder I, Nercissian V, Mantel K, Yao B L 2010 Opt. Lett. 35 712
Google Scholar
[3] Bai H Y, Shan M G, Zhong Z, Guo L L, Zhang Y B 2015 Appl. Opt. 54 9513
Google Scholar
[4] Girshovitz P, Shaked N T 2013 Opt. Express 21 5701
Google Scholar
[5] Mahajan S, Trivedi V, Vora P, Chhaniwal V, Javidi B, Anand A 2015 Opt. Lett. 40 3743
Google Scholar
[6] Shaked N T, Micó V, Trusiak M, Kuś A, Mirsky S K 2020 Adv. Opt. Photonics 12 556
Google Scholar
[7] Bai H Y, Shan M G, Zhong Z, Guo L L, Zhang Y B 2015 Opt. Laser Eng. 75 1
[8] Xia P, Wang Q H, Ri S 2020 Opt. Express 28 19988
Google Scholar
[9] Sun P, Zhong L Y, Luo C S, Niu W H, Lu X X 2015 Sci. Rep. 5 12053
Google Scholar
[10] Pham H V, Edwards C, Goddard L L, Popescu G 2013 Appl. Opt. 52 A97
Google Scholar
[11] Girshovitz P, Shaked N T 2014 Opt. Lett. 39 2262
Google Scholar
[12] Sha B, Liu X, Ge X L, Guo C S 2014 Opt. Express 22 23066
Google Scholar
[13] Hao B G, Shan M G, Zhong Z, Diao M, Wang Y, Zhang Y B 2015 J. Opt. 17 035602
Google Scholar
[14] Fan Q, Yang H R, Li G P, Zhao J L 2010 J. Opt. 12 115401
Google Scholar
[15] Du Y Z, Feng G Y, LI H R, Zhou S H 2014 Optik 125 1056
Google Scholar
[16] Hincapié-Zuluaga D, Herrera-Ramírez J, Garcia-Sucerquia J 2018 Optik 169 109
Google Scholar
[17] Deng D N, Qu W J 2020 IEEE Photonics J. 12 1
[18] Bai H Y, Min R, Yang Z H 2019 Opt. Rev. 26 549
Google Scholar
[19] Deng D N, Qu W J, He W Q, Wu Y, Liu X L, Peng X 2017 Opt. Lett. 42 5282
Google Scholar
[20] Guo H W, Yang Q, Chen M Y 2007 Appl. Opt. 46 1057
Google Scholar
[21] Styk A, Patorski K 2007 Appl. Opt. 46 4613
Google Scholar
[22] Xu J H, Xu Q, Peng H S 2008 Appl. Opt. 47 5446
Google Scholar
[23] Huang L B, Lu X X, Li J S, Zhou Y F, Xiong J X, Tian J D, Zhong L Y 2016 Opt. Express 24 13744
Google Scholar
[24] Liu F W, Wu Y Q, Wu F, König N, Schmitt R, Wan Y J, Xu Y 2018 Sci. Rep. 8 148
Google Scholar
[25] Wang Z, Han B 2004 Opt. Lett. 29 1671
Google Scholar
[26] Liu Q, Wang Y, Ji F, He J 2013 Opt. Express 21 29505
Google Scholar
[27] Zhong Z, Zhao H, Shan M G, Liu B, Lu W L, Zhang Y B 2020 Opt. Laser Eng. 127 105954
Google Scholar
-

图 2 (a) 光程差100 nm相位型半球生成的离轴全息图; (b)—(f) 使用FTA, SCM, 10倍ZP, 20倍ZP, DEA和本算法的恢复结果
Fig. 2. (a) Off-axis hologram of a phase hemisphere with 100 nm optical path difference; (b)–(f) retrieved phase maps by FTA, SCM, ZP with 10 times zero-padding, ZP with 20 times zero-padding, DEA and the proposed algorithm.

图 3 确定高斯白噪声影响下的(a)本算法和(b)DEA的恢复结果, 以及(c)本算法和(d)DEA的残差图
Fig. 3. Retrieved phase maps from the hologram with Gaussian white noise by (a) the proposed algorithm and (b) DEA, and the corresponding residue maps by (c) the proposed algorithm and (d) DEA.

图 4 不同噪声情况下本算法和DEA算法对应残差值的PV和SD
Fig. 4. PV and SD of the residue maps by the proposed algorithm and DEA with different variance.
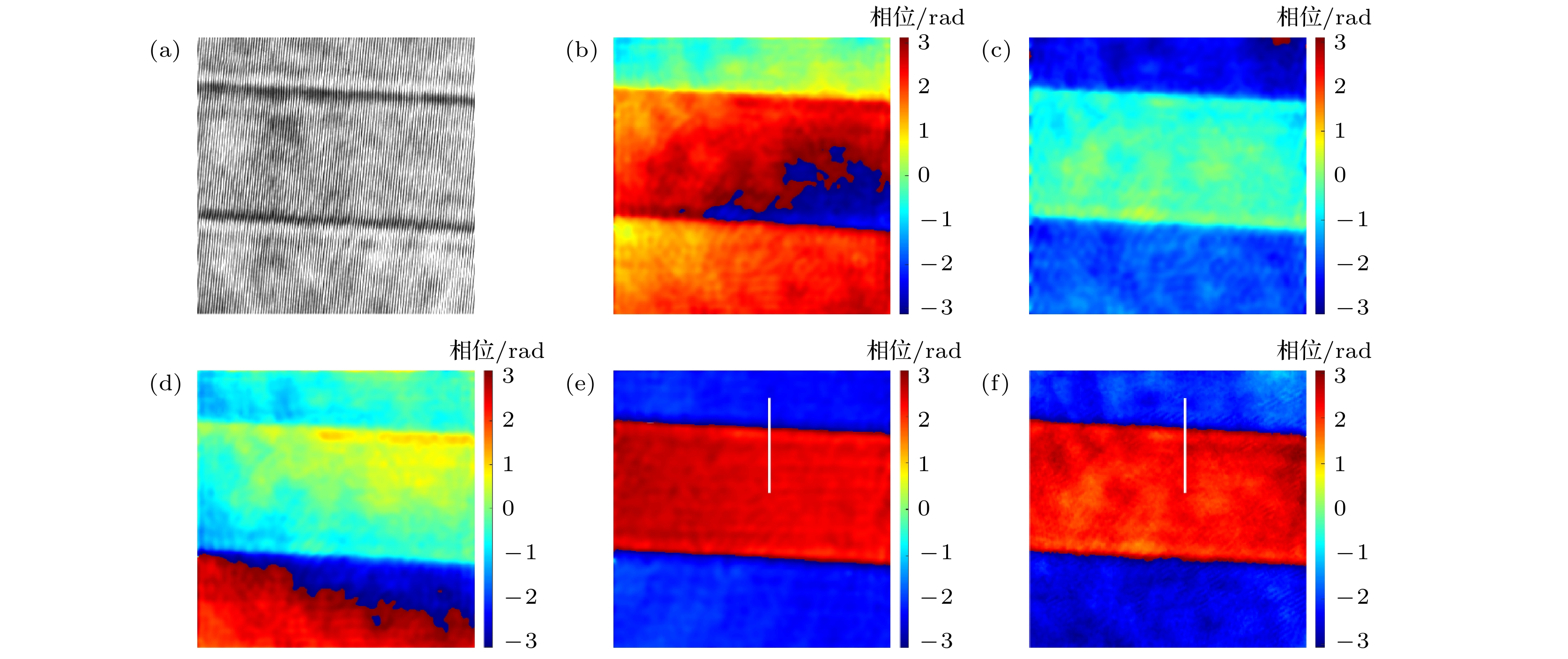
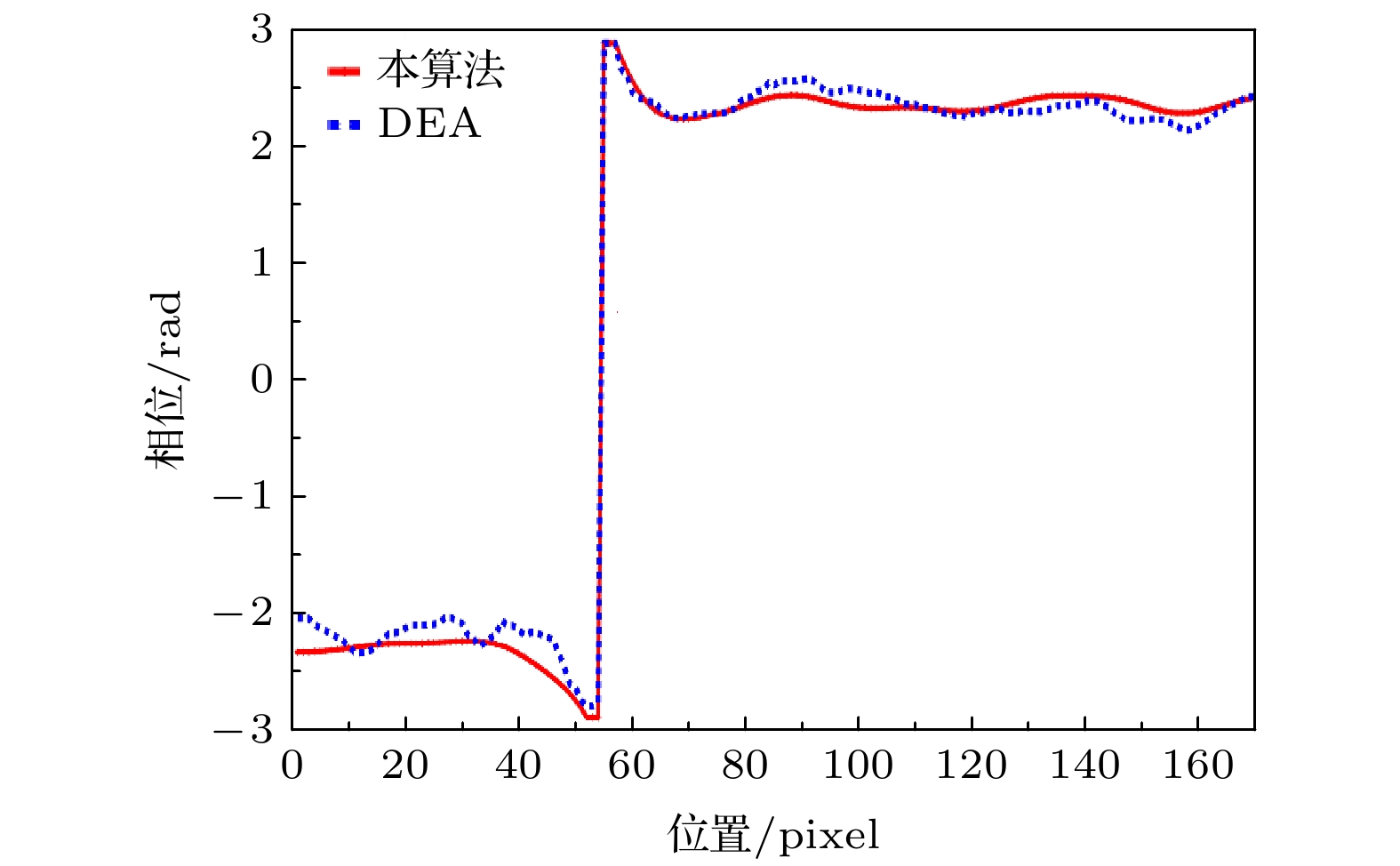
图 5 硅片实验结果 (a)全息图; 利用(b) FTA, (c)10倍ZP, (d) SCM, (e) DEA和(f)本算法的恢复结果
Fig. 5. Experimental results for silicon wafer: (a) Hologram; retrieved phase maps by (b)FTA, (c)ZP with 10 times zero-padding, (d) SCM, (e) DEA and (f) the proposed algorithm.
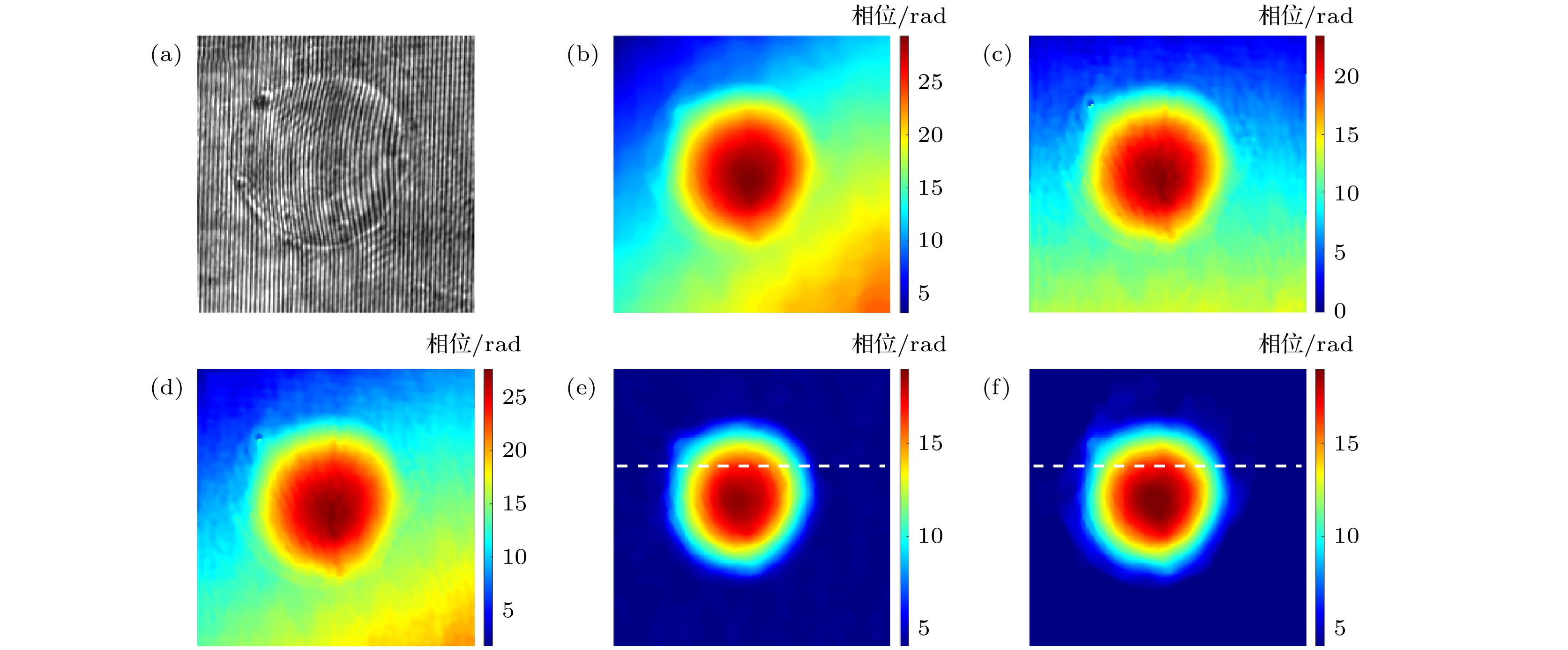
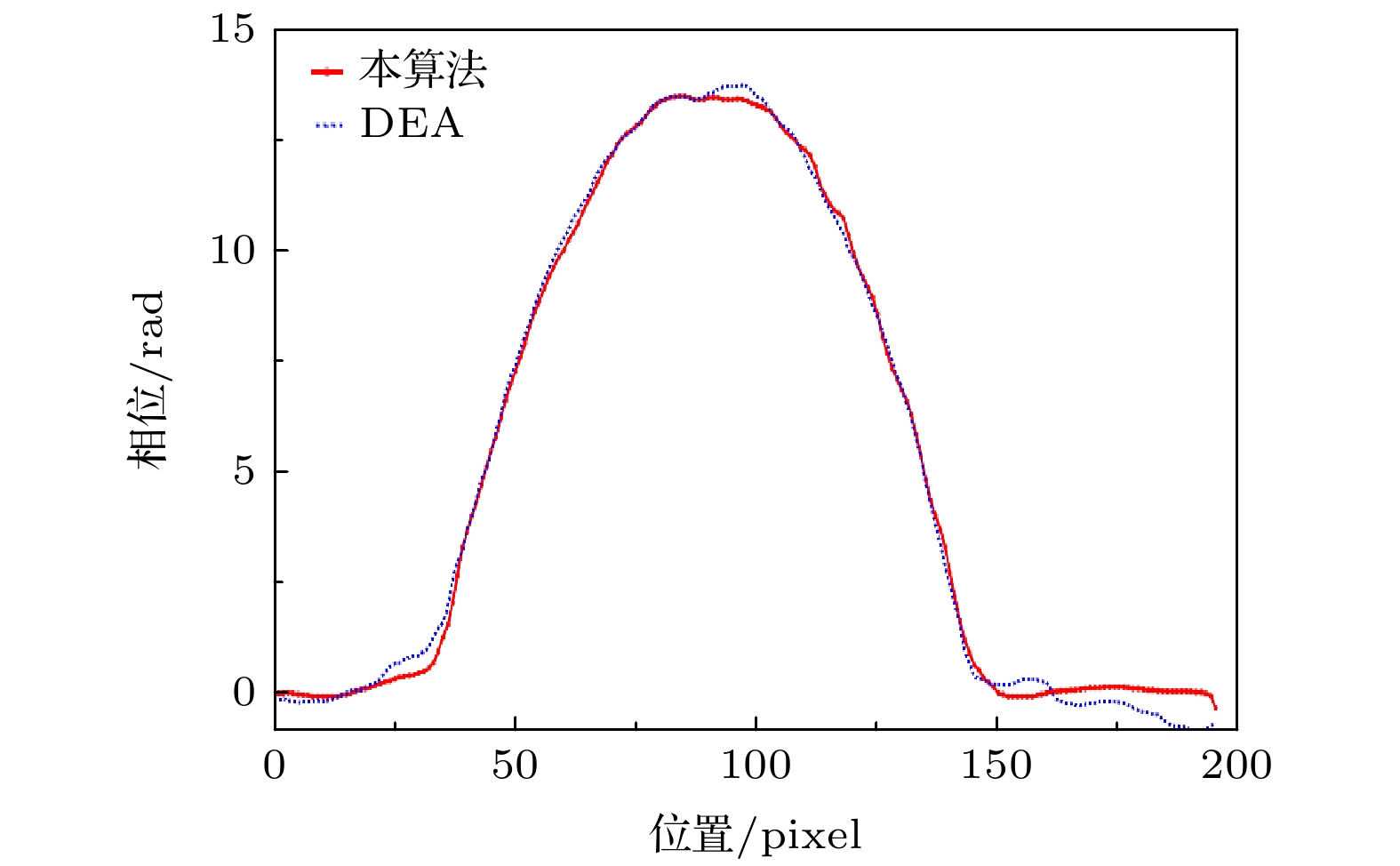
图 7 酒精实验结果 (a)全息图; 利用(b) FTA, (c)10倍ZP, (d) SCM, (e) DEA和(f)本算法的恢复结果
Fig. 7. Experimental results for alcohol: (a) Hologram; retrieved phase maps by (b)FTA, (c)ZP with 10 times zero-padding, (d) SCM, (e) DEA and (f) the proposed algorithm.
-
[1] Popescu G, Ikeda T, Dasari R R, Feld M S 2006 Opt. Lett. 31 775
Google Scholar
[2] Gao P, Harder I, Nercissian V, Mantel K, Yao B L 2010 Opt. Lett. 35 712
Google Scholar
[3] Bai H Y, Shan M G, Zhong Z, Guo L L, Zhang Y B 2015 Appl. Opt. 54 9513
Google Scholar
[4] Girshovitz P, Shaked N T 2013 Opt. Express 21 5701
Google Scholar
[5] Mahajan S, Trivedi V, Vora P, Chhaniwal V, Javidi B, Anand A 2015 Opt. Lett. 40 3743
Google Scholar
[6] Shaked N T, Micó V, Trusiak M, Kuś A, Mirsky S K 2020 Adv. Opt. Photonics 12 556
Google Scholar
[7] Bai H Y, Shan M G, Zhong Z, Guo L L, Zhang Y B 2015 Opt. Laser Eng. 75 1
[8] Xia P, Wang Q H, Ri S 2020 Opt. Express 28 19988
Google Scholar
[9] Sun P, Zhong L Y, Luo C S, Niu W H, Lu X X 2015 Sci. Rep. 5 12053
Google Scholar
[10] Pham H V, Edwards C, Goddard L L, Popescu G 2013 Appl. Opt. 52 A97
Google Scholar
[11] Girshovitz P, Shaked N T 2014 Opt. Lett. 39 2262
Google Scholar
[12] Sha B, Liu X, Ge X L, Guo C S 2014 Opt. Express 22 23066
Google Scholar
[13] Hao B G, Shan M G, Zhong Z, Diao M, Wang Y, Zhang Y B 2015 J. Opt. 17 035602
Google Scholar
[14] Fan Q, Yang H R, Li G P, Zhao J L 2010 J. Opt. 12 115401
Google Scholar
[15] Du Y Z, Feng G Y, LI H R, Zhou S H 2014 Optik 125 1056
Google Scholar
[16] Hincapié-Zuluaga D, Herrera-Ramírez J, Garcia-Sucerquia J 2018 Optik 169 109
Google Scholar
[17] Deng D N, Qu W J 2020 IEEE Photonics J. 12 1
[18] Bai H Y, Min R, Yang Z H 2019 Opt. Rev. 26 549
Google Scholar
[19] Deng D N, Qu W J, He W Q, Wu Y, Liu X L, Peng X 2017 Opt. Lett. 42 5282
Google Scholar
[20] Guo H W, Yang Q, Chen M Y 2007 Appl. Opt. 46 1057
Google Scholar
[21] Styk A, Patorski K 2007 Appl. Opt. 46 4613
Google Scholar
[22] Xu J H, Xu Q, Peng H S 2008 Appl. Opt. 47 5446
Google Scholar
[23] Huang L B, Lu X X, Li J S, Zhou Y F, Xiong J X, Tian J D, Zhong L Y 2016 Opt. Express 24 13744
Google Scholar
[24] Liu F W, Wu Y Q, Wu F, König N, Schmitt R, Wan Y J, Xu Y 2018 Sci. Rep. 8 148
Google Scholar
[25] Wang Z, Han B 2004 Opt. Lett. 29 1671
Google Scholar
[26] Liu Q, Wang Y, Ji F, He J 2013 Opt. Express 21 29505
Google Scholar
[27] Zhong Z, Zhao H, Shan M G, Liu B, Lu W L, Zhang Y B 2020 Opt. Laser Eng. 127 105954
Google Scholar


 下载:
下载:
计量
- 文章访问数: 8362
- PDF下载量: 134
- 被引次数: 0
