










-
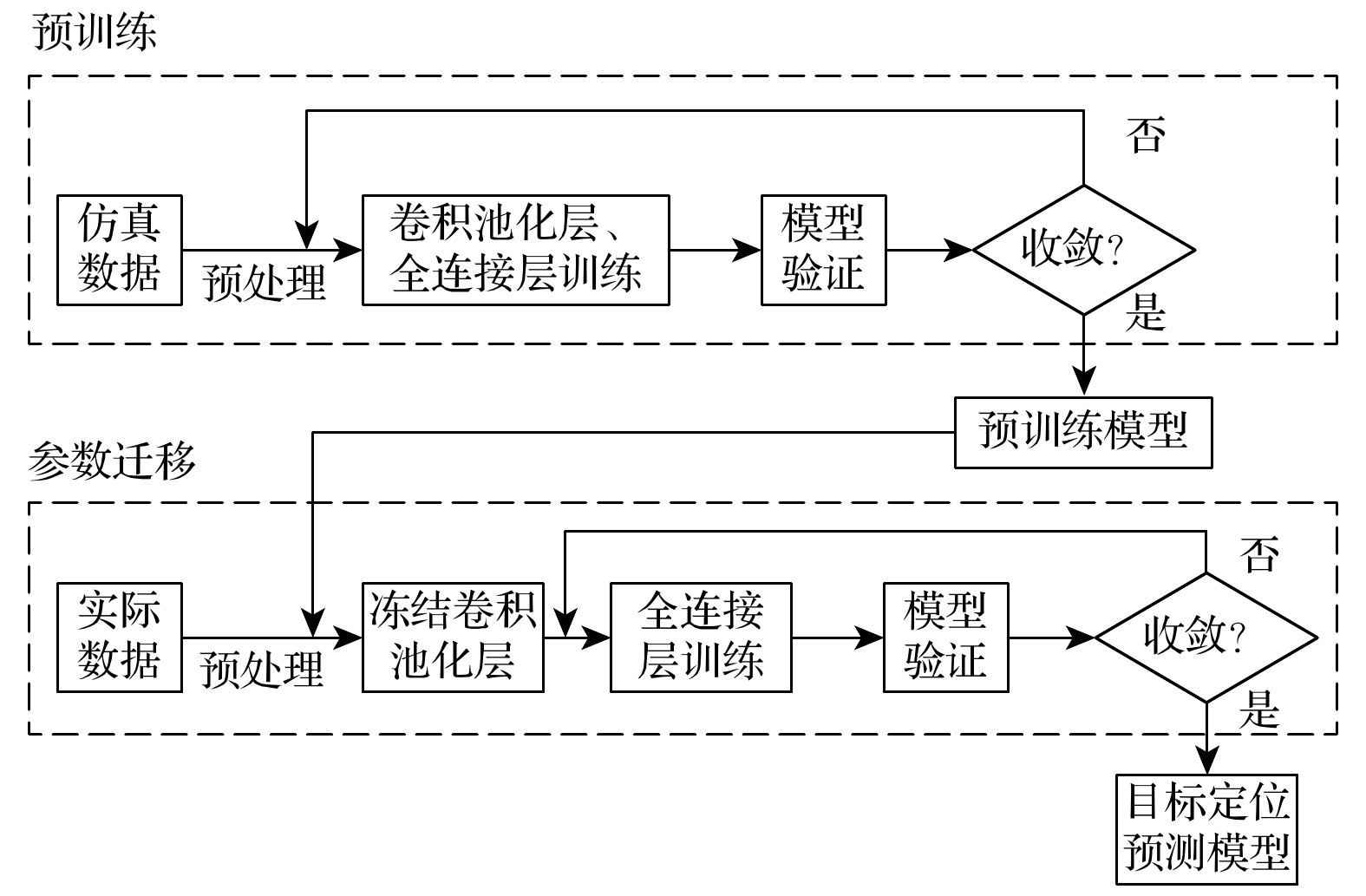
Forward scattering of the target could cause the amplitude and phase aberration of the received sound field, which received attentions in harbor monitoring and anti-submarine. However, the localization under forward scattering configuration is a challenging task due to the strong direct blast. The method based on sensitive kernel function which exploit the aberration of the received signals is sensitive to the environment mismatch and a localization method based on transfer learning framework is developed. The envelopes of aberrations caused by the forward scattering of intruder are firstly extracted by applying pulse compression technique on the received signals, and then normalized by comparing with the case of intruder absent. The data set near the first arrivals on the normalized aberrations are selected as the learning physical parameters. A convolution neural network is trained with these data generated by the forward scattering model to establish a mapping relationship between intruder’s localization and the aberrations of received signal, thus the localization problem is transformed into classification. In the second step, the parameters of the convolutional pooling layer in the pre-trained model are frozen in the transfer learning procedure, and the parameters of the fully connected layer in the pre-trained model are updated using a small amount of data under the fluctuated environment. Simulation of the localization of ellipsoidal targets with a signal-to-noise ratio of 0 dB under a shallow water environment is performed for a scenario to explore the robustness of the method. The results show that the accurate target localization could be achieved in the case of sound velocity profile mismatch. Also, the method is not significantly sensitive to the target scattering function, sound properties of sediment and deployment of transceivers. The sensitivities to the waveguide amplitude and phase fluctuations are further modeled. The results show that good localization accuracy can be obtained in a relatively stable environment, and results are distinguished between the presence and absence of the target. Since the proposed method is derived by the model and real data, the accurate scattering model and sufficient training data are not significantly necessary. The method may provide a promising way for forward scattering detection.
-
Keywords:
- transfer learning /
- target localization /
- forword scattering /
- environmental mismatch
[1] Coraluppi S 2006 IEEE J. Oceanic Eng. 31 964
 Google Scholar
Google Scholar
[2] Bekkerman I, Tabrikian J 2006 IEEE Trans. Signal Process. 54 3873
Google Scholar
[3] Kim S, Ku B, Hong W, Ko H 2008 IEEE Trans. Aerosp. Electron. Syst. 44 1371
Google Scholar
[4] Gillespie B, Rolt K, Edelson G 1997 Acoust. Imaging 23 501
[5] Zverev V A, Matveev A L, Mityugov V V 1995 Acoust. Phys. 41 518
[6] Zverev V A, Korotin P I, Matveev A L, Mityugov V V, Orlov D A, Salin B M, Turchin V I 2001 Acoust. Phys. 47 184
Google Scholar
[7] Song H, Kuperman W A, Akal T, Guerrini P 2003 IEEE J. Oceanic Eng. 28 246
Google Scholar
[8] Roux P, Kuperman W A, Hogkiss W S, Song H J, Akal T 2004 J. Acoust. Soc. Am. 116 1009
Google Scholar
[9] 马敬广, 段敬伟, 惠俊英 2007 应用声学 26 135
Google Scholar
Ma J G, Duan J W, Hui J Y 2007 Applied Acoustics 26 135
Google Scholar
[10] Lei B, Yang K D, Ma Y L 2012 J. Acoust. Soc. Am. 132 284
Google Scholar
[11] Folegot T, Martinelli G, Guerrini P, Stevenson J M 2008 J. Acoust. Soc. Am. 124 2852
Google Scholar
[12] Marandet C, Roux P, Nicolas B, Mars J 2011 J. Acoust. Soc. Am. 129 85
Google Scholar
[13] Yildiz S, Roux P, Rakotonarivo S T, Marandet C, Kuperman W A 2014 J. Acoust. Soc. Am. 135 1800
Google Scholar
[14] Niu H Q, Reeves E, Gerstoft P 2017 J. Acoust. Soc. Am. 142 1176
Google Scholar
[15] Niu H Q, Ozanich E, Gerstoft P 2017 J. Acoust. Soc. Am. 142 455
Google Scholar
[16] Niu H Q, Gong Z X, Ozanich E, Gerstoft P, Wang H B, Li Z L 2019 J. Acoust. Soc. Am. 146 211
Google Scholar
[17] Huang Z Q, Xu J, Gong Z X, Wang H B, Yan Y H 2018 J. Acoust. Soc. Am. 143 2922
Google Scholar
[18] Liu Y N, Niu H Q, Li Z L 2019 Chin. Phys. Lett. 36 47
Google Scholar
[19] Liu W X, Yang Y X, Xu M Q, Lü L G, Liu Z W, Shi Y 2020 J. Acoust. Soc. Am 147 314
Google Scholar
[20] Pan S J, Yang Q 2010 IEEE Trans. Knowl. Data E 22 1345
Google Scholar
[21] Ingento F 1987 J. Acoust. Soc. Am. 82 2051
Google Scholar
[22] 陈燕, 汤渭霖, 范威 2010 声学学报 3 35
Google Scholar
Chen Y, Tang W L, Fan W 2010 Acta Acustica 3 35
Google Scholar
[23] 雷波 2018 水中目标前向散射声场特征及其应用 (北京: 科学出版社) 第58−60页
Lei B 2018 Sound Field Characteristics of Forward Scattering of Target in Water and Its Application (Beijing: Science Press) pp58−60 (in Chinese)
[24] Nair V, Hinton G E 2010 Proceedings of the 27th International Conference on Machine Learning Haifa, Israel, June 21—24, 2010 p807
[25] Ye Z, Hoskinson E, Dewey R K 1997 J. Acoust. Soc. Am. 102 1964
Google Scholar
[26] Porter M B, Bucker H P 1987 J. Acoust. Soc. Am. 82 1349
Google Scholar
-
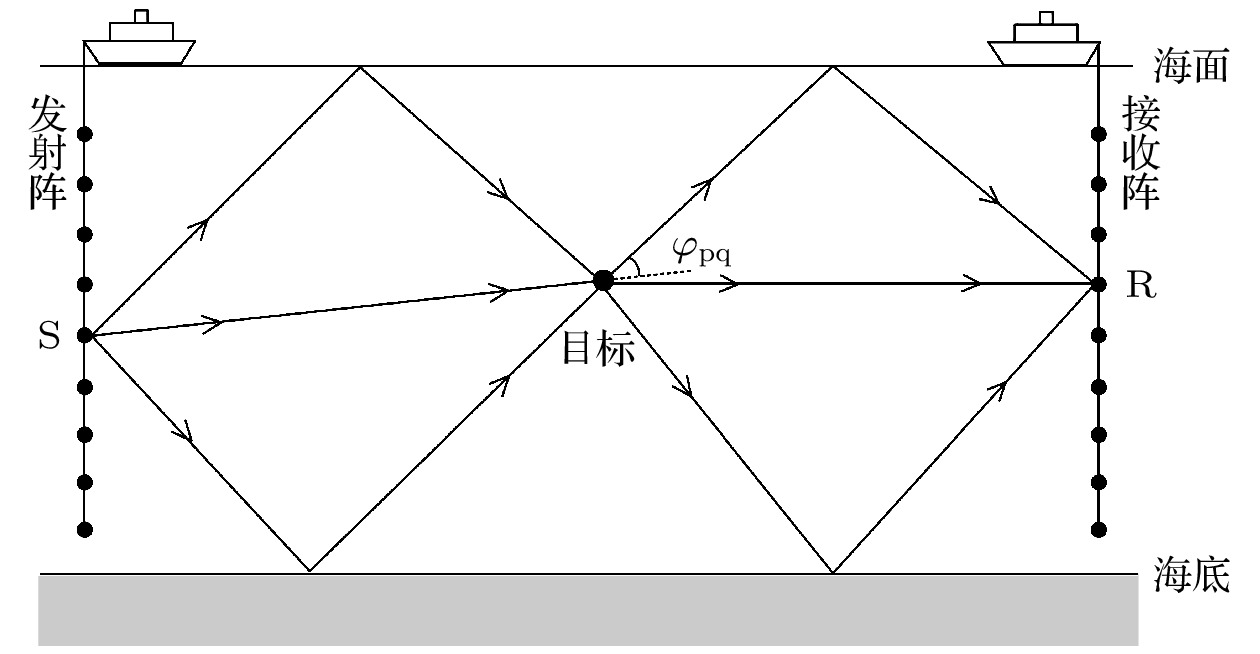
图 1 声屏障示意图
Fig. 1. Schematic diagram of sound barrier with transmitter and receiver arrays.

图 4 仿真实验环境 (a) 仿真实验示意图; (b) 接收到的信号波形; (c) 声场扰动量
$ A(t)$ Fig. 4. Simulation experiment: (a) Diagram of simulation experiment; (b) received signal waveforms; (c) sound field aberration
$ A(t)$ 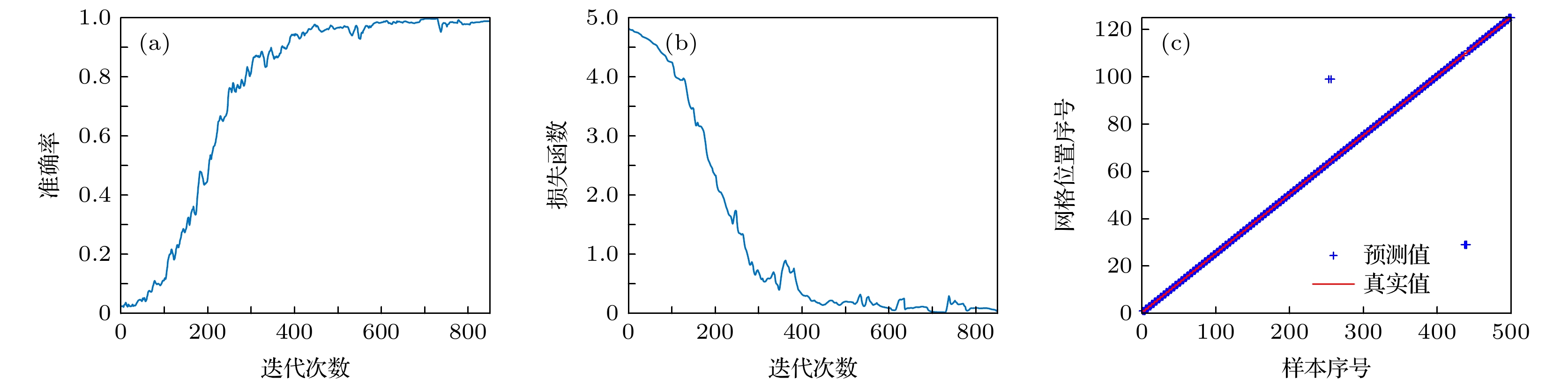
图 5 预训练模型的训练过程和预测结果 (a) 准确率变化; (b) 损失函数变化; (c) 无失配时的预训练模型预测结果
Fig. 5. Training process and prediction results of the pre-training model: (a) Variation of accuracy; (b) variation of loss function; (c) prediction results of the pre-training model without mismatch

图 6 环境失配时神经网络模型预测结果 (a) 预训练模型预测结果; (b) 迁移学习后预测结果
Fig. 6. Prediction results of neural network model with environment mismatch: (a) Prediction results of pre-training model; (b) prediction results after transfer learning

图 7 环境失配时敏感核函数预测结果 (a) 单个样本定位结果; (b)多样本预测结果
Fig. 7. Prediction results of sensitive kernel function with environmental mismatch: (a) Location results of single sample; (b) results of multiple samples
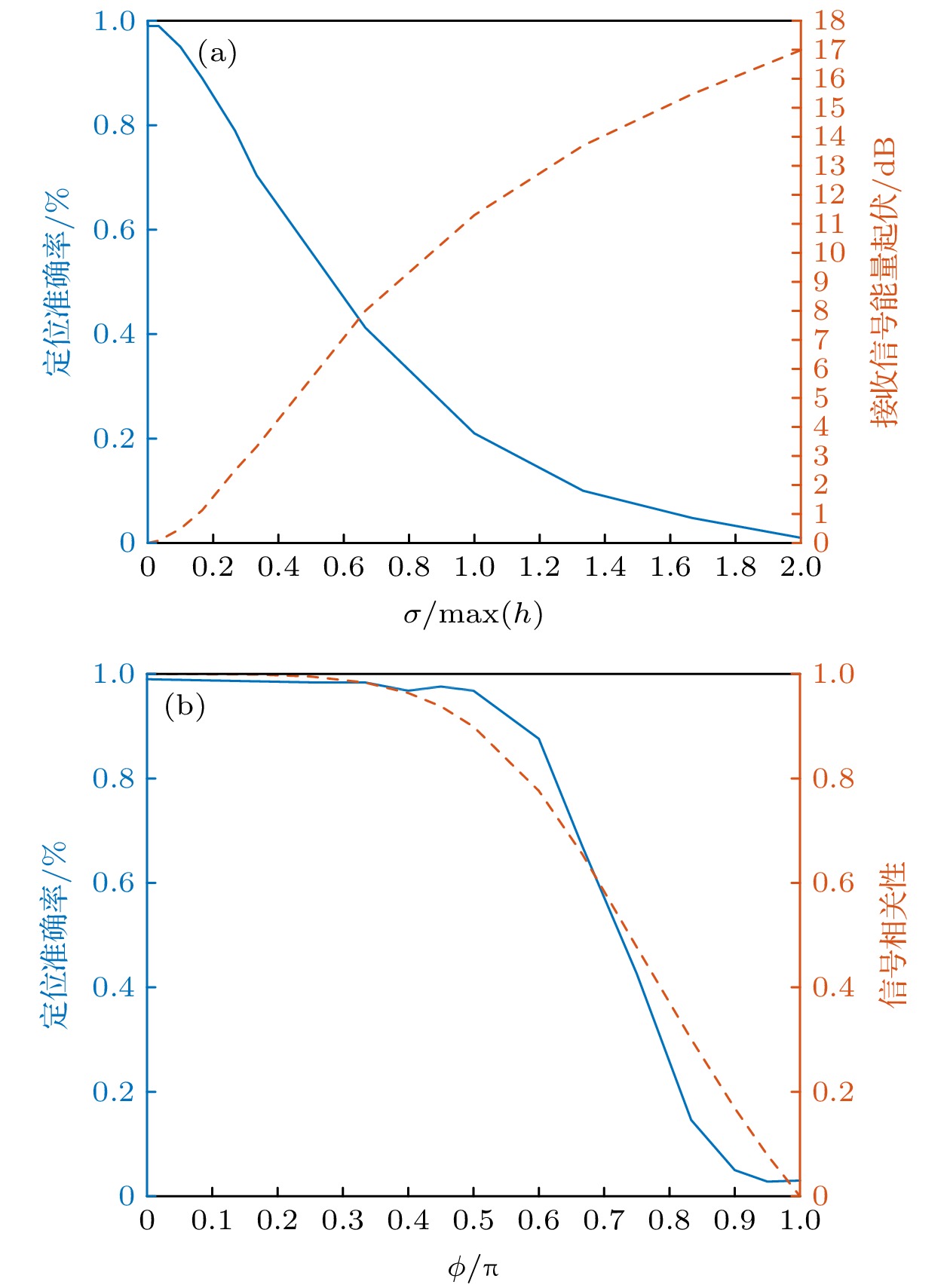
图 8 定位准确率随起伏变化 (a) 定位准确率随幅度起伏的变化; (b) 定位准确率随相位起伏的变化
Fig. 8. Position accuracy with fluctuation variation: (a) Position accuracy with magnitude fluctuation; (b) position accuracy with phase fluctuation

图 9 起伏信道下无目标定位预测结果 (a) 无目标幅度起伏
$ \sigma/{\rm {max}}(h)=0.6$ 的定位预测结果; (b) 无目标相位起伏$ \phi=2\pi/3$ 的定位预测结果Fig. 9. Position result without target in fluctuated channel: (a) Position results without target in magnitude fluctuated channel
$ \sigma/{\rm {max}}(h)=0.6$ ; (b) position results without target in phase fluctuated channel$ \phi=2\pi/3$ 表 1 卷积神经网络参数设置
Table 1. Parameter setting of convolutional neural network
结构参数 具体设置 池化方法 最大池化 优化器 Adam 损失函数 交叉熵 学习率 0.001 b随机失活层丢弃率 0.5  下载: 导出CSV
下载: 导出CSV
表 2 目标散射函数失配时的仿真结果
Table 2. Simulation results of target scattering function mismatch
实际目标
长度/m实际目标圆柱半径/m 目标失配时预测准确率/% 迁移学习后预测准确率/% 35 2.5 77.2 95.2 40 3 79.4 96.0 45 3.5 74.8 93.6
下载: 导出CSV
表 3 海底底质失配时的仿真结果
Table 3. Simulation results of sediment properties mismatch
实际海底
底质类型密度/
(g·cm–3)声速/
(m·s–1)海底底质失配时
预测准确率/%迁移学习后
预测准确率/%泥砂 1.806 1668 78.4 96.0 细砂 1.957 1753 74.6 93.6 粗砂 2.034 1836 71.0 92.0
下载: 导出CSV
表 4 不同发射阵元数时的仿真结果
Table 4. Simulation results of different number of transmitting array elements
发射阵元数 无失配时预测准确率/% 目标失配时预测准确率/% 迁移学习后预测准确率/% 3 95.8 77.6 89.4 4 97.3 81.2 92.6 5 98.7 83.4 95.0 6 99.0 85.4 95.8
下载: 导出CSV
表 5 不同接收阵元数时的仿真结果
Table 5. Simulation results with different number of receiving array elements
接收阵元数 无失配时预测准确率/% 目标失配时预测准确率/% 迁移学习后预测准确率/% 17 92.6 71.4 90.8 19 94.6 77.2 92.2 21 98.7 83.4 95.0 23 98.9 86.8 96.6
下载: 导出CSV
表 6 不同布设深度时的仿真结果
Table 6. Simulation results of different layout depths
发射阵元布设深度/m 无失配时预测准确率/% 目标失配时预测准确率/% 迁移学习后预测准确率/% 20—32 96.2 81.4 90.8 20—80 98.7 83.4 95.0 68—80 96.8 84.0 91.2
下载: 导出CSV
-
[1] Coraluppi S 2006 IEEE J. Oceanic Eng. 31 964
Google Scholar
[2] Bekkerman I, Tabrikian J 2006 IEEE Trans. Signal Process. 54 3873
Google Scholar
[3] Kim S, Ku B, Hong W, Ko H 2008 IEEE Trans. Aerosp. Electron. Syst. 44 1371
Google Scholar
[4] Gillespie B, Rolt K, Edelson G 1997 Acoust. Imaging 23 501
[5] Zverev V A, Matveev A L, Mityugov V V 1995 Acoust. Phys. 41 518
[6] Zverev V A, Korotin P I, Matveev A L, Mityugov V V, Orlov D A, Salin B M, Turchin V I 2001 Acoust. Phys. 47 184
Google Scholar
[7] Song H, Kuperman W A, Akal T, Guerrini P 2003 IEEE J. Oceanic Eng. 28 246
Google Scholar
[8] Roux P, Kuperman W A, Hogkiss W S, Song H J, Akal T 2004 J. Acoust. Soc. Am. 116 1009
Google Scholar
[9] 马敬广, 段敬伟, 惠俊英 2007 应用声学 26 135
Google Scholar
Ma J G, Duan J W, Hui J Y 2007 Applied Acoustics 26 135
Google Scholar
[10] Lei B, Yang K D, Ma Y L 2012 J. Acoust. Soc. Am. 132 284
Google Scholar
[11] Folegot T, Martinelli G, Guerrini P, Stevenson J M 2008 J. Acoust. Soc. Am. 124 2852
Google Scholar
[12] Marandet C, Roux P, Nicolas B, Mars J 2011 J. Acoust. Soc. Am. 129 85
Google Scholar
[13] Yildiz S, Roux P, Rakotonarivo S T, Marandet C, Kuperman W A 2014 J. Acoust. Soc. Am. 135 1800
Google Scholar
[14] Niu H Q, Reeves E, Gerstoft P 2017 J. Acoust. Soc. Am. 142 1176
Google Scholar
[15] Niu H Q, Ozanich E, Gerstoft P 2017 J. Acoust. Soc. Am. 142 455
Google Scholar
[16] Niu H Q, Gong Z X, Ozanich E, Gerstoft P, Wang H B, Li Z L 2019 J. Acoust. Soc. Am. 146 211
Google Scholar
[17] Huang Z Q, Xu J, Gong Z X, Wang H B, Yan Y H 2018 J. Acoust. Soc. Am. 143 2922
Google Scholar
[18] Liu Y N, Niu H Q, Li Z L 2019 Chin. Phys. Lett. 36 47
Google Scholar
[19] Liu W X, Yang Y X, Xu M Q, Lü L G, Liu Z W, Shi Y 2020 J. Acoust. Soc. Am 147 314
Google Scholar
[20] Pan S J, Yang Q 2010 IEEE Trans. Knowl. Data E 22 1345
Google Scholar
[21] Ingento F 1987 J. Acoust. Soc. Am. 82 2051
Google Scholar
[22] 陈燕, 汤渭霖, 范威 2010 声学学报 3 35
Google Scholar
Chen Y, Tang W L, Fan W 2010 Acta Acustica 3 35
Google Scholar
[23] 雷波 2018 水中目标前向散射声场特征及其应用 (北京: 科学出版社) 第58−60页
Lei B 2018 Sound Field Characteristics of Forward Scattering of Target in Water and Its Application (Beijing: Science Press) pp58−60 (in Chinese)
[24] Nair V, Hinton G E 2010 Proceedings of the 27th International Conference on Machine Learning Haifa, Israel, June 21—24, 2010 p807
[25] Ye Z, Hoskinson E, Dewey R K 1997 J. Acoust. Soc. Am. 102 1964
Google Scholar
[26] Porter M B, Bucker H P 1987 J. Acoust. Soc. Am. 82 1349
Google Scholar

 下载:
下载:







计量
- 文章访问数: 8805
- PDF下载量: 165
- 被引次数: 0
