










-
基于冷原子干涉仪的高精度绝对重力动态测量为海洋重力测量提供新的手段, 因而备受关注. 利用自己搭建的船载冷原子干涉式绝对重力测量系统, 在中国南海某海域开展了一系列测量实验. 在动态条件下, 测量噪声的抑制对测量性能的提升至关重要. 本文根据船载绝对重力动态测量系统的物理模型, 提出了一种基于扩展卡尔曼滤波算法的动态绝对重力数据处理方法, 对观测的原子干涉条纹数据进行了时域滤波处理, 获得了绝对重力值的最优估计. 基于该处理方法将航速小于2.1 km/h条件下的绝对重力测量灵敏度从300.2 mGal/Hz1/2提升至136.8 mGal/Hz1/2 (T = 4 ms). 此外, 将处理后的数据与利用地球重力模型(XGM2019)计算的数据进行了比对, 发现两者符合度较好. 这些结果证实了本文提出的数据处理方法的有效性, 并为船载冷原子干涉式绝对重力测量系统的测量噪声的抑制提供了一种新的处理方法.The precision dynamic measurement of absolute gravity based on the cold atom interferometer can provide a new method for marine gravimetry, so that it has attracted more attention. Based on the homemade shipborne cold atom interferometric absolute gravity measurement system, we carry out a series of measurement experiments in a certain area of the South China Sea. Under dynamic conditions, the suppression of measurement noise is essential for the improvement of the measurement performance. According to the physical model of the measurement system, in this paper a data processing method is proposed based on the extended Kalman filter algorithm for the absolute gravity dynamic measurement. The observed atomic interference fringe data are filtered in the time domain to estimate the absolute gravity value. Based on this processing method, the sensitivity of absolute gravity measurement under the condition of ship speed less than 2.1 km/h is improved from 300.2 mGal/Hz1/2 to 136.8 mGal/Hz1/2 (T = 4 ms). Comparing the processed data with the data calculated from the earth gravity model (XGM2019), it is found that both of the data are in good agreement. These results confirm the effectiveness of the data processing method proposed in this paper, and provide a new processing method of suppressing the measurement noise of shipborne cold atom interferometric absolute gravity measurement system.
-
Keywords:
- cold atomic gravimeter /
- absolute gravity measurement /
- atomic interferometer /
- data analysis
[1] Kasevich M, Chu S 1992 Appl. Phys. B:Photophys. Laser Chem. 54 321
 Google Scholar
Google Scholar
[2] Peters A, Chung K Y, Chu S 2001 Metrologia 38 25
Google Scholar
[3] Bidel Y, Carraz O, Charriere R, Cadoret M, Zahzam N, Bresson A 2013 Appl. Phys. Lett. 102 144107
Google Scholar
[4] Ménoret V, Vermeulen P, Le Moigne N, Bonvalot S, Bouyer P, Landragin A, Desruelle B 2018 Sci. Rep. 8 1
[5] Fu Z, Wang Q, Wang Z, Wu B, Cheng B, Lin Q 2019 Chin. Opt. Lett. 17 011204
Google Scholar
[6] Huang P W, Tang B, Chen X, Zhong J Q, Xiong Z Y, Zhou L, Wang J, Zhan M S 2019 Metrologia 56 045012
Google Scholar
[7] Jiang Z, Palinkas V, Arias F E, et al. 2012 Metrologia 49 666
Google Scholar
[8] Farah T, Guerlin C, Landragin A, Bouyer P, Gaffet S, Dos Santos F P, Merlet S 2014 Gyroscopy and Navigation 5 266
Google Scholar
[9] Gillot P, Francis O, Landragin A, Dos Santos F P, Merlet S 2014 Metrologia 51 L15
Google Scholar
[10] Freier C, Hauth M, Schkolnik V, Leykauf B, Schilling M, Wziontek H, Scherneck H G, Muller J, Peters A 2016 J. Phys. Conf. Ser. 723 012050
Google Scholar
[11] Geiger R, Menoret V, Stern G, Zahzam N, Cheinet P, Battelier B, Villing A, Moron F, Lours M, Bidel Y, Bresson A, Landragin A, Bouyer P 2011 Nat. Commun. 2 474
Google Scholar
[12] Fu Z J, Wu B, Cheng B, Zhou Y, Weng K X, Zhu D, Wang Z Y, Lin Q 2019 Metrologia 56 025001
Google Scholar
[13] Wu X, Pagel Z, Malek B S, Nguyen T H, Zi F, Scheirer D S, Muller H 2019 Sci. Adv. 5 eaax0800
Google Scholar
[14] 吴彬, 周寅, 程冰, 朱栋, 王凯楠, 朱欣欣, 陈佩军, 翁堪兴, 杨秋海, 林佳宏, 张凯军, 王河林, 林强 2020 物理学报 69 060302
Google Scholar
Wu B, Zhou Y, Cheng B, Zhu D, Wang K N, Zhu X X, Chen P J, Weng K X, Yang Q H, Lin J H, Zhang K J, Wang H L, Lin Q 2020 Acta Phys. Sin. 69 060302
Google Scholar
[15] Wu S, Feng J, Li C, Su D, Wang Q, Hu R, Mou L 2021 J. Geod. 95 63
Google Scholar
[16] 程冰, 周寅, 陈佩军, 张凯军, 朱栋, 王凯楠, 翁堪兴, 王河林, 彭树萍, 王肖隆, 吴彬, 林强 2021 物理学报 70 040304
Google Scholar
Cheng B, Zhou Y, Chen P J, Zhang K J, Zhu D, Wang K N, Weng K X, Wang H L, Peng S P, Wang X L, Wu B, Lin Q 2021 Acta Phys. Sin. 70 040304
Google Scholar
[17] Bidel Y, Zahzam N, Bresson A, Blanchard C, Cadoret M, Olesen A V, Forsberg R 2020 J. Geod. 94 20
Google Scholar
[18] Bidel Y, Zahzam N, Blanchard C, Bonnin A, Cadoret M, Bresson A, Rouxel D, Lequentrec-Lalancette M F 2018 Nat. Commun. 9 627
Google Scholar
[19] Merlet S, Le Goueet J, Bodart Q, Clairon A, Landragin A, Dos Santos F P, Rouchon P 2009 Metrologia 46 87
Google Scholar
[20] Reif K, Gunther S, Yaz E, Unbehauen R 1999 IEEE Trans. Autom. Control 44 714
Google Scholar
[21] Kappl J J 1971 IEEE Trans. Aerosp. Electron. Syst. aes-7 79
[22] Sastry V A, Noton A R M 1971 IEEE Trans. Autom. Control 16 260
Google Scholar
[23] Canciani A, Raquet J 2012 Proceedings of the 2012 International Technical Meeting of The Institute of Navigation, 2012 pp151–185
[24] Tennstedt B, Schön S 2021 Proceedings of 28th St. Petersburg International Conference on Integrated Navigation Systems, 2021
[25] Jiménez-Martínez R, Kołodyński J, Troullinou C, Lucivero V G, Kong J, Mitchell M W 2018 Phys. Rev. Lett. 120 040503
Google Scholar
[26] Cheiney P, Fouche L, Templier S, Napolitano F, Battelier B, Bouyer P, Barrett B 2018 Phys. Rev. Appl. 10 034030
Google Scholar
[27] Wu B, Zhu D, Cheng B, Wu L, Wang K, Wang Z, Shu Q, Li R, Wang H, Wang X, Lin Q 2019 Opt. Express 27 11252
Google Scholar
[28] 吴彬, 程冰, 付志杰, 朱栋, 周寅, 翁堪兴, 王肖隆, 林强 2018 物理学报 67 190302
Google Scholar
Wu B, Cheng B, Fu Z-J, Zhu D, Zhou Y, Weng K X, Wang X L, Lin Q 2018 Acta Phys. Sin. 67 190302
Google Scholar
[29] Cheinet P, Canuel B, Dos Santos F P, Gauguet A, Yver-Leduc F, Landragin A 2008 IEEE Trans. Instrum. Meas. 57 1141
Google Scholar
[30] Zingerle P, Pail R, Gruber T, Oikonomidou X 2020 J. Geod. 94 1
Google Scholar
[31] Zhu D, Zhou Y, Wu B, Weng K, Wang K, Cheng B, Lin Q 2021 Appl. Opt. 60 7910
Google Scholar
[32] Gauguet A, Mehlstäubler T E, Lévèque T, Gouët J L, Chaibi O, Canuel B, Clairon A, Santos F P D, Landragin A 2008 Phys. Rev. A 78 4702
[33] Baumann H, Klingele E E, Marson I 2012 Geophys. Prospect. 60 361
Google Scholar
-
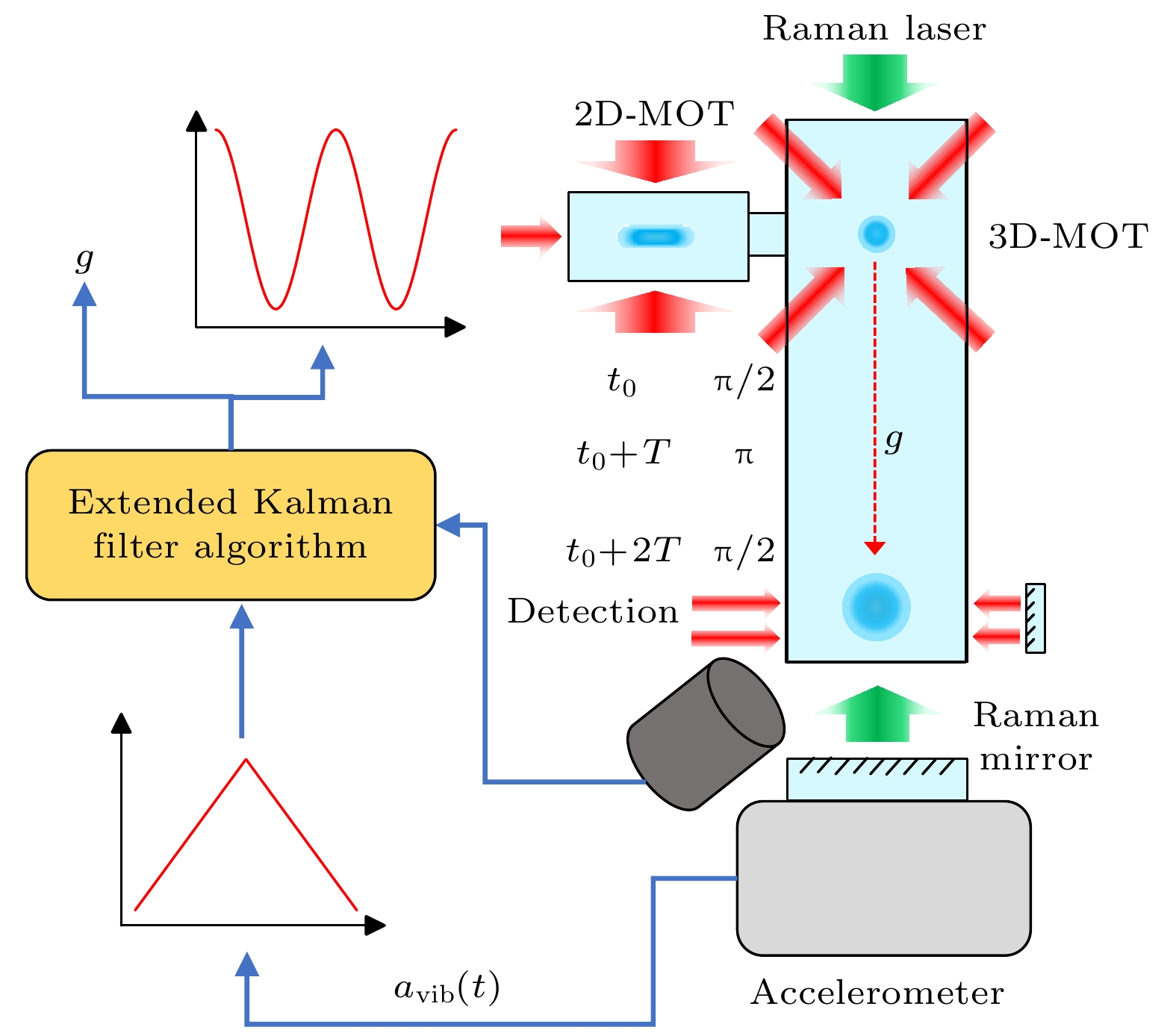
图 1 船载冷原子干涉式绝对重力动态测量原理
Fig. 1. The principle of absolute gravity dynamic measurement based on cold atom interferometer on ship.

图 2 船载绝对重力动态测量系统示意图
Fig. 2. Schematic diagram of marine dynamic absolute gravity measurement system.

图 3 可移动的原子重力仪实验室 (a)实验室内部仪器设备布局示意图; (b)可移动实验室实物图
Fig. 3. Transportable laboratory for atomic gravimeter: (a) Schematic diagram of the internal layout of instruments and equipments in the laboratory; (b) photo of the transportable laboratory.

图 4 绝对重力动态测量的航线与船速 (a)航行路线; (b)航行速度
Fig. 4. Route and ship speed of absolute gravity dynamic measurement: (a) Sailing route of the ship; (b) speed of the ship.

图 5 船载动态测量的振动环境与原子干涉条纹 (a)竖直方向振动加速度的功率谱密度(PSD); (b)原子干涉条纹
Fig. 5. The vibration environment and atomic interference fringes for shipborne dynamic measurements: (a) Power spectral density (PSD) of the vertical vibration acceleration; (b) atomic interference fringes.

图 7 通过不同算法获得的重力值的Allan偏差数据
Fig. 7. Allan deviation data of gravity values obtained by different algorithms.
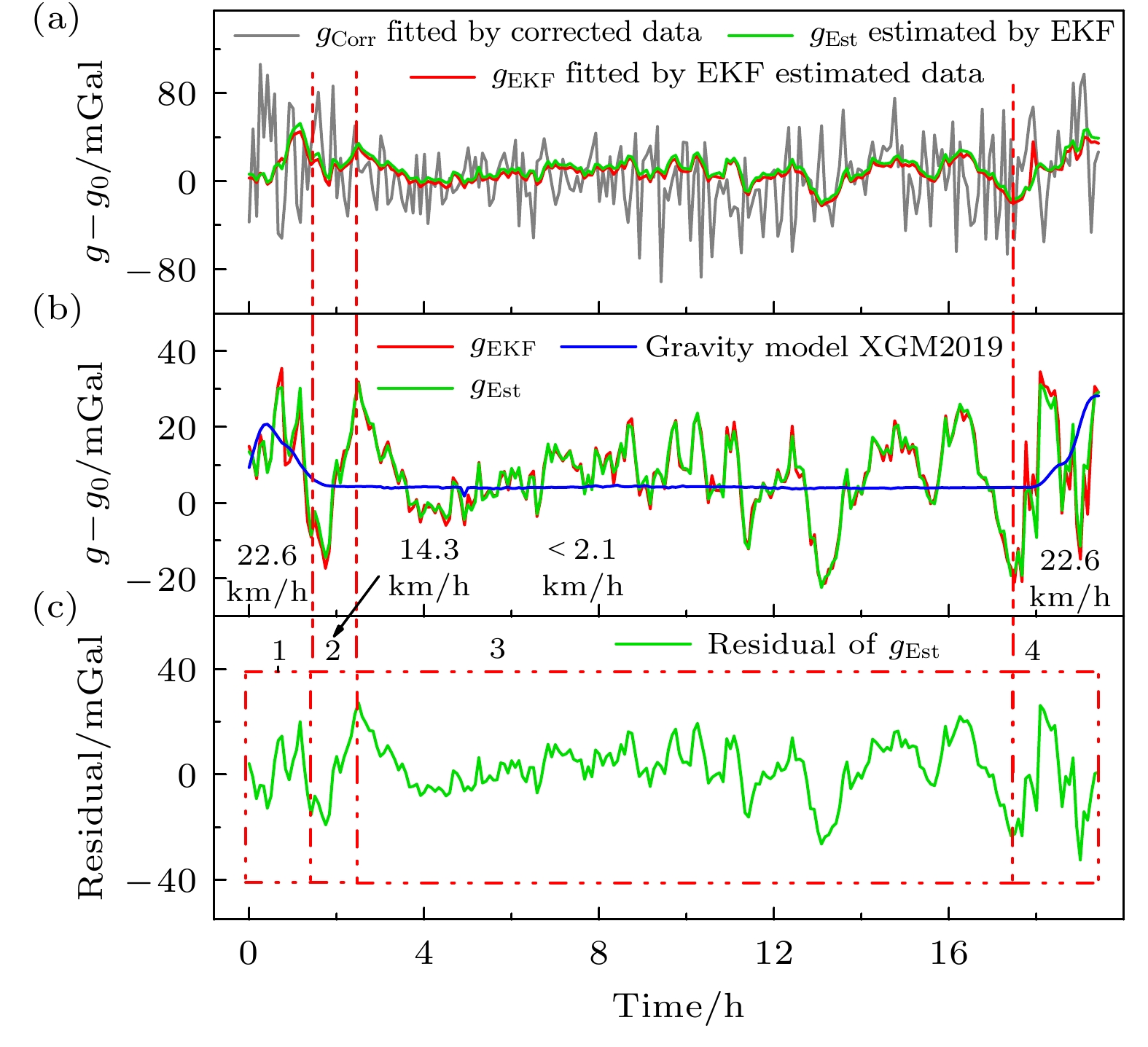
图 8 动态绝对重力数据处理结果 (a)使用不同算法获得的绝对重力值; (b)修正系统误差后的绝对重力值; (c)绝对重力值gEst与由重力模型计算的结果的残差数据
Fig. 8. Comparison of the absolute gravity data: (a) Absolute gravity values obtained by the different algorithms; (b) absolute gravity values obtained after correcting the systematic errors; (c) the residual data between the absolute gravity values gEst and the calculated results based on the gravity model.
-
[1] Kasevich M, Chu S 1992 Appl. Phys. B:Photophys. Laser Chem. 54 321
Google Scholar
[2] Peters A, Chung K Y, Chu S 2001 Metrologia 38 25
Google Scholar
[3] Bidel Y, Carraz O, Charriere R, Cadoret M, Zahzam N, Bresson A 2013 Appl. Phys. Lett. 102 144107
Google Scholar
[4] Ménoret V, Vermeulen P, Le Moigne N, Bonvalot S, Bouyer P, Landragin A, Desruelle B 2018 Sci. Rep. 8 1
[5] Fu Z, Wang Q, Wang Z, Wu B, Cheng B, Lin Q 2019 Chin. Opt. Lett. 17 011204
Google Scholar
[6] Huang P W, Tang B, Chen X, Zhong J Q, Xiong Z Y, Zhou L, Wang J, Zhan M S 2019 Metrologia 56 045012
Google Scholar
[7] Jiang Z, Palinkas V, Arias F E, et al. 2012 Metrologia 49 666
Google Scholar
[8] Farah T, Guerlin C, Landragin A, Bouyer P, Gaffet S, Dos Santos F P, Merlet S 2014 Gyroscopy and Navigation 5 266
Google Scholar
[9] Gillot P, Francis O, Landragin A, Dos Santos F P, Merlet S 2014 Metrologia 51 L15
Google Scholar
[10] Freier C, Hauth M, Schkolnik V, Leykauf B, Schilling M, Wziontek H, Scherneck H G, Muller J, Peters A 2016 J. Phys. Conf. Ser. 723 012050
Google Scholar
[11] Geiger R, Menoret V, Stern G, Zahzam N, Cheinet P, Battelier B, Villing A, Moron F, Lours M, Bidel Y, Bresson A, Landragin A, Bouyer P 2011 Nat. Commun. 2 474
Google Scholar
[12] Fu Z J, Wu B, Cheng B, Zhou Y, Weng K X, Zhu D, Wang Z Y, Lin Q 2019 Metrologia 56 025001
Google Scholar
[13] Wu X, Pagel Z, Malek B S, Nguyen T H, Zi F, Scheirer D S, Muller H 2019 Sci. Adv. 5 eaax0800
Google Scholar
[14] 吴彬, 周寅, 程冰, 朱栋, 王凯楠, 朱欣欣, 陈佩军, 翁堪兴, 杨秋海, 林佳宏, 张凯军, 王河林, 林强 2020 物理学报 69 060302
Google Scholar
Wu B, Zhou Y, Cheng B, Zhu D, Wang K N, Zhu X X, Chen P J, Weng K X, Yang Q H, Lin J H, Zhang K J, Wang H L, Lin Q 2020 Acta Phys. Sin. 69 060302
Google Scholar
[15] Wu S, Feng J, Li C, Su D, Wang Q, Hu R, Mou L 2021 J. Geod. 95 63
Google Scholar
[16] 程冰, 周寅, 陈佩军, 张凯军, 朱栋, 王凯楠, 翁堪兴, 王河林, 彭树萍, 王肖隆, 吴彬, 林强 2021 物理学报 70 040304
Google Scholar
Cheng B, Zhou Y, Chen P J, Zhang K J, Zhu D, Wang K N, Weng K X, Wang H L, Peng S P, Wang X L, Wu B, Lin Q 2021 Acta Phys. Sin. 70 040304
Google Scholar
[17] Bidel Y, Zahzam N, Bresson A, Blanchard C, Cadoret M, Olesen A V, Forsberg R 2020 J. Geod. 94 20
Google Scholar
[18] Bidel Y, Zahzam N, Blanchard C, Bonnin A, Cadoret M, Bresson A, Rouxel D, Lequentrec-Lalancette M F 2018 Nat. Commun. 9 627
Google Scholar
[19] Merlet S, Le Goueet J, Bodart Q, Clairon A, Landragin A, Dos Santos F P, Rouchon P 2009 Metrologia 46 87
Google Scholar
[20] Reif K, Gunther S, Yaz E, Unbehauen R 1999 IEEE Trans. Autom. Control 44 714
Google Scholar
[21] Kappl J J 1971 IEEE Trans. Aerosp. Electron. Syst. aes-7 79
[22] Sastry V A, Noton A R M 1971 IEEE Trans. Autom. Control 16 260
Google Scholar
[23] Canciani A, Raquet J 2012 Proceedings of the 2012 International Technical Meeting of The Institute of Navigation, 2012 pp151–185
[24] Tennstedt B, Schön S 2021 Proceedings of 28th St. Petersburg International Conference on Integrated Navigation Systems, 2021
[25] Jiménez-Martínez R, Kołodyński J, Troullinou C, Lucivero V G, Kong J, Mitchell M W 2018 Phys. Rev. Lett. 120 040503
Google Scholar
[26] Cheiney P, Fouche L, Templier S, Napolitano F, Battelier B, Bouyer P, Barrett B 2018 Phys. Rev. Appl. 10 034030
Google Scholar
[27] Wu B, Zhu D, Cheng B, Wu L, Wang K, Wang Z, Shu Q, Li R, Wang H, Wang X, Lin Q 2019 Opt. Express 27 11252
Google Scholar
[28] 吴彬, 程冰, 付志杰, 朱栋, 周寅, 翁堪兴, 王肖隆, 林强 2018 物理学报 67 190302
Google Scholar
Wu B, Cheng B, Fu Z-J, Zhu D, Zhou Y, Weng K X, Wang X L, Lin Q 2018 Acta Phys. Sin. 67 190302
Google Scholar
[29] Cheinet P, Canuel B, Dos Santos F P, Gauguet A, Yver-Leduc F, Landragin A 2008 IEEE Trans. Instrum. Meas. 57 1141
Google Scholar
[30] Zingerle P, Pail R, Gruber T, Oikonomidou X 2020 J. Geod. 94 1
Google Scholar
[31] Zhu D, Zhou Y, Wu B, Weng K, Wang K, Cheng B, Lin Q 2021 Appl. Opt. 60 7910
Google Scholar
[32] Gauguet A, Mehlstäubler T E, Lévèque T, Gouët J L, Chaibi O, Canuel B, Clairon A, Santos F P D, Landragin A 2008 Phys. Rev. A 78 4702
[33] Baumann H, Klingele E E, Marson I 2012 Geophys. Prospect. 60 361
Google Scholar

 下载:
下载:

计量
- 文章访问数: 9389
- PDF下载量: 219
- 被引次数: 0
