










-
传播速度是内孤立波的重要参数之一, 如何通过光学遥感图像准确快速地获得内孤立波速度是目前需要解决的重要科学问题. 本文在实验室建立了模拟内孤立波光学遥感成像系统, 开展了系列综合实验, 获取实验数据库, 并利用最小二乘法和支持向量机两种方法分别建立基于单景光学遥感图像的内孤立波速度反演模型. 利用中国南海的MODIS图像和GF-4图像数据对速度反演模型进行精度检验. 研究结果表明: 最小二乘法内孤立波速度反演模型能够给出回归方程, 物理意义更为直观, 且在300—399 m水深范围精度更高, 而支持向量机内孤立波速度反演模型在水深400—1200 m和83—299 m的范围内精度高. 因此两种内孤立波速度反演模型各有优势, 都可以应用于真实海洋中内孤立波速度的反演.The propagation speed is one of the important parameters of the internal solitary wave (ISW). How to obtain the ISW speed through optical remote sensing images accurately and quickly is an important problem to be solved. In this paper, we simulate ISW optical remote sensing imaging, obtain an experimental database, and build the ISW speed inversion model based on a single-scene optical remote sensing image by using the least squares method and the support vector machine. The accuracy of the ISW speed inversion model is tested by using MODIS Image and GF-4 image data of the South China Sea. The study results are shown below. The least squares ISW speed inversion model can give the regression equation, which is more intuitive and has less accuracy in the water depth ranging from 300 m to 399 m, while the support vector machine ISW speed inversion model has high accuracy in the water depth ranging from 400 m to 1200 m and from 83 m to 299 m. Therefore, the two kinds of ISW speed inversion models have different advantages, and can be applied to the inversion of the ISW speed in the real ocean.
-
Keywords:
- internal solitary wave /
- optical remote sensing /
- propagation speed /
- least square method /
- support vector machine
[1] Yang Y C, Huang X D, Zhao W, Zhou C, Huang S W, Zhang Z W, Tian J W 2021 J. Phys. Oceanogr. 51 3609
 Google Scholar
Google Scholar
[2] 关晖, 苏晓冰, 田俊杰 2011 计算力学学报 28 60
Google Scholar
Guan H, Su X B, Tian J W 2011 Chin. J. Comp. Mech. 28 60
Google Scholar
[3] 刘国涛, 尚晓东, 陈桂英, 卢著敏, 刘良钢, 程晓波 2007 中山大学学报(自然科学版) 46 167
Google Scholar
Liu G T, Shang X D, Chen G Y, Lu Z M, Liu L G, Cheng X B 2007 Acta Sci. Natur. Univ. Sunyatseni 46 167
Google Scholar
[4] 汪超, 杜伟, 杜鹏, 李卓越, 赵森, 胡海豹, 陈效鹏, 黄潇 2022 力学学报 54 1921
Google Scholar
Wang C, Du W, Du P, Li Z Y, Zhao S, Hu H B, Chen X P, Huang X 2022 Chin. J. Theor. App. Mech. 54 1921
Google Scholar
[5] 汪超, 杜伟, 李广华, 杜鹏, 赵森, 李卓越, 陈效鹏, 胡海豹 2022 中国舰船研究 17 102
Google Scholar
Wang C, Du W, LI G H, Du P, Zhao S, Li Z Y, Chen X P, Hu H B 2022 Chin. J. Ship Res. 17 102
Google Scholar
[6] 刘秀全, 陈国明, 畅元江, 姬景奇, 傅景杰, 张浩 2017 石油学报 38 1448
Google Scholar
Liu X Q, Chen G M, Chang Y J, Ji J Q, Fu J J, Zhang H 2017 Acta Petro. Sin. 38 1448
Google Scholar
[7] Farrar J T, Zappa C J, Weller R A, Jessup A T 2007 J. Geophys. Res-Oceans 112 1
Google Scholar
[8] 蔡树群, 何建玲, 谢皆烁 2011 地球科学进展 26 703
Google Scholar
Cai S Q, He J L, Xie J H 2011 Adv. Earth Sci. 26 703
Google Scholar
[9] 黄晓冬, 赵玮 2014 中国海洋大学学报(自然科学版) 44 19
Google Scholar
Huang X D, Zhao W 2014 Period. Ocean Univ. China 44 19
Google Scholar
[10] Cai S Q, Xie J S, He J L 2012 Surv. Geophys. 33 927
Google Scholar
[11] 张涛, 张旭东 2020 海洋与湖沼 51 991
Google Scholar
Zhang T, Zhang X D 2020 Oceanologia Limnologia Sin. 51 991
Google Scholar
[12] 邝芸艳, 王亚龙, 宋海斌, 关永贤, 范文豪, 龚屹, 张锟 2021 地球物理学报 64 597
Google Scholar
Kuang Y Y, Wang Y L, Song H B, Guan Y X, Fan W H, Ging Y, Zhang K 2021 Chin. J. Geophys. 64 597
Google Scholar
[13] 孙丽娜, 张杰, 孟俊敏, 崔伟 2022 海洋学报 44 137
Google Scholar
Sun L N, Zhang J, Meng J M, Cui W 2022 Acta. Oceanol. Sin. 44 137
Google Scholar
[14] Alford M H, Lien R C, Simmons H, Klymak J, Ramp S, Yang Y J, Tang D, Chang M H 2010 J. Phys. Oceanogr. 40 1338
Google Scholar
[15] Huang X D, Chen Z H, Zhao W, Zhang Z W, Zhou C, Yang Q X, Tian J W 2016 Sci. Rep-UK. 6 30041
Google Scholar
[16] 吕海滨, 何宜军, 申辉 2012 海洋科学 36 98
Google Scholar
LÜ H B, He Y J, Shen H 2012 Marine Sci. 36 98
Google Scholar
[17] Hong D B, Yang C S, Ouchi K 2015 Remote. Sens. Lett. 6 448
Google Scholar
[18] Meetei C, Nadimpalli J R, Dash M K, Barskar H 2020 Remote. Sens. Environ. 252 112123
Google Scholar
[19] Sun L N, Zhang J, Meng J M 2021 J. Oceanol. Limnol 39 14
Google Scholar
[20] Zhang M, Wang J, Li Z X, Liang K D, Chen X 2022 J. Geophys. Res-Oceans. 2 127
Google Scholar
[21] Wang J, Zhang M, Mei Y, Lu K X, Chen X 2020 IEEE. Geosci. Remote. S. 99 1
Google Scholar
-
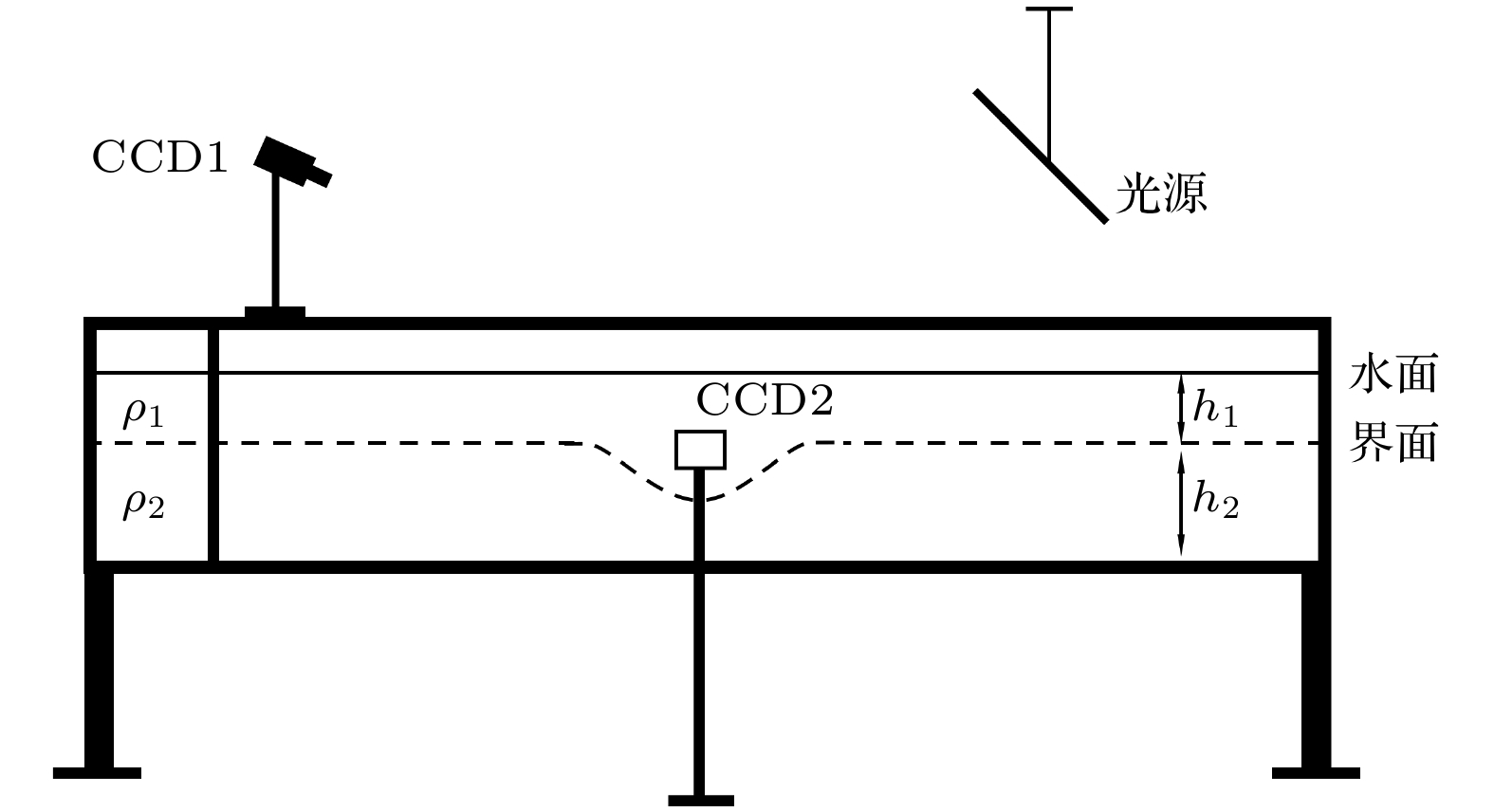
图 1 内孤立波光学遥感仿真平台结构示意图
Fig. 1. Schematic diagram of simulation platform of the internal solitary wave optical remote sensing.
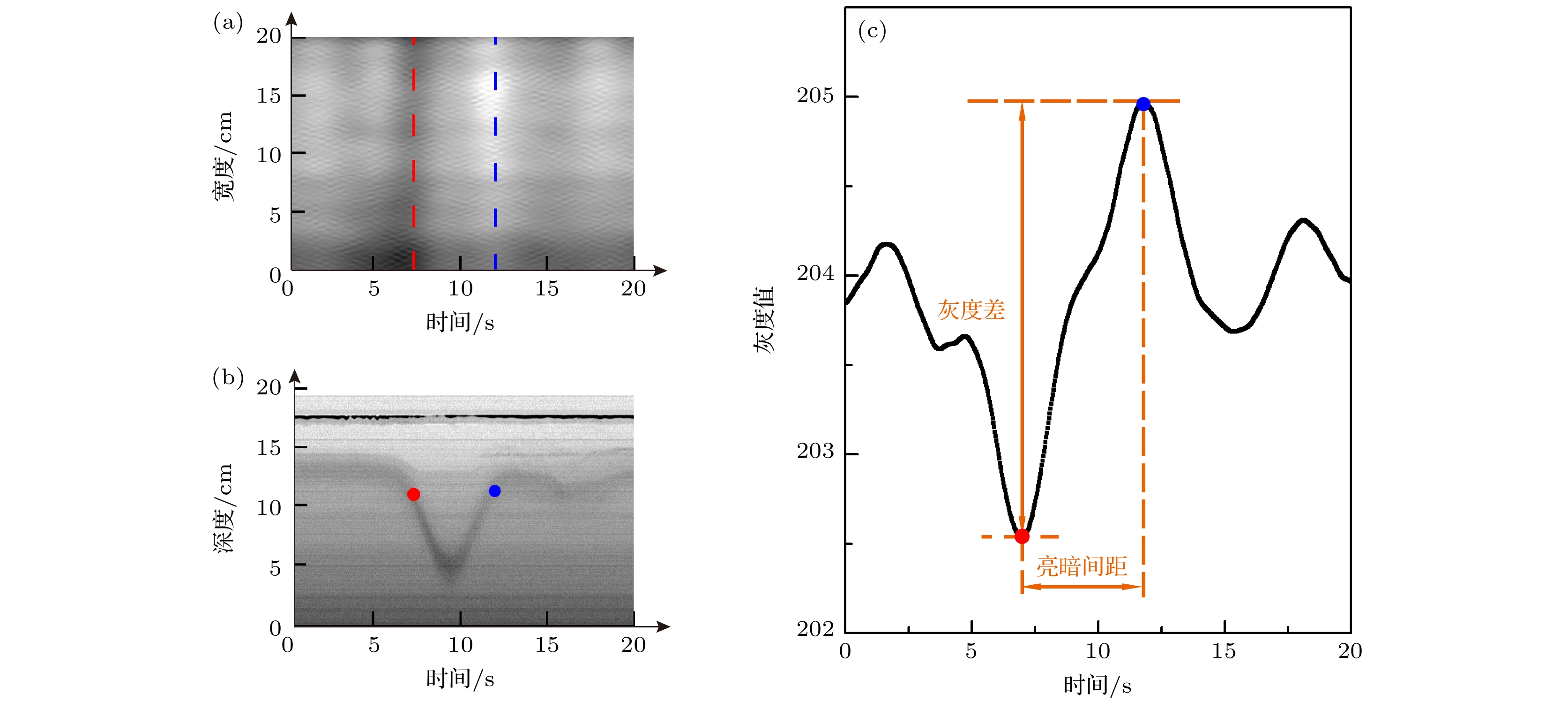
图 2 实验室内孤立波参数示意图 (a) 内孤立波仿真遥感图像; (b)内孤立波波形图; (c)内孤立波灰度剖面图
Fig. 2. Schematic diagram of the internal solitary wave parameters in the laboratory: (a) Simulated remote sensing images; (b) the internal solitary wave waveform diagram; (c) the gray scale profiles.

图 3 最小二乘法回归方程反演结果散点图 (a)最高幂次为2次方; (b)最高幂次为3次方
Fig. 3. Scatter plot of the inversion results of the least squares regression equation: (a) With the highest power of 2; (b) with the highest power of 3.
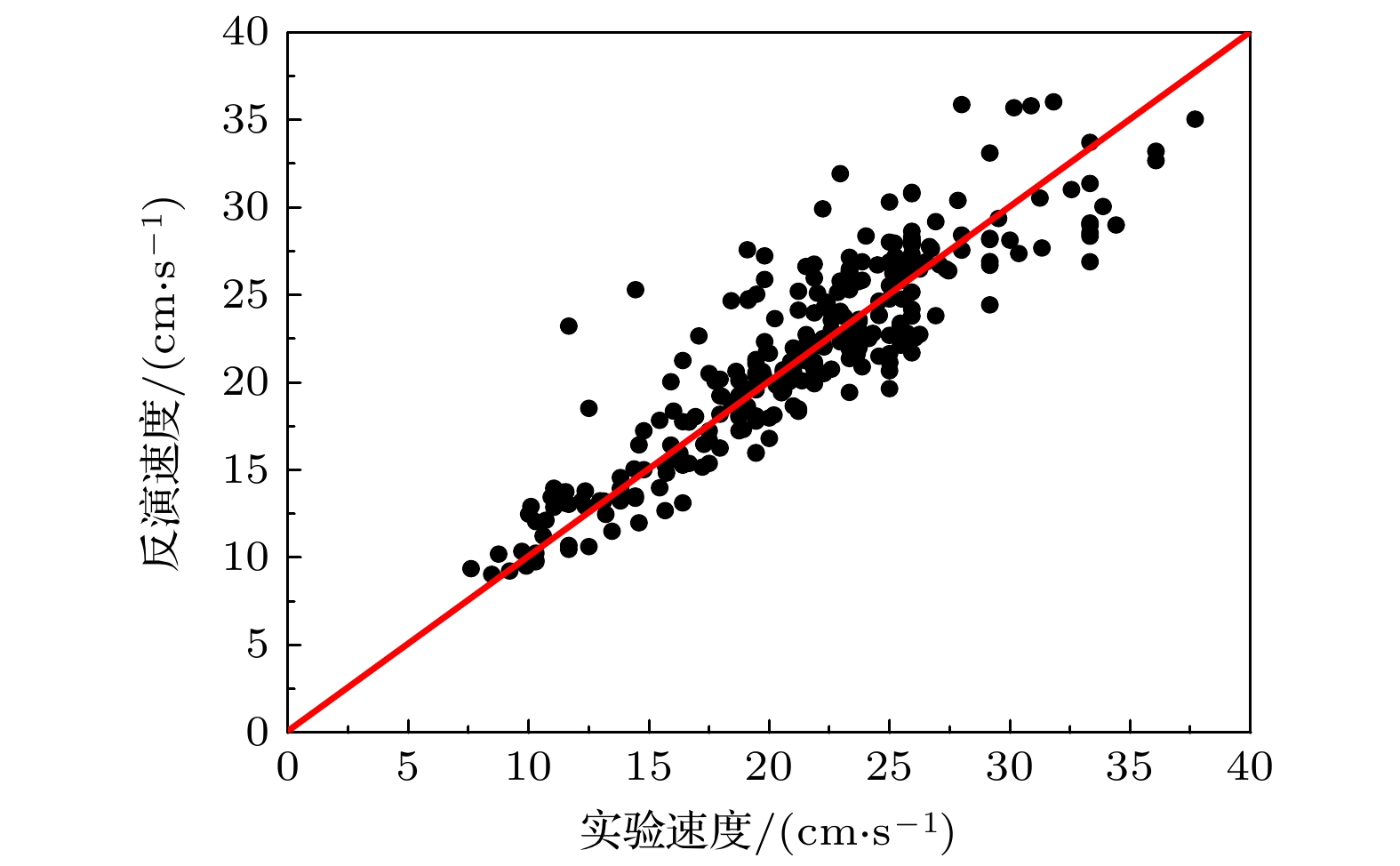
图 4 SVR内孤立波速度反演模型测试集散点图
Fig. 4. Scatter plot of test set of solitary wave speed inversion model in SVR.
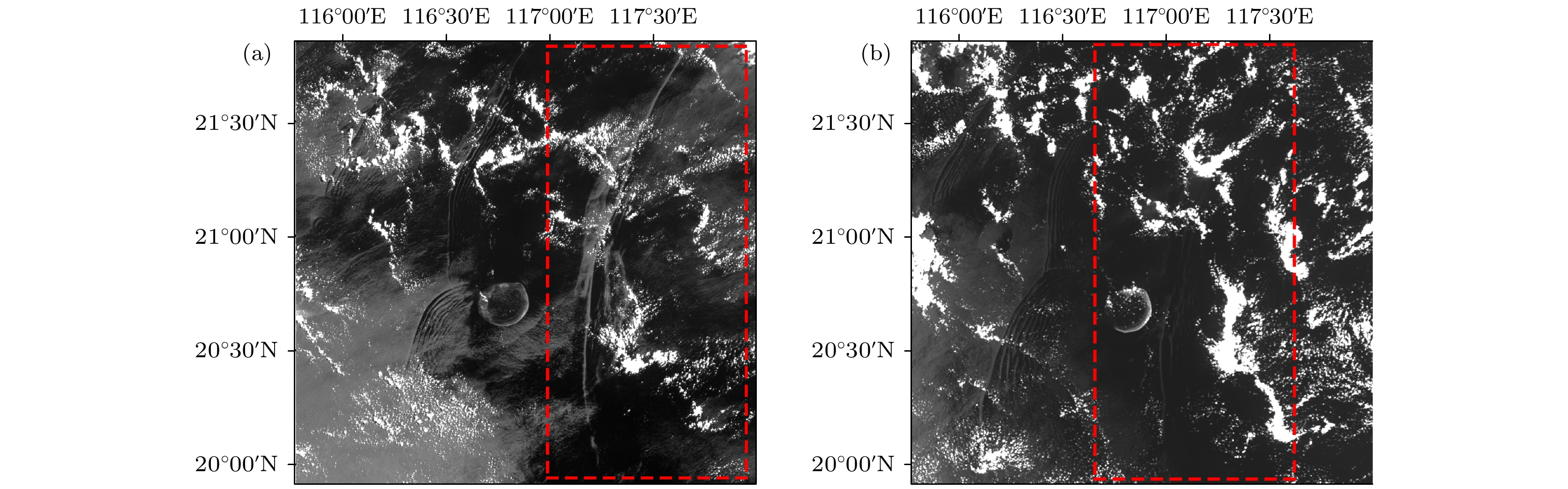
图 5 多时间图像法示意图 (a) 2021年5月25日10:43 南海海域GF4光学遥感图像; (b) 2021年5月25日13:40南海海域 MODIS光学遥感图像
Fig. 5. Schematic diagram of the multi-time image method: (a) An optical remote sensing image of GF-4 in the South China Sea at 10:43 on May 25, 2021; (b) the MODIS optical remote sensing image of the South China Sea area is at 13:40 on May 25, 2021.
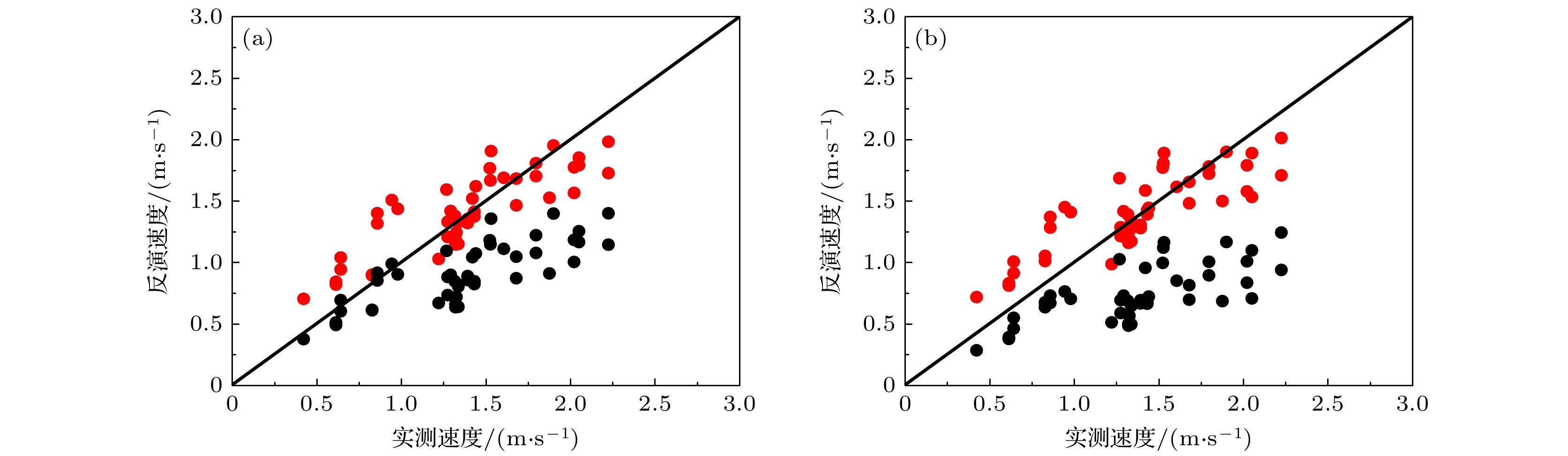
图 6 最小二乘法内孤立波速度反演模型精度散点图 (a)校正前后最高幂次为2次方的最小二乘法回归方程的反演结果散点图, 黑色散点为校正前模型结果, 红色散点为校正后模型结果; (b)校正前后最高幂次为3次方的最小二乘法回归方程的反演结果散点图, 黑色散点为校正前模型结果, 红色散点为校正后模型结果.
Fig. 6. Scatter plot of the solitary wave speed inversion model accuracy within least squares. (a) The scatter plot of inversion results of least squares regression equation with the highest power of 2 before and after correction. The black scatters are the model results before correction, and the red scatters are the model results after correction. (b) The scatter plot of the inversion results of the least squares regression equation with the highest power of 3 before and after correction. The black scatters are the model results before correction, and the red scatters are the model results after correction.
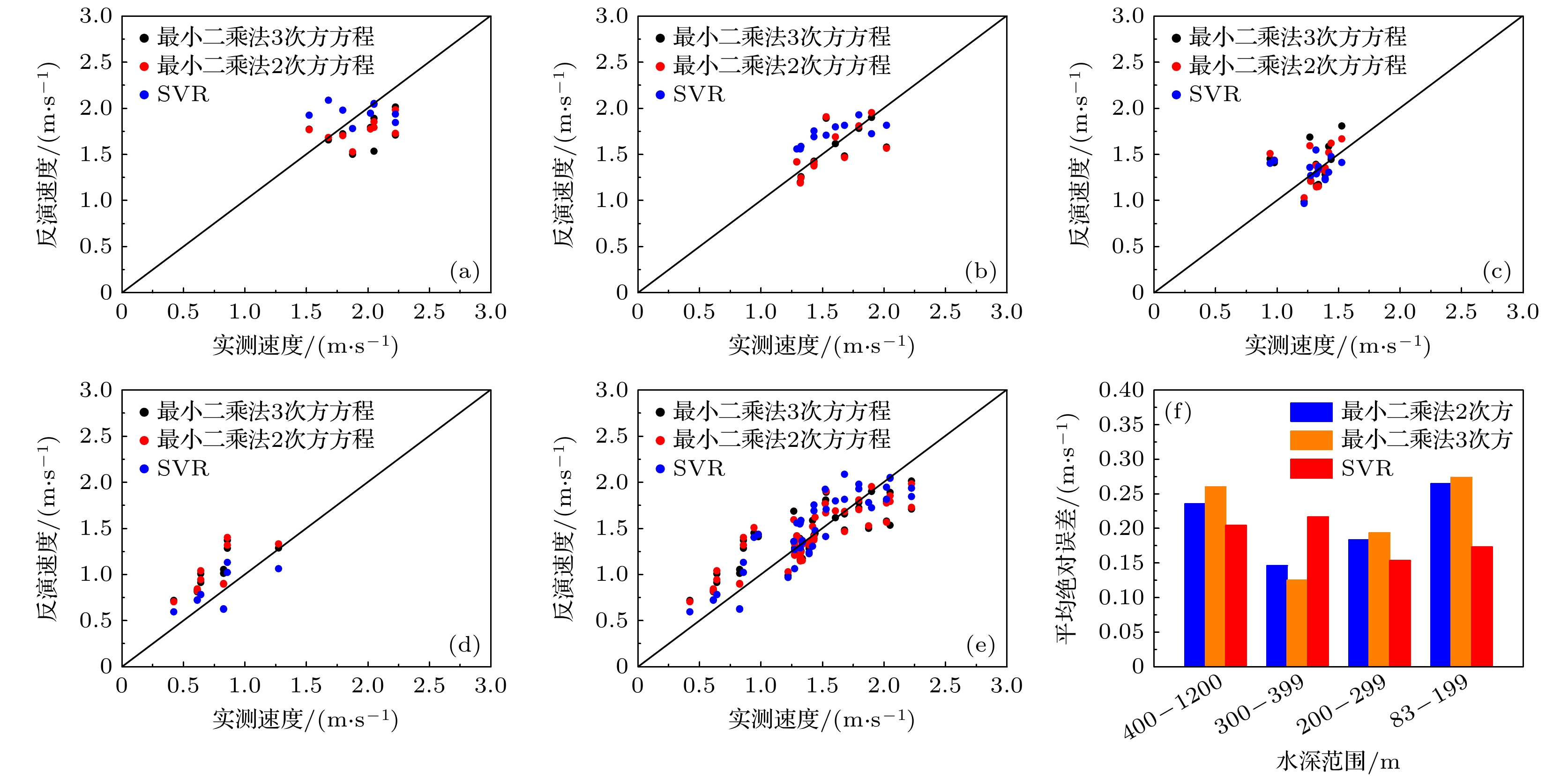
图 7 内孤立波速度反演模型精度验证图 (a)—(d) 3种反演模型对400—1200 m、300—399 m、200—299 m、83—199 m水深范围的内孤立波的速度反演结果散点图; (e) 3种反演模型对83—1200 m水深范围的内孤立波的速度反演结果散点图; (a)—(e) 黑色散点为最高幂次为2次方的最小二乘法反演模型结果, 红色散点为最高幂次为3次方的最小二乘法反演模型结果, 蓝色散点为SVR反演模型结果; (f) 三种反演模型对400—1200 m、300—399 m、200—299 m、83—199 m水深范围的内孤立波的速度反演结果的平均绝对误差柱状图
Fig. 7. Precision validation diagram of the internal solitary wave velocity inversion model: (a)–(d) Scatter plots of inversion results of three inversion models for internal solitary waves speed in water depths of 400–1200 m, 300–399 m, 200–299 m and 83–199 m, respectively; (e) scatter plot of inversion results of three inversion models for internal solitary waves speed in water depths of 83–1200 m; (a)–(e) the black scattered points are the results of least squares inversion model with the highest power of 2, the red scattered points are the results of least squares inversion model with the highest power of 3, and the blue scattered points are the results of SVR inversion model; (f) the average absolute error histogram of the inversion results of the three inversion models for internal solitary waves speed in the water depths of 400–1200 m, 300–399 m, 200–299 m and 83–199 m.
表 1 内孤立波实验设计表
Table 1. Design table of internal solitary wave experiment.
组数 总水深/cm 上层水深/cm 下层水深/cm 上层密度/(g·cm–3) 下层密度/(g·cm–3) 塌陷高度/cm 1 44 4 40 1.00 1.08 5, 10, 15, 20 2 44 5 39 1.00 1.08 5, 10, 15, 20 3 44 10 34 1.00 1.08 5, 10, 15, 20 4 44 12 32 1.00 1.08 5, 10, 15, 20 5 65 5 60 1.00 1.04 5, 10, 15, 20 6 65 5 60 1.01 1.04 5, 10, 15, 20 7 65 5 60 1.02 1.04 5, 10, 15, 20 8 65 10 55 1.00 1.04 5, 10, 15, 20, 25 9 68 8.5 59.5 1.00 1.04 5, 10, 15, 20 10 68 8.5 59.5 1.00 1.06 5, 10, 15, 20 11 68 8.5 59.5 1.00 1.08 5, 10, 15, 20 … … … … … … …  下载: 导出CSV
下载: 导出CSV
表 2 内孤立波速度反演模型精度验证表
Table 2. Precision verification table of internal solitary wave velocity inversion model.
水深
范围/m数据 V/
(m·s–1)VZ2/
(m·s–1)AEz2/
(m·s–1)VZ3/
(m·s–1)AEz3
(m·s–1)VSVR/
(m·s–1)AESVR/
(m·s–1)400—1200 数据1 2.22 1.73 0.49 1.71 0.51 1.85 0.37 数据2 2.05 1.85 0.20 1.89 0.16 2.04 0.01 … … … … … … … … 数据9 1.52 1.77 0.25 1.77 0.25 1.93 0.41 300—399 数据1 1.60 1.69 0.09 1.62 0.02 1.80 0.20 数据2 1.90 1.95 0.05 1.90 0 1.72 0.18 … … … … … … … … 数据11 1.43 1.38 0.05 1.39 0.04 1.69 0.26 200—299 数据1 1.32 1.38 0.06 1.39 0.07 1.55 0.23 数据2 1.44 1.62 0.18 1.45 0.01 1.48 0.04 … … … … … … … … 数据14 1.22 1.03 0.19 0.99 0.23 0.97 0.25 83—199 数据1 0.86 1.40 0.54 1.37 0.51 1.13 0.27 数据2 1.27 1.33 0.06 1.29 0.02 1.06 0.21 … … … … … … … … 数据10 0.83 0.90 0.07 1.01 0.18 0.62 0.21 注: V表示遥感实测速度, VZ2表示最小二乘法二次方速度反演模型反演值, VZ3表示最小二乘法三次方速度反演模型反演值, VSVR表示SVR速度反演模型反演值, AEZ2表示VZ2与V的绝对误差, AEZ3 表示VZ3与V的绝对误差, AESVR表示VSVR与V的绝对误差.
下载: 导出CSV
-
[1] Yang Y C, Huang X D, Zhao W, Zhou C, Huang S W, Zhang Z W, Tian J W 2021 J. Phys. Oceanogr. 51 3609
Google Scholar
[2] 关晖, 苏晓冰, 田俊杰 2011 计算力学学报 28 60
Google Scholar
Guan H, Su X B, Tian J W 2011 Chin. J. Comp. Mech. 28 60
Google Scholar
[3] 刘国涛, 尚晓东, 陈桂英, 卢著敏, 刘良钢, 程晓波 2007 中山大学学报(自然科学版) 46 167
Google Scholar
Liu G T, Shang X D, Chen G Y, Lu Z M, Liu L G, Cheng X B 2007 Acta Sci. Natur. Univ. Sunyatseni 46 167
Google Scholar
[4] 汪超, 杜伟, 杜鹏, 李卓越, 赵森, 胡海豹, 陈效鹏, 黄潇 2022 力学学报 54 1921
Google Scholar
Wang C, Du W, Du P, Li Z Y, Zhao S, Hu H B, Chen X P, Huang X 2022 Chin. J. Theor. App. Mech. 54 1921
Google Scholar
[5] 汪超, 杜伟, 李广华, 杜鹏, 赵森, 李卓越, 陈效鹏, 胡海豹 2022 中国舰船研究 17 102
Google Scholar
Wang C, Du W, LI G H, Du P, Zhao S, Li Z Y, Chen X P, Hu H B 2022 Chin. J. Ship Res. 17 102
Google Scholar
[6] 刘秀全, 陈国明, 畅元江, 姬景奇, 傅景杰, 张浩 2017 石油学报 38 1448
Google Scholar
Liu X Q, Chen G M, Chang Y J, Ji J Q, Fu J J, Zhang H 2017 Acta Petro. Sin. 38 1448
Google Scholar
[7] Farrar J T, Zappa C J, Weller R A, Jessup A T 2007 J. Geophys. Res-Oceans 112 1
Google Scholar
[8] 蔡树群, 何建玲, 谢皆烁 2011 地球科学进展 26 703
Google Scholar
Cai S Q, He J L, Xie J H 2011 Adv. Earth Sci. 26 703
Google Scholar
[9] 黄晓冬, 赵玮 2014 中国海洋大学学报(自然科学版) 44 19
Google Scholar
Huang X D, Zhao W 2014 Period. Ocean Univ. China 44 19
Google Scholar
[10] Cai S Q, Xie J S, He J L 2012 Surv. Geophys. 33 927
Google Scholar
[11] 张涛, 张旭东 2020 海洋与湖沼 51 991
Google Scholar
Zhang T, Zhang X D 2020 Oceanologia Limnologia Sin. 51 991
Google Scholar
[12] 邝芸艳, 王亚龙, 宋海斌, 关永贤, 范文豪, 龚屹, 张锟 2021 地球物理学报 64 597
Google Scholar
Kuang Y Y, Wang Y L, Song H B, Guan Y X, Fan W H, Ging Y, Zhang K 2021 Chin. J. Geophys. 64 597
Google Scholar
[13] 孙丽娜, 张杰, 孟俊敏, 崔伟 2022 海洋学报 44 137
Google Scholar
Sun L N, Zhang J, Meng J M, Cui W 2022 Acta. Oceanol. Sin. 44 137
Google Scholar
[14] Alford M H, Lien R C, Simmons H, Klymak J, Ramp S, Yang Y J, Tang D, Chang M H 2010 J. Phys. Oceanogr. 40 1338
Google Scholar
[15] Huang X D, Chen Z H, Zhao W, Zhang Z W, Zhou C, Yang Q X, Tian J W 2016 Sci. Rep-UK. 6 30041
Google Scholar
[16] 吕海滨, 何宜军, 申辉 2012 海洋科学 36 98
Google Scholar
LÜ H B, He Y J, Shen H 2012 Marine Sci. 36 98
Google Scholar
[17] Hong D B, Yang C S, Ouchi K 2015 Remote. Sens. Lett. 6 448
Google Scholar
[18] Meetei C, Nadimpalli J R, Dash M K, Barskar H 2020 Remote. Sens. Environ. 252 112123
Google Scholar
[19] Sun L N, Zhang J, Meng J M 2021 J. Oceanol. Limnol 39 14
Google Scholar
[20] Zhang M, Wang J, Li Z X, Liang K D, Chen X 2022 J. Geophys. Res-Oceans. 2 127
Google Scholar
[21] Wang J, Zhang M, Mei Y, Lu K X, Chen X 2020 IEEE. Geosci. Remote. S. 99 1
Google Scholar

 下载:
下载:
计量
- 文章访问数: 7722
- PDF下载量: 82
- 被引次数: 0
