










-
为了充分考虑介质运动对声传播的影响, 建立了一种利用高斯波束法求解亚音速运动介质中的声传播问题的模型. 该模型基于高频近似任意马赫数的速度势函数亥姆霍兹方程, 采用波束追踪方法, 推导了运动介质中的动态射线方程组, 进而将偏微分方程转换成常微分方程组的形式. 理论表明运动介质中波束的扩展更为复杂, 并且声线管束内的能量不一定守恒. 将该模型应用于标准问题、水平分层大气次声三维远距离传播问题和墨西哥湾流流域的声传播问题, 仿真结果表明, 相比于常用的N×2D近似计算方法, 运动介质中的高斯波束追踪法充分考虑了介质运动的影响, 特别是横风的作用, 可以更加精确地计算运动介质中的三维声场; 尽管海流的马赫数很小, 但是同样会定量地改变声传播, 影响会聚区位置, 在一些区域考虑海流和不考虑海流的计算结果相差5 dB 以上.The study of sound propagation in moving medium is important in various fields, such as atmospheric sound and underwater acoustics. To address this problem, a three-dimensional Gaussian beam tracing model is developed for subsonic moving medium, based on the Helmholtz equation of velocity potential for high-frequency sound wave in a moving medium with arbitrary Mach numbers. The dynamic ray equations in the moving medium are derived by using the beam tracing method, and further the partial differential equation is transformed into ordinary differential equations, so as to be able to more efficiently and accurately calculate the three-dimensional sound field in the moving medium. The Gaussian beam tracing method reveals that the expansion of the beam in a moving medium is more complex than in a static medium, and the energy in the ray tube is not necessarily conserved. The model is applied to several problems, including point source sound propagation in a semi-infinite homogeneous medium, three-dimensional long-range sound propagation in horizontally layered atmospheres, and three-dimensional sound propagation in the Gulf Stream. The results of the point source sound propagation problem in the semi-infinite homogeneous medium verify the effectiveness and accuracy of the model. The results of the atmospheric sound propagation problem indicate that compared with the commonly used N × 2D method, the three-dimensional Gaussian beam tracing in a moving medium fully considers the effect of medium motion, especially the effect of crosswind, and can calculate the sound pressure field more accurately. Although the Mach number of the ocean current is very small, its effect cannot be ignored. The ocean current can quantitatively change the sound propagation mode and affect the convergence zone position. In some areas, the difference between calculation results with and without considering the ocean current is more than 5 dB. Moreover, the deviation of rays caused by lateral flow is much smaller, and even in the areas with complex terrain, the deviation becomes more obvious only after being reflected by the interface. Moreover, the influence of lateral flow on sound propagation is much smaller than that caused by flow velocity parallel to the propagation direction. In conclusion, the developed Gaussian beam tracing method provides an accurate and efficient approach for solving the sound propagation problem in subsonic moving media.
-
Keywords:
- Gaussian beam tracing /
- subsonic moving medium /
- atmospheric sound propagation /
- underwater sound propagation
[1] Kirby R 2020 J. Acoust. Soc. Am. 148 3737
 Google Scholar
Google Scholar
[2] Hassan S E 2021 Recent Trends in Naval Engineering Research (Cham: Springer) p65
[3] Franke S J, Swenson G W 1989 Appl. Acoust. 27 203
Google Scholar
[4] Elisseeff P, Schmidt H 1996 J. Acoust. Soc. Am. 99 2524
Google Scholar
[5] Ostashev V E, Wilson D K, Muhlestein M B 2020 J. Acoust. Soc. Am. 147 3969
Google Scholar
[6] Wilson D K, Shaw M J, Ostashev V E, Muhlestein M B, Alter R E, Swearingen M E, McComas S L 2022 J. Acoust. Soc. Am. 151 138
Google Scholar
[7] Zabotin N A, Godin O A, Sava P C, Zabotina L Y 2012 J. Comput. Acoust. 20 1250009
Google Scholar
[8] Zabotin N A, Godin O A, Sava P C, Zabotina L Y 2014 J. Comput. Acoust. 22 1450002
Google Scholar
[9] Blokhintsev D I 1956 Ph. D. Dissertation (Providence: Brown University)
[10] Jensen F B, Kuperman W A, Porter M B, Schmidt H 2011 Computational Ocean Acoustics (2nd Ed.) (New York: Springer) pp175–179
[11] Ostashev V E, Wilson D K 2015 Acoustics in Moving Inhomogeneous Media (2nd Ed.) (Boca Raton: CRC Press) p11, p96, pp117–119, pp377–386
[12] Porter M B, Bucker H P 1987 J. Acoust. Soc. Am. 82 1349
Google Scholar
[13] Gabillet Y, Schroeder H, Daigle G A, L’Espérance A 1993 J. Acoust. Soc. Am. 93 3105
Google Scholar
[14] Porter M B 2019 J. Acoust. Soc. Am. 146 2016
Google Scholar
[15] Červený V, Pšenčík I 1983 J. Geophys. 53 1
[16] Popov M M, Pšenčík I, Červeny V 1978 Stud. Geophys. Geod. 22 248
Google Scholar
[17] Mo Q, Yeh H, Lin M, Manocha D 2017 J. Acoust. Soc. Am. 141 2289
Google Scholar
[18] Fuerkaiti Y, Casalino D, Acallone F, Ragni 2022 28th AIAA/CEAS Aeroacoustics 2022 Conference Southampton, UK, June 14–17, 2022 p1
[19] 杨训仁, 陈宇 2007 大气声学 (第二版) (北京: 科学出版社) 第44—48页
Yang X R, Chen Y 2007 Atmospheric Acoustics (2nd Ed.) (Beijing: Science Press) pp44–48
[20] Pierce A D 2019 Acoustics: an Introduction to Its Physical Principles and Applications (3rd Ed.) (New York: Springer) pp427–432
[21] Červený V, Hron F 1980 Bull. Seismol. Soc. Am. 70 47
Google Scholar
[22] Schubert L K 1972 J. Acoust. Soc. Am. 51 439
Google Scholar
[23] 程建春 2012 声学原理 (北京: 科学出版社) 第657—660页
Cheng J C 2012 Acoustic Principle (Beijing: Science Press) pp657–660
[24] Ostashev V E, Wilson D K, Liu L, Aldridge D F, Symons N P, Marlin D H 2005 J. Acoust. Soc. Am. 117 503
Google Scholar
[25] Assink J D, Waxler R, Drob D 2012 J. Geophys. Res.: Atmos. 117 D01110
Google Scholar
[26] Pichon A L, Blanc E, Drob D, Lambotte S, Dessa J X, Lardy M, Bani P, Vergniolle S 2005 J. Geophys. Res.: Atmos. 110 D13106
Google Scholar
[27] 程巍, 滕鹏晓, 吕君, 姬培锋, 戴翊靖 2021 物理学报 70 244203
Google Scholar
Cheng W, Teng P X, Lü J, Ji P F, Dai Y J 2021 Acta Phys. Sin. 70 244203
Google Scholar
[28] University of Wyoming, Department of Atmospheric Sciences. http://weather.uwyo.edu/upperair/sounding/ [2022-01-22]
[29] Pichon A L, Ceranna L, Vergoz J 2012 J. Geophys. Res. 117 D05121
Google Scholar
[30] Evers L G, Geyt A R J, Smets P, Frick J T 2012 J. Geophys. Res. 117 D06120
Google Scholar
[31] Godin O A, Mikhin D Y, Molchanov S Y 1993 Izv. Akad. Nauk. Fiz. Atmos. Okeana 29 194
[32] Godin O A 2002 J. Acoust. Soc. Am. 112 1269
Google Scholar
[33] Franchi E R, Jacobson M J 1973 J. Acoust. Soc. Am. 54 1302
Google Scholar
[34] Franchi E R, Jacobson M J 1973 J. Acoust. Soc. Am. 53 835
Google Scholar
[35] Stallworth L A, Jacobson M J 1970 J. Acoust. Soc. Am. 48 382
Google Scholar
[36] 张泽众, 骆文于, 庞哲, 周益清 2019 物理学报 68 204302
Google Scholar
Zhang Z Z, Luo W Y, Pang Z, Zhou Y Q 2019 Acta Phys. Sin. 68 204302
Google Scholar
[37] Henrick R F, Siegmann W L, Jacobson M J 1977 J. Acoust. Soc. Am. 62 860
Google Scholar
[38] Henrick R F, Jacobson M J, Siegmann W L 1980 J. Acoust. Soc. Am. 67 121
Google Scholar
[39] Grigor’eva N S, Yavor M I 1986 Sov. Phys. Acoust. 32 482
[40] Copernicuse https://www.copernicus.eu/en [2022-1-30]
[41] Coppens A B 1981 J. Acoust. Soc. Am. 69 862
Google Scholar
-

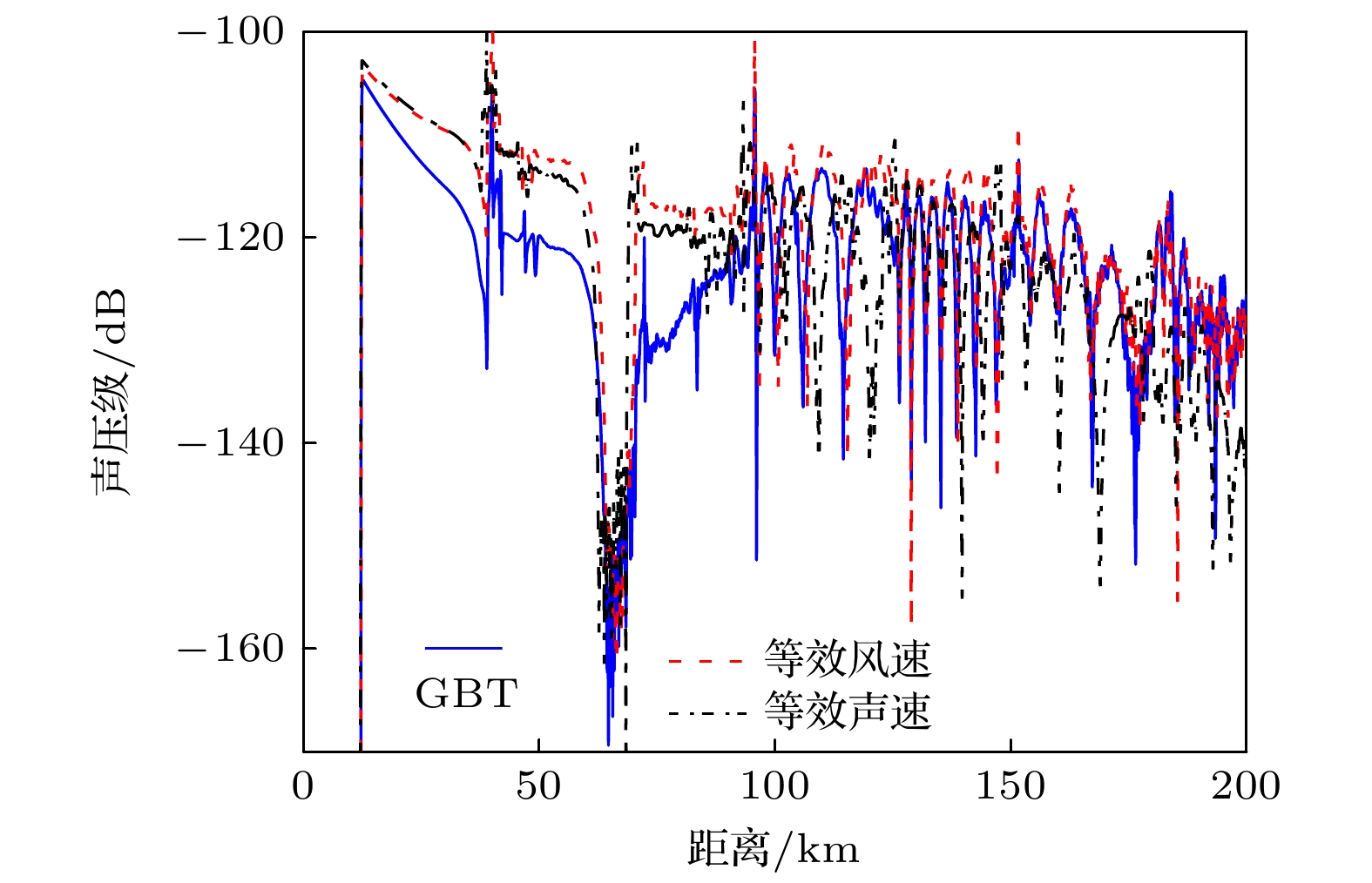
图 1 20 m高度顺逆流声压级曲线
Fig. 1. Sound pressure level curve of upwind and downwind at 20 m height
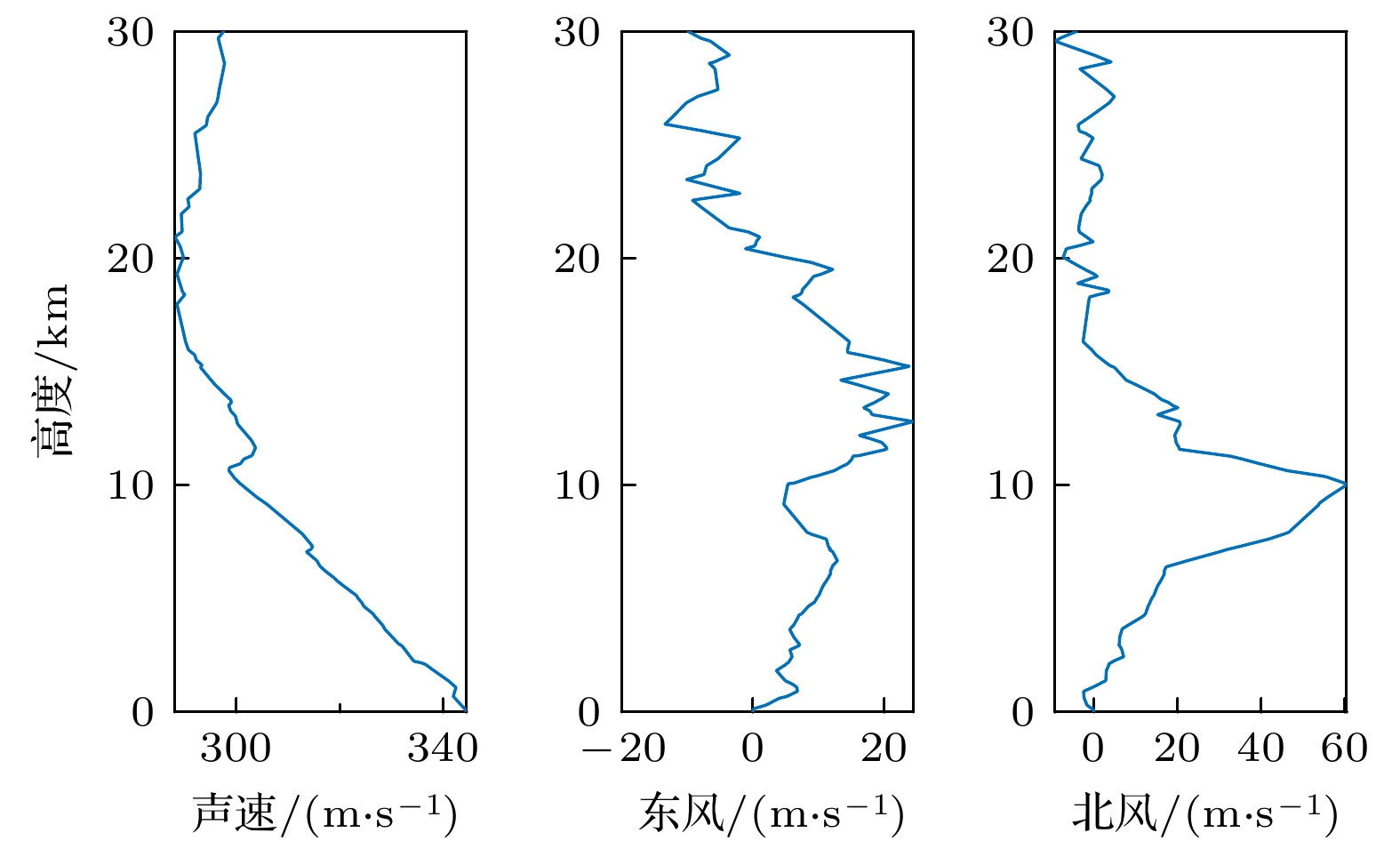
图 3 2018年12月20日12时, 美国密西西比州杰克逊, 声速与风速剖面
Fig. 3. Sound speed and wind profiles for Jackson, Mississippi, U.S. for 20 December 2018 at 12Z

图 5 2018年12月20日12时, 杰克逊剖面计算声压级. 上图正半轴为正东, 负半轴为正西; 下图正半轴为正北, 负半轴为正南
Fig. 5. Sound pressure level at Jackson based on the profile for 20 December 2018 at 12Z. Top is a vertical plane with the left side being to the west, and right side to the east. Bottom is a vertical slice with the leftward being to the south, and rightward to the north
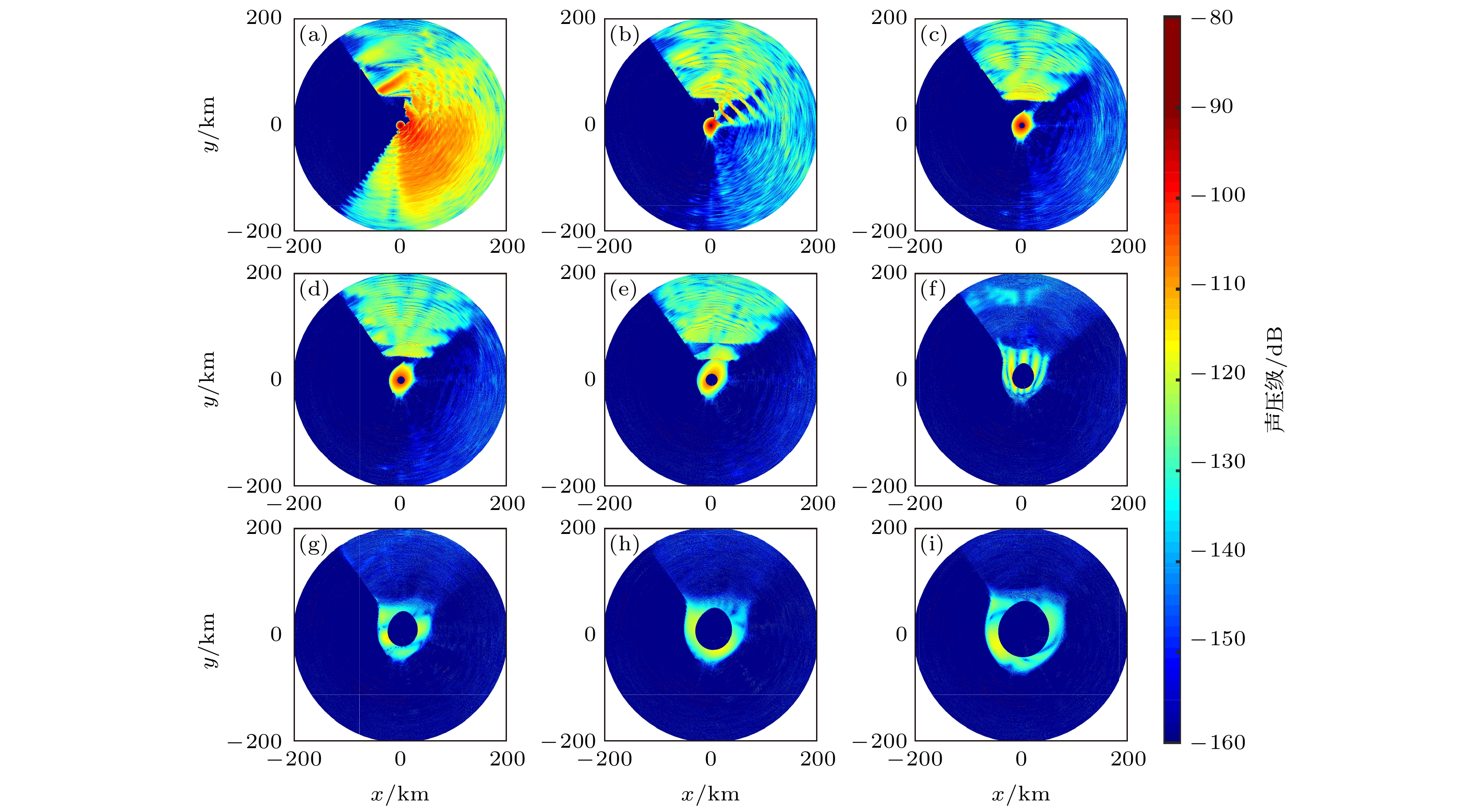
图 6 声压级随高度变化 (a) 0.1 km; (b) 1 km; (c) 2 km; (d) 3 km; (e) 5 km; (f) 10 km; (g) 15 km; (h) 20 km; (i) 30 km
Fig. 6. SPL vs. height of transverse slice: (a) 0.1 km; (b) 1 km; (c) 2 km; (d) 3 km; (e) 5 km; (f) 10 km; (g) 15 km; (h) 20 km; (i) 30 km
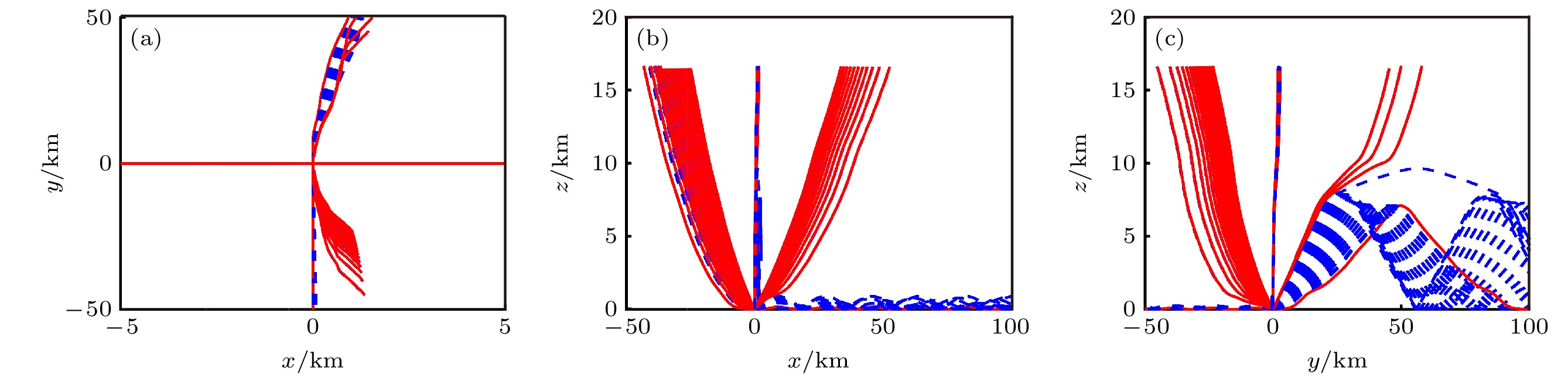
图 7
$ 0^{\circ} $ ,$ 90^{\circ} $ ,$ 180^\circ $ ,$ 270^\circ $ 方位角出射的声线束轨迹 (a) xoy平面; (b) xoz平面; (c) yoz平面Fig. 7. Ray traces at the azimuth of
$ 0^{\circ} $ ,$ 90^{\circ} $ ,$ 180^\circ $ ,$ 270^\circ $ at slices of (a) xoy, (b) xoz, (c) yoz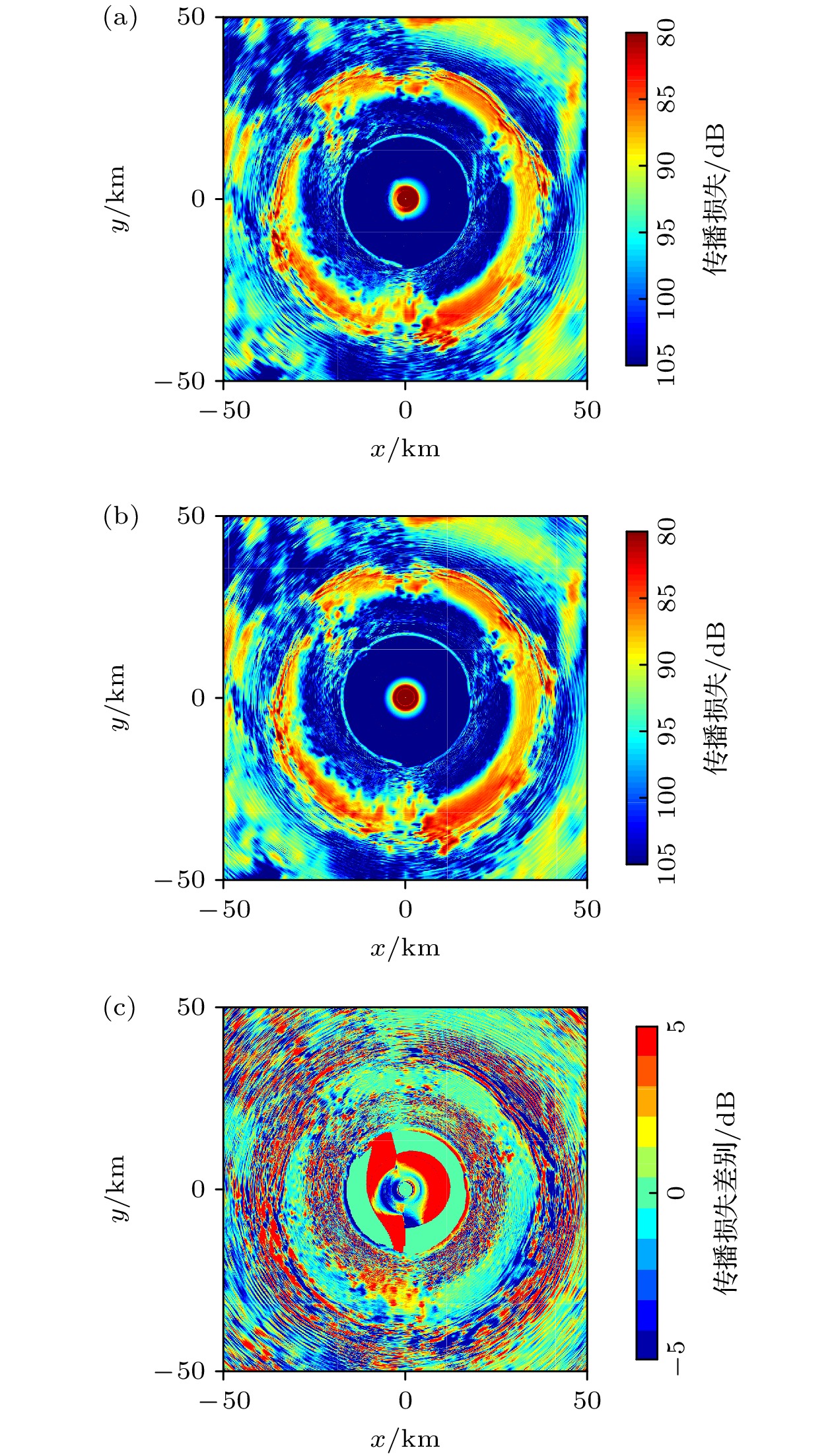
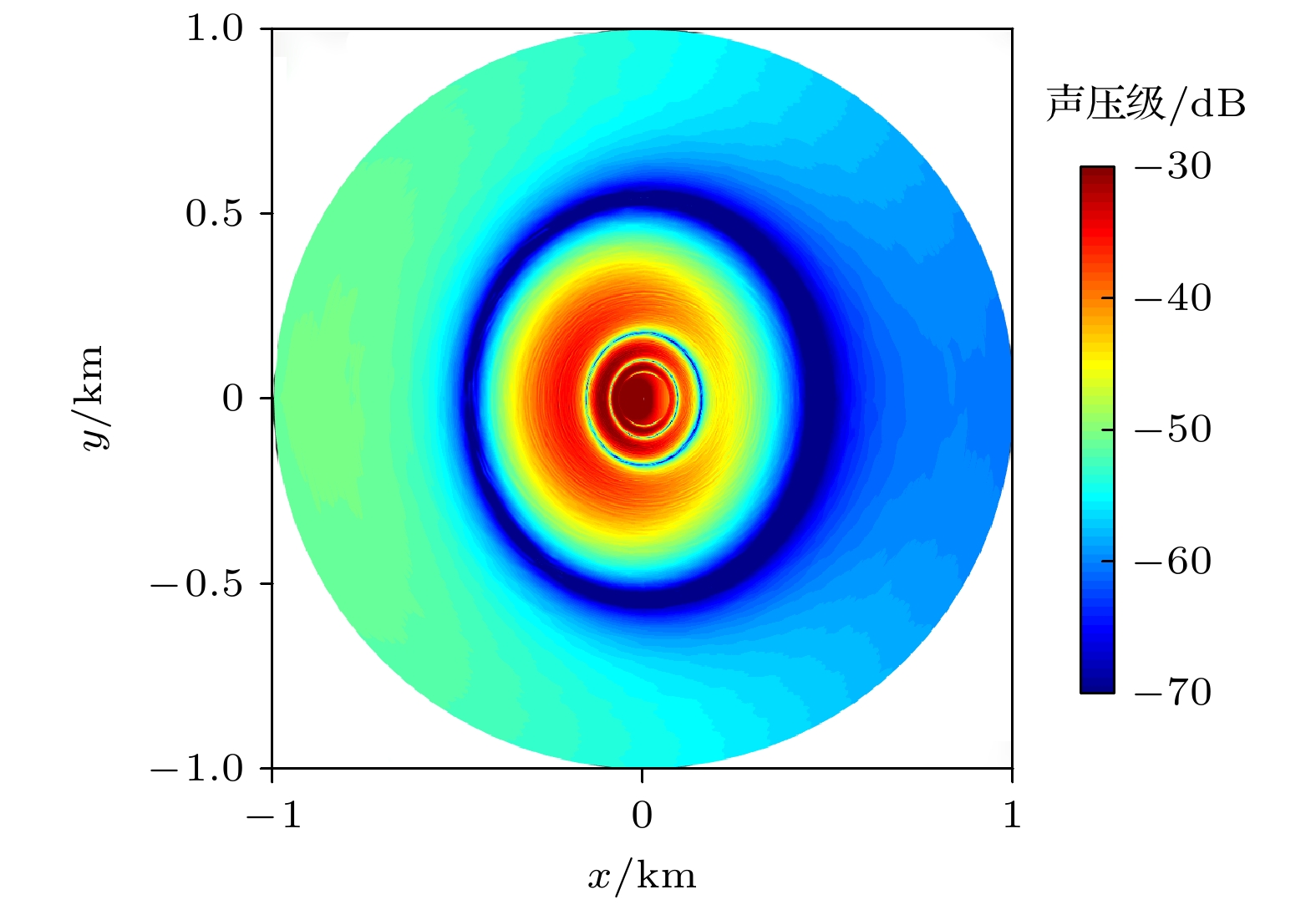
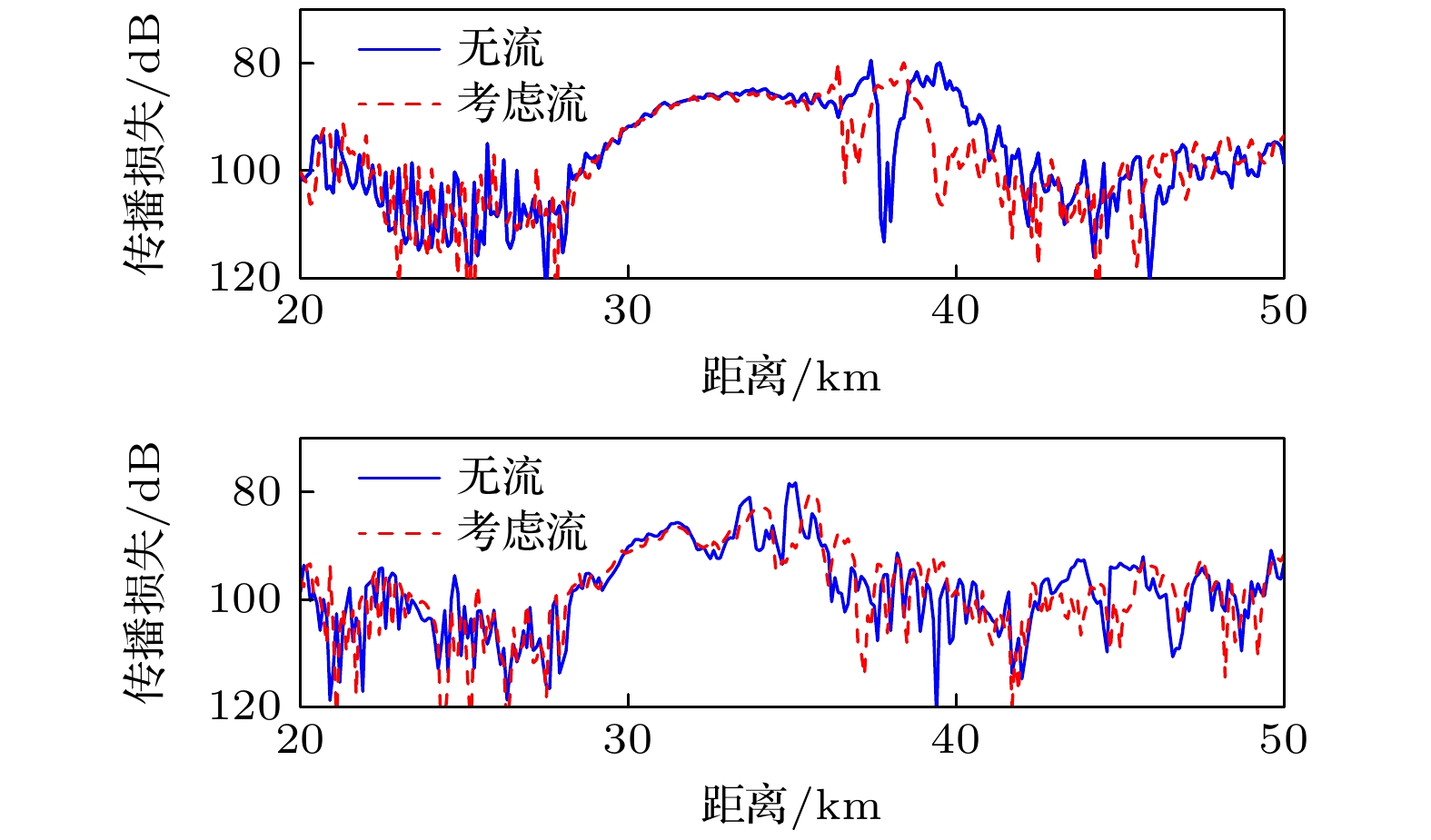
图 11 60 m平面传播损失 (a)考虑海流; (b)不考虑海流; (c)两者差别
Fig. 11. Transmission loss at 60 m horizontal slice: (a) consider current; (b) noflow; (c) difference between (a) and (b)
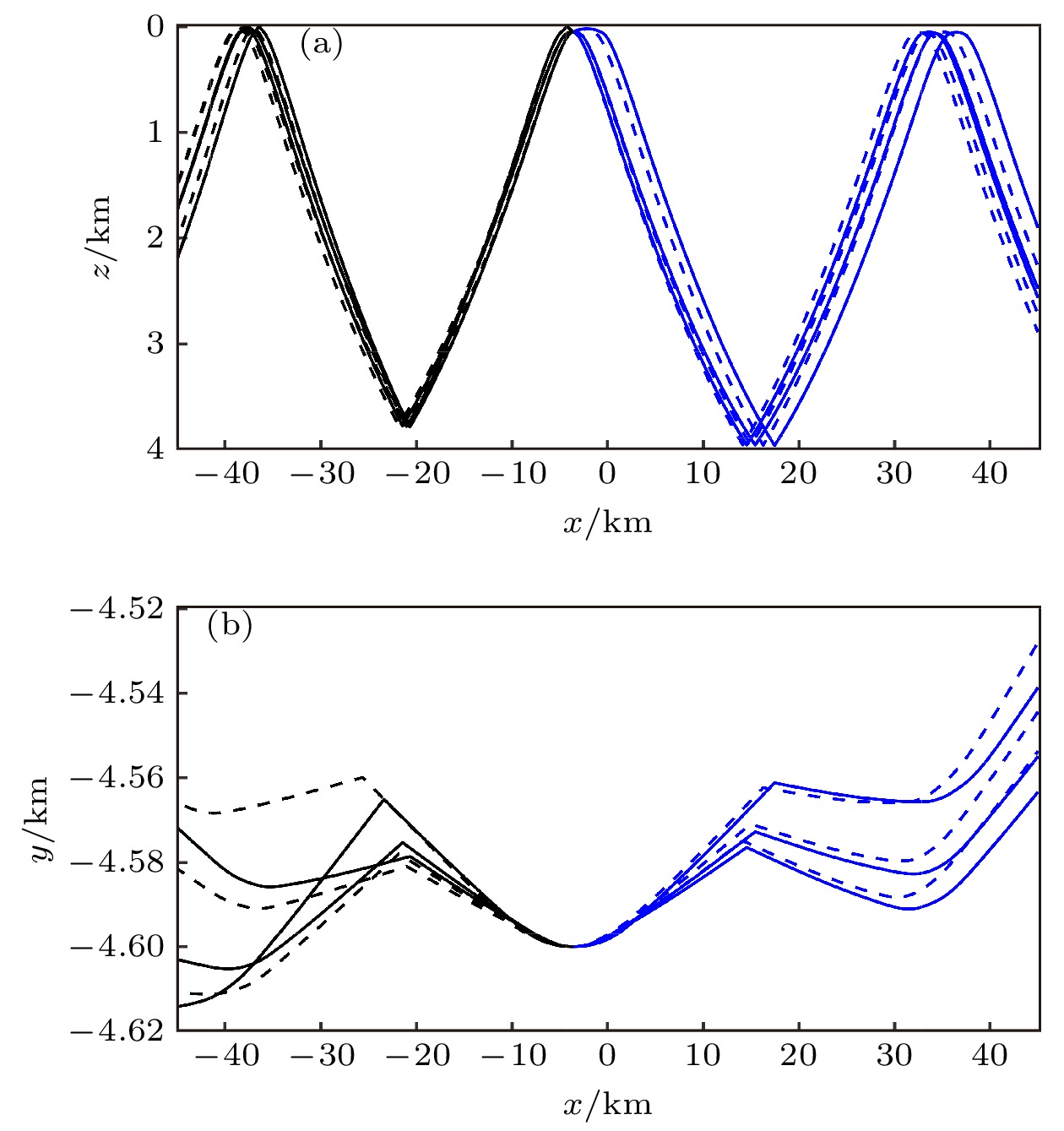
图 12 0°和180°方位角出射声线的轨迹 (a) xoz平面, (b) xoy平面. 实线表示无流的轨迹, 虚线表示考虑流的轨迹, 黑色表示发生海底海面反射的声线, 蓝色表示仅发生海底反射的声线
Fig. 12. Ray trajectories of the azimuth angle of 0° and 180° at slices of (a) xoz , (b) xoy . Solid line is the trajectory in noflow, dotted line in current; black indicates the ray reflected from surface and bottom, blue only reflected from bottom
-
[1] Kirby R 2020 J. Acoust. Soc. Am. 148 3737
Google Scholar
[2] Hassan S E 2021 Recent Trends in Naval Engineering Research (Cham: Springer) p65
[3] Franke S J, Swenson G W 1989 Appl. Acoust. 27 203
Google Scholar
[4] Elisseeff P, Schmidt H 1996 J. Acoust. Soc. Am. 99 2524
Google Scholar
[5] Ostashev V E, Wilson D K, Muhlestein M B 2020 J. Acoust. Soc. Am. 147 3969
Google Scholar
[6] Wilson D K, Shaw M J, Ostashev V E, Muhlestein M B, Alter R E, Swearingen M E, McComas S L 2022 J. Acoust. Soc. Am. 151 138
Google Scholar
[7] Zabotin N A, Godin O A, Sava P C, Zabotina L Y 2012 J. Comput. Acoust. 20 1250009
Google Scholar
[8] Zabotin N A, Godin O A, Sava P C, Zabotina L Y 2014 J. Comput. Acoust. 22 1450002
Google Scholar
[9] Blokhintsev D I 1956 Ph. D. Dissertation (Providence: Brown University)
[10] Jensen F B, Kuperman W A, Porter M B, Schmidt H 2011 Computational Ocean Acoustics (2nd Ed.) (New York: Springer) pp175–179
[11] Ostashev V E, Wilson D K 2015 Acoustics in Moving Inhomogeneous Media (2nd Ed.) (Boca Raton: CRC Press) p11, p96, pp117–119, pp377–386
[12] Porter M B, Bucker H P 1987 J. Acoust. Soc. Am. 82 1349
Google Scholar
[13] Gabillet Y, Schroeder H, Daigle G A, L’Espérance A 1993 J. Acoust. Soc. Am. 93 3105
Google Scholar
[14] Porter M B 2019 J. Acoust. Soc. Am. 146 2016
Google Scholar
[15] Červený V, Pšenčík I 1983 J. Geophys. 53 1
[16] Popov M M, Pšenčík I, Červeny V 1978 Stud. Geophys. Geod. 22 248
Google Scholar
[17] Mo Q, Yeh H, Lin M, Manocha D 2017 J. Acoust. Soc. Am. 141 2289
Google Scholar
[18] Fuerkaiti Y, Casalino D, Acallone F, Ragni 2022 28th AIAA/CEAS Aeroacoustics 2022 Conference Southampton, UK, June 14–17, 2022 p1
[19] 杨训仁, 陈宇 2007 大气声学 (第二版) (北京: 科学出版社) 第44—48页
Yang X R, Chen Y 2007 Atmospheric Acoustics (2nd Ed.) (Beijing: Science Press) pp44–48
[20] Pierce A D 2019 Acoustics: an Introduction to Its Physical Principles and Applications (3rd Ed.) (New York: Springer) pp427–432
[21] Červený V, Hron F 1980 Bull. Seismol. Soc. Am. 70 47
Google Scholar
[22] Schubert L K 1972 J. Acoust. Soc. Am. 51 439
Google Scholar
[23] 程建春 2012 声学原理 (北京: 科学出版社) 第657—660页
Cheng J C 2012 Acoustic Principle (Beijing: Science Press) pp657–660
[24] Ostashev V E, Wilson D K, Liu L, Aldridge D F, Symons N P, Marlin D H 2005 J. Acoust. Soc. Am. 117 503
Google Scholar
[25] Assink J D, Waxler R, Drob D 2012 J. Geophys. Res.: Atmos. 117 D01110
Google Scholar
[26] Pichon A L, Blanc E, Drob D, Lambotte S, Dessa J X, Lardy M, Bani P, Vergniolle S 2005 J. Geophys. Res.: Atmos. 110 D13106
Google Scholar
[27] 程巍, 滕鹏晓, 吕君, 姬培锋, 戴翊靖 2021 物理学报 70 244203
Google Scholar
Cheng W, Teng P X, Lü J, Ji P F, Dai Y J 2021 Acta Phys. Sin. 70 244203
Google Scholar
[28] University of Wyoming, Department of Atmospheric Sciences. http://weather.uwyo.edu/upperair/sounding/ [2022-01-22]
[29] Pichon A L, Ceranna L, Vergoz J 2012 J. Geophys. Res. 117 D05121
Google Scholar
[30] Evers L G, Geyt A R J, Smets P, Frick J T 2012 J. Geophys. Res. 117 D06120
Google Scholar
[31] Godin O A, Mikhin D Y, Molchanov S Y 1993 Izv. Akad. Nauk. Fiz. Atmos. Okeana 29 194
[32] Godin O A 2002 J. Acoust. Soc. Am. 112 1269
Google Scholar
[33] Franchi E R, Jacobson M J 1973 J. Acoust. Soc. Am. 54 1302
Google Scholar
[34] Franchi E R, Jacobson M J 1973 J. Acoust. Soc. Am. 53 835
Google Scholar
[35] Stallworth L A, Jacobson M J 1970 J. Acoust. Soc. Am. 48 382
Google Scholar
[36] 张泽众, 骆文于, 庞哲, 周益清 2019 物理学报 68 204302
Google Scholar
Zhang Z Z, Luo W Y, Pang Z, Zhou Y Q 2019 Acta Phys. Sin. 68 204302
Google Scholar
[37] Henrick R F, Siegmann W L, Jacobson M J 1977 J. Acoust. Soc. Am. 62 860
Google Scholar
[38] Henrick R F, Jacobson M J, Siegmann W L 1980 J. Acoust. Soc. Am. 67 121
Google Scholar
[39] Grigor’eva N S, Yavor M I 1986 Sov. Phys. Acoust. 32 482
[40] Copernicuse https://www.copernicus.eu/en [2022-1-30]
[41] Coppens A B 1981 J. Acoust. Soc. Am. 69 862
Google Scholar

 下载:
下载:








计量
- 文章访问数: 5865
- PDF下载量: 170
- 被引次数: 0
