










-
最初机-电模型是针对电磁轨道炮的电磁加速过程提出的, 脉冲等离子体推力器(pulsed plasma thruster, PPT)的工作原理也是通过电磁加速产生元冲量, 因此机-电模型是PPT能量转化及元冲量产生机制的主要理论分析工具之一. 但是作为PPT放电回路一部分的等离子体通道, 其几何形态与目前机-电模型的电流片模型存在明显差异. PPT放电通道在离开推进剂表面向外喷出过程中多呈现弯曲形状, 并不断变化, 而非平直片状. 结合PPT放电通道的实际形态, 本文提出了PPT放电通道的二维形态电流片模型, 建立基于二维电流片的改进型机-电模型. 通过分析放电通道受力情况以及电磁加速过程, 推导了PPT羽流的电磁加速动能与放电回路电感量随时间演变函数的关系. 针对机-电模型电路方程, 提出了分段拟合PPT放电波形获得回路电感量随时间演变函数的算法. 形成了基于PPT放电波形分析得到羽流电磁加速动能的计算方案. 将改进型机-电模型应用于PPT样机能量转化效率评价, 通过分析PPT放电能量转化过程阐释了PPT机-电转化效率低的原因, 提出了提高PPT机-电效率的一种探索思路.The primary electro-mechanical model is developed for the acceleration kinetics of electromagnetic railguns. Pulsed plasma thrusters (PPTs), whose operation principle is similar to that of electromagnetic railguns, generate thrust via electromagnetic acceleration of plasma. Therefore, the electro-mechanical model serves as a valuable analytical tool to explore the mechanisms of energy conversion and thrust generation of PPTs. In fact, a PPT initiates discharge at its propellant surface and then ejects the discharged channel away to form accelerated plume. During the acceleration, the plasma channel assumes a curved shape, which is different from the flat sheet shape. The curved geometric shape of PPT discharge channel makes the flat current sheet model currently used in the electro-mechanical models inherently flawed. In this paper, a two-dimensional (2D) curved current sheet model is proposed to improve the PPT electro-mechanical model, by referring to the curved morphology of PPT discharge plasma channels. No matter what is the real geometry of the 2D current sheet, the Ampere force on discharge plasma channels and corresponding kinetics can be derived to obtain final kinetic energy of discharge plasma channels. As a result, the relation between the kinetic energy and the inductance of PPT discharge circuit is obtained and expressed as $ {E}_{{\mathrm{k}}}=\displaystyle\int _{0}^{{t}_{{\mathrm{e}}{\mathrm{n}}{\mathrm{d}}}}{i\left(t\right)}^{2}\frac{{\mathrm{d}}{L}_{{\mathrm{e}}{\mathrm{q}}}\left(t\right)}{{\mathrm{d}}t}{\mathrm{d}}t $. To determine the inductance as a temporal function, an algorithm for the inductance is proposed in which time-segment fitting of PPT discharge waveforms is adopted. Moreover, based on the temporal function of the inductance, PPT discharge waveforms can be simulated by using the ODE45 solver of MATLAB with high fitting goodness. So far, a calculation scheme for the kinetic energy of PPT plumes and simulation code for PPT discharge waveforms have set up based on the improved electro-mechanical model. To verify the improved model and the corresponding calculation scheme, the PPT prototype is used to evaluate its energy conversion efficiency. The results show that the model enables elucidating the low PPT electro-mechanical efficiency, which is attributed to the partition limitation of PPT energy to electromagnetic acceleration process. Accordingly, a possible exploration routine for elevating PPT electro-mechanical efficiency is suggested.
-
Keywords:
- pulsed plasma thruster /
- improved electro-mechanical model /
- electro-mechanical efficiency /
- plume kinetic energy
[1] Wu Z W, Huang T K, Liu X Y, Ling W Y L, Wang N F, Ji L C 2020 Plasma Sci. Technol. 22 094014
 Google Scholar
Google Scholar
[2] Northway P 2020 Ph. D. Dissertation (Washington: University of Washington
[3] Lev D, Myers R M, Lemmer K M, Kolbeck J, Koizumi H, Polzin K 2019 Acta Astronaut. 159 213
Google Scholar
[4] 吴建军, 胡泽君, 张宇, 何志成, 欧阳, 郑鹏, 赵元政, 李宇奇 2023 推进技术 44 11
Google Scholar
Wu J J, Hu Z J, Zhang Y, He Z C, Ou Y, Zheng P, Zhao Y Z, Li Y Q 2023 J. Propul. Technol. 44 11
Google Scholar
[5] Molina-Cabrera P, Herdrich G, Lau M, Fausolas S, Schönherr T, Komurasaki K 2011 the 32nd International Electric Propulsion Conference Wiesbaden, September 11–15, 2011 p1
[6] Spanjers G, McFall K, Gulczinski F, Spores R 1996 32nd AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit Lake Buena Vista, July 1–3, 1996 p2723
[7] Koizumi H, Noji R, Komurasaki K, Arakawa Y 2007 Phys. Plasmas 14 033506
Google Scholar
[8] Gomez E W, Saravia M M, Castelló W B, Elaskar S 2022 8th International Conference on Space Propulsion ESTORIL, May 9–13, 2022 p00203
[9] Antropov N, Diakonov G, Orlov M, Popov G, Yakovlev V 2003 28th International Electric Propulsion Conference Paper Toulouse, March 17–21 2003 p3
[10] Schönherr T, Nawaz A, Herdrich G, Röser H P, Auweter-Kurtz M 2009 J. Propul. Power 25 380
Google Scholar
[11] Palumbo D J, Guman W J 1976 J. Spacecraft Rockets 13 163
Google Scholar
[12] Ling W Y L, Zhang S, Fu H, Huang M C, Quansah J, Liu X Y, Wang N F 2020 Chin. J. Aeronaut. 33 2999
Google Scholar
[13] Ou Y, Wu J J, Du X R, Zhang H, He Z F 2019 Vacuum 165 163
Google Scholar
[14] Spanjers G G, Lotspeich J S, McFall K A, Spores R A 1998 J. Propul. Power 14 554
Google Scholar
[15] Schönherr T, Komurasaki K, Herdrich G 2013 J. Propul. Power 29 1478
Google Scholar
[16] Zeng L H, Wu Z W, Sun G R, Huang T K, Xie K, Wang N F 2019 Acta Astronaut. 160 317
Google Scholar
[17] Nawaz A, Albertoni R, Auweter-Kurtz M 2010 Acta Astronaut. 67 440
Google Scholar
[18] Wu Z W, Sun G R, Huang T K, Liu X, Xie K, Wang N F 2018 AIAA J. 56 3024
Google Scholar
[19] Jahn R G 1968 Physics of Electric Propulsion (New York: McGraw-Hill) p263
[20] Turchi P, Mikellides P 1995 31st AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit San Diego, July 10–12, 1995 p1
[21] Gatsonis N A, Hastings D E 1992 J. Geophys. Res.-Space 97 14989
Google Scholar
[22] Vondra R J, Thomassen K, Solbes A 1970 J. Spacecraft Rockets 7 1402
Google Scholar
[23] 魏荣华 1982 空间科学学报 2 319
Google Scholar
Wei R H 1982 Chin. J. Space Sci. 2 319
Google Scholar
[24] Laperriere D, Gatsonis N, Demetriou M 2005 41st AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit Tucson, July 10–13, 2005 p4077
[25] Gatsonis N, Demetriou M 2004 40st AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit Florida, July 11–14, 2004 p3464
[26] Laperriere D D 2005 M. S. Thesis (Massachusetts: Worcester Polytechnic Institute
[27] Ou Y, Wu J J, Zhang Y, Li J, Tan S 2018 Energies 11 1146
Google Scholar
[28] 张华, 吴建军, 张代贤, 张锐, 何振 2013 物理学报 62 210202
Google Scholar
Zhang H, Wu J J, Zhang D X, Zhang R, He Z 2013 Acta Phys. Sin. 62 210202
Google Scholar
[29] Mikellides Y G 1999 Theoretical Modeling and Optimization of Ablation-fed Pulsed Plasma Thrusters (The Ohio State University
[30] Mikellides P G, Henrikson E M, Rajagopalan S S 2019 J. Propul. Power 35 811
Google Scholar
[31] Keidar M, Boyd I D, Beilis I I 2003 J. Propul. Power 19 424
Google Scholar
[32] Keidar M, Boyd I 2002 38st AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit Indianapolis, July 7–10, 2002 p4275
[33] Yang L, Huang Y, Tang H, Liu X 2015 34th International Electric Propulsion Conference and 6th Nano-satellite Symposium Hyogo-Kobe, July 4–10, 2015 p1
[34] Yang L, Liu X Y, Wu Z W, Wang N F 2011 47th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit California, USA, July 31–August 3, 2011 p6077
[35] Riazantsev A, Jakubczak M, Kurzyna J 2024 38th International Electric Propulsion Conference Toulouse, June 23–28, 2024 p1
[36] Schönherr T, Nawaz A, Lau M, Petkow D, Herdrich G 2010 Trans. JSASS Aerospace Tech. Japan 8 Tb_11
Google Scholar
[37] 王亚楠, 任林渊, 丁卫东, 孙安邦, 耿金越 2021 物理学报 70 235204
Google Scholar
Wang Y N, Ren L Y, Ding W D, Sun A B, Geng J Y 2021 Acta Phys. Sin. 70 235204
Google Scholar
[38] 王尚民, 田立成, 张家良, 张天平, 冯玮玮, 陈新伟, 高军 2017 中国空间科学技术 37 24
Google Scholar
Wang S M, Tian L C, Zhang J L, Zhang T P, Feng W W, Chen W X, Gao J 2017 Chin. Space Sci. Technol. 37 24
Google Scholar
-
图 1 基本PPT机-电模型等效电路示意图
Fig. 1. Equivalent circuit schematic of primary PPT electromechanical model.
图 2 二维薄电流片及机-电模型电路示意图
Fig. 2. Circuit schematic of the improved electromechanical model with 2D thin current sheet.
图 4 典型PPT放电电流波形及其数值滤波、对比拟合效果 (a) 原始电流波形及滤波效果; (b) 电流波形的不同拟合效果对比
Fig. 4. A typical current waveform and its numerical filtering and fitting: (a) Measured and filtered waveforms; (b) current waveform fittings with different scheme.
图 5 PPT波形的分段拟合区间划分及仿真效果 (a) 分段拟合区间的划分示意图; (b) 波形的分段拟合效果; (c) 波形的仿真效果
Fig. 5. Segmentation and the simulation outcome of PPT waveform: (a) Fitting segments; (b) segmental fitted waveform; (c) simulated waveform.
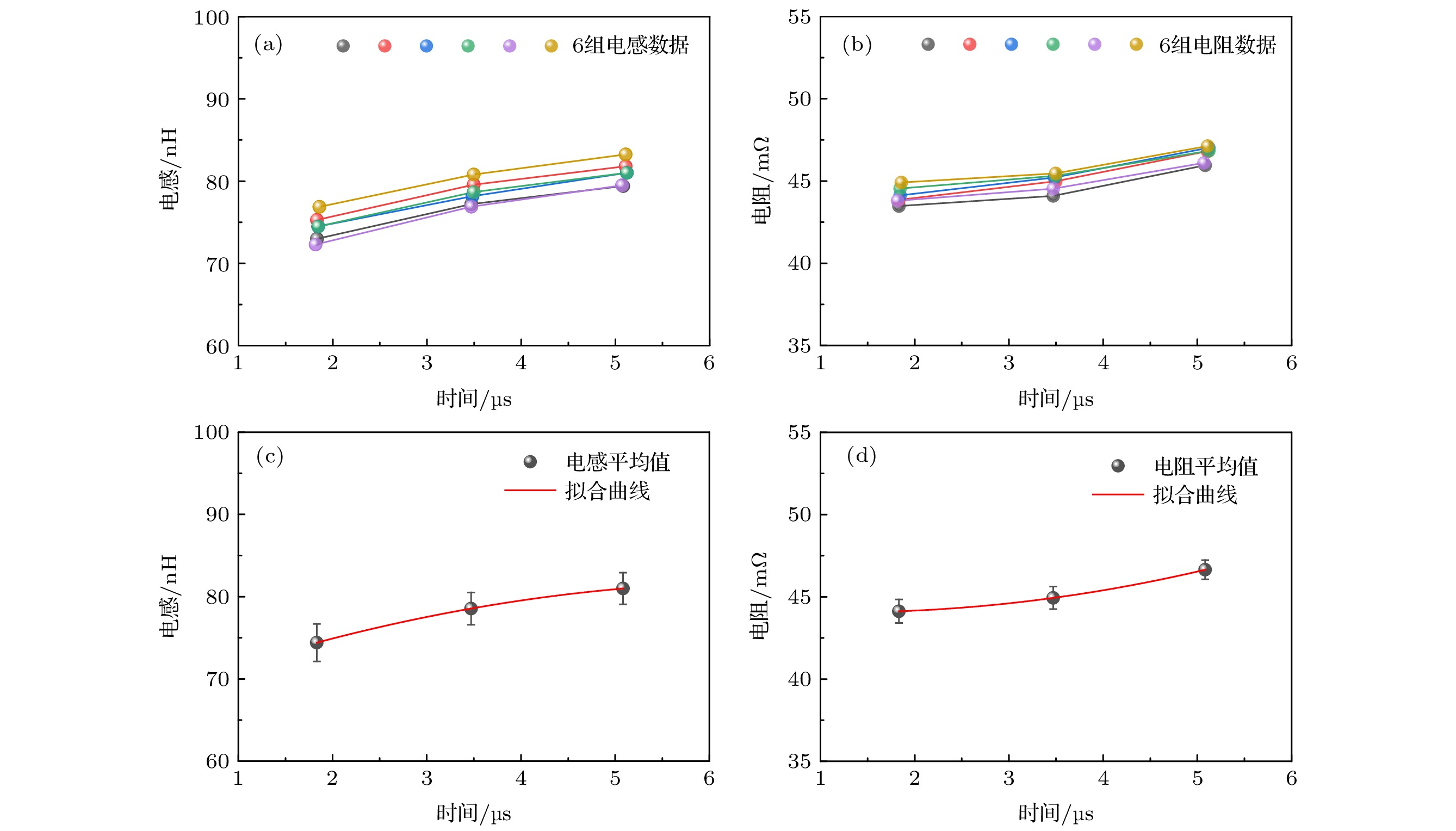
图 6 PPT放电回路的时变特性 (a) 6次PPT回路电感数据; (b) 6次PPT回路电阻数据; (c) 电感二次式拟合效果; (d) 电阻二次式拟合效果
Fig. 6. Temporal variance of PPT circuit inductance during discharge: (a) Inductive data for 6 PPT discharges; (b) resistance data for 6 PPT discharges; (c) inductive fitting with a quadratic function; (d) resistance fitting with a quadratic function.

图 7 基于改进PPT机-电模型计算的电磁加速动能
Fig. 7. Electromagnetic kinetic energy calculated with the improved PPT electromechanical model.
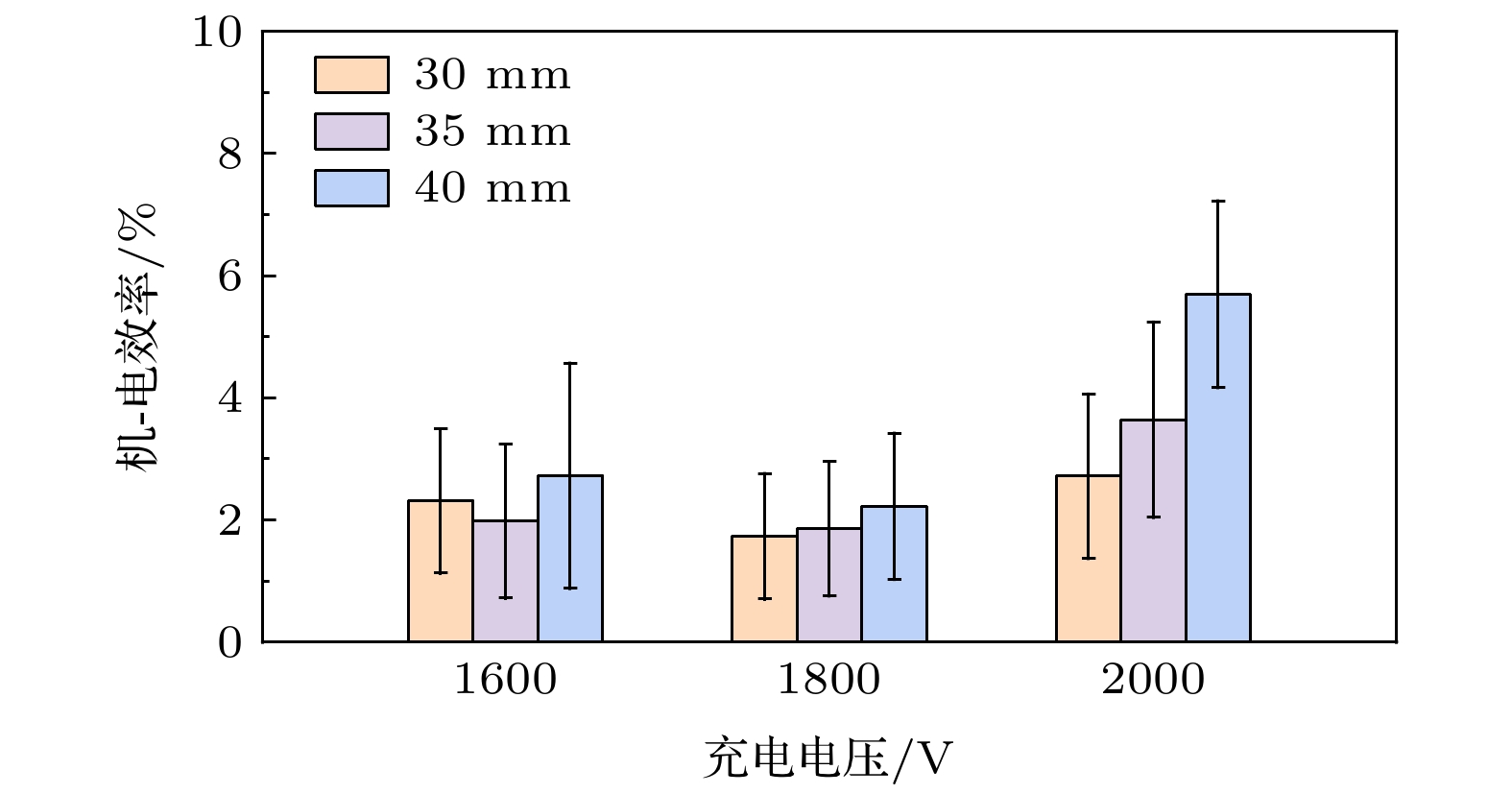
图 8 PPT机-电效率随工况参数的变化
Fig. 8. Electromechanical efficiency with operation conditions of PPT.
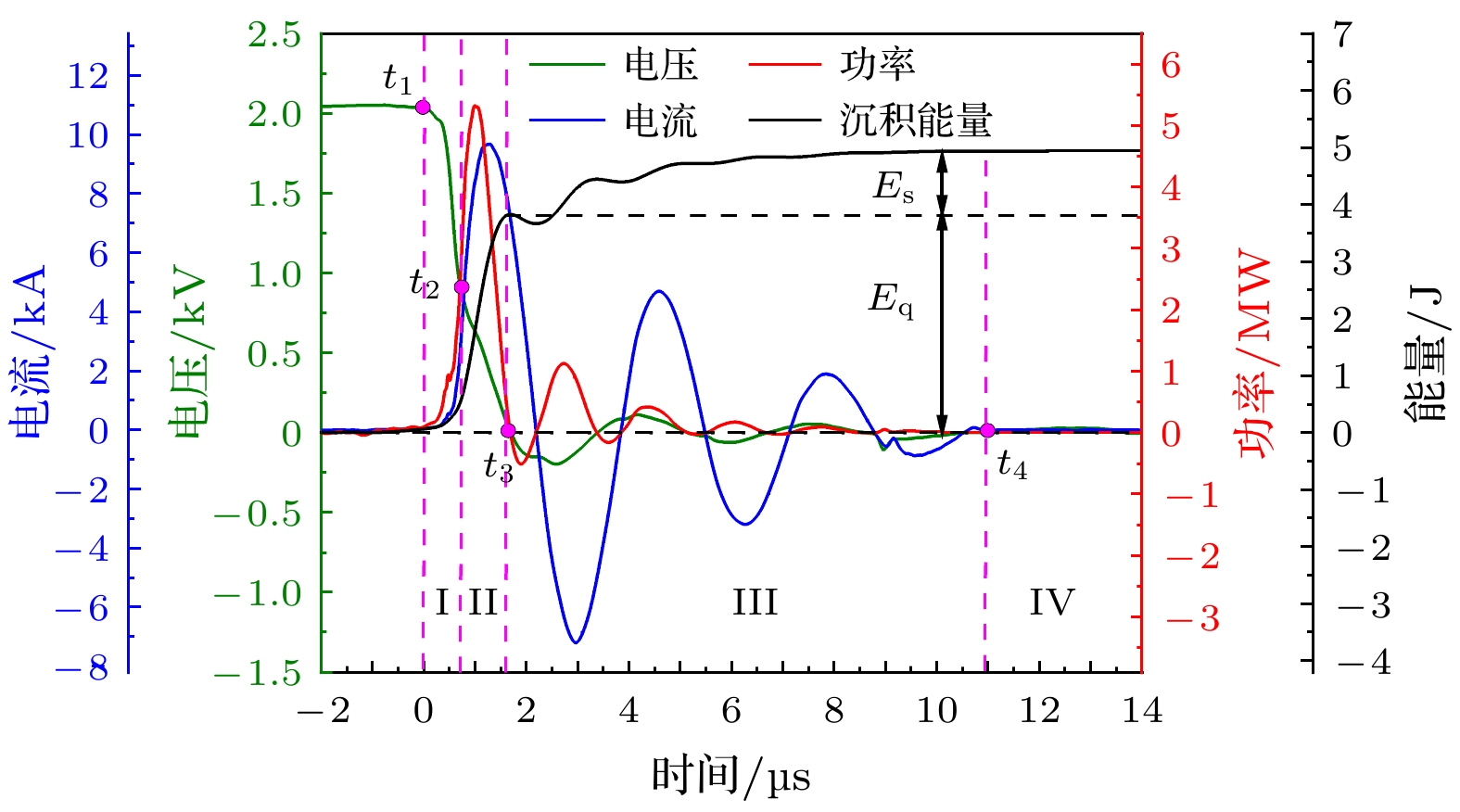
图 9 PPT放电电压、电流、瞬时功率和能量沉积的典型波形($ {E}_{{\mathrm{q}}} $, 快沉积能量; $ {E}_{{\mathrm{s}}} $, 慢沉积能量)
Fig. 9. Typical waveforms of PPT discharge voltage, current, power and energy deposition ($ {E}_{{\mathrm{q}}} $, quick deposition energy; $ {E}_{{\mathrm{s}}} $, slow deposition energy).
-
[1] Wu Z W, Huang T K, Liu X Y, Ling W Y L, Wang N F, Ji L C 2020 Plasma Sci. Technol. 22 094014
Google Scholar
[2] Northway P 2020 Ph. D. Dissertation (Washington: University of Washington
[3] Lev D, Myers R M, Lemmer K M, Kolbeck J, Koizumi H, Polzin K 2019 Acta Astronaut. 159 213
Google Scholar
[4] 吴建军, 胡泽君, 张宇, 何志成, 欧阳, 郑鹏, 赵元政, 李宇奇 2023 推进技术 44 11
Google Scholar
Wu J J, Hu Z J, Zhang Y, He Z C, Ou Y, Zheng P, Zhao Y Z, Li Y Q 2023 J. Propul. Technol. 44 11
Google Scholar
[5] Molina-Cabrera P, Herdrich G, Lau M, Fausolas S, Schönherr T, Komurasaki K 2011 the 32nd International Electric Propulsion Conference Wiesbaden, September 11–15, 2011 p1
[6] Spanjers G, McFall K, Gulczinski F, Spores R 1996 32nd AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit Lake Buena Vista, July 1–3, 1996 p2723
[7] Koizumi H, Noji R, Komurasaki K, Arakawa Y 2007 Phys. Plasmas 14 033506
Google Scholar
[8] Gomez E W, Saravia M M, Castelló W B, Elaskar S 2022 8th International Conference on Space Propulsion ESTORIL, May 9–13, 2022 p00203
[9] Antropov N, Diakonov G, Orlov M, Popov G, Yakovlev V 2003 28th International Electric Propulsion Conference Paper Toulouse, March 17–21 2003 p3
[10] Schönherr T, Nawaz A, Herdrich G, Röser H P, Auweter-Kurtz M 2009 J. Propul. Power 25 380
Google Scholar
[11] Palumbo D J, Guman W J 1976 J. Spacecraft Rockets 13 163
Google Scholar
[12] Ling W Y L, Zhang S, Fu H, Huang M C, Quansah J, Liu X Y, Wang N F 2020 Chin. J. Aeronaut. 33 2999
Google Scholar
[13] Ou Y, Wu J J, Du X R, Zhang H, He Z F 2019 Vacuum 165 163
Google Scholar
[14] Spanjers G G, Lotspeich J S, McFall K A, Spores R A 1998 J. Propul. Power 14 554
Google Scholar
[15] Schönherr T, Komurasaki K, Herdrich G 2013 J. Propul. Power 29 1478
Google Scholar
[16] Zeng L H, Wu Z W, Sun G R, Huang T K, Xie K, Wang N F 2019 Acta Astronaut. 160 317
Google Scholar
[17] Nawaz A, Albertoni R, Auweter-Kurtz M 2010 Acta Astronaut. 67 440
Google Scholar
[18] Wu Z W, Sun G R, Huang T K, Liu X, Xie K, Wang N F 2018 AIAA J. 56 3024
Google Scholar
[19] Jahn R G 1968 Physics of Electric Propulsion (New York: McGraw-Hill) p263
[20] Turchi P, Mikellides P 1995 31st AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit San Diego, July 10–12, 1995 p1
[21] Gatsonis N A, Hastings D E 1992 J. Geophys. Res.-Space 97 14989
Google Scholar
[22] Vondra R J, Thomassen K, Solbes A 1970 J. Spacecraft Rockets 7 1402
Google Scholar
[23] 魏荣华 1982 空间科学学报 2 319
Google Scholar
Wei R H 1982 Chin. J. Space Sci. 2 319
Google Scholar
[24] Laperriere D, Gatsonis N, Demetriou M 2005 41st AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit Tucson, July 10–13, 2005 p4077
[25] Gatsonis N, Demetriou M 2004 40st AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit Florida, July 11–14, 2004 p3464
[26] Laperriere D D 2005 M. S. Thesis (Massachusetts: Worcester Polytechnic Institute
[27] Ou Y, Wu J J, Zhang Y, Li J, Tan S 2018 Energies 11 1146
Google Scholar
[28] 张华, 吴建军, 张代贤, 张锐, 何振 2013 物理学报 62 210202
Google Scholar
Zhang H, Wu J J, Zhang D X, Zhang R, He Z 2013 Acta Phys. Sin. 62 210202
Google Scholar
[29] Mikellides Y G 1999 Theoretical Modeling and Optimization of Ablation-fed Pulsed Plasma Thrusters (The Ohio State University
[30] Mikellides P G, Henrikson E M, Rajagopalan S S 2019 J. Propul. Power 35 811
Google Scholar
[31] Keidar M, Boyd I D, Beilis I I 2003 J. Propul. Power 19 424
Google Scholar
[32] Keidar M, Boyd I 2002 38st AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit Indianapolis, July 7–10, 2002 p4275
[33] Yang L, Huang Y, Tang H, Liu X 2015 34th International Electric Propulsion Conference and 6th Nano-satellite Symposium Hyogo-Kobe, July 4–10, 2015 p1
[34] Yang L, Liu X Y, Wu Z W, Wang N F 2011 47th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit California, USA, July 31–August 3, 2011 p6077
[35] Riazantsev A, Jakubczak M, Kurzyna J 2024 38th International Electric Propulsion Conference Toulouse, June 23–28, 2024 p1
[36] Schönherr T, Nawaz A, Lau M, Petkow D, Herdrich G 2010 Trans. JSASS Aerospace Tech. Japan 8 Tb_11
Google Scholar
[37] 王亚楠, 任林渊, 丁卫东, 孙安邦, 耿金越 2021 物理学报 70 235204
Google Scholar
Wang Y N, Ren L Y, Ding W D, Sun A B, Geng J Y 2021 Acta Phys. Sin. 70 235204
Google Scholar
[38] 王尚民, 田立成, 张家良, 张天平, 冯玮玮, 陈新伟, 高军 2017 中国空间科学技术 37 24
Google Scholar
Wang S M, Tian L C, Zhang J L, Zhang T P, Feng W W, Chen W X, Gao J 2017 Chin. Space Sci. Technol. 37 24
Google Scholar

 下载:
下载:

计量
- 文章访问数: 3466
- PDF下载量: 51
- 被引次数: 0
