










-
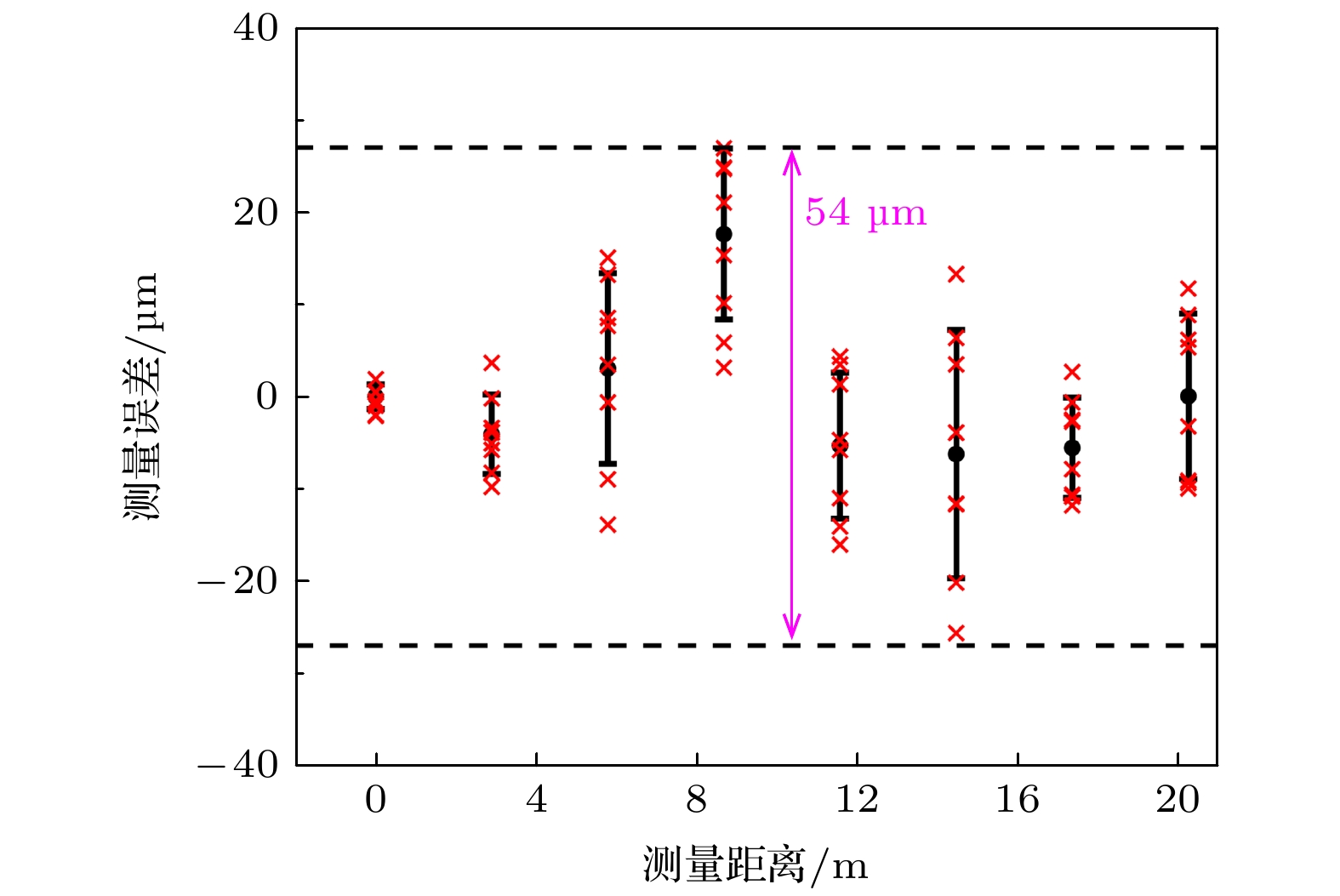
提出了一种基于动态光学频率梳啁啾脉冲干涉的绝对距离快速测量方法. 借助于重复频率的线性扫描, 可获取啁啾光谱干涉信号中最宽条纹的动态频率偏移, 从而完成被测距离的高精度测量. 动态重复频率能够延伸光谱仪探测极限, 相应地减小测量盲区, 并且基于合成波长也使得测量非模糊范围得到极大的拓展. 本文测距系统无需重复频率的锁定, 能够摆脱对锁相环等复杂应用模式的依赖, 在简化系统的同时借助铷钟提供精准时钟参考, 从而进一步提高测量精度. 此外, 电荷耦合器件成像帧速以及重复频率扫描速度的提升可实现干涉信号的快速采集, 弥补传统光谱干涉测量以及腔调谐方式在探测速度上的不足. 实验结果表明, 本文方法单点测距数据更新率为13.5 Hz, 相较于参考数值, 在20 m的测量范围内, 测量不确定度优于27 μm, 相对精度为1.35 × 10–6.Frequency combs have given rise to revolutionary progress in a variety of applications. The absolute distance measurement by using frequency comb has been developing rapidly in recent years. In this paper, a method of rapid ranging via the dynamic chirped pulse interferometry is proposed. With the sweeping of comb spacing, the dynamic frequency offset of the sparsest stripes can be obtained in the chirped pulse interferometry, which leads to the cues about the measuring distance. The introduction of dynamic comb spacing can effectively reduce the dead zone of the optical spectrum analyzer. Based on the theory of synthetic wavelength, the multiple repetition frequency can also realize a great non-ambiguity range. In the measuring system, there is no need to lock the repetition rate any more, thereby removing the dependency of bulky phase-locking circuits, and simplifying the system. Besides, the rubidium clock brings the accurate clock reference in the system. Hence, the repetition rate and camera can perform strict synchronization. Considering the improvements of imaging frame rate and the scanning speed of repetition rates, the changed spectral interferograms can be obtained rapidly, and thus compensating for the speed deficiency of dispersive interferometry and cavity tuning. The experimental results show that elapsed time is 74.1 ms for the single time, corresponding to a data updating rate of 13.5 Hz. In a range of 20 m, the measurement uncertainty is well within 27 μm, i.e. the relative precision of 1.35 × 10–6.
-
Keywords:
- absolute distance measurement /
- dynamic optical frequency comb /
- chirped pulse interferometry
[1] Newbury N R 2011 Nat. Photonics 5 186
 Google Scholar
Google Scholar
[2] Diddams S A, Vahala K, Udem T 2020 Science 369 3676
Google Scholar
[3] Fortier T, Baumann E 2019 Commun. Phys. 2 153
Google Scholar
[4] Udem T, Holzwarth R, Hänsch T W 2002 Nature 416 233
Google Scholar
[5] Lamb E S, Carlson D R, Hickstein D D, Stone J R, Diddams S A, Papp S B 2018 Phys. Rev. A 9 024030
Google Scholar
[6] Coddington I, Newbury N, Swann W 2016 Optica 3 414
Google Scholar
[7] Picqué N, Hänsch T W 2019 Nat. Photonics 13 146
Google Scholar
[8] McCracken R A, Charsley J M, Reid D T 2017 Opt. Express 25 15058
Google Scholar
[9] Roztocki P, Morandotti R 2019 Nat. Astron. 3 135
Google Scholar
[10] 周维虎, 石俊凯, 纪荣祎, 黎尧, 刘娅 2017 仪器仪表学报 38 1859
Google Scholar
Zhou W H, Shi J K, Ji R Y, Li Y, Liu Y 2017 J. Sci. Instrum. 38 1859
Google Scholar
[11] Jang Y S, Kim S W 2018 Nanomanuf. Metrol. 1 131
Google Scholar
[12] Lee J, Kim Y J, Lee K, Lee S, Kim S W 2010 Nat. Photonics 4 716
Google Scholar
[13] Wu H Z, Zhang F M, Liu T Y, Balling P, Li J S, Qu X H 2016 Opt. Lett. 41 2366
Google Scholar
[14] 彭博, 曲兴华, 张福民, 张天宇, 张铁犁, 刘晓旭, 谢阳 2018 物理学报 67 210601
Google Scholar
Peng B, Qu X H, Zhang F M, Zhang T Y, Zhang T L, Liu X X, Xie Y 2018 Acta Phys. Sin. 67 210601
Google Scholar
[15] Wang G, Jang Y S, Hyun S, Chun B J, Kang H J, Yan S, Kim S W, Kim Y J 2015 Opt. Express 23 9121
Google Scholar
[16] Minoshima K, Matsumoto H 2000 Appl. Opt. 39 5512
Google Scholar
[17] Doloca N R, Meiners-Hagen K, Wedde M 2010 Meas. Sci. Technol. 21 115302
Google Scholar
[18] Gil-Molina A, Castañeda J A, Londono-Giraldo D F, Gabrielli L H, Cárdenas A M, Fragnito H L 2020 Opt. Express 28 4258
Google Scholar
[19] Uribe-Patarroyo N, Kassani S H, Villiger M, Bouma B E 2018 Opt. Express 26 9081
Google Scholar
[20] Atalar O, Millar D S, Wang P, Koike-Akino T, Kojima K, Orlik P V, Parsons K 2020 Opt. Express 28 37798
Google Scholar
[21] Joo K N, Kim S W 2006 Opt. Express 14 5954
Google Scholar
[22] Wu H Z, Zhang F M, Liu T Y, Meng F, Li J S, Qu X H 2015 Opt. Express 23 31582
Google Scholar
[23] Coddington I, Swann W C, Nenadovic L, Newbury N R 2009 Nat. Photonics 3 351
Google Scholar
[24] Liu T A, Newbury N R, Coddington I 2011 Opt. Express 19 18501
Google Scholar
[25] Ideguchi T, Poisson A, Guelachvili G, Picqué N, Hänsch T W 2014 Nat. Commun. 5 3375
Google Scholar
[26] 刘亭洋, 张福民, 吴翰钟, 李建双, 石永强, 曲兴华 2016 物理学报 65 020601
Google Scholar
Liu T Y, Zhang F M, Wu H Z, Li J S, Shi Y Q, Qu X H 2016 Acta Phys. Sin. 65 020601
Google Scholar
[27] Wu H Z, Zhang F M, Liu T Y, Li J S, Qu X H 2016 Opt. Express 24 24361
Google Scholar
[28] Ciddor P E 1996 Appl. Opt. 35 1566
Google Scholar
-

图 4 相机标定实验结果图 (a), (d) 两标定重复频率对应光谱图; (b), (e) 两标定重复频率对应相机采集图像; (c), (f) 图像灰度处理结果
Fig. 4. Experimental results of CCD calibration: (a), (d) Spectrograms for two calibrated repetition rates; (b), (e) captured camera images for two calibrated repetition rates; (c), (f) grayscale images processing results.

图 6 啁啾脉冲干涉实验结果图 (a) 2.9 m处光谱图; (b) 2.9 m处相机采集条纹; (c) 17.4 m处光谱图; (d) 17.4 m处相机采集条纹
Fig. 6. Experimental results of chirped pulse interferometry: (a) Spectrogram at 2.9 m; (b) captured camera fringes at 2.9 m; (c) spectrogram at 17.4 m; (d) captured camera fringes at 17.4 m.
-
[1] Newbury N R 2011 Nat. Photonics 5 186
Google Scholar
[2] Diddams S A, Vahala K, Udem T 2020 Science 369 3676
Google Scholar
[3] Fortier T, Baumann E 2019 Commun. Phys. 2 153
Google Scholar
[4] Udem T, Holzwarth R, Hänsch T W 2002 Nature 416 233
Google Scholar
[5] Lamb E S, Carlson D R, Hickstein D D, Stone J R, Diddams S A, Papp S B 2018 Phys. Rev. A 9 024030
Google Scholar
[6] Coddington I, Newbury N, Swann W 2016 Optica 3 414
Google Scholar
[7] Picqué N, Hänsch T W 2019 Nat. Photonics 13 146
Google Scholar
[8] McCracken R A, Charsley J M, Reid D T 2017 Opt. Express 25 15058
Google Scholar
[9] Roztocki P, Morandotti R 2019 Nat. Astron. 3 135
Google Scholar
[10] 周维虎, 石俊凯, 纪荣祎, 黎尧, 刘娅 2017 仪器仪表学报 38 1859
Google Scholar
Zhou W H, Shi J K, Ji R Y, Li Y, Liu Y 2017 J. Sci. Instrum. 38 1859
Google Scholar
[11] Jang Y S, Kim S W 2018 Nanomanuf. Metrol. 1 131
Google Scholar
[12] Lee J, Kim Y J, Lee K, Lee S, Kim S W 2010 Nat. Photonics 4 716
Google Scholar
[13] Wu H Z, Zhang F M, Liu T Y, Balling P, Li J S, Qu X H 2016 Opt. Lett. 41 2366
Google Scholar
[14] 彭博, 曲兴华, 张福民, 张天宇, 张铁犁, 刘晓旭, 谢阳 2018 物理学报 67 210601
Google Scholar
Peng B, Qu X H, Zhang F M, Zhang T Y, Zhang T L, Liu X X, Xie Y 2018 Acta Phys. Sin. 67 210601
Google Scholar
[15] Wang G, Jang Y S, Hyun S, Chun B J, Kang H J, Yan S, Kim S W, Kim Y J 2015 Opt. Express 23 9121
Google Scholar
[16] Minoshima K, Matsumoto H 2000 Appl. Opt. 39 5512
Google Scholar
[17] Doloca N R, Meiners-Hagen K, Wedde M 2010 Meas. Sci. Technol. 21 115302
Google Scholar
[18] Gil-Molina A, Castañeda J A, Londono-Giraldo D F, Gabrielli L H, Cárdenas A M, Fragnito H L 2020 Opt. Express 28 4258
Google Scholar
[19] Uribe-Patarroyo N, Kassani S H, Villiger M, Bouma B E 2018 Opt. Express 26 9081
Google Scholar
[20] Atalar O, Millar D S, Wang P, Koike-Akino T, Kojima K, Orlik P V, Parsons K 2020 Opt. Express 28 37798
Google Scholar
[21] Joo K N, Kim S W 2006 Opt. Express 14 5954
Google Scholar
[22] Wu H Z, Zhang F M, Liu T Y, Meng F, Li J S, Qu X H 2015 Opt. Express 23 31582
Google Scholar
[23] Coddington I, Swann W C, Nenadovic L, Newbury N R 2009 Nat. Photonics 3 351
Google Scholar
[24] Liu T A, Newbury N R, Coddington I 2011 Opt. Express 19 18501
Google Scholar
[25] Ideguchi T, Poisson A, Guelachvili G, Picqué N, Hänsch T W 2014 Nat. Commun. 5 3375
Google Scholar
[26] 刘亭洋, 张福民, 吴翰钟, 李建双, 石永强, 曲兴华 2016 物理学报 65 020601
Google Scholar
Liu T Y, Zhang F M, Wu H Z, Li J S, Shi Y Q, Qu X H 2016 Acta Phys. Sin. 65 020601
Google Scholar
[27] Wu H Z, Zhang F M, Liu T Y, Li J S, Qu X H 2016 Opt. Express 24 24361
Google Scholar
[28] Ciddor P E 1996 Appl. Opt. 35 1566
Google Scholar

 下载:
下载:


计量
- 文章访问数: 10559
- PDF下载量: 173
- 被引次数: 0
