










-
从关联成像理论出发, 提出了日光场在实际大气湍流环境中强度点对点自关联成像理论, 并进行了实验验证, 分析了太阳光强度二阶自关联成像和强度点对点二阶自关联成像的区别. 研究结果表明, 太阳光场的点对点四阶自关联, 即强度的二阶点对点自关联, 可实现消大气湍流成像. 为验证理论有效性, 利用外场实验进行了验证, 获得优于17 km距离的消湍流成像结果. 理论和实验均表明, 太阳光强度涨落的点对点自关联可实现消大气湍流成像. 相比于相机直接成像, 本文成像方法消除了大气湍流影响, 同时该方案极大提升了关联成像技术的实用性, 可直接用于远距离消大气湍流的高质量成像, 增加图像识别率. 理论表明, 任何成像过程中波前受相位扰动影响的波段, 如红外、紫外等, 均可利用本文方法消除影响, 成果具有较大实用价值.Since its first experimental demonstration in 1995, ghost imaging has attracted a great deal of attention due to its potential applications. In Yanhua Shih’s paper (Meyers R E, Deacon K S, Shih Y H 2011 Appl. Phys. Lett. 98 111115; Meyers R E, Deacon K S, Shih Y H 2012 Appl. Phys. Lett. 100 131114), he pointed out that " one of the useful features is the turbulence insensitivity of thermal light ghost imaging, i.e., atmospheric turbulence would not have any influence on the ghost images of sunlight”. However, in Jeffrey H. Shapiro’s view (Shapiro J H 2012 arXiv:1201.4513 [quant-ph]), lens-less pseudo-thermal ghost imaging is not immune to spatial resolution loss from the presence of atmospheric turbulence along the propagation paths, unless the source diameter is less than the source-plane turbulence coherence length. In the present paper, we find that the second order self-correlation of sunlight intensity is the case that can be satisfied with both theories of Shih and Shapiro. In this paper, the second order self-correlation of sunlight intensity (the intensity variance of the images acquired by the CCD camera), rather than the total intensity correlation between images and bucket detector signals (the traditional ghost imaging method), is calculated to recover the high-quality images in turbulent atmosphere under a few hundred measurements. Inspired by Boyd’s paper, titled " thermal ghost imaging with averaged speckle patterns” (Zerom P, Shi Z, O’Sullivan M N, Chan K W C, Krogstad M, Shapiro J H, Boyd R W 2012 Phys. Rev. A 86 063817), turbulence insensitivity of sunlight ghost imaging is demonstrated both theoretically and experimentally in this article. It is found that thermal ghost imaging system whose coherence time need not to be controlled to match the speed of the detectors, ghost imaging with sunlight, which has always been considered intriguing and highly desirable, now is realizable. We present theoretical and experimental results showing that a sunlight self-correlation ghost imaging system can produce high-quality images even when it uses an slow detector and passes through the turbulence near ground, as long as the signal variation is predominantly caused by the fluctuation of the sunlight intensity rather than other noise sources. Our scheme can also be used to improve the image quality in other wave bands such as infrared and ultraviolet, in the case where an poor image quality results from the turbulence or other random disturbances on the wavefront.
-
Keywords:
- self-correlation /
- ghost imaging /
- turbulent atmosphere
[1] Cheng J 2009 Opt. Express 17 7916
 Google Scholar
Google Scholar
[2] Li C, Wang T, Pu J, Zhu W, Rao R 2010 Appl. Phys. B 99 599
Google Scholar
[3] Zhang P L, Gong W L, Han S S 2010 Phys. Rev. A 82 033817
Google Scholar
[4] Meyers R E, Deacon K S, Shih Y H 2011 Appl. Phys. Lett. 98 111115
Google Scholar
[5] Meyers R E, Deacon K S, Shih Y H 2012 Appl. Phys. Lett. 100 131114
Google Scholar
[6] Shapiro J H 2012 arXiv:1201.4513 [quant-ph]
[7] Gong W L, Han S S 2009 arXiv:0911.4750[quant-ph]
[8] Chen M L, Li E R, Gong W L, Xu X Y, Zhao C Q, Shen X, Xu W D, Han S S 2013 Opt. Photon. J. 3 83
Google Scholar
[9] Wang C L, Mei X, Pan L, Wang P, Li W, Gao X, Bo Z, Chen M L, Gong W, Han S S 2018 Remote Sens. 10 732
Google Scholar
[10] Zerom P, Shi Z, O’Sullivan M N, Chan K W C, Krogstad M, Shapiro J H, Robert W, Boyd 2012 Phys. Rev. A 86 063817
Google Scholar
[11] 顾德曼 J W 著 (陈家璧, 秦克诚, 曹其智 译) 2018 统计光学(第二版) (科学出版社) 第326页
Goodman J W (translated by Chen J B, Qing K C, Cao Q Z) 2000 Statistical Optics (2nd Ed.) (Beijing: Science Press) p326 (in Chinese)
[12] 陈玉良 1991 广播与电视技术 1 30
Chen Y L 1991 Radio TV Broadcast Eng. 1 30
[13] 翁宁泉, 曾宗泳, 肖黎明, 马成胜, 龚知本 1999 强激光与粒子束 11 673
Weng N Q, Zeng Z Y, Xiao L M, Ma C S, Gong Z B 1999 High Power Laser and Particle Beams 11 673
[14] Smith T A, Shih Y 2018 Phys. Rev. Lett. 120 063606
Google Scholar
[15] Baykal Y, Plonus M A 1983 J. Opt. Soc. Am. 73 831
Google Scholar
[16] Baykal Y, Plonus M A 1985 J. Opt. Soc. Am. A 2 2124
Google Scholar
[17] 李明飞, 莫小范, 张安宁 2016 导航与控制 5 1
Google Scholar
Li M F, Mo X F, Zhang A N 2016 Navigtion and Control 5 1
Google Scholar
[18] 李明飞, 莫小范, 赵连洁, 霍娟, 杨然, 李凯, 张安宁 2015 物理学报 65 064201
Google Scholar
Li M F, Mo X F, Zhao L J, Huo J, Yang R, Li K, Zhang A N 2015 Acta Phys. Sin. 65 064201
Google Scholar
[19] Welsh S S, Edgar M P, Bowman R, Jonathan P, Sun B Q, Padgett M J 2013 Opt. Express 21 23068
Google Scholar
[20] Huynh-Thu Q, Ghanbari M 2008 Electron. Lett. 44 800
Google Scholar
[21] Li D, Mersereau R M, Simske S 2007 IEEE Geosci. Remote Sens. Lett. 4 340
Google Scholar
-

图 2 目标物体(成像目标: 北京中央广播电视塔, 200 m附近拍摄图像, 放大区域为成像区域; 在数字地图GPS定位下目标与实验地点距离
$L=L_{2}=17.2\ \rm{km}$ )Fig. 2. Target photo is taken from about 200 m. The object is the Beijing Central Radio and TV Tower with the distance from our experimental location is about L =
$L_{2}=17.2\ \rm{km}$ measured by GPS in digital map.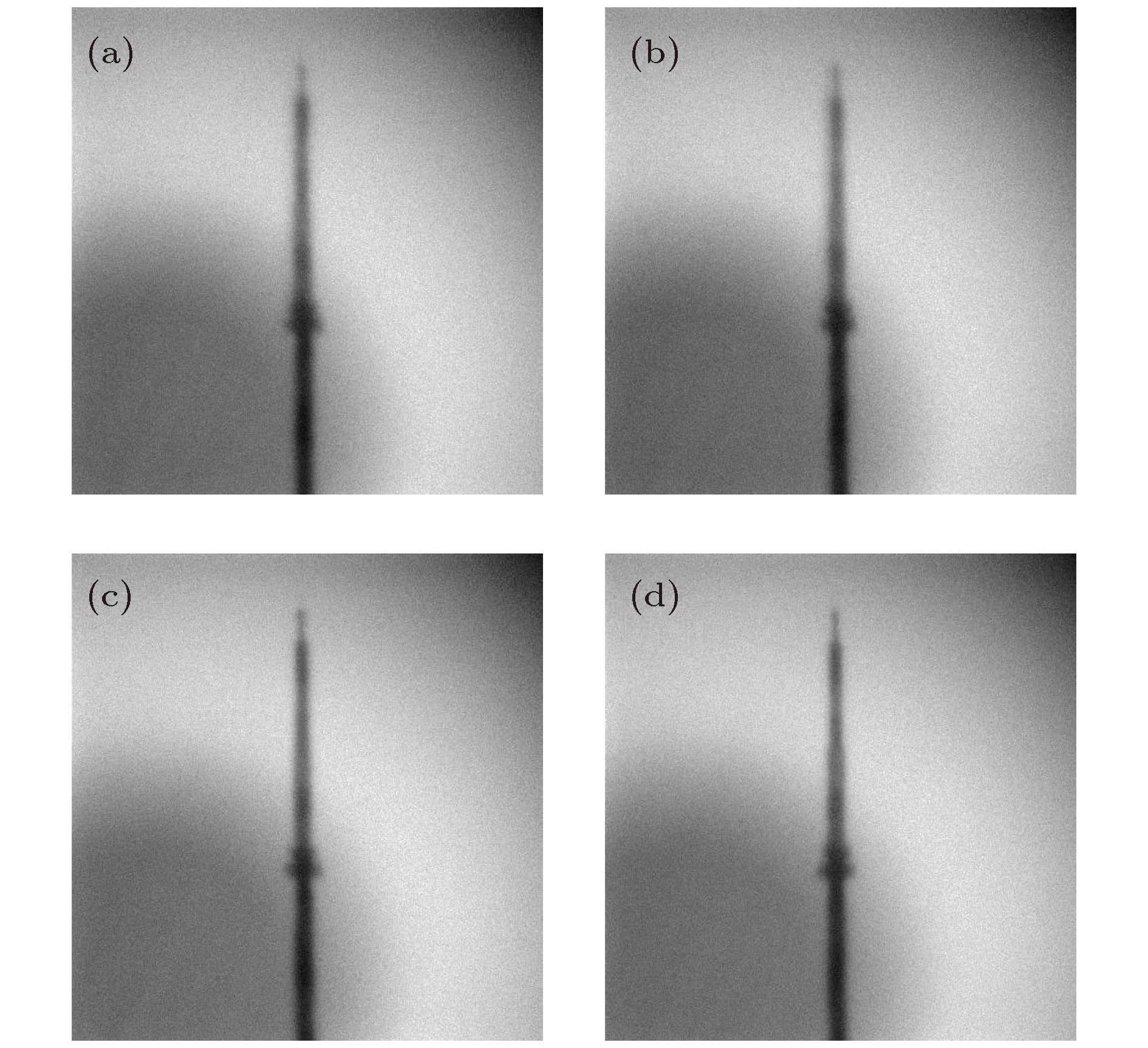
图 3 实验系统中CCD相机拍摄图像 (a), (b), (c)和(d)为不同时间连续拍摄获得
Fig. 3. Images snapped by CCD camera: (a), (b), (c) and (d) are four snapped images with 100 μs exposure time.

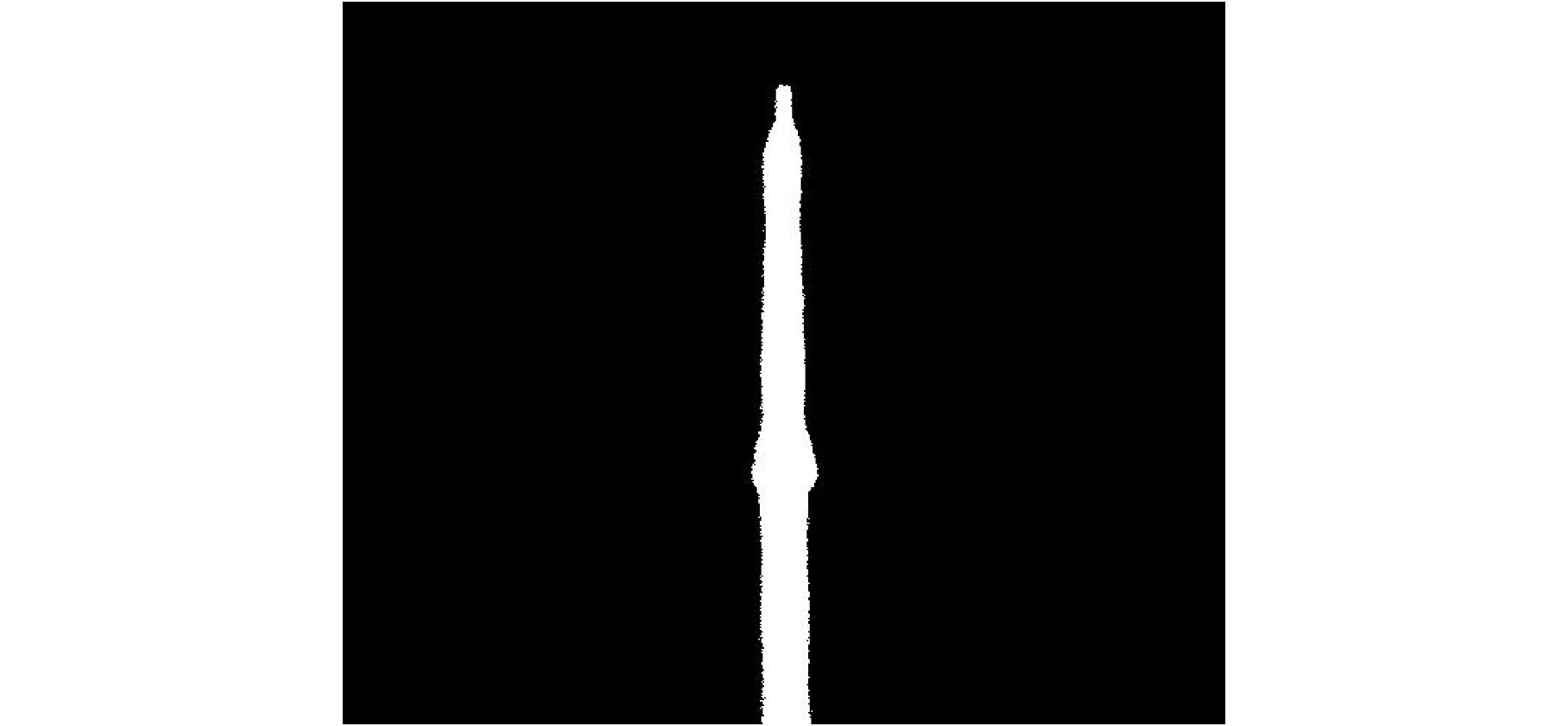
图 4 实验测试结果 (a) CCD单次曝光成像; (b)测量次数
$M=500$ 累加平均图像; (c) 传统强度涨落关联成像; (d)强度自关联成像, 或强度方差成像Fig. 4. Experimental results: (a) Single shot image; (b) image averaged by 500 frames; (c) intensity fluctuation correlated imaging; (d) second order sunlight intensity self-correlation imaging.
-
[1] Cheng J 2009 Opt. Express 17 7916
Google Scholar
[2] Li C, Wang T, Pu J, Zhu W, Rao R 2010 Appl. Phys. B 99 599
Google Scholar
[3] Zhang P L, Gong W L, Han S S 2010 Phys. Rev. A 82 033817
Google Scholar
[4] Meyers R E, Deacon K S, Shih Y H 2011 Appl. Phys. Lett. 98 111115
Google Scholar
[5] Meyers R E, Deacon K S, Shih Y H 2012 Appl. Phys. Lett. 100 131114
Google Scholar
[6] Shapiro J H 2012 arXiv:1201.4513 [quant-ph]
[7] Gong W L, Han S S 2009 arXiv:0911.4750[quant-ph]
[8] Chen M L, Li E R, Gong W L, Xu X Y, Zhao C Q, Shen X, Xu W D, Han S S 2013 Opt. Photon. J. 3 83
Google Scholar
[9] Wang C L, Mei X, Pan L, Wang P, Li W, Gao X, Bo Z, Chen M L, Gong W, Han S S 2018 Remote Sens. 10 732
Google Scholar
[10] Zerom P, Shi Z, O’Sullivan M N, Chan K W C, Krogstad M, Shapiro J H, Robert W, Boyd 2012 Phys. Rev. A 86 063817
Google Scholar
[11] 顾德曼 J W 著 (陈家璧, 秦克诚, 曹其智 译) 2018 统计光学(第二版) (科学出版社) 第326页
Goodman J W (translated by Chen J B, Qing K C, Cao Q Z) 2000 Statistical Optics (2nd Ed.) (Beijing: Science Press) p326 (in Chinese)
[12] 陈玉良 1991 广播与电视技术 1 30
Chen Y L 1991 Radio TV Broadcast Eng. 1 30
[13] 翁宁泉, 曾宗泳, 肖黎明, 马成胜, 龚知本 1999 强激光与粒子束 11 673
Weng N Q, Zeng Z Y, Xiao L M, Ma C S, Gong Z B 1999 High Power Laser and Particle Beams 11 673
[14] Smith T A, Shih Y 2018 Phys. Rev. Lett. 120 063606
Google Scholar
[15] Baykal Y, Plonus M A 1983 J. Opt. Soc. Am. 73 831
Google Scholar
[16] Baykal Y, Plonus M A 1985 J. Opt. Soc. Am. A 2 2124
Google Scholar
[17] 李明飞, 莫小范, 张安宁 2016 导航与控制 5 1
Google Scholar
Li M F, Mo X F, Zhang A N 2016 Navigtion and Control 5 1
Google Scholar
[18] 李明飞, 莫小范, 赵连洁, 霍娟, 杨然, 李凯, 张安宁 2015 物理学报 65 064201
Google Scholar
Li M F, Mo X F, Zhao L J, Huo J, Yang R, Li K, Zhang A N 2015 Acta Phys. Sin. 65 064201
Google Scholar
[19] Welsh S S, Edgar M P, Bowman R, Jonathan P, Sun B Q, Padgett M J 2013 Opt. Express 21 23068
Google Scholar
[20] Huynh-Thu Q, Ghanbari M 2008 Electron. Lett. 44 800
Google Scholar
[21] Li D, Mersereau R M, Simske S 2007 IEEE Geosci. Remote Sens. Lett. 4 340
Google Scholar


 下载:
下载:



计量
- 文章访问数: 13154
- PDF下载量: 108
- 被引次数: 0
