










-
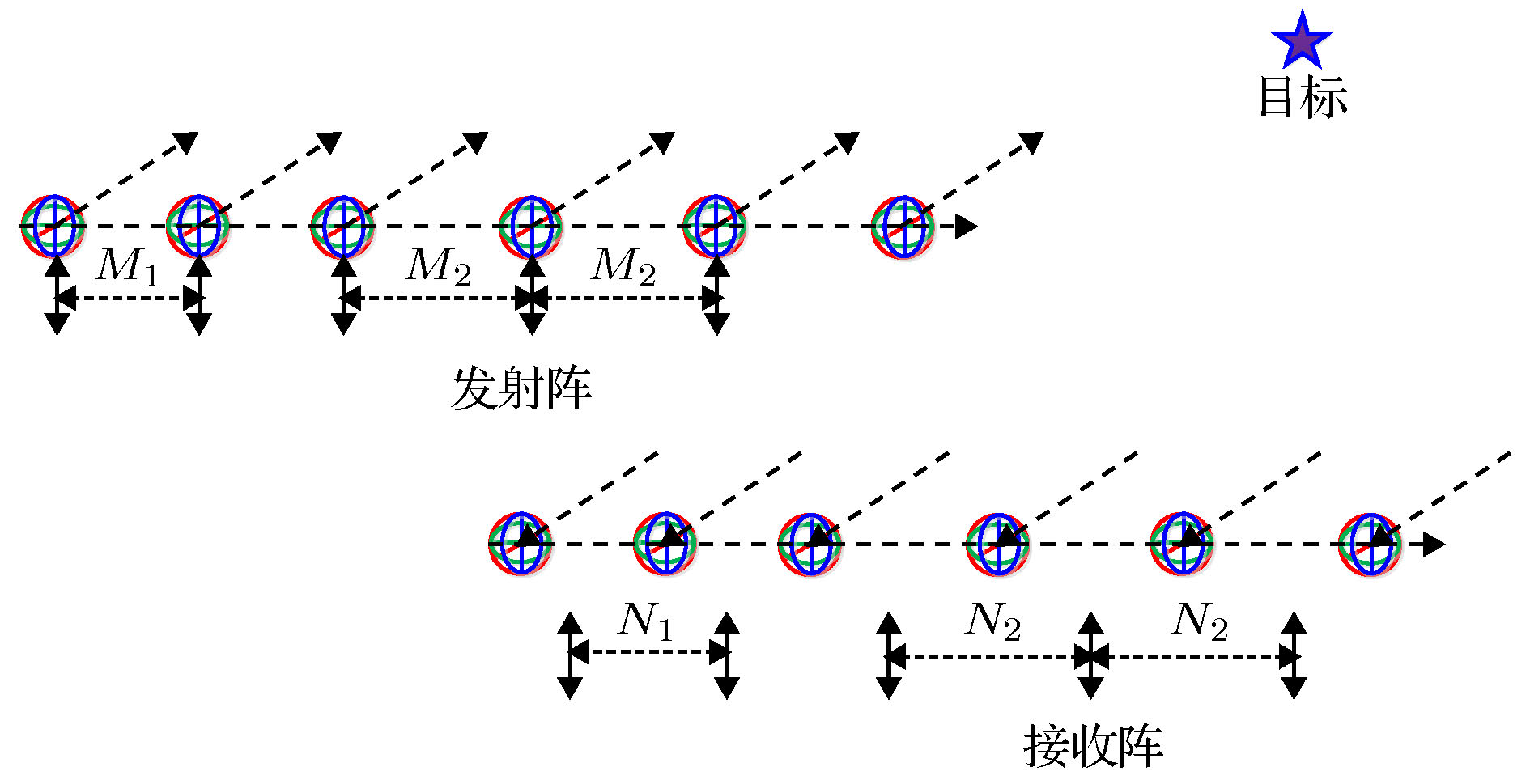
针对双基地电磁矢量传感器多输入多输出(electromagnetic vector sensors multiple-input multiple-output, EMVS-MIMO)雷达参数估计精度以及角度参数配对问题, 通过设计一种新的稀疏阵列和采用自动参数配对算法来实现高分辨的角度参数和极化参数联合估计. 首先, 通过设计稀疏的发射阵列和接收阵列来实现对EMVS-MIMO雷达阵列孔径的扩展; 然后, 提出平行因子-三线性分解算法对接收数据的三阶张量模型进行求解. 所提出的平行因子-三线性分解算法能够实现二维发射角、二维接收角、极化相位角和极化相位差的联合参数自动配对; 且针对估计得到的发射导向矢量矩阵和接收导向矢量矩阵, 根据旋转不变特性可以实现高精度的发射俯仰角和接收俯仰角测量. 在得到精确的发射俯仰角和接收俯仰角之后, 相应的发射和接收方位角、极化角和极化相位差可以通过矢量叉积算法来进行估计. 相比于现有算法, 所提出的算法能够避免高维数据奇异值分解以及额外的参数配对过程; 且通过稀疏阵列设计, 角度参数估计精度能够进一步地提升, 仿真结果表明所提出的算法具有优良的角度参数估计性能.
-
关键词:
- 稀疏阵列 /
- 双基地电磁矢量传感器多输入多输出雷达 /
- 平行因子-三线性分解 /
- 联合参数估计
In this paper, a new sparse transmitting and receiving array is designed to improve the joint angle and polarization parameter estimation performance for bistatic electromagnetic vector sensors Multiple-Input Multiple-Output radar. Firstly, large array aperture can be obtained with the aid of the sparse transmitting and receiving array. Then, an effective third-order tensor model is constructed in order to make full use of the multidimensional space-time characteristics of output data after matching filtering. And, the Parallel Factor trilinear alternating least square algorithm is proposed to deal with the constructed third-order tensor model, which can yield closed-form automatically paired two dimensional Direction of Departure and two dimensional Direction of Departure estimation without additional angle pair matching process. Furthermore, two sets of high accuracy rotation invariance relationships corresponding to transmit elevation angle and receive elevation angle can be achieved by using the estimated transmit steering vector matrix and receive steering vector matrix. After the accuracy transmit elevation angle and receive angle are obtained, the corresponding transmitting and receiving azimuth angle, polarization angle and polarization phase difference can be accurately estimated by using the vector-cross-product algorithm. Compared with existing algorithms, the proposed algorithm can avoid high dimensional eigenvalue decomposition and additional parameter matching process. Moreover, the high estimation performance of the proposed can be further guaranteed by using the designed sparse array. Finally, simulation results demonstrate the effectiveness and superiority of the proposed method in terms of estimation accuracy and angle resolution.-
Keywords:
- sparse array /
- bistatic electromagnetic vector sensors multiple-input multiple-output radar /
- parallel factor trilinear alternating least square /
- joint parameter estimation
[1] Wang X P, Wang L Y, Li X M, Bi G A 2017 Signal Process. 135 147
 Google Scholar
Google Scholar
[2] Wang X P, Wan L T, Huang M X, Shen C, Zhang K 2019 IEEE J. Sel. Topics Signal Process. 13 1001
Google Scholar
[3] Xie Q P, Pan X Y, Huang M, Chen J Y, Xiao S P 2019 IEEE Access 7 107805
Google Scholar
[4] Li J, Stoica P 2007 IEEE Signal Process. Mag. 5 106
[5] Zhang X F, Xu L Y, Xu L, Xu D Z 2010 IEEE Commun. Lett. 14 1161
Google Scholar
[6] Zhang X F, Xu D Z 2010 Electron. Lett. 12 860
[7] Chen D F, Chen B X, Qin G D 2008 Electron. Lett. 44 770
Google Scholar
[8] Chen J L, Gu H, Song W M 2008 Electron. Lett. 44 1422
Google Scholar
[9] Bencheikh M L, Wang Y D, He H Y 2010 Signal Process. 90 2723
[10] Xia T Q 2015 Signal Process. 108 159
Google Scholar
[11] Xia T Q 2015 Signal Process. 116 7
Google Scholar
[12] Wang X P, Wang W, Liu J, Liu Q, Wang B 2015 Signal Process. 116 152
Google Scholar
[13] Wen F Q, Xiong X D, Su J, Zhang Z J 2017 Signal Process. 134 261
Google Scholar
[14] Xu B Q, Zhao Y B 2019 Signal Process. 157 88
Google Scholar
[15] Li L, Younan N H, Shi X F 2019 Sensors 19 1
Google Scholar
[16] Chen J L, Zhou Q G, Li J Q, Zhu Y P 2019 IET Radar Sonar Navigat. 13 1180
Google Scholar
[17] Chen J L, Zhang T X, Li J Q, Chen X 2019 IEEE Sensors J. 19 5384
Google Scholar
[18] Wong K T, Zoltowski M D 1997 IEEE Trans. Antennas Propag. 45 1467
Google Scholar
[19] Chintagunta S, Ponnusamy P 2018 Signal Process. 147 163
Google Scholar
[20] Liu T T, Wen F Q, Shi J P, Gong Z H, Xu H 2019 IEEE Access 7 120533
Google Scholar
[21] Mao C X, Shi J P, Wen F Q 2019 IEEE Access 7 163119
Google Scholar
[22] Sidiropoulos N D, Bro R, Giannakis G B 2000 IEEE Trans. Signal Process. 48 2377
Google Scholar
[23] Stoica P, Nehorai A 1989 IEEE Trans. Acoust. Speech Signal Process. 37 720
Google Scholar
-
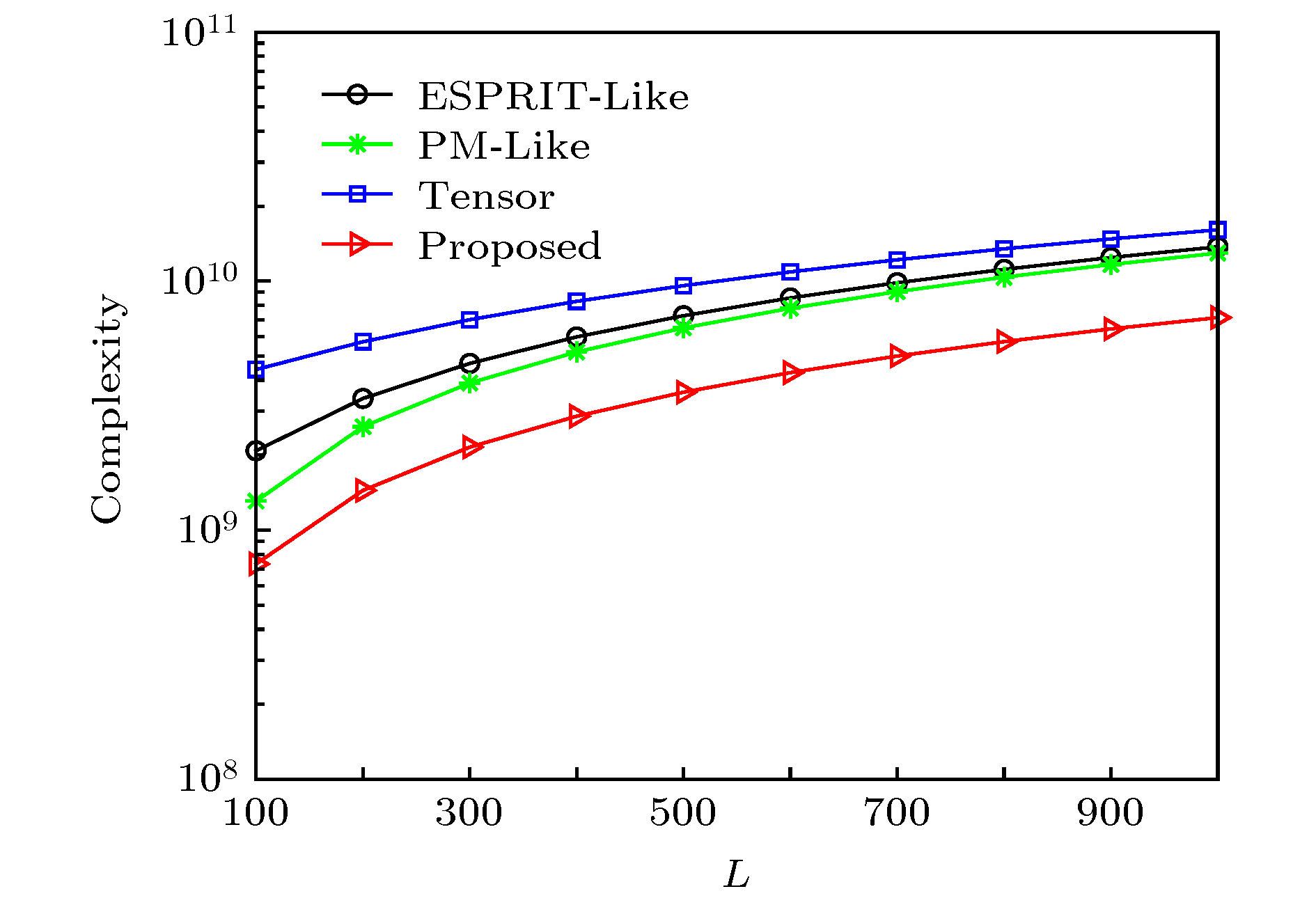
图 2 不同算法的计算复杂度随快拍数的变化
Fig. 2. Comparison of computational complexity versus different snapshots number.
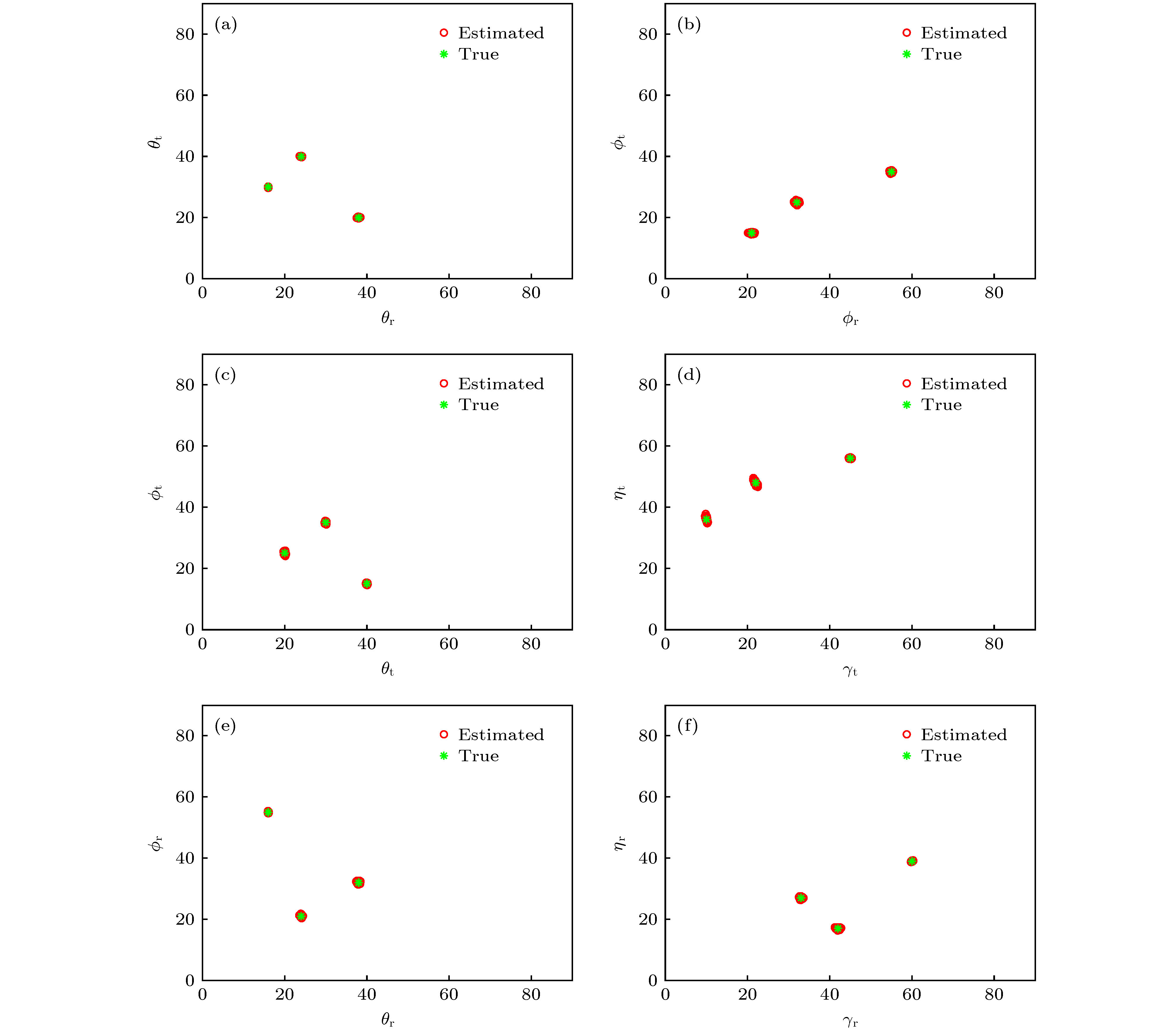
图 3 所提算法角度参数和极化参数估计星座图 (a) 发射俯仰角和接收俯仰角; (b) 发射方位角和接收方位角; (c) 发射俯仰角和发射方位角; (d) 发射极化角和极化相位差; (e) 接收俯仰角和接收方位角; (f) 接收极化角和极化相位差
Fig. 3. Scatter plot of the angle parameters and polarization parameters by using the proposed method: (a) Scatter plot of the transmit elevation angle and receive elevation angle; (b) scatter plot of the transmit azimuth angle and receive azimuth angle; (c) scatter plot of the transmit elevation angle and azimuth angle; (d) scatter plot of the transmit polarization angle and polarization phase difference; (e) scatter plot of the receive elevation angle and azimuth angle; (f) scatter plot of the receive polarization angle and polarization phase difference.
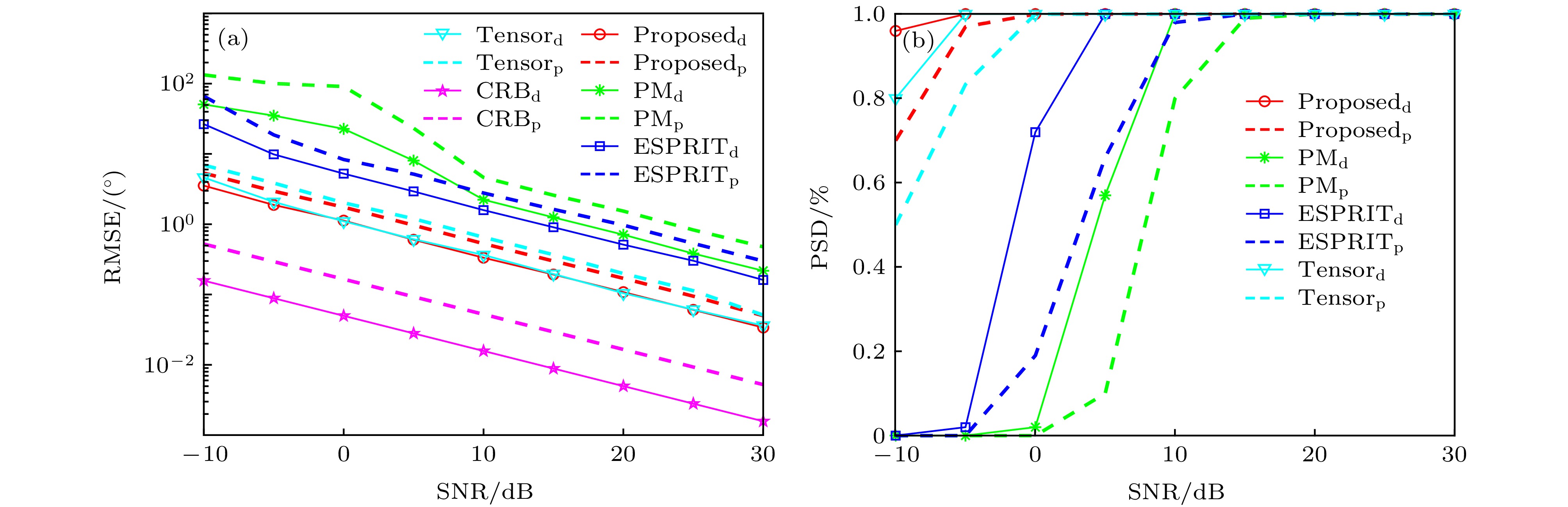
图 4 信噪比对算法的影响 (a) 均方误差随信噪比的变化; (b) 检测概率随信噪比的变化
Fig. 4. The effect of the SNR for different methods: (a) Curves of RMSE versus SNR; (b) curves of PSD versus SNR.
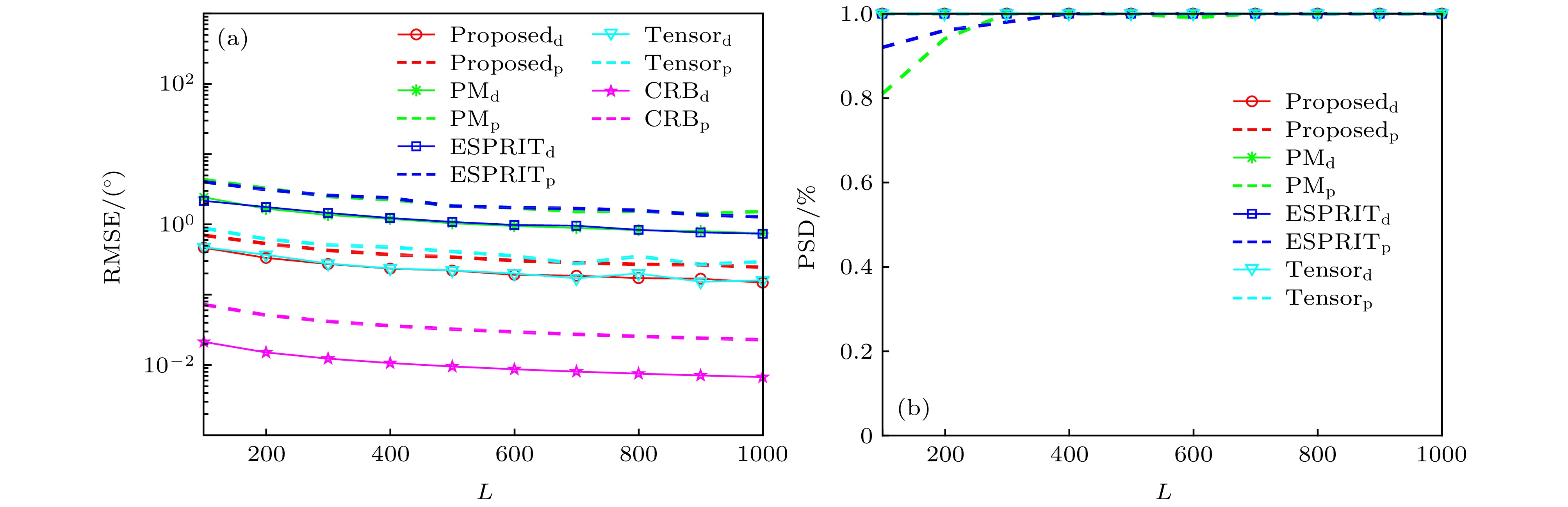
图 5 快拍数对算法的影响 (a) 均方误差随快拍数的变化; (b) 检测概率随快拍数的变化
Fig. 5. The effect of the snapshot for different methods: (a) Curves of RMSE versus snapshot; (b) curves of PSD versus snapshot.

图 6 不同算法的目标分辨力比较 (a) 均方误差随角度间隔的变化; (b) 检测概率随角度间隔的变化
Fig. 6. Comparison of target resolution ability of different methods: (a) curves of RMSE versus angular separation; (b) curves of PSD versus angular separation.
表 1 不同算法的计算复杂度对比
Table 1. Computational complexity comparison of different methods.
算法类型 计算复杂度 计算时间/s ESPRIT-Like算法 [19] $\begin{aligned}& o((6 M)^2(6N)^2L + (6 M)^3(6 N)^3 + 2K^26(N + M - 2) + 6{K^3} \\ & + 7(M + N){K^2} + 12 K + 36 MN(36 MN - K) + (36 MN - K){K^2}) \end{aligned} $ 28.332 PM-Like算法 [20] $\begin{aligned}& o((6M)^2(6N)^2L + 72MN{K^2} + 2{K^2}6 (N + M - 2) + 6{K^3} \\& + 7( {M + N} ) {K^2} + 12K + 36MN({36MN - K}) + (36MN - K){K^2})\end{aligned} $ 2.0698 Tensor子空间算法 [21] $\begin{aligned} & o((6 M)^2(6N)^2L + 4(6M)^3(6N)^3 + 2K^2 6(N + M - 2) + 6{K^3} \\& + 7( {M + N} ) K^2 + 12 K + 36 MN( {36 MN - K} ) + (36 MN - K)K^2) \end{aligned} $ 109.880 所提算法 $\begin{aligned}& o(\kappa ( 3K^3+ 108 MNKL + 3K^2) + \kappa (3K^2(36 MN + 6 NL + 6 ML)) \\ & + 2{K^2}6({N + M - 2} ) + 6{K^3} + 7(M + N){K^2} + 12K) \end{aligned} $ 0.5684  下载: 导出CSV
下载: 导出CSV
表 2 目标回波参数表
Table 2. Parameters of target signals.
目标 方位角
θ/(°)俯仰角
ϕ/(°)极化角
γ/(°)极化相位差
η/(°)1 $40/24$ $15/21$ $10/42$ $38/17$ 2 $20/38$ $25/32$ $22/33$ $48/27$ 3 $30/16$ $35/55$ $45/60$ $56/39$
下载: 导出CSV
-
[1] Wang X P, Wang L Y, Li X M, Bi G A 2017 Signal Process. 135 147
Google Scholar
[2] Wang X P, Wan L T, Huang M X, Shen C, Zhang K 2019 IEEE J. Sel. Topics Signal Process. 13 1001
Google Scholar
[3] Xie Q P, Pan X Y, Huang M, Chen J Y, Xiao S P 2019 IEEE Access 7 107805
Google Scholar
[4] Li J, Stoica P 2007 IEEE Signal Process. Mag. 5 106
[5] Zhang X F, Xu L Y, Xu L, Xu D Z 2010 IEEE Commun. Lett. 14 1161
Google Scholar
[6] Zhang X F, Xu D Z 2010 Electron. Lett. 12 860
[7] Chen D F, Chen B X, Qin G D 2008 Electron. Lett. 44 770
Google Scholar
[8] Chen J L, Gu H, Song W M 2008 Electron. Lett. 44 1422
Google Scholar
[9] Bencheikh M L, Wang Y D, He H Y 2010 Signal Process. 90 2723
[10] Xia T Q 2015 Signal Process. 108 159
Google Scholar
[11] Xia T Q 2015 Signal Process. 116 7
Google Scholar
[12] Wang X P, Wang W, Liu J, Liu Q, Wang B 2015 Signal Process. 116 152
Google Scholar
[13] Wen F Q, Xiong X D, Su J, Zhang Z J 2017 Signal Process. 134 261
Google Scholar
[14] Xu B Q, Zhao Y B 2019 Signal Process. 157 88
Google Scholar
[15] Li L, Younan N H, Shi X F 2019 Sensors 19 1
Google Scholar
[16] Chen J L, Zhou Q G, Li J Q, Zhu Y P 2019 IET Radar Sonar Navigat. 13 1180
Google Scholar
[17] Chen J L, Zhang T X, Li J Q, Chen X 2019 IEEE Sensors J. 19 5384
Google Scholar
[18] Wong K T, Zoltowski M D 1997 IEEE Trans. Antennas Propag. 45 1467
Google Scholar
[19] Chintagunta S, Ponnusamy P 2018 Signal Process. 147 163
Google Scholar
[20] Liu T T, Wen F Q, Shi J P, Gong Z H, Xu H 2019 IEEE Access 7 120533
Google Scholar
[21] Mao C X, Shi J P, Wen F Q 2019 IEEE Access 7 163119
Google Scholar
[22] Sidiropoulos N D, Bro R, Giannakis G B 2000 IEEE Trans. Signal Process. 48 2377
Google Scholar
[23] Stoica P, Nehorai A 1989 IEEE Trans. Acoust. Speech Signal Process. 37 720
Google Scholar

 下载:
下载:
计量
- 文章访问数: 12532
- PDF下载量: 140
- 被引次数: 0
