










-
重力场是反映地球质量分布及变化的重要参数, 动态重力测量在地质调查、地球物理、资源勘探等领域有着重要应用. 目前动态重力测量均基于相对测量原理, 动态相对重力仪存在零点漂移问题, 影响其测量性能. 动态绝对重力仪可以为相对重力仪提供同步同址校准, 解决其长漂问题, 因此备受关注. 本文基于原子重力仪和惯性稳定平台, 搭建了一套船载绝对重力动态测量系统, 并在船载系泊状态下开展了绝对重力动态测量实验. 经评估, 船载系泊环境下的重力测量灵敏度为16.6 mGal/Hz–1/2, 1000 s积分时间内重力测量的分辨率可达0.7 mGal. 通过两周的绝对重力测量, 评估了系统的稳定性. 为了评估绝对重力的动态测量精度, 将船上测量点与码头高精度绝对重力基准点的绝对重力值进行了比较, 两点之间的绝对重力值差及其不确定度评估结果为(–0.072 ± 0.134) mGal. 本文结果为海洋相对重力仪的同时同船校准提供了一种新方案.The gravity field is one of the basic physical fields of the Earth. Dynamic measurements could improve the efficiency of gravity surveying and mapping, and have very important applications in the fields of geological survey, geophysics, resource exploration, inertial navigation and so on. Currently, dynamic gravity measurements are mostly based on relative measurements. The dynamic relative gravimeters have the problem of zero drift, which affects the measurement performance. Dynamic absolute gravimeters can provide synchronous and co-site calibration for relative gravimeters and solve the problem of long drift. Therefore dynamic absolute gravimeters have attracted much attention. Based on a homemade atomic gravimeter and an inertial stable platform, a system of absolute gravity dynamic measurement has been built on a ship. The dynamic measurement experiments of absolute gravity under the state of ship-borne mooring have been carried out. It is found that the frequency of vibration noises of this ship is around 0.2 Hz, and the amplitude is about 1 Gal. In the case of harsh environment, the temperature and humidity of the used container have been controlled to be 25 ℃ and 70% via the air conditioning. Then, a continuous gravity measurement of 5 hour has been taken, and the peak to peak value of 80 mGal has been achieved. The values of gravity have no drifts at all during the measurements. Besides, the sensitivity of gravity measurement has been evaluated to be 16.6 mGal/Hz–1/2 under the environment of ship-borne mooring. A resolution of 0.7 mGal could be reached with an integration time of 1000 s. The stability of this system has been estimated after the measurement of absolute gravity for two weeks, and the change of absolute gravity values is about 0.5 mGal. Finally, in order to evaluate the accuracy of the dynamic measurement of absolute gravity, the measured average value of absolute gravity at ship-borne has been compared with the value of the high-precision absolute gravity reference point of the pier, and the results are estimated to be (–0.072 ± 0.134) mGal. The results of this paper could provide a new solution for the simultaneous and co-site calibration of the ocean relative gravimeter on the same ship.
-
Keywords:
- cold atom /
- atom interferometer /
- atomic gravimeter /
- absolute gravity measurement
[1] Baumann H, Klingele E E, Marson I 2012 Geophys. Prospect. 60 361
 Google Scholar
Google Scholar
[2] Kasevich M, Chu S 1992 Appl. Phys. B 54 321
Google Scholar
[3] Peters A, Chung K Y, Chu S 2001 Metrologia 38 25
Google Scholar
[4] Freier C, Hauth M, Schkolnik V, Leykauf B, Schilling M, Wziontek H, Scherneck H G, Muller J, Peters A 2016 J. Phys. Conf. Ser. 723 012050
Google Scholar
[5] Wu X J, Zi F, Dudley J, Bilotta R J, Canoza P, Muller H 2017 Optica 4 1545
Google Scholar
[6] Wu B, Wang Z Y, Cheng B, Wang Q Y, Xu A P, Lin Q 2014 Metrologia 51 452
Google Scholar
[7] Zhang X W, Zhong J Q, Tang B, Chen X, Zhu L, Huang P W, Wang J, Zhan M S 2018 Appl. Opt. 57 6545
Google Scholar
[8] Luo Q, Zhang H, Zhang K, Duan X C, Hu Z K, Chen L L, Zhou M K 2019 Rev. Sci. Instrum. 90 043104
Google Scholar
[9] Menoret V, Vermeulen P, Le Moigne N, Bonvalot S, Bouyer P, Landragin A, Desruelle B 2018 Sci. Rep. 8 12300
Google Scholar
[10] Wu B, Zhu D, Cheng B, Wu L M, Wang K N, Wang Z Y, Shu Q, Li R, Wang H L, Wang X L, Lin Q 2019 Opt. Express 27 11252
Google Scholar
[11] Gillot P, Francis O, Landragin A, Dos Santos F P, Merlet S 2014 Metrologia 51 L15
Google Scholar
[12] Huang P W, Tang B, Chen X, Zhong J Q, Xiong Z Y, Zhou L, Wang J, Zhan M S 2019 Metrologia 56 045012
Google Scholar
[13] Fu Z J, Wang Q Y, Wang Z Y, Wu B, Cheng B, Lin Q 2019 Chin. Opt. Lett. 17 011204
Google Scholar
[14] Wang S K, Zhao Y, Zhuang W, Li T C, Wu S Q, Feng J Y, Li C J 2018 Metrologia 55 360
Google Scholar
[15] Hu Z K, Sun B L, Duan X C, Zhou M K, Chen L L, Zhan S, Zhang Q Z, Luo J 2013 Phys. Rev. A 88 043610
Google Scholar
[16] Bidel Y, Zahzam N, Blanchard C, Bonnin A, Cadoret M, Bresson A, Rouxel D, Lequentrec-Lalancette M F 2018 Nat. Commun. 9 9
Google Scholar
[17] Bidel Y, Zahzam N, Bresson A, Blanchard C, Cadoret M, Olesen A V, Forsberg R 2020 J. Geodesy 94 2
Google Scholar
[18] Wu X J, Pagel Z, Malek B S, Nguyen T H, Zi F, Scheirer D S, Muller H 2019 Sci. Adv. 5 eaax0800
Google Scholar
[19] 吴彬, 周寅, 程冰, 朱栋, 王凯楠, 朱欣欣, 陈佩军, 翁堪兴, 杨秋海, 林佳宏, 张凯军, 王河林, 林强 2020 物理学报 69 060302
Google Scholar
Wu B, Zhou Y, Cheng B, Zhu D, Wang K N, Zhu X X, Chen P J, Weng K X, Yang Q H, Lin J H, Zhang K J, Wang H L, Lin Q 2020 Acta Phys. Sin. 69 060302
Google Scholar
[20] Fu Z J, Wu B, Cheng B, Zhou Y, Weng K X, Zhu D, Wang Z Y, Lin Q 2019 Metrologia 56 025001
Google Scholar
[21] Mahadeswaraswamy C 2009 Ph. D. Dissertation (California: Stanford University)
[22] Bidel Y, Carraz O, Charriere R, Cadoret M, Zahzam N, Bresson A 2013 Appl. Phys. Lett. 102 144107
Google Scholar
[23] Geiger R, Ménoret V, Stern G, Zahzam N, Cheinet P, Battelier B, Villing A, Moron F, Lours M, Bidel Y, Bresson A, Landragin A, Bouyer P 2011 Nat. Commun. 2 474
Google Scholar
[24] Barrett B, Antoni-Micollier L, Chichet L, Battelier B, Lévèque T, Landragin A, Bouyer P 2016 Nat. Commun. 7 1
[25] Becker D, Lachmann M D, Seidel S T, Ahlers H, Dinkelaker A N, Grosse J, Hellmig O, Muentinga H, Schkolnik V, Wendrich T, Wenzlawski A, Weps B, Corgier R, Franz T, Gaaloul N, Herr W, Luedtke D, Popp M, Amri S, Duncker H, Erbe M, Kohfeldt A, Kubelka-Lange A, Braxmaier C, Charron E, Ertmer W, Krutzik M, Laemmerzahl C, Peters A, Schleich W P, Sengstock K, Walser R, Wicht A, Windpassinger P, Rasel E M 2018 Nature 562 391
Google Scholar
[26] Elliott E R, Krutzik M C, Williams J R, Thompson R J, Aveline D C 2018 NPJ Microgravity 4 1
Google Scholar
[27] Le Gouet J, Mehlstaubler T E, Kim J, Merlet S, Clairon A, Landragin A, Dos Santos F P 2008 Appl. Phys. B 92 133
Google Scholar
[28] 吴彬, 程冰, 付志杰, 朱栋, 周寅, 翁堪兴, 王肖隆, 林强 2018 物理学报 67 190302
Google Scholar
Wu B, Cheng B, Fu Z J, Zhu D, Zhou Y, Weng K X, Wang X L, Lin Q 2018 Acta Phys. Sin. 67 190302
Google Scholar
-

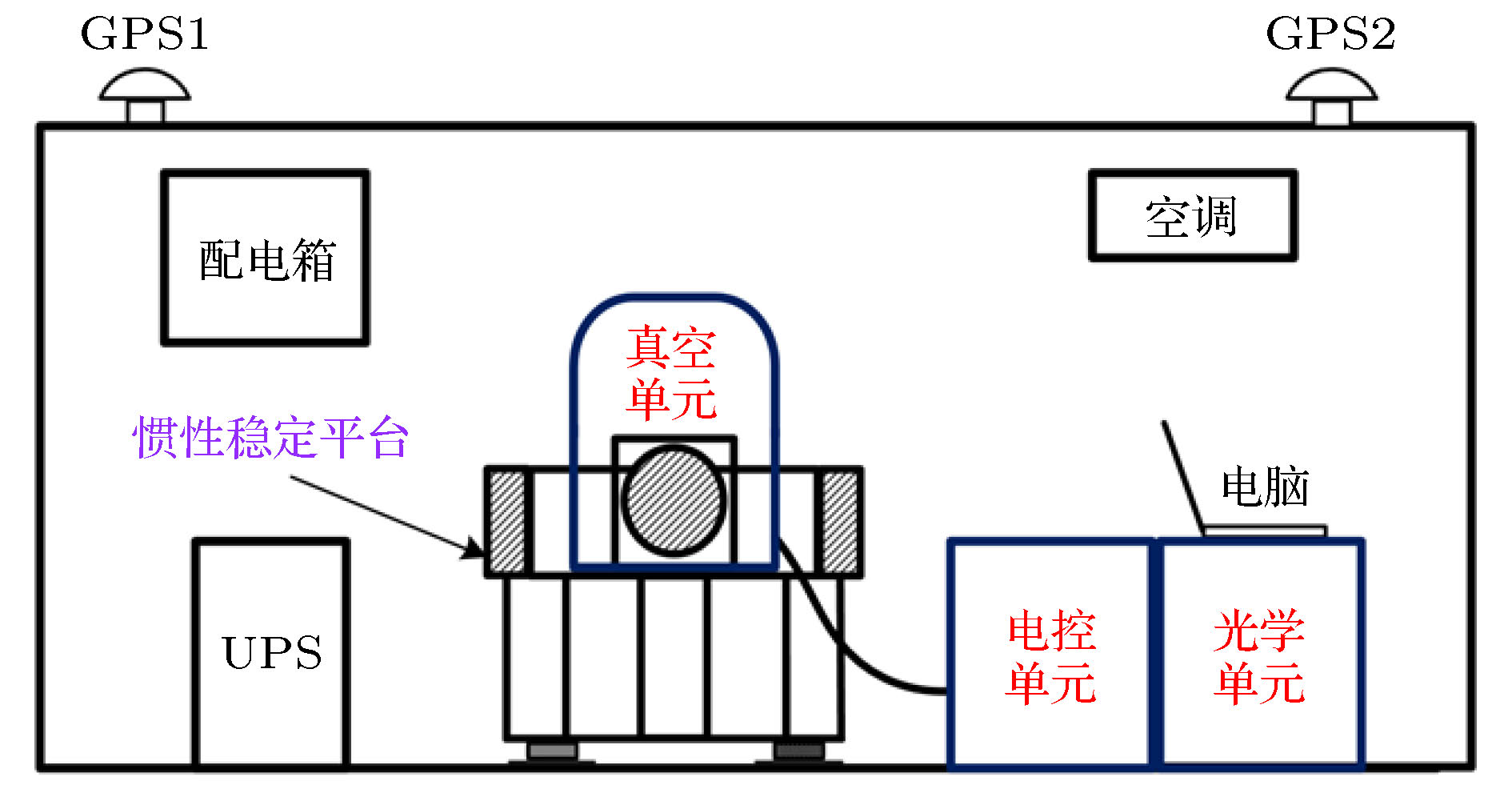
图 1 船载系泊状态下的绝对重力测量系统原理图
Fig. 1. The schematic diagram of absolute gravity measurement system under mooring state of a ship.
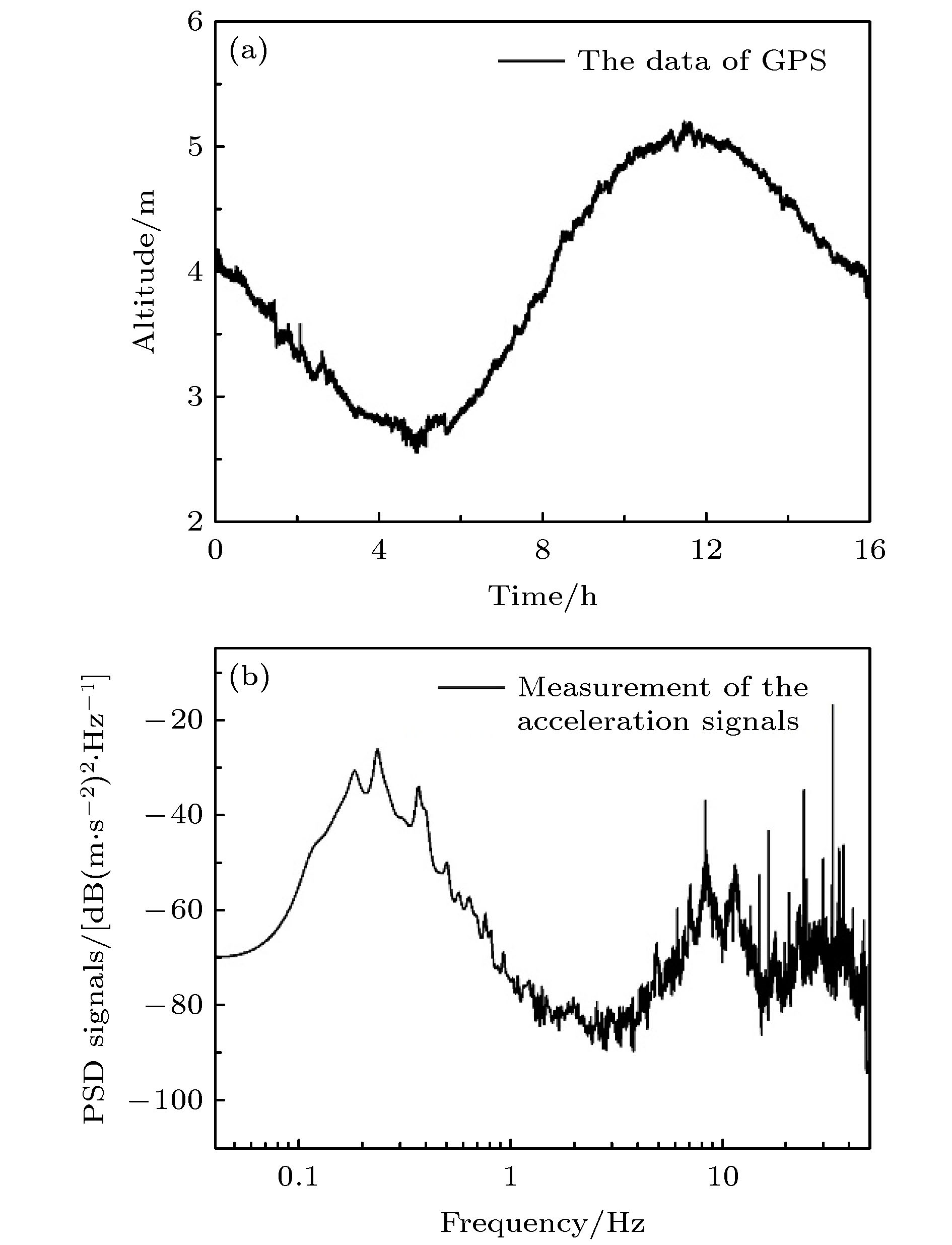
图 4 船载测量环境 (a)船体高度变化; (b)船体加速度噪声功率谱
Fig. 4. The measuremental environment of the ship: (a) The variation of the altitude of the ship; (b) the noise power spectrum density of the acceleration of the ship.

图 5 原子干涉条纹信号(T = 10 ms). 蓝色空心四边形: 原始原子布居数信号; 黑色空心三角形: 振动修正后信号; 红线: 拟合曲线
Fig. 5. The signals of atomic interference fringes (T = 10 ms). Blue dots: The original signals of atomic population; Black dots: The signals after vibration correction; Red line: the fitted curve.

图 6 系泊状态下的连续重力变化数据. 灰点: 原始重力数据; 红线: 移动平均后的数据
Fig. 6. The continuous changes of gravity under mooring state of a ship. Grey dots: The original data of measured gravity; Red line: The data after the dealing of moving average.

图 7 船载系泊状态下的重力测量灵敏度评估
Fig. 7. The sensitivity evaluation of measured gravity data when the ship is moored.
-
[1] Baumann H, Klingele E E, Marson I 2012 Geophys. Prospect. 60 361
Google Scholar
[2] Kasevich M, Chu S 1992 Appl. Phys. B 54 321
Google Scholar
[3] Peters A, Chung K Y, Chu S 2001 Metrologia 38 25
Google Scholar
[4] Freier C, Hauth M, Schkolnik V, Leykauf B, Schilling M, Wziontek H, Scherneck H G, Muller J, Peters A 2016 J. Phys. Conf. Ser. 723 012050
Google Scholar
[5] Wu X J, Zi F, Dudley J, Bilotta R J, Canoza P, Muller H 2017 Optica 4 1545
Google Scholar
[6] Wu B, Wang Z Y, Cheng B, Wang Q Y, Xu A P, Lin Q 2014 Metrologia 51 452
Google Scholar
[7] Zhang X W, Zhong J Q, Tang B, Chen X, Zhu L, Huang P W, Wang J, Zhan M S 2018 Appl. Opt. 57 6545
Google Scholar
[8] Luo Q, Zhang H, Zhang K, Duan X C, Hu Z K, Chen L L, Zhou M K 2019 Rev. Sci. Instrum. 90 043104
Google Scholar
[9] Menoret V, Vermeulen P, Le Moigne N, Bonvalot S, Bouyer P, Landragin A, Desruelle B 2018 Sci. Rep. 8 12300
Google Scholar
[10] Wu B, Zhu D, Cheng B, Wu L M, Wang K N, Wang Z Y, Shu Q, Li R, Wang H L, Wang X L, Lin Q 2019 Opt. Express 27 11252
Google Scholar
[11] Gillot P, Francis O, Landragin A, Dos Santos F P, Merlet S 2014 Metrologia 51 L15
Google Scholar
[12] Huang P W, Tang B, Chen X, Zhong J Q, Xiong Z Y, Zhou L, Wang J, Zhan M S 2019 Metrologia 56 045012
Google Scholar
[13] Fu Z J, Wang Q Y, Wang Z Y, Wu B, Cheng B, Lin Q 2019 Chin. Opt. Lett. 17 011204
Google Scholar
[14] Wang S K, Zhao Y, Zhuang W, Li T C, Wu S Q, Feng J Y, Li C J 2018 Metrologia 55 360
Google Scholar
[15] Hu Z K, Sun B L, Duan X C, Zhou M K, Chen L L, Zhan S, Zhang Q Z, Luo J 2013 Phys. Rev. A 88 043610
Google Scholar
[16] Bidel Y, Zahzam N, Blanchard C, Bonnin A, Cadoret M, Bresson A, Rouxel D, Lequentrec-Lalancette M F 2018 Nat. Commun. 9 9
Google Scholar
[17] Bidel Y, Zahzam N, Bresson A, Blanchard C, Cadoret M, Olesen A V, Forsberg R 2020 J. Geodesy 94 2
Google Scholar
[18] Wu X J, Pagel Z, Malek B S, Nguyen T H, Zi F, Scheirer D S, Muller H 2019 Sci. Adv. 5 eaax0800
Google Scholar
[19] 吴彬, 周寅, 程冰, 朱栋, 王凯楠, 朱欣欣, 陈佩军, 翁堪兴, 杨秋海, 林佳宏, 张凯军, 王河林, 林强 2020 物理学报 69 060302
Google Scholar
Wu B, Zhou Y, Cheng B, Zhu D, Wang K N, Zhu X X, Chen P J, Weng K X, Yang Q H, Lin J H, Zhang K J, Wang H L, Lin Q 2020 Acta Phys. Sin. 69 060302
Google Scholar
[20] Fu Z J, Wu B, Cheng B, Zhou Y, Weng K X, Zhu D, Wang Z Y, Lin Q 2019 Metrologia 56 025001
Google Scholar
[21] Mahadeswaraswamy C 2009 Ph. D. Dissertation (California: Stanford University)
[22] Bidel Y, Carraz O, Charriere R, Cadoret M, Zahzam N, Bresson A 2013 Appl. Phys. Lett. 102 144107
Google Scholar
[23] Geiger R, Ménoret V, Stern G, Zahzam N, Cheinet P, Battelier B, Villing A, Moron F, Lours M, Bidel Y, Bresson A, Landragin A, Bouyer P 2011 Nat. Commun. 2 474
Google Scholar
[24] Barrett B, Antoni-Micollier L, Chichet L, Battelier B, Lévèque T, Landragin A, Bouyer P 2016 Nat. Commun. 7 1
[25] Becker D, Lachmann M D, Seidel S T, Ahlers H, Dinkelaker A N, Grosse J, Hellmig O, Muentinga H, Schkolnik V, Wendrich T, Wenzlawski A, Weps B, Corgier R, Franz T, Gaaloul N, Herr W, Luedtke D, Popp M, Amri S, Duncker H, Erbe M, Kohfeldt A, Kubelka-Lange A, Braxmaier C, Charron E, Ertmer W, Krutzik M, Laemmerzahl C, Peters A, Schleich W P, Sengstock K, Walser R, Wicht A, Windpassinger P, Rasel E M 2018 Nature 562 391
Google Scholar
[26] Elliott E R, Krutzik M C, Williams J R, Thompson R J, Aveline D C 2018 NPJ Microgravity 4 1
Google Scholar
[27] Le Gouet J, Mehlstaubler T E, Kim J, Merlet S, Clairon A, Landragin A, Dos Santos F P 2008 Appl. Phys. B 92 133
Google Scholar
[28] 吴彬, 程冰, 付志杰, 朱栋, 周寅, 翁堪兴, 王肖隆, 林强 2018 物理学报 67 190302
Google Scholar
Wu B, Cheng B, Fu Z J, Zhu D, Zhou Y, Weng K X, Wang X L, Lin Q 2018 Acta Phys. Sin. 67 190302
Google Scholar

 下载:
下载:


计量
- 文章访问数: 11257
- PDF下载量: 281
- 被引次数: 0
