










-
无砟轨道是典型的非连续阻抗粘接结构, 在重载、环境恶化等因素的影响下, 脱粘现象频发, 严重危及列车运行安全. 本文提出一种高精度阵列超声快速成像方法, 建立考虑层间声速差异的非连续阻抗粘接结构声速理论模型, 采用射线追踪方法获取声波在介质中的传播路径和时间. 基于实数编码设计高自由度稀布阵列, 构建稀布阵列合成孔径聚焦技术(synthetic aperture focusing technique, SAFT)成像, 提高检测效率. 在无砟轨道结构上的实验结果表明: 射线追踪方法能够准确计算超声波的传播路径和传播时间, 提高检测精度; 优化设计的稀布阵列方向图主瓣宽度窄, 旁瓣增益低, 可提高检测效率和声场指向性; 脱粘缺陷成像误差在±5%以内时, 稀布阵列SAFT成像方法效率提高了30.9%, 可为该类缺陷检测提供理论支撑.Ballastless track is a typical bonding structure with discontinuous impedance. Under the influence of heavy load, deteriorating environment and other situations, the circumstance of debonding occurs frequently and seriously affects the safety of train operation. In this work, a high-precision array ultrasound fast imaging method is proposed. Based on the propagation path and time of sound wave in the medium obtained by ray tracing method, a theoretical model of sound velocity of discontinuous impedance bonding structure is established when the difference in sound velocity among dielectric layers is taken into account. High degree of freedom sparse array based on real number coding as well as synthetic aperture focusing technology (SAFT) imaging method is used to improve detection efficiency. The results of the experiments carried out on ballast less track structure are shown below. The ray tracing method can accurately calculate the propagation path and propagation time of ultrasonic wave and improve the detection accuracy. The optimized thinned array pattern has narrowed the main lobe width and low side lobe gain, which improves the detection efficiency and sound field directivity. The efficiency of thinned array SAFT imaging method is improved by 30.9% when the imaging error of debonding defects is within ±5%, which provides a theoretical support fordetecting such debonding defects.
-
Keywords:
- ultrasonic imaging /
- thinned array /
- discontinuous impedance /
- debonding
[1] 高建敏, 金忠凯 2022 铁道学报 44 135
 Google Scholar
Google Scholar
Gao J M, Jin Z K 2022 J. China Railway Soc. 44 135
Google Scholar
[2] 赵国堂, 高亮, 赵磊, 钟阳龙 2017 铁道学报 39 1
Google Scholar
Zhao G T Gao L, Zhao L, Zhong Y L 2017 J. China Railway Soc. 39 1
Google Scholar
[3] Liu Y, Qian Z D, Zheng D, Huang Q B 2018 Constr. Build. Mater. 162 229
Google Scholar
[4] Fedorko G, Molnár V, Blaho P, Gaparík J, Zitrick V 2020 Eng. Fail. Anal. 116 104732
Google Scholar
[5] Dvorak R, Topolar L 2021 Materials 14 606
Google Scholar
[6] Jiang W, Xie Y J, Wu J X, Guo J G, Long G C 2021 Eng. Struct. 227 111429
Google Scholar
[7] Hiasa S, Birgul R, Matsumoto M, Catbas F 2018 Measurement 121 144
Google Scholar
[8] Sim J G 2018 Selected Sci. Papers J. Civil Engineering Selected Sci. 13 61
Google Scholar
[9] Xie X Y, Zhai J L, Zhou B 2021 Automat. Constr. 121 103435
Google Scholar
[10] Katerina Z, Tomas C 2019 Geoderma 343 116
Google Scholar
[11] Xargay H, Ripani M, Folino P, Nunez N, Caggiano A 2021 Constr. Build. Mater. 274 121831
Google Scholar
[12] Lin S B, Shams S, Choi H, Azari H 2018 NDT & E Int. 98 101
Google Scholar
[13] 李雅哲, 杨春, 秦开怀 2012 系统仿真学报 24 1762
Google Scholar
Li Y Z, Yang C, Qin K H 2012 J. Syst. Simul. 24 1762
Google Scholar
[14] 唐小平, 白超英, 刘宽厚 2011 地球物理学进展 26 2064
Google Scholar
Tang X P, Bai C Y, Liu K H 2011 Prog. Geophys. 26 2064
Google Scholar
[15] Bai C Y, Huang G J, Zhao R 2010 Geophys. J. Int. 183 1596
Google Scholar
[16] Sutcliffe M, Weston M, Dutton B, Charlton P, Donne K 2012 NDT & E Int. 51 16
Google Scholar
[17] Njiki M, Elouardi A, Bouaziz S, Casula O, Roy O 2018 J. Real-Time Image Pr. 16 505
Google Scholar
[18] 胡宏伟, 杜剑, 李洋, 周正干 2017 机械工程学报 53 128
Google Scholar
Hu H W, Du J, Li Y, Zhou Z G 2017 J. Mech. Eng. 53 128
Google Scholar
[19] 李明飞, 袁梓豪, 刘院省, 邓意成, 王学锋 2021 物理学报 70 084205
Google Scholar
Li M F, Yuan Z H, Liu Y X, Deng Y C, Wang X F 2021 Acta Phys. Sin. 70 084205
Google Scholar
[20] Bray M G, Werner D H, Boeringer D W, Machuga D W 2002 IEEE T. Antenn. Propag. 50 1732
Google Scholar
[21] Peng H, Peng J P, Zhu H N, Wang Z Y, Gao X R 2014 11th IEEE Far East Forum on Nondestructive Evaluation/Testing-New Technology and Application (FENDT), Chengdu, China, Jun 20–23, 2014 p50
[22] 包子阳, 余继周 2020 基于MATLAB的遗传算法及其在稀布阵列天线中的应用 (第2版) (北京: 电子工业出版社) 第64页
Bao Z Y, Yu J Z 2020 Genetic Algorithm Based on MATLAB and its Application in Sparse Array Antenna (2nd Ed.) (Beijing: Publishing House of Electronics Industry) p64 (in Chinese)
-
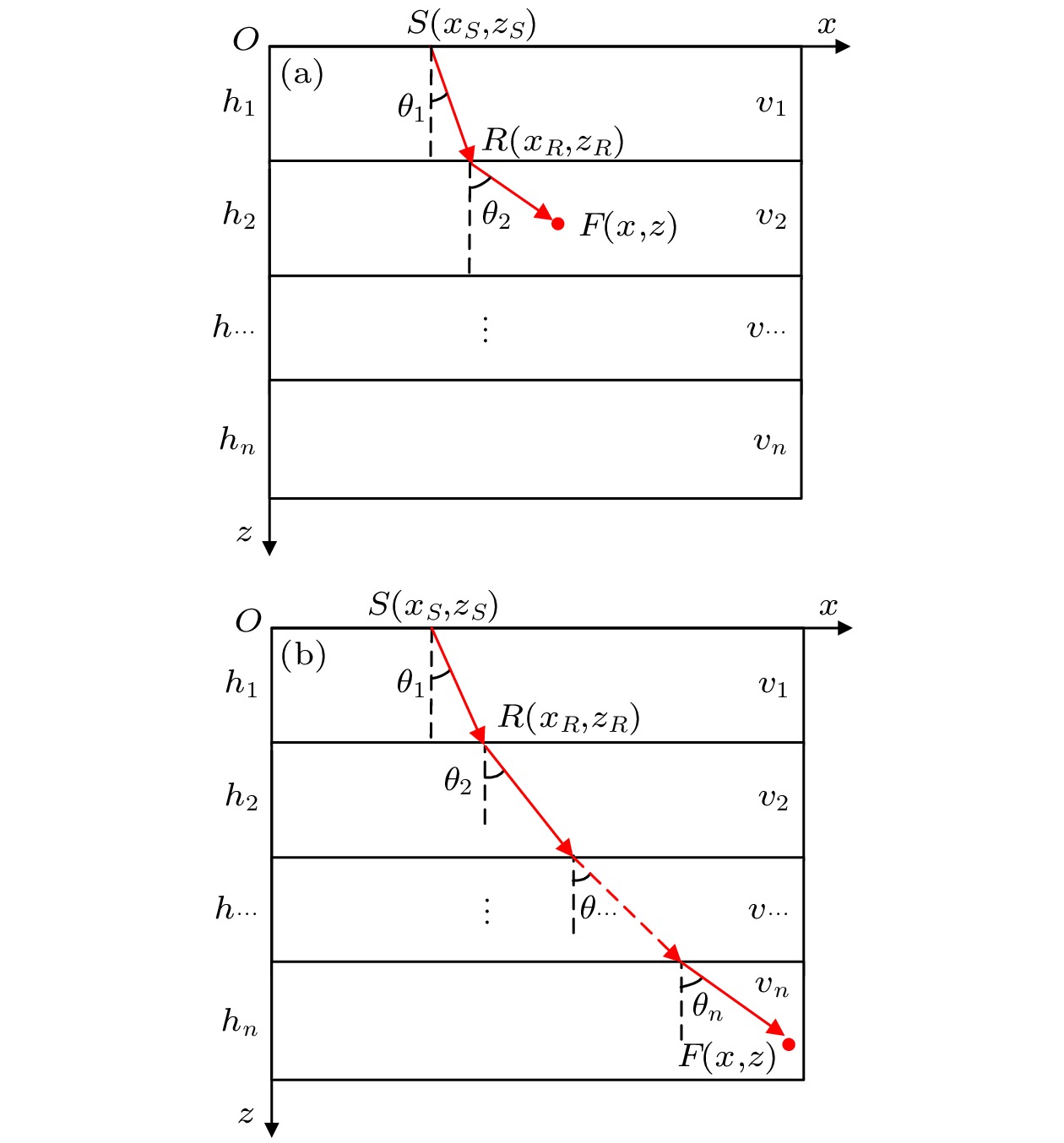
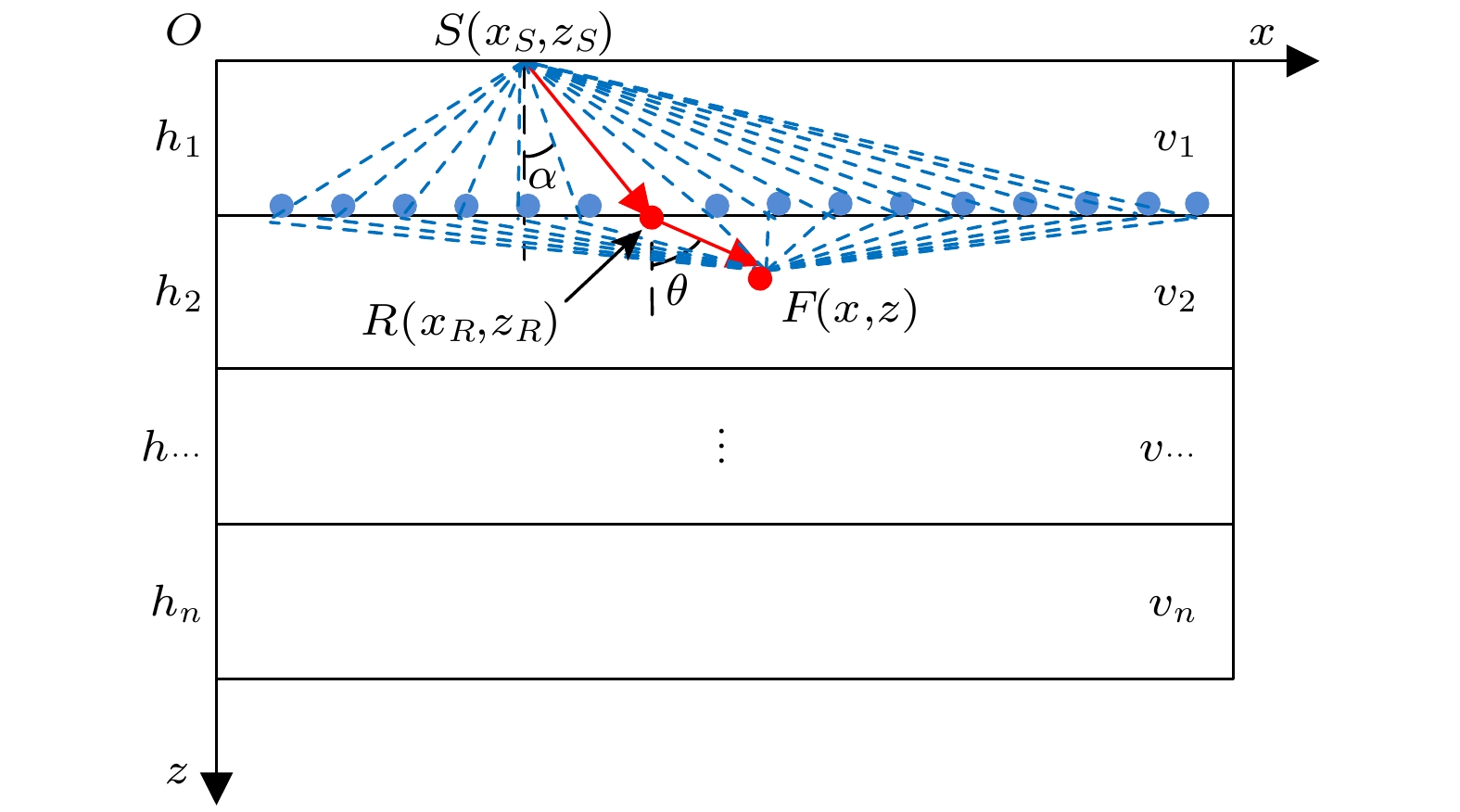
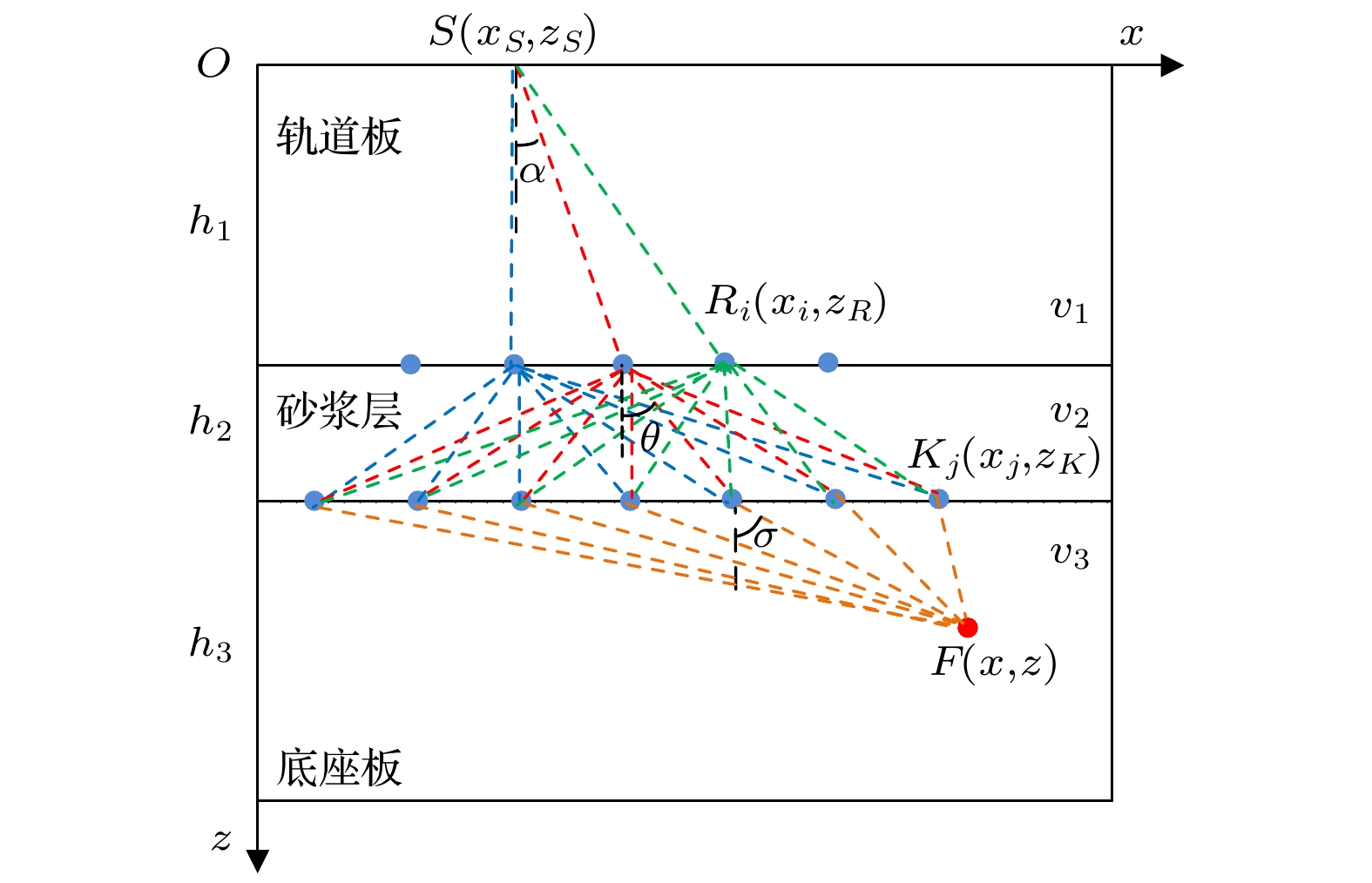
图 3 声波在多层结构中的传播示意图 (a) F在第二层内; (b) F在第n层内
Fig. 3. Schematic diagram of sound wave propagation in multi-layer structure: (a) F is in the second layer; (b) F is in the nth layer.

图 7 11个阵元稀布阵列优化过程 (a)方向图; (b)迭代曲线; (c)阵元相对位置
Fig. 7. Optimization process of 11 elements thinned array: (a) Direction diagram; (b) iterative curve; (c) array element position.
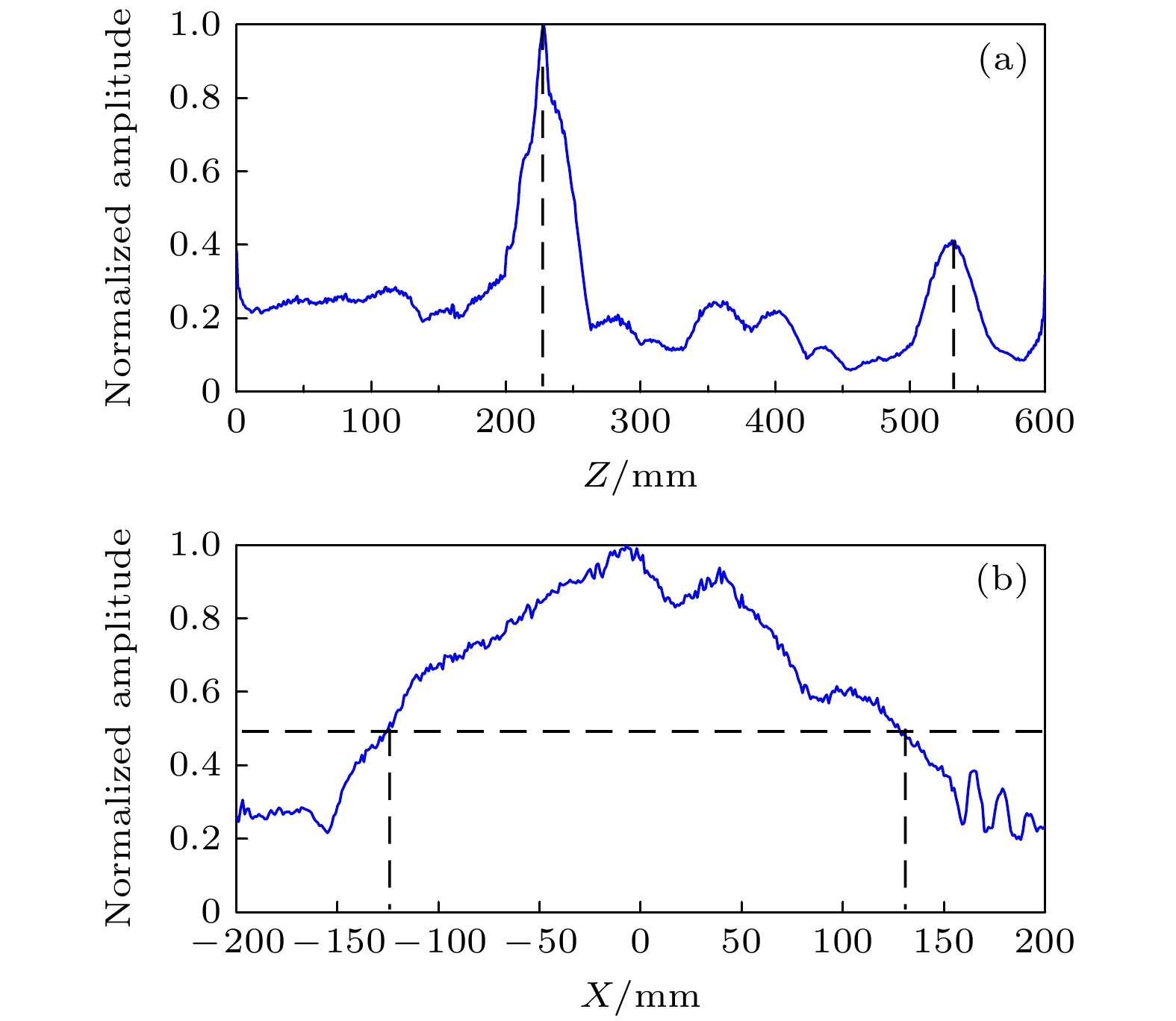
图 9 11个阵元稀布阵列成像结果剖面图 (a)纵向剖面图;(b)横向剖面图
Fig. 9. Cross section of imaging results of thinned array of 11 elements: (a) Longitudinal cross section; (b) transverse cross section.
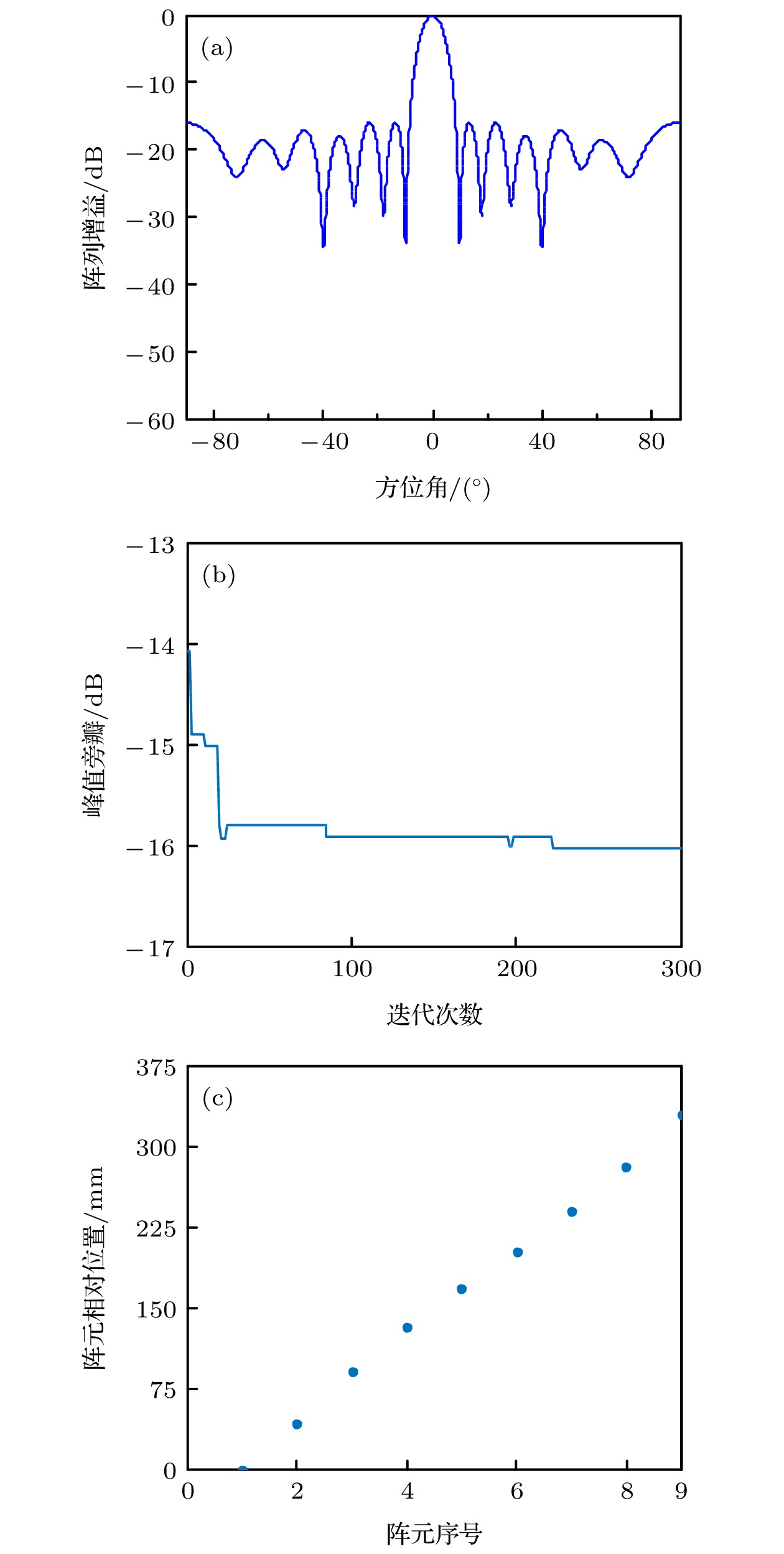
图 10 9个阵元稀布阵列优化过程 (a)方向图; (b)迭代曲线; (c)阵元相对位置
Fig. 10. Optimization process of 9 elements thinned array: (a) Direction diagram; (b) iterative curve; (c) array element position.

图 12 9个阵元稀布阵列成像结果剖面图 (a)纵向剖面图; (b)横向剖面图
Fig. 12. Cross section of imaging results of thinned array of 9 elements: (a) Longitudinal cross section; (b) transverse cross section.
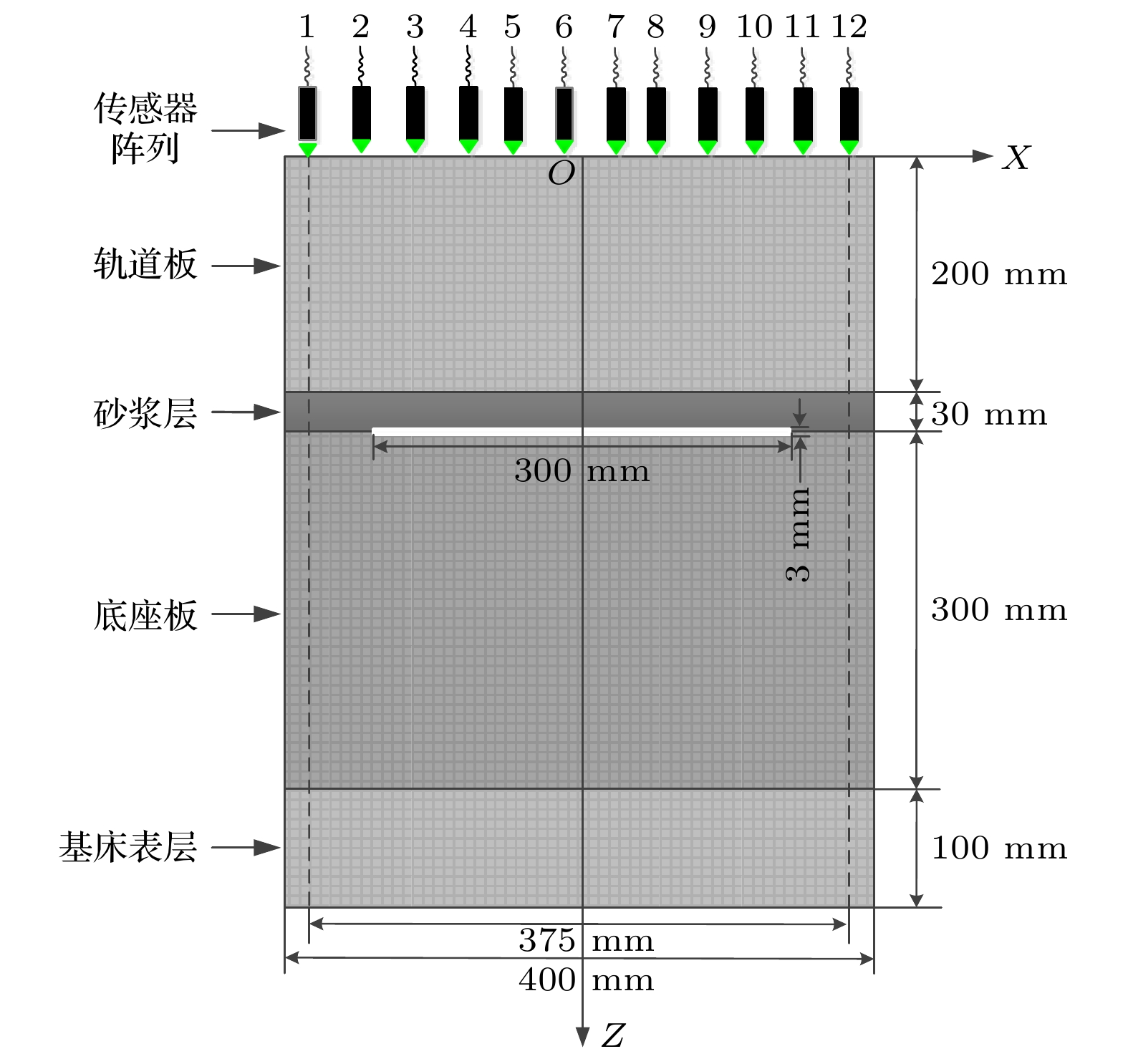
表 1 CRTS II型无砟轨道工程材料参数
Table 1. Engineering material parameters of the ballastless track of CRTS II.
厚度/mm 密度/(kg·m–3) 弹性模量/GPa 泊松比 轨道板 200 2500 36 0.2 砂浆层 30 1800 7 0.3 底座板 300 2500 30 0.2  下载: 导出CSV
下载: 导出CSV
表 2 A1040 MIRA混凝土超声断层扫描仪主要参数
Table 2. Main parameters of A1040 MIRA concrete ultrasonic tomography scanner.
名称 参数 工作频率/kHz 50 采样频率/MHz 1 传输带宽/kHz 25—80 传感器数量 48 声波类型 横波 接触方式 干点接触式
下载: 导出CSV
-
[1] 高建敏, 金忠凯 2022 铁道学报 44 135
Google Scholar
Gao J M, Jin Z K 2022 J. China Railway Soc. 44 135
Google Scholar
[2] 赵国堂, 高亮, 赵磊, 钟阳龙 2017 铁道学报 39 1
Google Scholar
Zhao G T Gao L, Zhao L, Zhong Y L 2017 J. China Railway Soc. 39 1
Google Scholar
[3] Liu Y, Qian Z D, Zheng D, Huang Q B 2018 Constr. Build. Mater. 162 229
Google Scholar
[4] Fedorko G, Molnár V, Blaho P, Gaparík J, Zitrick V 2020 Eng. Fail. Anal. 116 104732
Google Scholar
[5] Dvorak R, Topolar L 2021 Materials 14 606
Google Scholar
[6] Jiang W, Xie Y J, Wu J X, Guo J G, Long G C 2021 Eng. Struct. 227 111429
Google Scholar
[7] Hiasa S, Birgul R, Matsumoto M, Catbas F 2018 Measurement 121 144
Google Scholar
[8] Sim J G 2018 Selected Sci. Papers J. Civil Engineering Selected Sci. 13 61
Google Scholar
[9] Xie X Y, Zhai J L, Zhou B 2021 Automat. Constr. 121 103435
Google Scholar
[10] Katerina Z, Tomas C 2019 Geoderma 343 116
Google Scholar
[11] Xargay H, Ripani M, Folino P, Nunez N, Caggiano A 2021 Constr. Build. Mater. 274 121831
Google Scholar
[12] Lin S B, Shams S, Choi H, Azari H 2018 NDT & E Int. 98 101
Google Scholar
[13] 李雅哲, 杨春, 秦开怀 2012 系统仿真学报 24 1762
Google Scholar
Li Y Z, Yang C, Qin K H 2012 J. Syst. Simul. 24 1762
Google Scholar
[14] 唐小平, 白超英, 刘宽厚 2011 地球物理学进展 26 2064
Google Scholar
Tang X P, Bai C Y, Liu K H 2011 Prog. Geophys. 26 2064
Google Scholar
[15] Bai C Y, Huang G J, Zhao R 2010 Geophys. J. Int. 183 1596
Google Scholar
[16] Sutcliffe M, Weston M, Dutton B, Charlton P, Donne K 2012 NDT & E Int. 51 16
Google Scholar
[17] Njiki M, Elouardi A, Bouaziz S, Casula O, Roy O 2018 J. Real-Time Image Pr. 16 505
Google Scholar
[18] 胡宏伟, 杜剑, 李洋, 周正干 2017 机械工程学报 53 128
Google Scholar
Hu H W, Du J, Li Y, Zhou Z G 2017 J. Mech. Eng. 53 128
Google Scholar
[19] 李明飞, 袁梓豪, 刘院省, 邓意成, 王学锋 2021 物理学报 70 084205
Google Scholar
Li M F, Yuan Z H, Liu Y X, Deng Y C, Wang X F 2021 Acta Phys. Sin. 70 084205
Google Scholar
[20] Bray M G, Werner D H, Boeringer D W, Machuga D W 2002 IEEE T. Antenn. Propag. 50 1732
Google Scholar
[21] Peng H, Peng J P, Zhu H N, Wang Z Y, Gao X R 2014 11th IEEE Far East Forum on Nondestructive Evaluation/Testing-New Technology and Application (FENDT), Chengdu, China, Jun 20–23, 2014 p50
[22] 包子阳, 余继周 2020 基于MATLAB的遗传算法及其在稀布阵列天线中的应用 (第2版) (北京: 电子工业出版社) 第64页
Bao Z Y, Yu J Z 2020 Genetic Algorithm Based on MATLAB and its Application in Sparse Array Antenna (2nd Ed.) (Beijing: Publishing House of Electronics Industry) p64 (in Chinese)

 下载:
下载:

计量
- 文章访问数: 5655
- PDF下载量: 64
- 被引次数: 0
