










-
本文发展了一种利用逆统计问题中的回归不确定性来自动探索物质相的新方法. 以自驱动活性粒子的群集相变为例, 展示了对于这一类涉及非平衡、非晶格、一阶相变等复杂要素的多体系统, 在训练人工神经网络处理其中的逆统计问题回归任务, 成功重构出系统的噪声强度这一参数之后, 回归结果的不确定性关于实际噪声强度的分布具有非平庸的规律性, 可用于揭示该系统中的群集相变, 并自动提取相变的临界噪声强度. 本文还与两种基于神经网络分类能力的常见方法进行直接对比, 讨论了它们的异同和各自特点. 结果表明, 本文发展的新方法不仅具有使用效率较高和所需预设的物理知识较少等实用优势, 而且更有在理论层面较为自然地与传统物理概念建立联系的可能性, 对于跨领域的不同物理系统都有良好的通用性和有效性.We develop the neural network based “learning from regression uncertainty” approach for the automatic detection of phases of matter in nonequilibrium active systems. Taking the flocking phase transition of self-propelled active particles described by the Vicsek model for example, we find that after training a neural network for solving the inverse statistical problem, i.e. for performing the regression task of reconstructing the noise level from given samples of such a nonequilibrium many-body complex system’s steady state configurations, the uncertainty of regression results obtained by the well-trained network can actually be utilized to reveal possible phase transitions in the system under study. The noise level dependence of regression uncertainty is assumed to be in a non-trivial M-shape, and its valley appears at the critical point of the flocking phase transition. By directly comparing this regression-based approach with the widely-used classification-based “learning by confusion” and “learning with blanking” approaches, we show that our approach has practical effectiveness, efficiency, good generality for various physical systems across interdisciplinary fields, and a greater possibility of being interpretable via conventional notions of physics. These approaches can complement each other to serve as a promising generic toolbox for investigating rich critical phenomena and providing data-driven evidence on the existence of various phase transitions, especially for those complex scenarios associated with first-order phase transitions or nonequilibrium active systems where traditional research methods in physics could face difficulties.
-
Keywords:
- machine learning /
- phase transition /
- nonequilibrium many-body system /
- inverse statistical problem
[1] Melko R G, Carrasquilla J 2017 Nat. Phys. 13 431
 Google Scholar
Google Scholar
[2] van Nieuwenburg E P L, Liu Y H, Huber S D 2017 Nat. Phys. 13 435
Google Scholar
[3] Guo W C, Ai B Q, He L 2021 EPL 136 48002
Google Scholar
[4] Venderley J, Khemani V, Kim E A 2018 Phys. Rev. Lett. 120 257204
Google Scholar
[5] Beach M J S, Golubeva A, Melko R G 2018 Phys. Rev. B 97 045207
Google Scholar
[6] Lee S S, Kim B J 2019 Phys. Rev. E 99 043308
Google Scholar
[7] Ch’ng K, Carrasquilla J, Melko R G, Khatami E 2017 Phys. Rev. X 7 031038
[8] Broecker P, Carrasquilla J, Melko R G, Trebst S 2017 Sci. Rep. 7 1
Google Scholar
[9] Carrasquilla J, 2020 Adv. Phys. X 5 1797528
[10] Yu L W, Zhang S Y, Shen P X, Deng D L 2023 Fundamental Research (In Press
[11] Rem B S, Käming N, Tarnowski M, Asteria L, Fläschner N, Becker C, Sengstock K, Weitenberg C 2019 Nat. Phys. 15 917
Google Scholar
[12] Gökmen D E, Ringel Z, Huber S D, Koch-Janusz M 2021 Phys. Rev. Lett. 127 240603
Google Scholar
[13] Gökmen D E, Ringel Z, Huber S D, Koch-Janusz M 2021 Phys. Rev. E 104 064106
[14] Miles C, Bohrdt A, Wu R, Chiu C, Xu M, Ji G, Greiner M, Weinberger K Q, Demler E, Kim E A 2021 Nat. Commun. 12 3905
Google Scholar
[15] Nguyen H C, Zecchina R, Berg J 2017 Adv. Phys. 66 197
Google Scholar
[16] Udrescu S M, Tegmark M 2021 Phys. Rev. E 103 043307
[17] Liu Z, Tegmark M 2022 Phys. Rev. Lett. 128 180201
Google Scholar
[18] Liu Z, Tegmark M 2021 Phys. Rev. Lett. 126 180604
Google Scholar
[19] Udrescu S M, Tegmark M 2020 Sci. Adv. 6 eaay2631
Google Scholar
[20] Guo W C, He L 2023 New J. Phys. 25 083037
[21] Binder K 1987 Rep. Prog. Phys. 50 783
Google Scholar
[22] Falkovich G, Gawȩdzki K, Vergassola M 2001 Rev. Mod. Phys. 73 913
Google Scholar
[23] Jarzynski C 2015 Nat. Phys. 11 105
Google Scholar
[24] Vicsek T, Czirók A, Ben-Jacob E, Cohen I, Shochet O 1995 Phys. Rev. Lett. 75 1226
Google Scholar
[25] Toner J, Tu Y, Ramaswamy S 2005 Ann. Phys. 318 170
Google Scholar
[26] Grégoire G, Chaté H 2004 Phys. Rev. Lett. 92 025702
Google Scholar
[27] Chaté H, Ginelli F, Grégoire G, Raynaud F 2008 Phys. Rev. E 77 046113
Google Scholar
[28] He K, Zhang X, Ren S, Sun J 2016 Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR) Las Vegas, USA, June 27–30, 2016 p770
[29] Nguyen H C, Berg J 2012 Phys. Rev. Lett. 109 050602
Google Scholar
[30] Jo J, Hoang D T, Periwal V 2020 Phys. Rev. E 101 032107
-

图 1 数值模拟生成的对应于不同噪声强度
$ \eta $ 的典型样本. 样本中的每个圆形标记表示二维空间中的一个自驱动粒子, 其空间分布表示自驱动粒子的瞬时空间分布, 其颜色分布表示自驱动粒子的运动方向的瞬时角度分布. 此处作为示例的样本中, 左边的5个样本处于群集相, 最右边的样本处于无序相Fig. 1. Typical samples corresponding to different noise levels that are generated by numerical simulations. In every sample, each of the circular markers represents a single self-propelled particle in the two-dimensional space, with their spatial distribution representing the instantaneous spatial distribution of self-propelled particles, and their color distribution representing the instantaneous angular distribution of directions of motion of these self-propelled particles. Among the samples shown here for instance, the five samples in the left are in the flocking phase, and the rightmost one is in the disordered phase.

图 2 自驱动活性粒子系统中的ISP (a) 系统的群速度
$ \bar v $ 关于噪声强度$ \eta $ 的依赖关系,$ \bar v $ 在$ {\eta _{\text{c}}} = {0}{.626} \pm {0}{.006} $ 的突变表明系统在该噪声强度处发生一阶相变; (b)训练完成的ANN给出的重构噪声强度$ {\eta _{\text{R}}} $ 关于实际噪声强度$ \eta $ 的依赖关系, 误差棒表示回归不确定性$ U(\eta ) $ , 对角线表示理想的回归结果$ {\eta _{\text{R}}}{=}\eta $ Fig. 2. Inverse statistical problem in a self-propelled active particle system: (a) Noise level dependence of the system’s global group velocity, whose jump at
$ {\eta _{\text{c}}} = {0}{.626} \pm {0}{.006} $ characterizes the first-order flocking phase transition; (b) noise level dependence of the reconstructed noise level predicted by the well-trained ANN. The error bars represent the regression uncertainty$ U(\eta ) $ , and the diagonal line represent the ideal regression result$ {\eta _{\text{R}}}{=}\eta $ .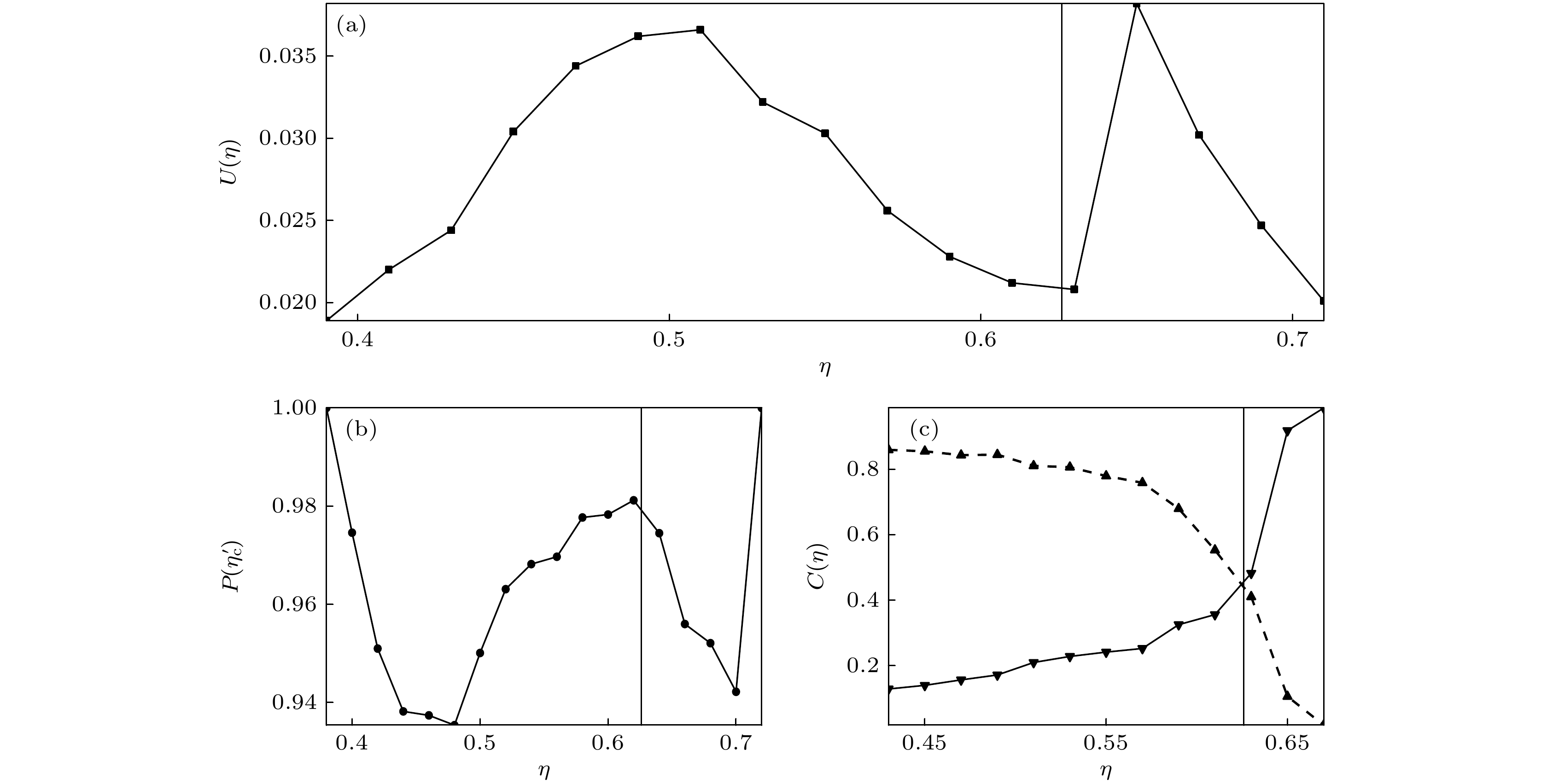
图 3 三种机器学习方法揭示自驱动活性粒子的群集相变 (a) 基于回归不确定性的LFRU方法; (b) “混淆法”; (c) “留白法”
Fig. 3. Revealing the flocking phase transition of self-propelled active particles via applying three different machine learning approaches: (a) The LFRU approach; (b) the “learning by confusion” approach; (c) the “learning with blanking” approach.
-
[1] Melko R G, Carrasquilla J 2017 Nat. Phys. 13 431
Google Scholar
[2] van Nieuwenburg E P L, Liu Y H, Huber S D 2017 Nat. Phys. 13 435
Google Scholar
[3] Guo W C, Ai B Q, He L 2021 EPL 136 48002
Google Scholar
[4] Venderley J, Khemani V, Kim E A 2018 Phys. Rev. Lett. 120 257204
Google Scholar
[5] Beach M J S, Golubeva A, Melko R G 2018 Phys. Rev. B 97 045207
Google Scholar
[6] Lee S S, Kim B J 2019 Phys. Rev. E 99 043308
Google Scholar
[7] Ch’ng K, Carrasquilla J, Melko R G, Khatami E 2017 Phys. Rev. X 7 031038
[8] Broecker P, Carrasquilla J, Melko R G, Trebst S 2017 Sci. Rep. 7 1
Google Scholar
[9] Carrasquilla J, 2020 Adv. Phys. X 5 1797528
[10] Yu L W, Zhang S Y, Shen P X, Deng D L 2023 Fundamental Research (In Press
[11] Rem B S, Käming N, Tarnowski M, Asteria L, Fläschner N, Becker C, Sengstock K, Weitenberg C 2019 Nat. Phys. 15 917
Google Scholar
[12] Gökmen D E, Ringel Z, Huber S D, Koch-Janusz M 2021 Phys. Rev. Lett. 127 240603
Google Scholar
[13] Gökmen D E, Ringel Z, Huber S D, Koch-Janusz M 2021 Phys. Rev. E 104 064106
[14] Miles C, Bohrdt A, Wu R, Chiu C, Xu M, Ji G, Greiner M, Weinberger K Q, Demler E, Kim E A 2021 Nat. Commun. 12 3905
Google Scholar
[15] Nguyen H C, Zecchina R, Berg J 2017 Adv. Phys. 66 197
Google Scholar
[16] Udrescu S M, Tegmark M 2021 Phys. Rev. E 103 043307
[17] Liu Z, Tegmark M 2022 Phys. Rev. Lett. 128 180201
Google Scholar
[18] Liu Z, Tegmark M 2021 Phys. Rev. Lett. 126 180604
Google Scholar
[19] Udrescu S M, Tegmark M 2020 Sci. Adv. 6 eaay2631
Google Scholar
[20] Guo W C, He L 2023 New J. Phys. 25 083037
[21] Binder K 1987 Rep. Prog. Phys. 50 783
Google Scholar
[22] Falkovich G, Gawȩdzki K, Vergassola M 2001 Rev. Mod. Phys. 73 913
Google Scholar
[23] Jarzynski C 2015 Nat. Phys. 11 105
Google Scholar
[24] Vicsek T, Czirók A, Ben-Jacob E, Cohen I, Shochet O 1995 Phys. Rev. Lett. 75 1226
Google Scholar
[25] Toner J, Tu Y, Ramaswamy S 2005 Ann. Phys. 318 170
Google Scholar
[26] Grégoire G, Chaté H 2004 Phys. Rev. Lett. 92 025702
Google Scholar
[27] Chaté H, Ginelli F, Grégoire G, Raynaud F 2008 Phys. Rev. E 77 046113
Google Scholar
[28] He K, Zhang X, Ren S, Sun J 2016 Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR) Las Vegas, USA, June 27–30, 2016 p770
[29] Nguyen H C, Berg J 2012 Phys. Rev. Lett. 109 050602
Google Scholar
[30] Jo J, Hoang D T, Periwal V 2020 Phys. Rev. E 101 032107


 下载:
下载:











计量
- 文章访问数: 5144
- PDF下载量: 91
- 被引次数: 0
