










-
利用棘轮结构可以对随机运动的颗粒进行整流使其产生定向的输运. 不同尺寸的颗粒对棘轮整流的响应不同, 因此可以利用棘轮实现颗粒分离. 基于前期气相等离子体中颗粒整流与分离实验, 本文通过构建三维模型对双分散颗粒分离的物理机理进行研究. 首先通过等离子体流体模拟及双正弦函数插值的方法, 得到实验难以测得的不对称棘轮通道内等离子体参量分布, 并对微米级尘埃颗粒在棘轮鞘层中的受力进行分析, 进一步利用 Langevin 方程对尘埃等离子体棘轮中双分散颗粒定向输运过程进行数值模拟, 重现了颗粒分离实验现象. 结果分析表明, 双分散的尘埃颗粒悬浮在鞘层中不同的高度, 并受到相反取向的不对称势的作用, 造成其向相反方向的输运.A ratchet can be employed to rectify randomly moving particles, generating directional transport. Taking advantage of the distinct responses of particles with different sizes to the system, bi-dispersed particles can be effectively separated. Based on previous experiments demonstrating the rectification and separation of dust particles in gas-phase plasma, a three-dimensional model is constructed to reveal the physical mechanism behind the separation of bi-dispersed dust particles here. Utilizing plasma fluid simulation and double sine function interpolation, the distribution of plasma parameters in the asymmetric ratchet channel is obtained, which is challenging to measure experimentally. Subsequently, a numerical simulation of the directional transport process of bi-dispersed dust particles in a dusty plasma ratchet is conducted by solving the Langevin equation. The results analyze the forces acting on micro-sized dust particles in the sheath and reproduce the experimental phenomenon of particle separation. The numerical simulation reveals that the bi-dispersed dust particles, suspended at different heights within the sheath, experience asymmetric potentials with opposite orientations, leading to their distinct transport and subsequent separation.
-
Keywords:
- dusty plasma /
- ratchet /
- particle separation
[1] Hänggi P, Marchesoni F 2009 Rev. Mod. Phys. 81 387
 Google Scholar
Google Scholar
[2] Feynman R P, Leighton R B, Sands M 1963 The Feynman Lectures on Physics (Vol. 1) (America: Addison-Wesley Publishing Company) p46
[3] 郭瑞雪, 艾保全 2023 物理学报 72 200501
Google Scholar
Guo R X, Ai B Q 2023 Acta Phys. Sin. 72 200501
Google Scholar
[4] Roeling E M, Germs W C, Smalbrugge B, Geluk E J, de Vries T, Janssen R A J, Kemerink M 2011 Nat. Mater. 10 51
Google Scholar
[5] Park S, Song J, Kim J S 2019 Sci. Adv. 5 eaav3
Google Scholar
[6] Wilson M R, Solà J, Carlone A, Goldup S M, Lebrasseur N, Leigh D A 2016 Nature 534 235
Google Scholar
[7] Reguera D, Luque A, Burada P S, Schmid G, Rubí J M, Hänggi P 2012 Phys. Rev. Lett. 108 020604
Google Scholar
[8] Skaug M J, Schwemmer C, Fringes S, Rawlings C D, Knoll A W 2018 Science 359 1505
Google Scholar
[9] Dalili A, Samiei E, Hoorfar M 2019 Analyst 144 87
Google Scholar
[10] Hettiarachchi S, Cha H T, Ouyang L X, Mudugamuwa A, An H J, Kijanka G, Kashaninejad N, Nguyen N T, Zhang J 2023 Lab Chip 23 982
Google Scholar
[11] Morfill G E, Ivlev A V 2009 Rev. Mod. Phys. 81 1353
Google Scholar
[12] Du C R, Nosenko V, Thomas H M, Lin Y F, Morfill G E, Ivlev A V 2019 Phys. Rev. Lett. 123 185002
Google Scholar
[13] 洪学仁, 段文山, 孙建安, 石玉仁, 吕克璞 2003 物理学报 52 2671
Google Scholar
Hong X R, Duan W S, Sun J A, Shi Y R, Lü K P 2003 Acta Phys. Sin. 52 2671
Google Scholar
[14] Wang Y M, Guan M, Yu M Y 2020 Contrib. Plasma Phys. 60 9
Google Scholar
[15] Hong Y H, Yuang C X, Jia J S, Gao R L, Wang Y, Zhou Z X, Wang X O, Li H, Wu J 2017 Plasma Sci. Technol. 19 055301
Google Scholar
[16] He Y F, Ai B Q, Dai C X, Song C, Wang R Q, Sun W T, Liu F C, Feng Y 2020 Phys. Rev. Lett. 124 075001
Google Scholar
[17] Cai Z M, Ma Z B, Zhao Y K, Liu F C, He Y F 2023 Appl. Phys. Lett. 123 194102
Google Scholar
[18] Wang S, Zhang N, Zhang S X, Tian M, Cai Y W, Fan W L, Liu F C, He Y F 2022 Chin. Phys. B 31 065202
Google Scholar
[19] Brok W J M, van Dijk J, Bowden M D, Mullen J J A M, Kroesen G M W 2003 J. Phys. D: Appl. Phys. 36 1967
Google Scholar
[20] 段蒙悦, 贾文柱, 张莹莹, 张逸凡, 宋远红 2023 物理学报 72 165202
Google Scholar
Duan M Y, Jia W Z, Zhang Y Y, Zhang Y F, Song Y H 2023 Acta Phys. Sin. 72 165202
Google Scholar
[21] Melzer A 2019 Physics of Dusty Plasma: An Introduction (Switzerland: Springer Nature Switzerland AG) p8
[22] Barnes M S, Keller J H, Forster J C, O’Neill J A, Coultas D K 1992 Phys. Rev. Lett. 68 313
Google Scholar
[23] Fortov V E, Ivlev A V, Khrapak S A, Khrapak A G, Morfill G E 2005 Phys. Rep. 421 1
Google Scholar
[24] Wang K, Huang D, Feng Y 2019 Phys. Rev. E 99 063206
Google Scholar
[25] Zhang R Y, Liu Y H, Huang F, Chen Z Y, Li C Y 2017 Chin. Phys. Lett. 34 075203
Google Scholar
-
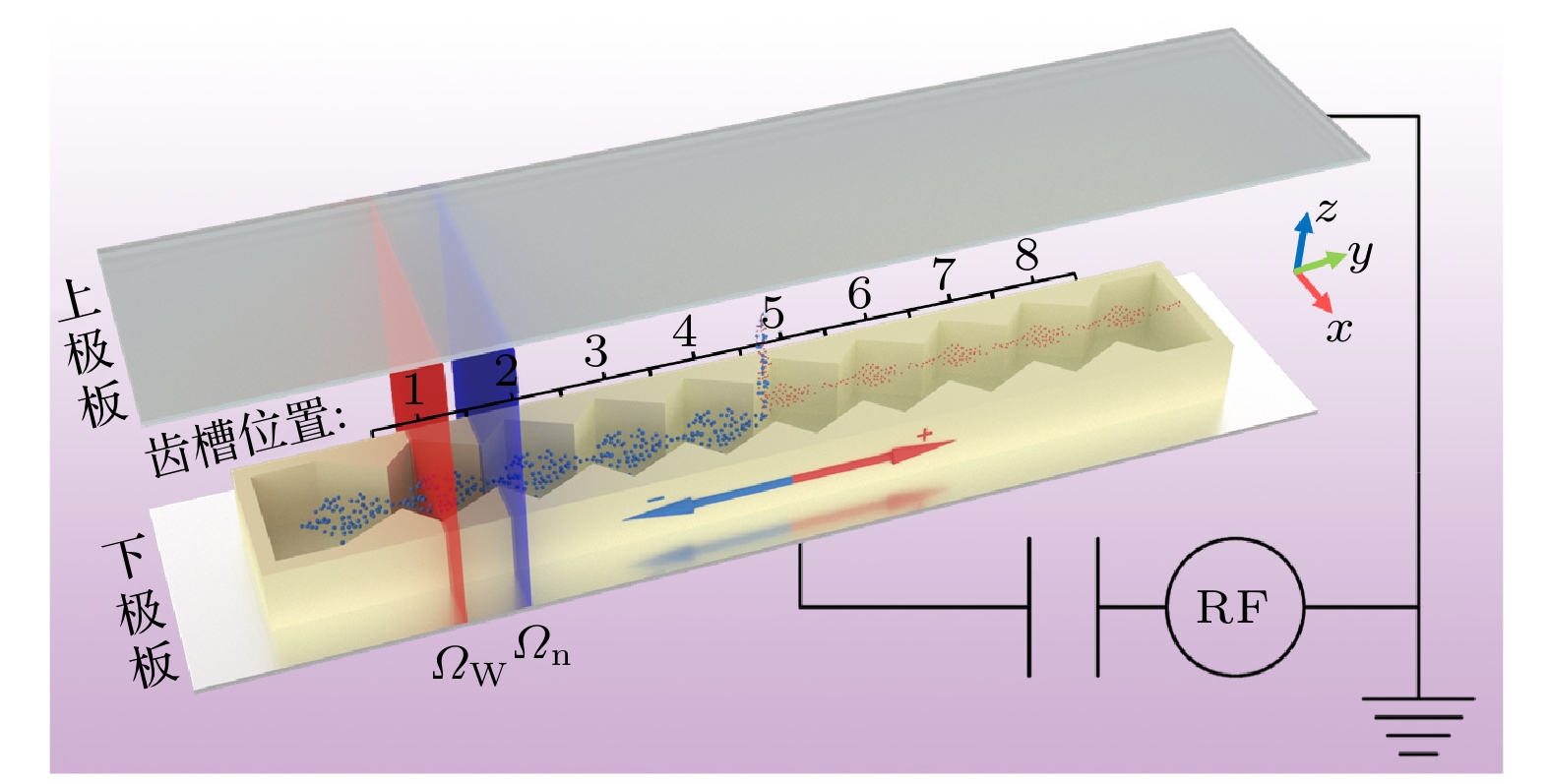
图 1 尘埃等离子体直棘轮示意图. 介质棘轮由 8 个不对称的棘齿单元构成. 在棘齿通道中部的 4 号齿投入双分散颗粒混合物, 在特定条件下, 大颗粒(蓝色)和小颗粒(红色)分别向相反方向沿棘齿通道输运并进入颗粒收集池, 实现颗粒分离
Fig. 1. Schematic diagram of straight dusty plasma ratchet. The dielectric ratchet is composed of 8 asymmetric ratchet units. While bi-dispersed particles are injected to the No. 4 ratchet unit, the small dust particles (red balls) and the large dust particles (blue balls) flow in opposite direction along the saw channel. Till the small particles and the large particles enter the two collection pools respectively, particle separation is achieved.
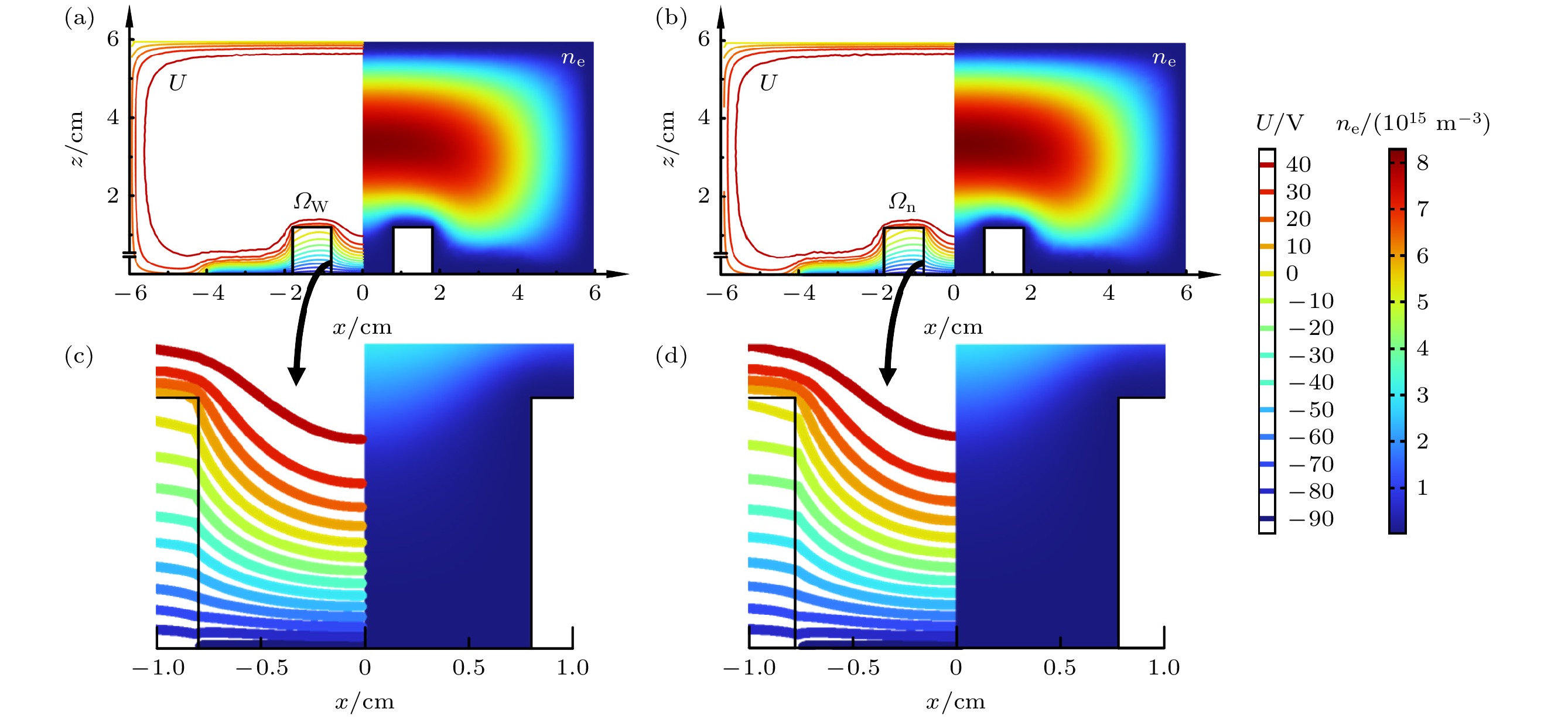
图 2 两个特征竖截面内电势和电子密度的分布 (a)和(b)分别为$ \varOmega_{\rm{w}} $和$ \varOmega_{\rm{n}} $中电势U (左半部)和电子密度$ {n_{\mathrm{e}}} $(右半部)的分布情况; (c)和(d)分别为(a)和(b)中棘齿通道部分的局部放大图
Fig. 2. Distribution of equipotential line U and electron density $ {n_{\mathrm{e}}} $ in the two typical cross sections: (a) and (b) show the distribution of U (left halves) and $ {n_{\mathrm{e}}} $ (right halves) in $ \varOmega_{\rm{w}} $ and $ \varOmega_{\rm{n}} $; (c) and (d) are enlarged views of panels (a) and (b), respectively.

图 3 三个棘齿单元中 U = 47 V 等势面的三维分布
Fig. 3. Three-dimensional distribution of the equipotential surface U = 47 V within three sawteeth
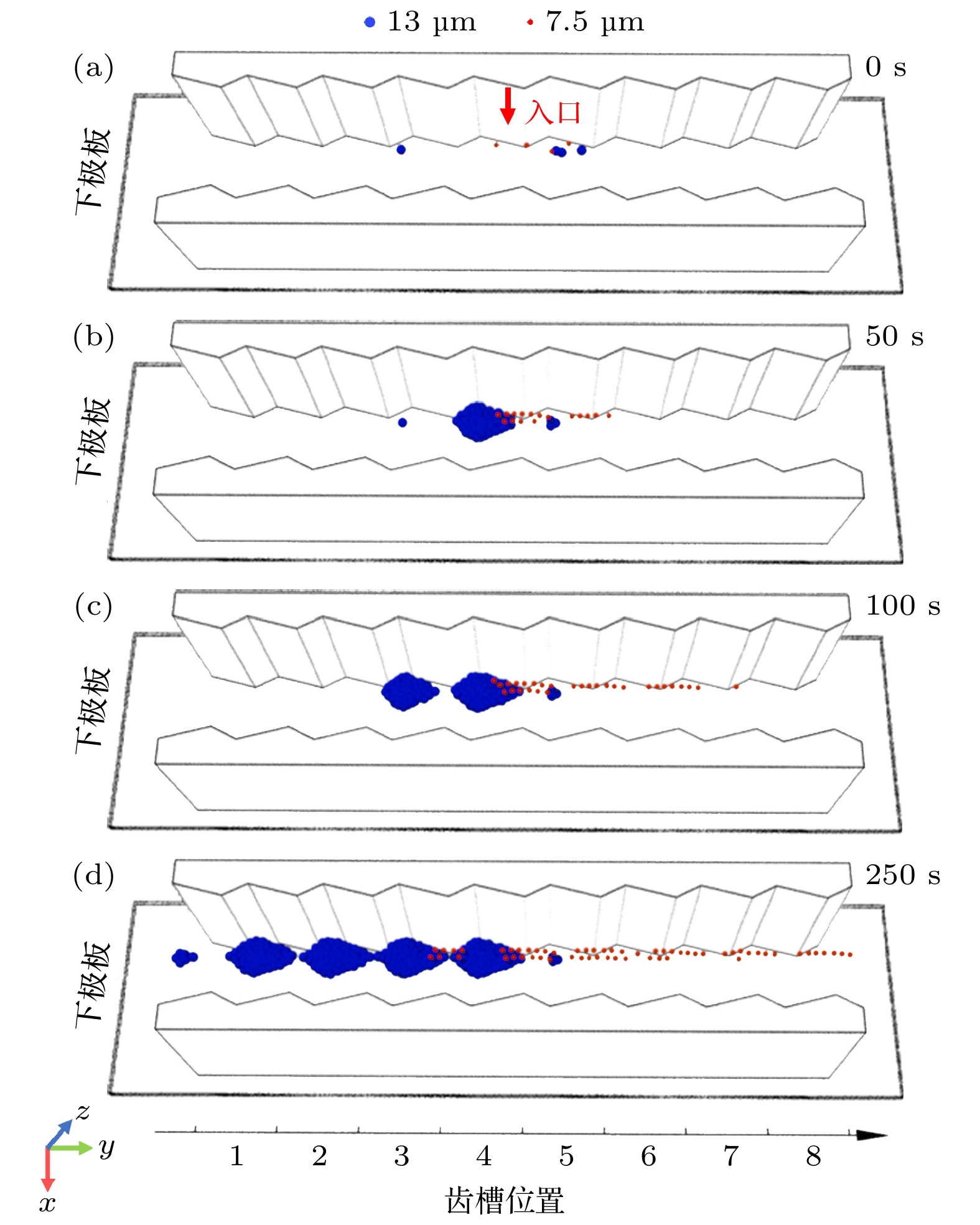
图 4 颗粒分离模拟结果. 小颗粒(红球)和大颗粒(蓝球)由通道中心4号齿槽不断地缓慢投入 (a)初始时刻, 少量双分散颗粒被棘轮势约束在棘齿中, 不能形成定向输运; (b)—(d)随着持续不断地加入双分散颗粒, 小颗粒沿棘齿通道开始向右输运, 大颗粒开始向左输运, 实现颗粒分离
Fig. 4. Particle separation in numerical simulation. Small dust particles (red balls) and large dust particles (blue balls) are put into No. 4 ratchet unit smoothly: (a) A small amount of mixture of bi-dispersed dust particles are injected into saw channel at initial stage. At present the directional transport has not been achieved. (b)–(d) With continual injection of particles, the small particles start to transport toward the right, while the large particles begin to transport toward the left. This phenomenon stands for stable particle separation.
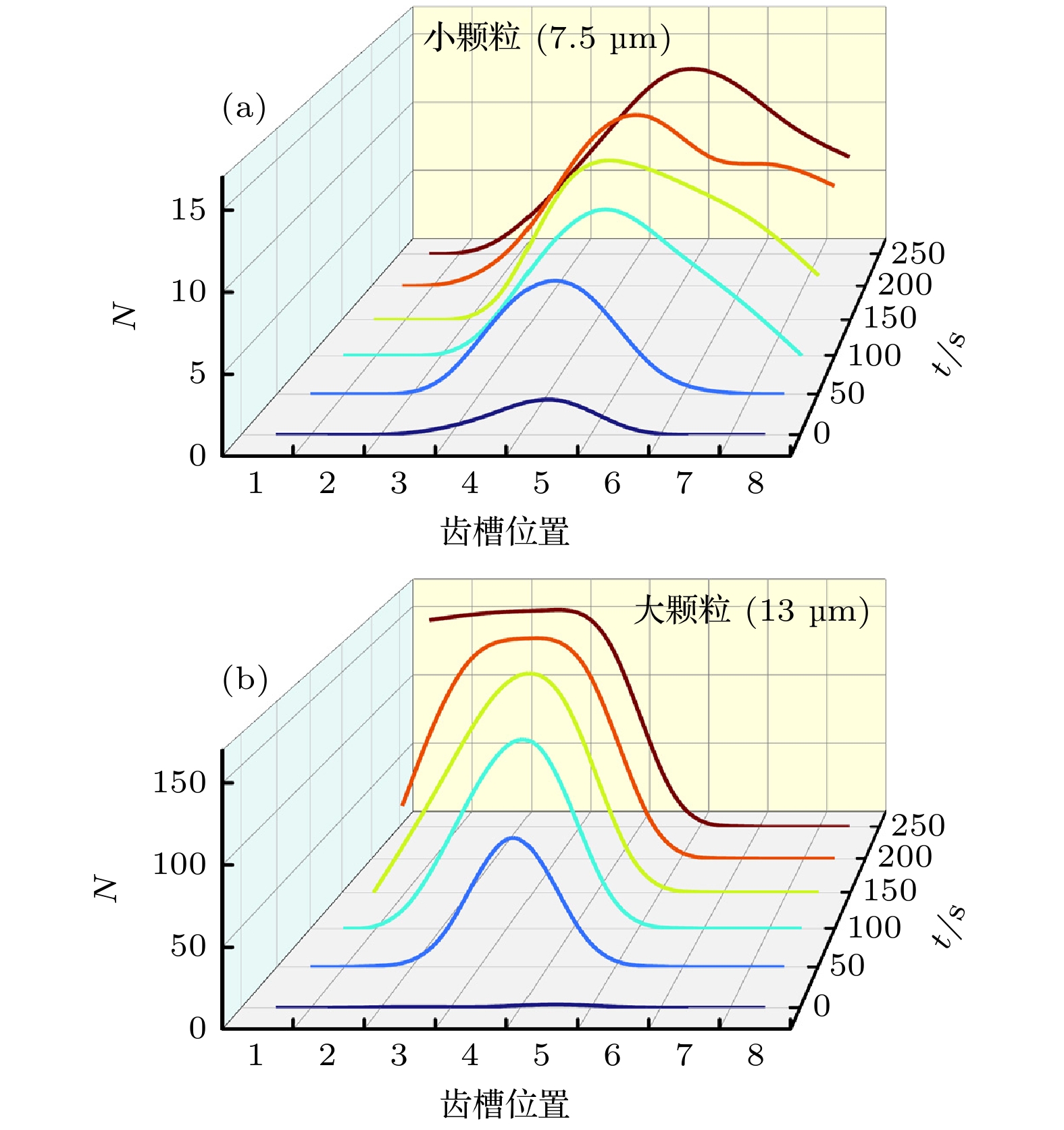
图 5 齿槽内颗粒数量分布随时间的演化 (a)小颗粒; (b)大颗粒. 在初始时刻, 小颗粒和大颗粒分布在投入位置4号齿内. 随着持续的加入双分散颗粒, 小颗粒沿棘齿通道逐渐向右输运, 大颗粒逐渐向左输运. 以设定的颗粒投入速率, 约 250 s后颗粒分布达到稳态, 形成持续的颗粒分离过程
Fig. 5. Particle number distribution of (a) small dust particles and (b) large dust particles. The small dust particles and the large dust particles are concentrated in the No. 4 ratchet unit at the initial moment. However, the small dust particles gradually transport toward the right, while the large dust particles toward the left. The steady state of particle separation is formed after about 250 s with the certain injected rate.
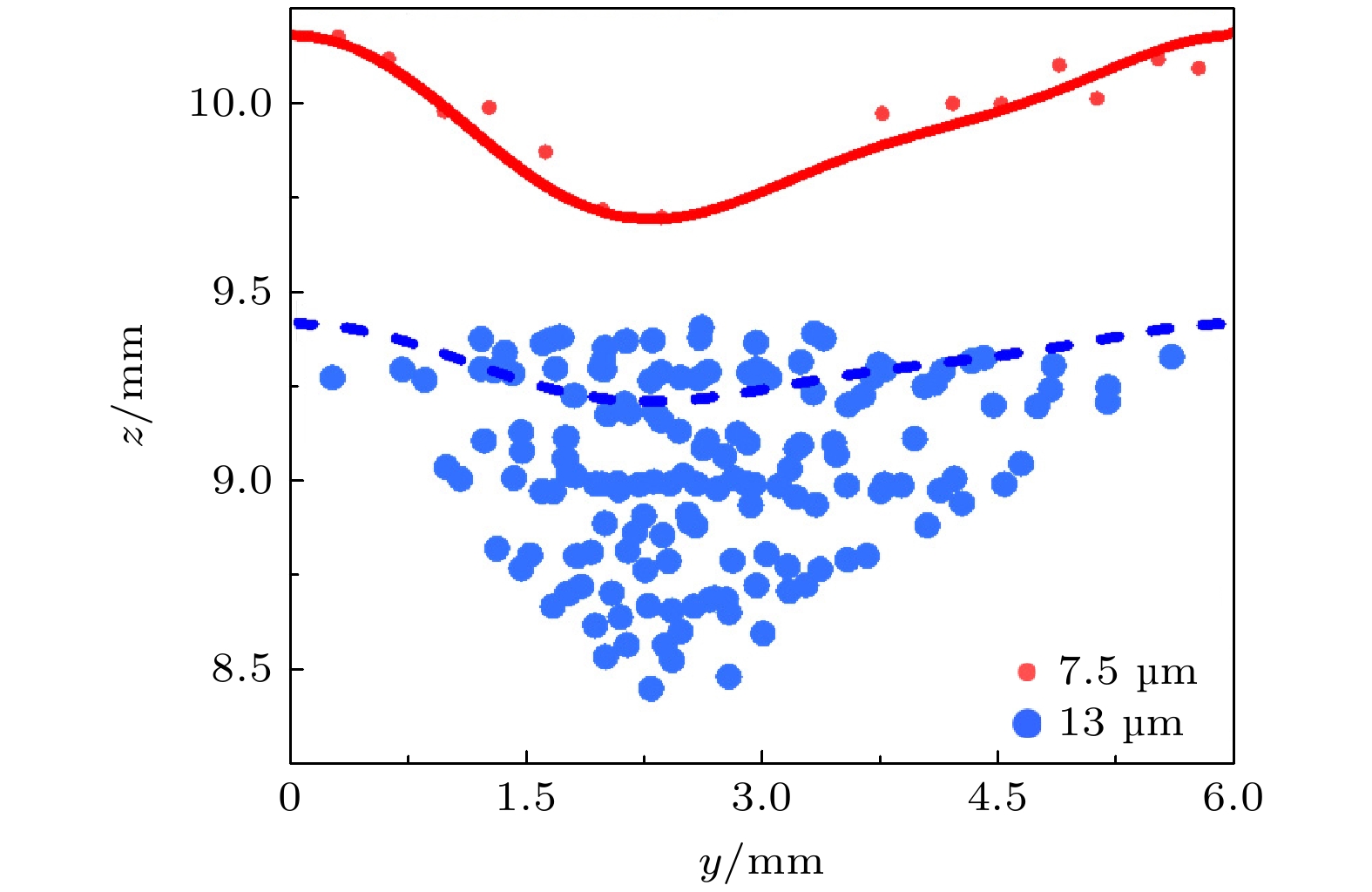
图 6 单个齿槽内双分散颗粒的竖直空间分布. 小颗粒(红球)分布在距离下极板较高位置约10 mm处, 大颗粒(蓝球)分布在较低位置约9 mm处. 红色实线和蓝色虚线分别表示小颗粒和大颗粒沿棘齿通道x方向的平均输运轨迹
Fig. 6. Vertically spatial distribution of bi-dispersed dust particles in a single ratchet unit. Small particles (red balls) are distributed above the lower electrode with a height about 10 mm, while large particles (blue balls) with a height about 9 mm. Here, the red solid line and the blue dash line show the average transport trajectory of small particles and large particles, respectively.
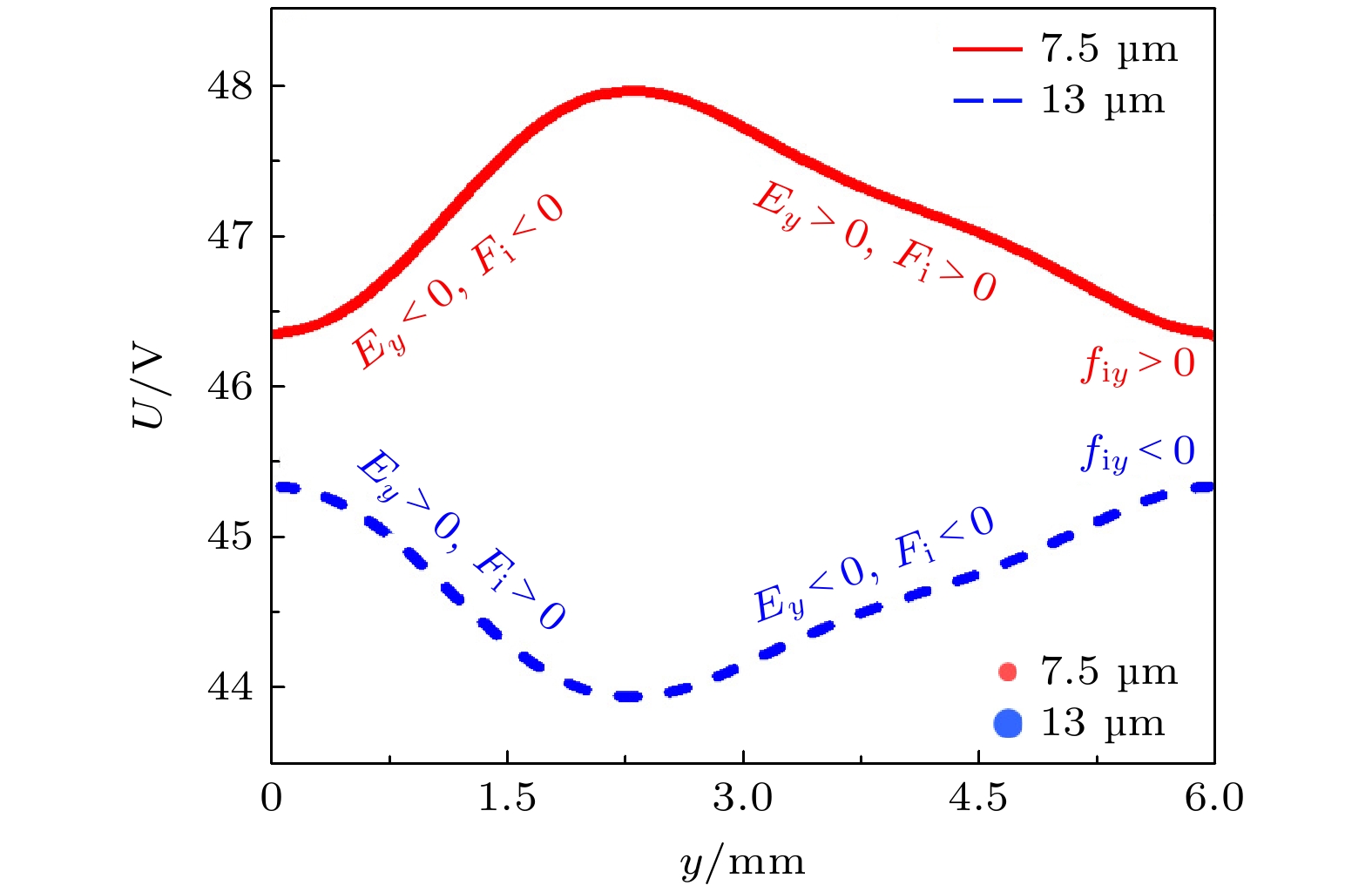
图 7 单个齿槽内颗粒输运轨迹上的电势变化. 红色实线和蓝色虚线分别代表图6中小颗粒和大颗粒有效输运高度处红色实线和蓝色虚线上的电势. 棘轮势两侧的电场$ E_y $ 和离子拖拽力$ F_{\mathrm{i}} $符号相反. 小颗粒受到的离子拖拽力合力$ f_{{\mathrm{i}}y} $与大颗粒受到的离子拖拽力合力符号相反, 造成这两种尘埃颗粒沿相反方向输运
Fig. 7. The potential variation on average transport trajectory in a single ratchet unit. The red solid line and the blue dash line represent the electric potential on the average transport trajectories in Fig 6, respectively. Ion drag forces $ f_{{\mathrm{i}}y} $ on small dust particles and large dust particles are opposite, which make the two sizes of dust particles transport toward the opposite direction.
-
[1] Hänggi P, Marchesoni F 2009 Rev. Mod. Phys. 81 387
Google Scholar
[2] Feynman R P, Leighton R B, Sands M 1963 The Feynman Lectures on Physics (Vol. 1) (America: Addison-Wesley Publishing Company) p46
[3] 郭瑞雪, 艾保全 2023 物理学报 72 200501
Google Scholar
Guo R X, Ai B Q 2023 Acta Phys. Sin. 72 200501
Google Scholar
[4] Roeling E M, Germs W C, Smalbrugge B, Geluk E J, de Vries T, Janssen R A J, Kemerink M 2011 Nat. Mater. 10 51
Google Scholar
[5] Park S, Song J, Kim J S 2019 Sci. Adv. 5 eaav3
Google Scholar
[6] Wilson M R, Solà J, Carlone A, Goldup S M, Lebrasseur N, Leigh D A 2016 Nature 534 235
Google Scholar
[7] Reguera D, Luque A, Burada P S, Schmid G, Rubí J M, Hänggi P 2012 Phys. Rev. Lett. 108 020604
Google Scholar
[8] Skaug M J, Schwemmer C, Fringes S, Rawlings C D, Knoll A W 2018 Science 359 1505
Google Scholar
[9] Dalili A, Samiei E, Hoorfar M 2019 Analyst 144 87
Google Scholar
[10] Hettiarachchi S, Cha H T, Ouyang L X, Mudugamuwa A, An H J, Kijanka G, Kashaninejad N, Nguyen N T, Zhang J 2023 Lab Chip 23 982
Google Scholar
[11] Morfill G E, Ivlev A V 2009 Rev. Mod. Phys. 81 1353
Google Scholar
[12] Du C R, Nosenko V, Thomas H M, Lin Y F, Morfill G E, Ivlev A V 2019 Phys. Rev. Lett. 123 185002
Google Scholar
[13] 洪学仁, 段文山, 孙建安, 石玉仁, 吕克璞 2003 物理学报 52 2671
Google Scholar
Hong X R, Duan W S, Sun J A, Shi Y R, Lü K P 2003 Acta Phys. Sin. 52 2671
Google Scholar
[14] Wang Y M, Guan M, Yu M Y 2020 Contrib. Plasma Phys. 60 9
Google Scholar
[15] Hong Y H, Yuang C X, Jia J S, Gao R L, Wang Y, Zhou Z X, Wang X O, Li H, Wu J 2017 Plasma Sci. Technol. 19 055301
Google Scholar
[16] He Y F, Ai B Q, Dai C X, Song C, Wang R Q, Sun W T, Liu F C, Feng Y 2020 Phys. Rev. Lett. 124 075001
Google Scholar
[17] Cai Z M, Ma Z B, Zhao Y K, Liu F C, He Y F 2023 Appl. Phys. Lett. 123 194102
Google Scholar
[18] Wang S, Zhang N, Zhang S X, Tian M, Cai Y W, Fan W L, Liu F C, He Y F 2022 Chin. Phys. B 31 065202
Google Scholar
[19] Brok W J M, van Dijk J, Bowden M D, Mullen J J A M, Kroesen G M W 2003 J. Phys. D: Appl. Phys. 36 1967
Google Scholar
[20] 段蒙悦, 贾文柱, 张莹莹, 张逸凡, 宋远红 2023 物理学报 72 165202
Google Scholar
Duan M Y, Jia W Z, Zhang Y Y, Zhang Y F, Song Y H 2023 Acta Phys. Sin. 72 165202
Google Scholar
[21] Melzer A 2019 Physics of Dusty Plasma: An Introduction (Switzerland: Springer Nature Switzerland AG) p8
[22] Barnes M S, Keller J H, Forster J C, O’Neill J A, Coultas D K 1992 Phys. Rev. Lett. 68 313
Google Scholar
[23] Fortov V E, Ivlev A V, Khrapak S A, Khrapak A G, Morfill G E 2005 Phys. Rep. 421 1
Google Scholar
[24] Wang K, Huang D, Feng Y 2019 Phys. Rev. E 99 063206
Google Scholar
[25] Zhang R Y, Liu Y H, Huang F, Chen Z Y, Li C Y 2017 Chin. Phys. Lett. 34 075203
Google Scholar

 下载:
下载:
计量
- 文章访问数: 3752
- PDF下载量: 169
- 被引次数: 0
