










-
Self-propelling motionisubiquitous in the biological world, ranging from the molecular-level transportation of motor proteins along the microtubules, to the swimming of bacteria on a micrometer scale. An intriguing topic is to design microdevices or micromotors that can rectify the random motion and convert the energy into mechanical work. Here we design a soft microdevice, which may possess the advantages such as damage resistance, durability and adaptability, by utilizing two-dimensional Langevin dynamics simulation. We use a flexible chain to mimic the soft boundary of microdevice. We investigate the dynamical behaviors of microdevice when it is immersed in a thin film of active particle suspension. We find that the microdevicecan rotateunidirectionally and hence output the work. To uncover the physical mechanism of unidirectional rotation, we calculate the pressure distribution along the soft boundary. The spontaneous symmetry breaking of flexible boundary is the origin of the unidirectional rotation, which can lead to the inhomogeneous pressure distribution and hence torque on ratchet. It is because the persistent motion drives the particles to accumulate near the boundary and induce the soft boundary to deform. Further, we focus on the effect of active force and particle density on the angular velocity. With the increase of active force, the average angular velocity increases monotonically due to the increase of torque. With the increase of the number density of active particles, the average angular velocity increases. This is because the aggregation of a large number of particles is beneficial to the increase of ratchet torque. Additionally, we pay attention to the effect of rotational diffusion rate, Dr, of active particles and the number of ratchet wheels. We find the average angular velocity decreases with the increase of rotation diffusion Dr because ofthe ability of particles to weakly accumulate at high Drs. The average angular velocity also decreases with the increase of the number of ratchet wheels. This is because a large number of ratchet wheels weaken the asymmetry of pressure distribution and hence reduce the torque on wheel. Our work provides a new insight into the design of soft microdevices for studying the non-equilibrium system.
-
Keywords:
- soft boundary /
- directional rotation /
- ratchet wheel /
- molecular dynamics
[1] Marchetti M C, Joanny J F, Ramaswamy S, Liverpool T B, Prost J, Rao M D, AditiSimha R 2013 Rev. Mod. Phys. 85 1143
 Google Scholar
Google Scholar
[2] Gao W, Sattayasamitsathit S, Manesh K M, Weihs D, Wang J 2010 J. Am. Chem. Soc. 132 14403
Google Scholar
[3] Wang W, Castro L A, Hoyos M, Mallouk T E 2012 ACS Nano 6 6122
Google Scholar
[4] Liu R, Sen A 2011 J. Am. Chem. Soc. 133 20064
Google Scholar
[5] Deseigne J, Dauchot O, Chaté H 2010 Phys. Rev. Lett. 105 098001
Google Scholar
[6] Shi X Q, Ma Y Q 2013 Nat. Commun. 4 3013
Google Scholar
[7] Shi X Q, Ma Y Q 2010 Proc. Natl. Acad. Sci. USA 107 11709
Google Scholar
[8] Cates M E, Marenduzzo D, Pagonabarraga I, Tailleur J 2010 Proc. Natl. Acad. Sci. USA 107 11715
Google Scholar
[9] Lei Q L, Ni R, Ma Y Q 2018 ACS Nano 12 6860
Google Scholar
[10] Nikola N, Solon A P, Kafri Y, Kardar M, Tailleur J, Voituriez R 2016 Phys. Rev. Lett. 117 098001
Google Scholar
[11] Hiratsuka Y, Miyata M, Tada T, Uyeda T Q 2006 Proc. Natl. Acad. Sci. USA 103 13618
Google Scholar
[12] Pelling A E, Sehati S, Gralla E B, Valentine J S, Gimzewski J K 2004 Science 305 1147
Google Scholar
[13] Xia Y Q, Shen Z L, Tian W D, Chen K 2019 J. Chem. Phys. 150 154903
Google Scholar
[14] Soong R K, Bachand G D, Neves H P, Olkhovets A G, Craighead H G, Montemagno C D 2000 Science 290 1555
Google Scholar
[15] Sokolov A, Apodaca M M, Grzybowski B A, Aranson I S 2010 Proc. Natl. Acad. Sci. USA 107 969
Google Scholar
[16] Di L R, Angelani L, Dell'arciprete D, Ruocco G, Iebba V, Schippa S, Conte M P, Mecarini F, De A F, Di F E 2010 Proc. Natl. Acad. Sci. USA 107 9541
Google Scholar
[17] Angelani L, Di L R, Ruocco G 2009 Phys. Rev. Lett. 102 48104
Google Scholar
[18] Kaiser A, Löwen H 2014 J. Chem. Phys. 141 158102
[19] Li H S, Zhang B K, Li J, Tian W D, Chen K 2015 J. Chem. Phys. 143 224903
Google Scholar
[20] Tian W D, Gu Y, Guo Y K, Chen K 2017 Chin. Phys. B 26 100502
Google Scholar
[21] Li H S, Wang C, Tian W D, Ma Y Q, Xu C, Zheng N, Chen K 2017 Soft Matter 13 8031
Google Scholar
[22] Wang C, Ma Y Q, Tian W D, Chen K 2018 J. Chem. Phys. 149 164902
Google Scholar
[23] Xia Y Q, Tian W D, Chen K, Ma Y Q 2019 Phys. Chem. Chem. Phys. 21 4487
Google Scholar
[24] Plimpton S, Crozier P, Thompson A 2015 J. Appl. Phys. 2 4740
[25] Humphrey W, Dalke A, Schulten K 1996 J. Molec. Graphics. 14 33
Google Scholar
[26] Eisenstecken T, Gompper G, Winkler R G 2017 J. Chem. Phys. 146 154903
Google Scholar
[27] Bechinger C, Leonardo R D, Löwen H, Reichhardt C, Volpe G, Volpe G 2016 Rev. Mod. Phys. 88 045006
Google Scholar
[28] Redner G S, Hagan M F, Baskaran A 2013 Phys. Rev. Lett. 110 055701
Google Scholar
[29] Fily Y, Baskaran A, Hagan M F 2014 Soft Matter 10 5609
Google Scholar
-

图 1 棘轮在活性粒子浴中(绿色部分)的初始示意结构 虚线部分表示刚性支架, 红色表示柔性边界, 左上部分绿色粒子中的黑色箭头表示活性粒子的推进力方向, 右上部分为一段边界上的粒子排布, 粒子间间距为0.25σ
Fig. 1. The initial structure of flexible boundary (red) in the active particle bath (green). The dashed lines represent four rigid trestles. The black arrow in the green particle indicates the active force direction of the active particle in the upper left. The upper right part is the particle arrangement on a boundary. The spacing between the particles is 0.25σ.

图 2 (a)四支架棘轮随时间转动的示意图, 图示中刚性支架被忽略, 左上图黑点代表棘轮质心, 其中黑色箭头表示从质心到一支点的方向以此表明棘轮发生转动, 右下图是该情况下的旋转角度与角速度随着时间的变化曲线图; (b)上图为棘轮柔性边界的曲率分布图, 下图为压力分布图, 其中棘轮支架数为Ns = 4, 活性粒子的数密度为φ = 0.025, 旋转扩散系数取Dr = 0.0001, 驱动力F = 40
Fig. 2. (a) Schematic diagram of the ratchet rotation with time for Ns = 4, φ = 0.025, Dr = 0.0001, F = 40. The black dot on the top left figure represents the center of mass of the ratchet; the black arrows denote the orientation from the center of mass of ratchet to the fixed point of boundary to indicate the rotation of the ratchet. The right-down figure shows the time evolution of angle and angular velocity of ratchet. (b) The curvature distribution (up) of boundary and the pressure distribution (down) around it
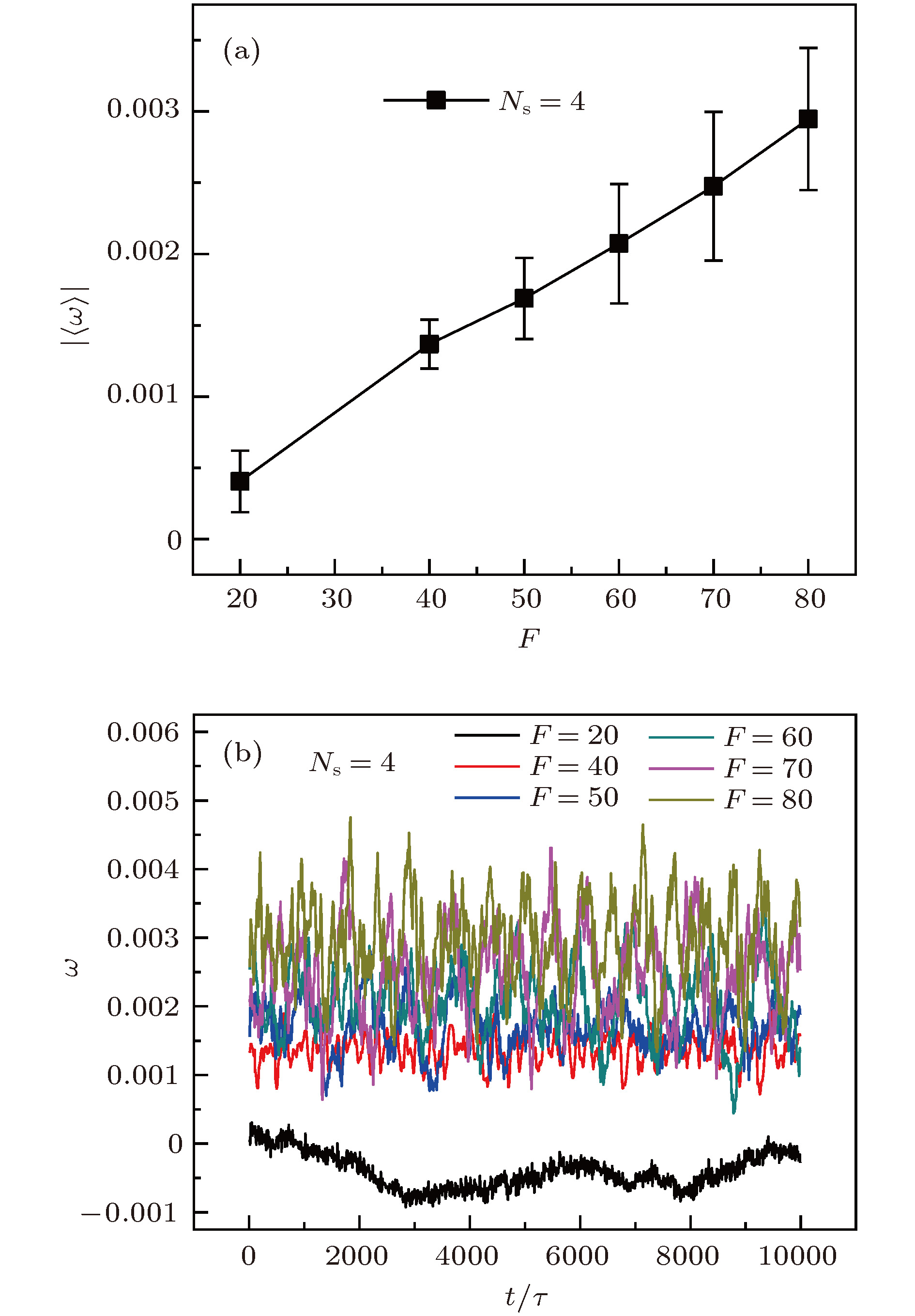
图 3 支架数为4、不同活性力的作用下, 棘轮的旋转角速度 (a)平均角速度, (b)瞬时角速度, 误差棒表示平均角速度的标准方差
Fig. 3. (a) Average angular velocity and (b) instantaneous angular velocity for the four rigid trestles with various active forces. The error bars represent the standard the deviations of angular velocity of rigid trestles.

图 4 棘轮的平均角速度与粒子数密度之间的关系, 内部两张插图分别对应活性粒子密度φ = 0.025和φ = 0.1, 误差棒表示平均角速度的标准方差
Fig. 4. Average angular velocity vs the number density of active particles. The insets are typical snapshots for φ = 0.025 and φ = 0.1. The error bars represent the standard the deviations of angular velocity.

图 5 (a)不同旋转扩散系数Dr下棘轮的旋转角速度与时间的关系; (b)平均旋转角速度与Dr的关系, 内部两插图分别对应旋转扩散系数Dr = 0.0001和Dr = 0.01, 误差棒表示平均角速度的标准方差
Fig. 5. (a) The angular velocity as a function of time for various rotational diffusion coefficients, Drs. (b) The average angular velocity as a function of Dr. The insets are typical snapshots for Dr = 0.0001和and Dr = 0.1. The error bars represent the standard the deviations of angular velocity.
-
[1] Marchetti M C, Joanny J F, Ramaswamy S, Liverpool T B, Prost J, Rao M D, AditiSimha R 2013 Rev. Mod. Phys. 85 1143
Google Scholar
[2] Gao W, Sattayasamitsathit S, Manesh K M, Weihs D, Wang J 2010 J. Am. Chem. Soc. 132 14403
Google Scholar
[3] Wang W, Castro L A, Hoyos M, Mallouk T E 2012 ACS Nano 6 6122
Google Scholar
[4] Liu R, Sen A 2011 J. Am. Chem. Soc. 133 20064
Google Scholar
[5] Deseigne J, Dauchot O, Chaté H 2010 Phys. Rev. Lett. 105 098001
Google Scholar
[6] Shi X Q, Ma Y Q 2013 Nat. Commun. 4 3013
Google Scholar
[7] Shi X Q, Ma Y Q 2010 Proc. Natl. Acad. Sci. USA 107 11709
Google Scholar
[8] Cates M E, Marenduzzo D, Pagonabarraga I, Tailleur J 2010 Proc. Natl. Acad. Sci. USA 107 11715
Google Scholar
[9] Lei Q L, Ni R, Ma Y Q 2018 ACS Nano 12 6860
Google Scholar
[10] Nikola N, Solon A P, Kafri Y, Kardar M, Tailleur J, Voituriez R 2016 Phys. Rev. Lett. 117 098001
Google Scholar
[11] Hiratsuka Y, Miyata M, Tada T, Uyeda T Q 2006 Proc. Natl. Acad. Sci. USA 103 13618
Google Scholar
[12] Pelling A E, Sehati S, Gralla E B, Valentine J S, Gimzewski J K 2004 Science 305 1147
Google Scholar
[13] Xia Y Q, Shen Z L, Tian W D, Chen K 2019 J. Chem. Phys. 150 154903
Google Scholar
[14] Soong R K, Bachand G D, Neves H P, Olkhovets A G, Craighead H G, Montemagno C D 2000 Science 290 1555
Google Scholar
[15] Sokolov A, Apodaca M M, Grzybowski B A, Aranson I S 2010 Proc. Natl. Acad. Sci. USA 107 969
Google Scholar
[16] Di L R, Angelani L, Dell'arciprete D, Ruocco G, Iebba V, Schippa S, Conte M P, Mecarini F, De A F, Di F E 2010 Proc. Natl. Acad. Sci. USA 107 9541
Google Scholar
[17] Angelani L, Di L R, Ruocco G 2009 Phys. Rev. Lett. 102 48104
Google Scholar
[18] Kaiser A, Löwen H 2014 J. Chem. Phys. 141 158102
[19] Li H S, Zhang B K, Li J, Tian W D, Chen K 2015 J. Chem. Phys. 143 224903
Google Scholar
[20] Tian W D, Gu Y, Guo Y K, Chen K 2017 Chin. Phys. B 26 100502
Google Scholar
[21] Li H S, Wang C, Tian W D, Ma Y Q, Xu C, Zheng N, Chen K 2017 Soft Matter 13 8031
Google Scholar
[22] Wang C, Ma Y Q, Tian W D, Chen K 2018 J. Chem. Phys. 149 164902
Google Scholar
[23] Xia Y Q, Tian W D, Chen K, Ma Y Q 2019 Phys. Chem. Chem. Phys. 21 4487
Google Scholar
[24] Plimpton S, Crozier P, Thompson A 2015 J. Appl. Phys. 2 4740
[25] Humphrey W, Dalke A, Schulten K 1996 J. Molec. Graphics. 14 33
Google Scholar
[26] Eisenstecken T, Gompper G, Winkler R G 2017 J. Chem. Phys. 146 154903
Google Scholar
[27] Bechinger C, Leonardo R D, Löwen H, Reichhardt C, Volpe G, Volpe G 2016 Rev. Mod. Phys. 88 045006
Google Scholar
[28] Redner G S, Hagan M F, Baskaran A 2013 Phys. Rev. Lett. 110 055701
Google Scholar
[29] Fily Y, Baskaran A, Hagan M F 2014 Soft Matter 10 5609
Google Scholar

 下载:
下载:

计量
- 文章访问数: 11065
- PDF下载量: 98
- 被引次数: 0
