










-
绝对重力测量的精度主要受振动噪声的限制. 振动补偿是一种简单可行的振动噪声处理方法, 它通过传感器探测振动噪声来对测量结果进行修正. 现阶段对于不同传感器的振动补偿性能缺乏系统的分析与评估, 仅停留在应用阶段. 本文从理论出发分析了传感器性能对补偿效果的影响, 并通过实验评估了不同振动环境下不同传感器的振动补偿性能. 实验结果显示, 采用低噪声地震计的振动补偿效果主要受带宽和量程的限制, 在安静环境下可实现优于百微伽的单次测量标准差, 但补偿效果随振动噪声高频成分的增强而降低, 在动态环境下地震计则受量程限制而无法工作. 采用加速度计的振动补偿效果主要受分辨率的限制, 在复杂和动态环境下均可实现毫伽量级的单次测量标准差. 本文为振动补偿技术应用于绝对重力测量提供了振动传感器选型的理论和实践依据, 有望为振动补偿技术的进一步发展提供技术支撑.Absolute gravity measurement refers to the measurement of the absolute value of gravitational acceleration (g, approximately 9.8 m/s2). The precision of absolute gravity measurement is limited mainly by vibration noises. Vibration correction is a simple and feasible way to deal with vibration noises, which corrects the measurement results by detecting vibration noises with a sensor. At present, the vibration correction performance of different sensors lacks systematic analysis and evaluation. In this paper, the theoretical analysis of how the sensor characteristics affect the correction performance is carried out. The vibration correction performances of three sensors, two different seismometers and one accelerometer, are evaluated experimentally in the three cases with different vibration noises. The experimental results show that the correction precision obtained by using low-noise seismometer is limited mainly by its bandwidth and range. In case I i.e. the quiet environment, the standard deviation of corrected results obtained by using both seismometers can reach tens of μGal (1 μGal = 10–8 m/s2), which is close to that obtained by using an ultra-low-frequency vibration isolator. However, in case II i.e. the noisy environment, the standard deviation of corrected results obtained by both seismometers increase to hundreds of μGal due to the enhancement of high-frequency vibration components. This means that the correction performances of both seismometers deteriorate, and the performance of seismometer with narrower bandwidth turns even worse. Moreover, two seismometers cannot even work in case III with stronger vibration noises due to the range limitation. On the other hand, the correction precision obtained by using accelerometer is affected mainly by its resolution which is on the order of mGal (1mGal = 10–5 m/s2). Its bandwidth can reach hundreds of or even thousands of hertz and its range is generally over ±2 g, which is large enough to meet the needs for noisy and dynamic applications. In case I, the standard deviation after correction with accelerometer is larger than that before correction. This is because the intensity of vibration noises in this case is close to or even smaller than the self-noise of accelerometer so that it could not be detected effectively by accelerometer. In case II, the resolution of accelerometer is sufficient to detect the vibration noises effectively. The standard deviation of the results is reduced from 2822 μGal to 1374 μGal after correction with accelerometer, and equal to a precision of 0.1 mGal after 100 drops. In case III where the amplitude of vibration noise rises to 0.1 m/s2 and seismometer cannot work, the accelerometer could still achieve a precision of 0.3 mGal after 100 drops. The systematic deviation is corrected from –1158 mGal to –285 μGal and the standard deviation is reduced from 34 mGal to 3.3 mGal. Therefore, the low-noise seismometer is more suitable for vibration correction in a quiet environment with stable foundation, which could realize a standard deviation superior to hundreds of μGal, while the accelerometer is more appropriate for vibration correction in a complex or dynamic environment, which could achieve a standard deviation of mGal-level. Finally, the present results and analysis provide a theoretical guidance for selecting and designing the sensors in vibration correction applications.
-
Keywords:
- absolute gravity measurement /
- vibration correction /
- vibration sensor
[1] Marson I, Faller J 1986 J. Phys. E:Sci. Instrum. 19 22
 Google Scholar
Google Scholar
[2] Faller J 2003 Metrologia 39 425
Google Scholar
[3] Faller J 2005 J. Res. Nat. Inst. Stand. Technol. 110 559
Google Scholar
[4] Marson I 2012 Int. J. Geophys. 2012 687813
Google Scholar
[5] Niebauer T M, Sasagawa G S, Faller J E, Hilt R, Klopping F 1995 Metrologia 32 159
Google Scholar
[6] 胡华, 伍康, 申磊, 李刚, 王力军 2012 物理学报 61 099101
Google Scholar
Hu H, Wu K, Shen L, Li G, Wang L J 2012 Acta Phys. Sin. 61 099101
Google Scholar
[7] Saulson P R 1984 Rev. Sci. Instrum. 55 1315
Google Scholar
[8] Haubrich R A, McCamy K 1969 Rev. Geophys. 7 539
Google Scholar
[9] Sorrells G G, Douze E J 1974 J. Geophys. Res. 79 4908
Google Scholar
[10] Cessaro R K 1994 Bull. Seismol. Soc. Am. 84 142
Google Scholar
[11] Timmen L, Rder R H, Schnüll M 1993 Bulletin Géodésique 67 71
Google Scholar
[12] Svitlov S 2012 Metrologia 49 706
Google Scholar
[13] Wen Y, Wu K, Guo M Y, Wang L J 2021 IEEE Trans. Instrum. Meas. 70 1003607
Google Scholar
[14] Rinker R, Faller J 1981 Proceedings of Precision Measurement and Fundamental Constants Gaithersburg, Maryland, USA, June 8–12, 1981 p411
[15] Brown J M, Niebauer T M, Klingele E 2001 Int. Assoc. Geod. Symp. 123 223
Google Scholar
[16] Wang G, Hu H, Wu K, Wang L J 2017 Meas. Sci. Technol. 28 035001
Google Scholar
[17] Qian J, Wang G, Wu K, Wang L J 2018 Meas. Sci. Technol. 29 025005
Google Scholar
[18] 许翱鹏 2016 博士学位论文 (浙江: 浙江大学)
Xu A P 2016 Ph. D. Dissertation (Zhejiang: Zhejiang University) (in Chinese)
[19] Le Gouët J, Mehlstäubler T, Kim J, Merlet S, Clairon A, Landragin A, Pereira dos Santos F 2008 Appl. Phys. B 92 133
Google Scholar
[20] Merlet S, Le Gouët J, Bodart Q, Clairon A, Landragin A, Pereira dos Santos F, Rouchon P 2009 Metrologia 46 87
Google Scholar
[21] Baumann H 2012 Geophys. Prospect. 6 361
Google Scholar
[22] Bidel Y, Zahzam N, Blanchard C, Bonnin A, Cadoret M, Bresson A, Rouxel D, Lequentrec-Lalancette M F 2018 Nat. Commun. 9 627
Google Scholar
[23] Bidel Y, Zahzam N, Bresson A, Blanchard C, Cadoret M, Olesen A V, Forsberg R 2020 J. Geod. 94 20
Google Scholar
[24] 程冰, 周寅, 陈佩军, 张凯军, 朱栋, 王凯楠, 翁堪兴, 王河林, 彭树萍, 王肖隆, 吴彬, 林强 2021 物理学报 70 040304
Google Scholar
Cheng B, Zhou Y, Chen P J, Zhang K J, Zhu D, Wang K N, Weng K X, Wang H L, Peng S P, Wang X L, Wu B, Lin Q 2021 Acta Phys. Sin. 70 040304
Google Scholar
[25] 龙剑锋, 黄大伦, 滕云田, 吴琼, 郭欣 2012 地震学报 34 865
Google Scholar
Long J F, Huang D L, Teng Y T, Wu Q, Guo X 2012 Acta Seismologica Sinica 34 865
Google Scholar
[26] Wu S Q, Feng J Y, Li C Y, Su D W, Wang Q Y, Hu R, Hu L S, Xu J Y, Ji W X, Ullrich C, Palinkas V, Kostelecký J, Bilker-Koivula M, Näränen J, Merlet S, Le Moigne N, Mizushima S, Francis O, Choi I M, Newel D 2020 Metrologia 57 07002
Google Scholar
[27] Guo M Y, Wu K, Yao J M, Wen Y, Wang L J 2021 IEEE Trans. Instrum. Meas. 70 1004310
Google Scholar
-
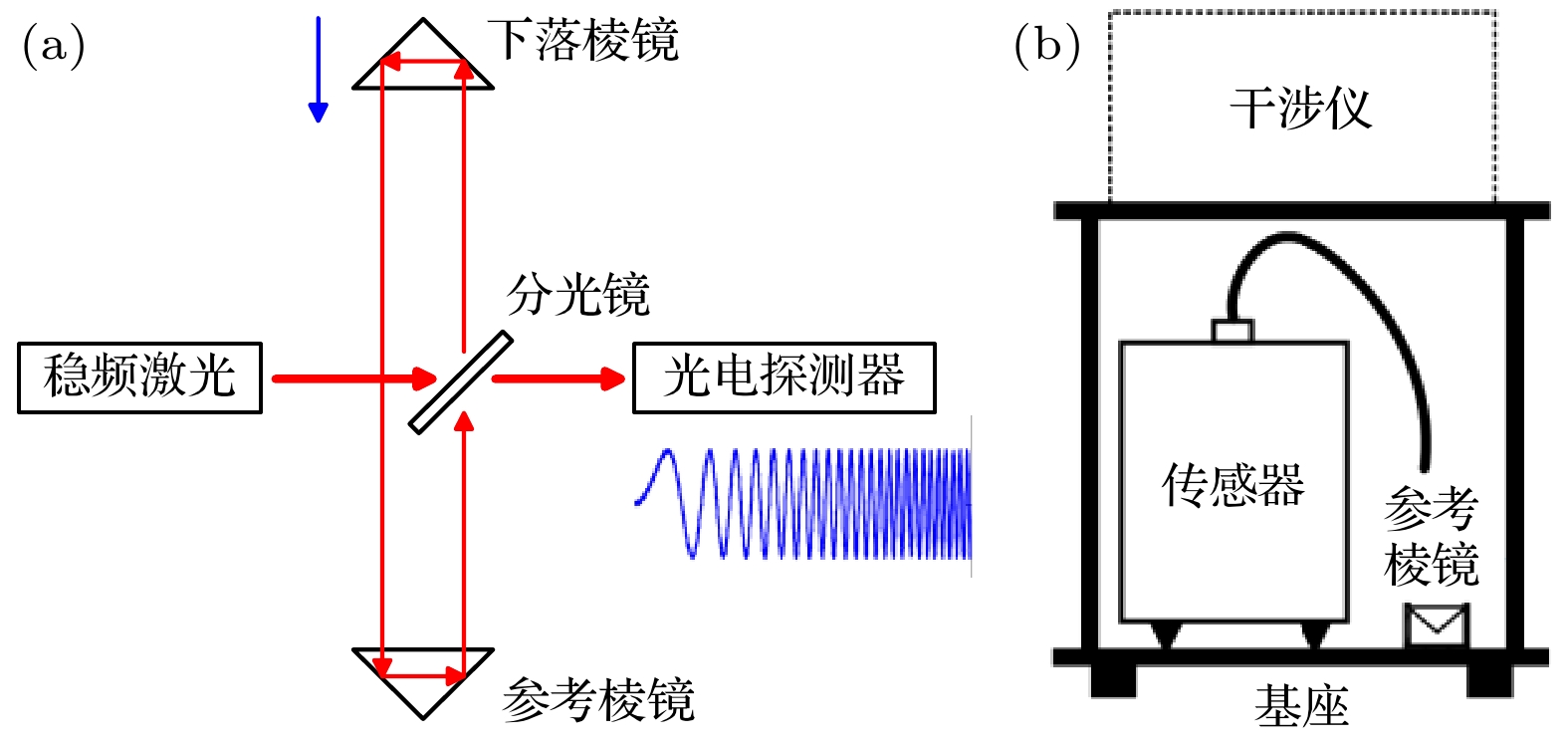
图 1 (a)激光干涉测量和(b)振动补偿的原理示意图
Fig. 1. Schematic diagram of (a) laser interferometry and (b) vibration correction.

图 2 传感器输出与参考棱镜运动的关系
Fig. 2. Relationship between the output of sensor and the motion of reference retro-reflector.
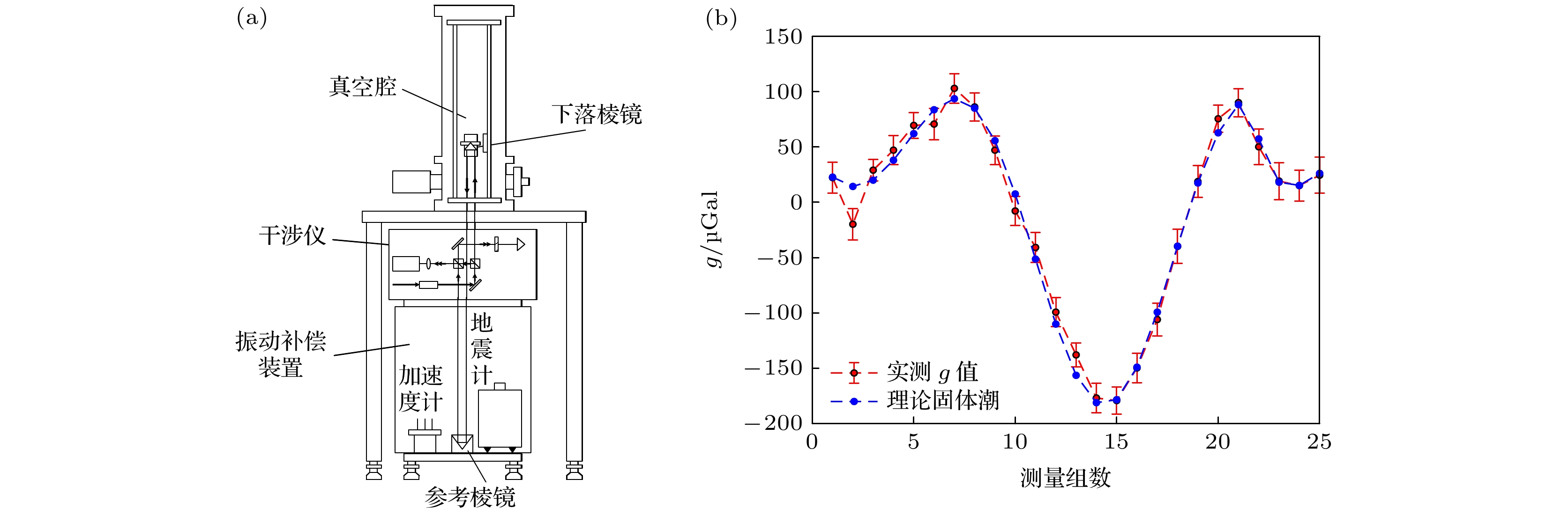
图 3 (a)基于振动补偿的T-3型绝对重力仪示意图; (b) 基于超低频垂直隔振的T-3型高精度绝对重力仪在西安中心地震台的重力测量结果.
Fig. 3. (a) Schematic diagram of T-3 type absolute gravimeter using vibration correction; (b) tidal gravity measurement conducted by T-3 type high-precision absolute gravimeter using ultra-low frequency vertical vibration isolator at Xi’an Seismological Station.
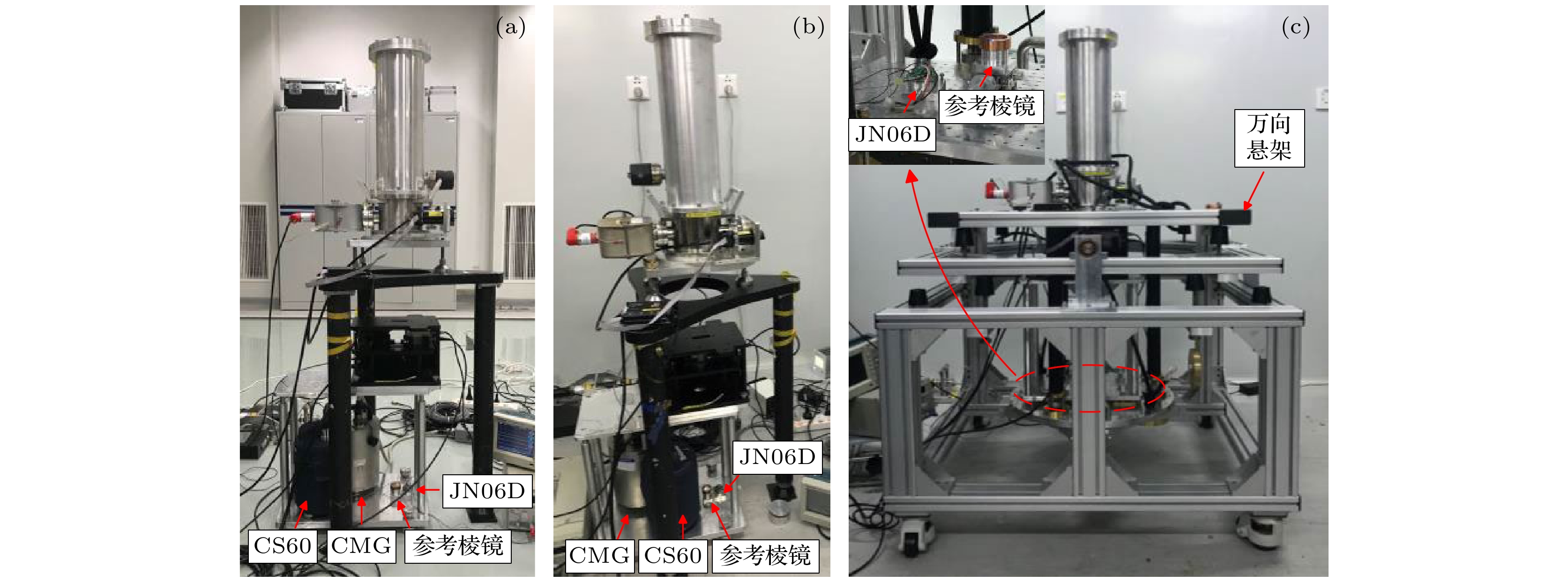
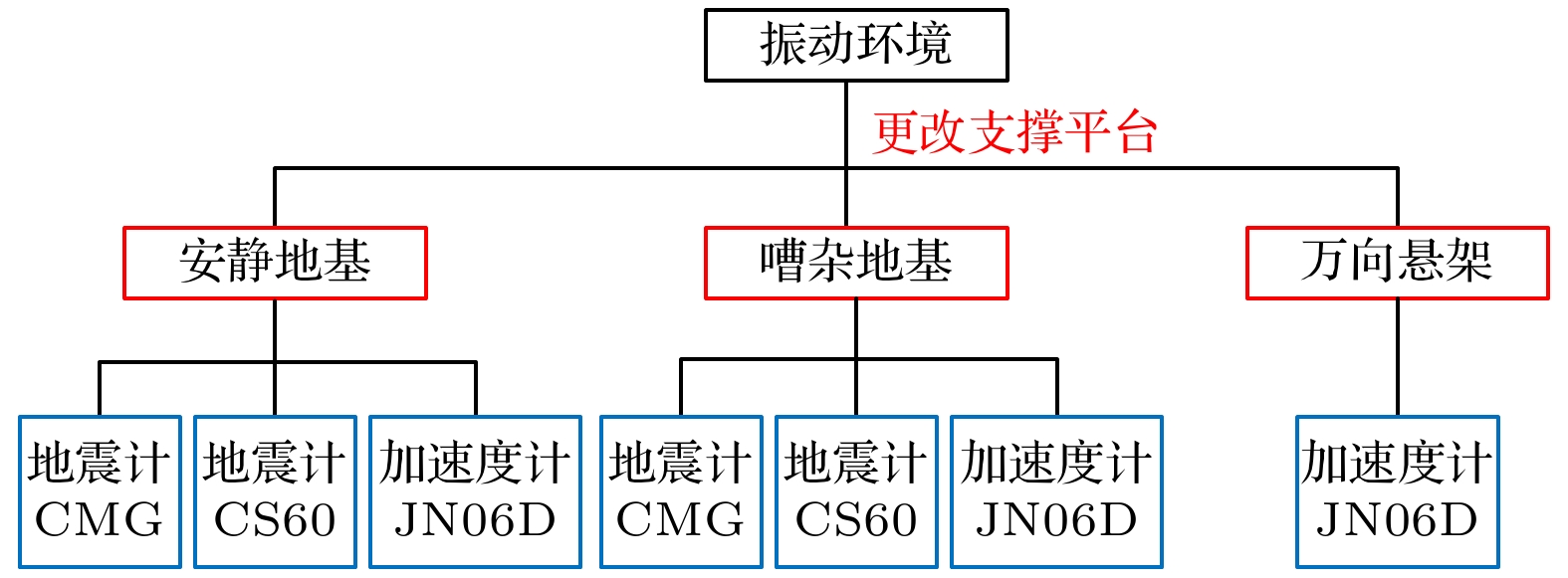
图 5 (a)安静地基; (b)嘈杂地基; (c)万向悬架上的实验装置
Fig. 5. Experimental configuration on the (a) quiet ground, (b) noisy ground, (c) gimbal suspension.

图 6 安静地基上的结果对比 (a)逐点分布; (b)含误差带的均值(k = 2)
Fig. 6. Comparison of results on the quiet ground: (a) Drop-to-drop scatter of g; (b) mean value with expanded uncertainty (k = 2).
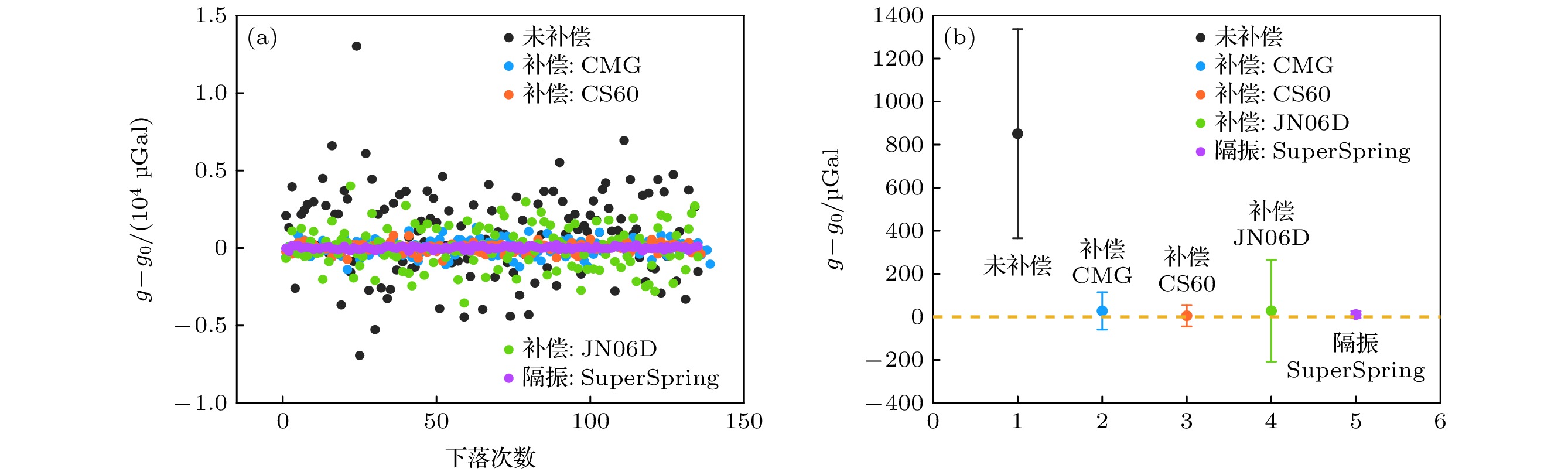
图 7 嘈杂地基上的结果对比 (a)逐点分布; (b)含误差带的均值(k = 2)
Fig. 7. Comparison of results on the noisy ground: (a) Drop-to-drop scatter of g; (b) mean value with expanded uncertainty (k = 2).

图 8 万向悬架上JN06D测得单次下落过程中的振动加速度
Fig. 8. Vibration acceleration measured by JN06D on the gimbal during a single drop.
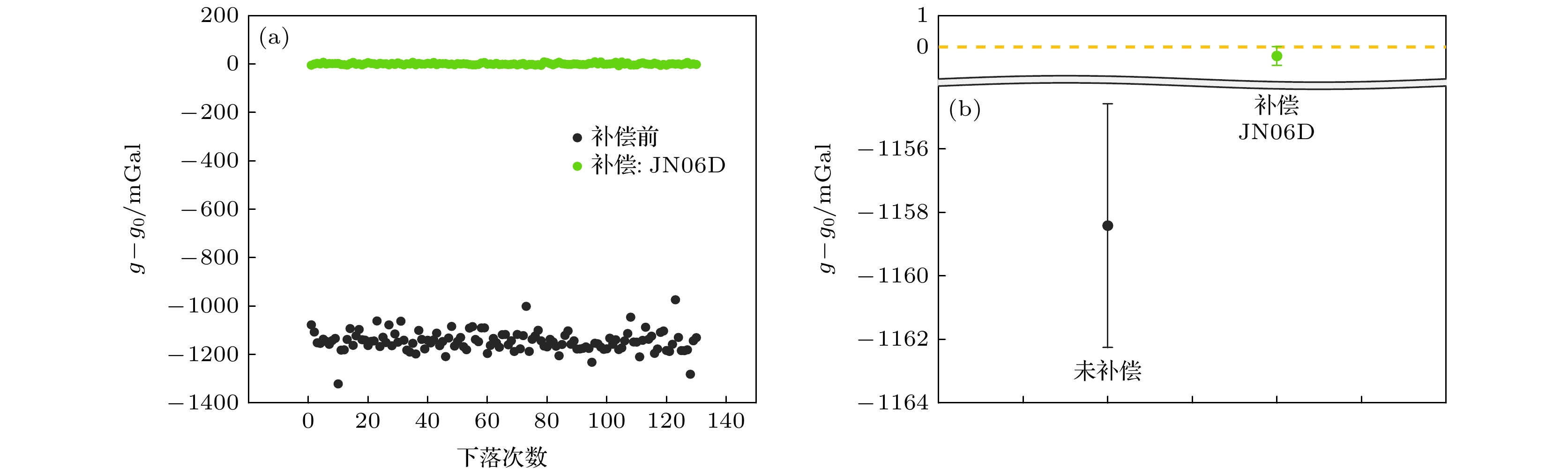
图 9 万向悬架上的结果对比 (a)逐点分布; (b)含误差带的均值(k = 2)
Fig. 9. Comparison of results on the gimbal: (a) Drop-to-drop scatter of g; (b) mean value with expanded uncertainty (k = 2).

图 10 安静地基上CMG单次补偿的情况 (a)原始拟合残差与探测位移拟合残差对比; (b)补偿前后拟合残差对比
Fig. 10. Correction for single drop using CMG data on the quiet ground: (a) Residuals of measured trajectory Sm and measured vibration noise Nm; (b) residuals of measured trajectory Sm before and after correction.
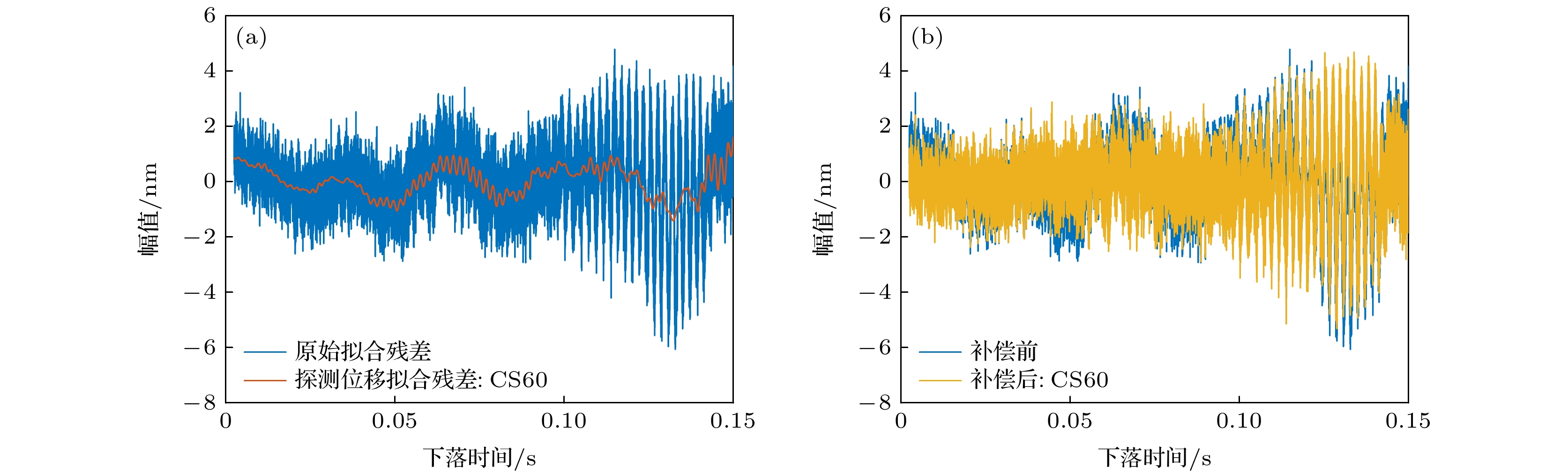
图 11 安静地基上CS60单次补偿的情况 (a)原始拟合残差与探测位移拟合残差对比; (b)补偿前后拟合残差对比
Fig. 11. Correction for single drop using CS60 data on the quiet ground: (a) Residuals of measured trajectory Sm and measured vibration noise Nm; (b) residuals of measured trajectory Sm before and after correction.
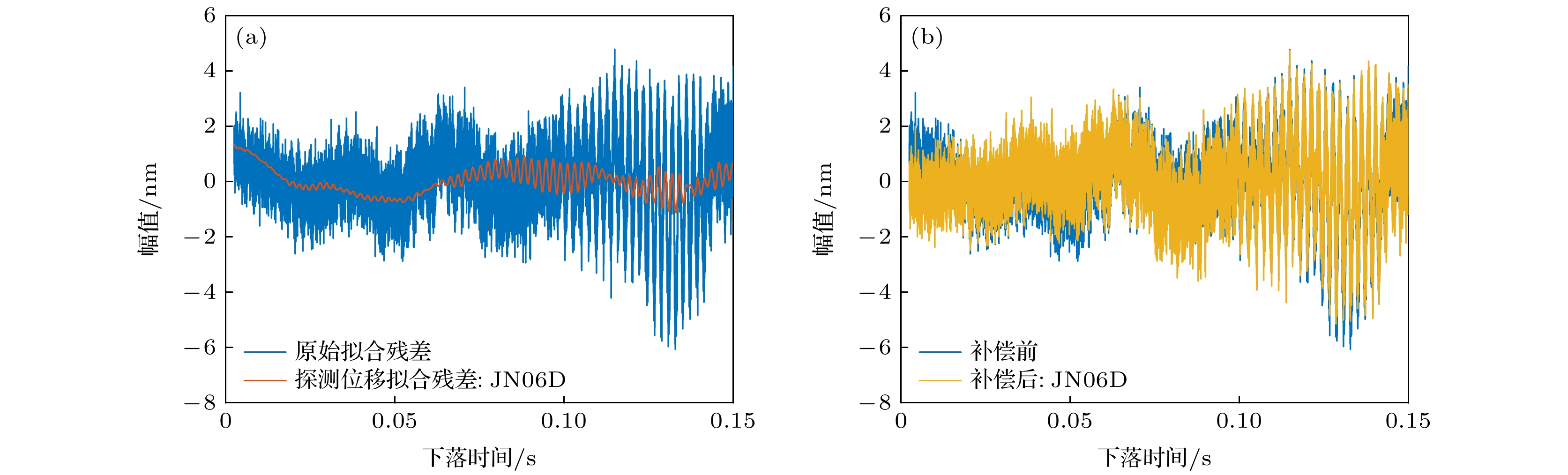
图 12 安静地基上JN06 D单次补偿的情况 (a)原始拟合残差与探测位移拟合残差对比; (b)补偿前后拟合残差对比
Fig. 12. Correction for single drop using JN06 D data on the quiet ground: (a) Residuals of measured trajectory Sm and measured vibration noise Nm; (b) residuals of measured trajectory Sm before and after correction.

图 13 嘈杂地基上CMG单次补偿的情况 (a)原始拟合残差与探测位移拟合残差对比; (b)补偿前后拟合残差对比
Fig. 13. Correction for single drop using CMG data on the noisy ground: (a) Residuals of measured trajectory Sm and measured vibration noise Nm; (b) residuals of measured trajectory Sm before and after correction.

图 14 嘈杂地基上CS60单次补偿的情况 (a)原始拟合残差与探测位移拟合残差对比; (b)补偿前后拟合残差对比
Fig. 14. Correction for single drop using CS60 data on the noisy ground: (a) Residuals of measured trajectory Sm and measured vibration noise Nm; (b) residuals of measured trajectory Sm before and after correction.
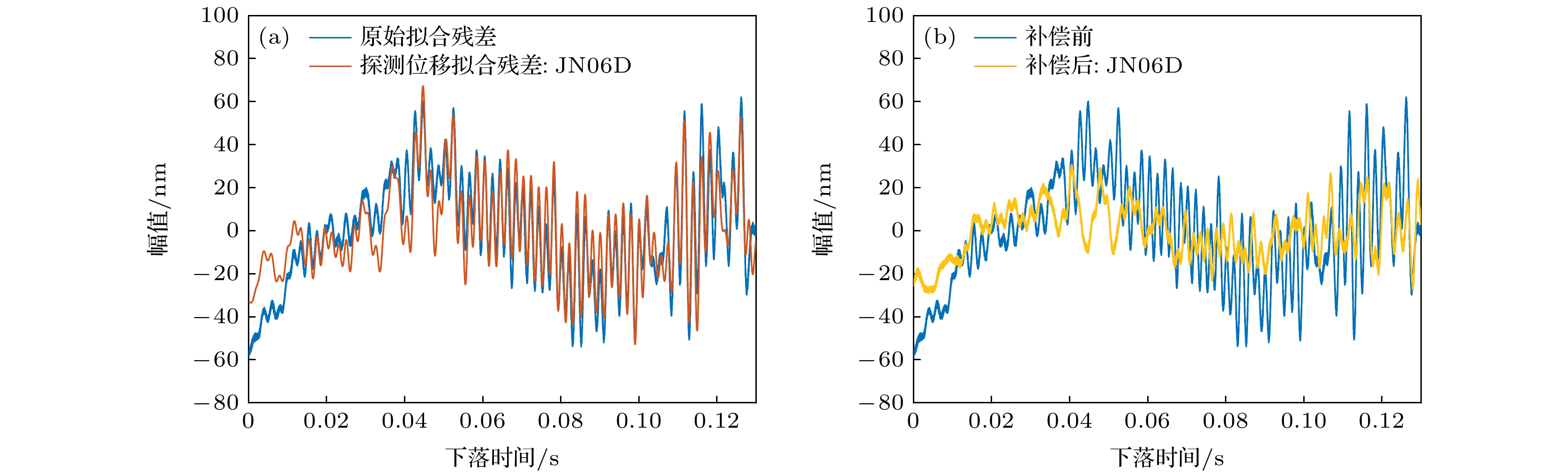
图 15 嘈杂地基上JN06 D单次补偿的情况 (a)原始拟合残差与探测位移拟合残差对比; (b)补偿前后拟合残差对比
Fig. 15. Correction for single drop using JN06 D data on the noisy ground: (a) Residuals of measured trajectory Sm and measured vibration noise Nm; (b) residuals of measured trajectory Sm before and after correction.
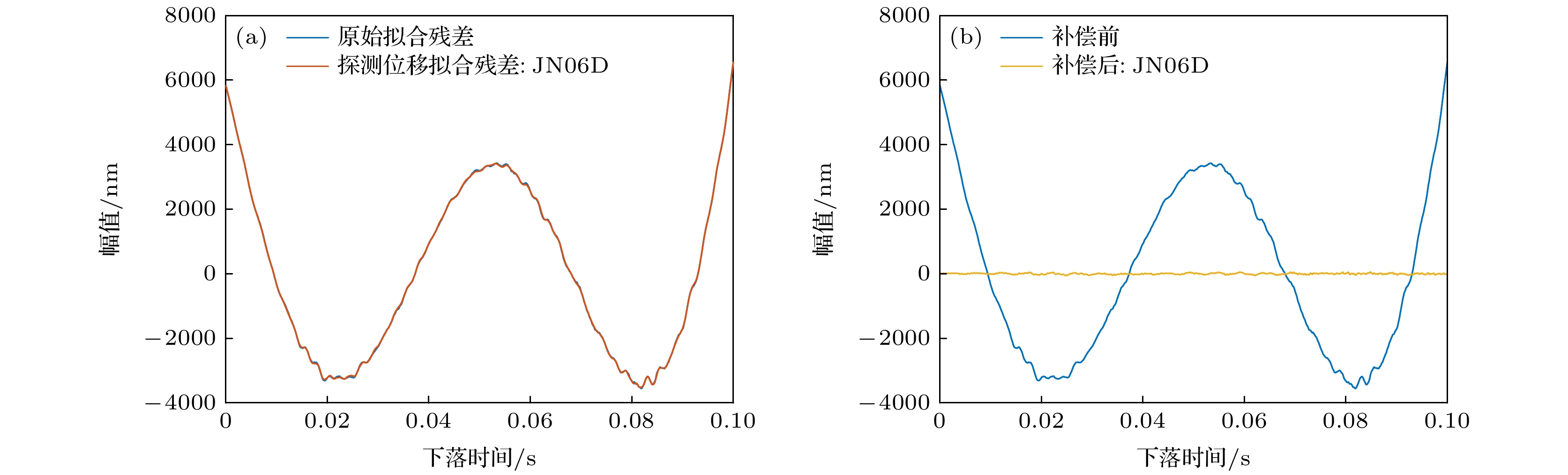
图 16 万向悬架上JN06 D单次补偿的情况 (a)原始拟合残差与探测位移拟合残差对比; (b) 补偿前后拟合残差对比
Fig. 16. Correction for single drop using JN06 D data on the gimbal: (a) Residuals of the measured trajectory Sm, and the measured vibration noise Nm; (b) residuals of the measured trajectory Sm before and after correction.
表 1 振动传感器性能指标
Table 1. Characteristics of vibration sensors.
型号 自噪声 –3 dB带宽 量程 CMG-3ESP 低于NLNM (40 s ~ 16 Hz) 0.0083—50 Hz 5 mm/s CS60 低于NLNM (100 s ~ 15 Hz) 0.0167—80 Hz 10 mm/s (1 Hz) JN06D –115 ~ –120 $ \rm dB\cdot g/\sqrt{Hz} $ (0 ~ 100 Hz) DC ~1360 Hz ± 30 g  下载: 导出CSV
下载: 导出CSV
表 2 实验结果
Table 2. Results of vibration correction experiments.
未补偿 地震计CMG 地震计CS60 加速度计JN06D 隔振SuperSpring 安静
地基系统偏差Δg/μGal –8 –9 –1 –75 3 单次标准差STD/μGal 120 71 66 578 68 嘈杂
地基系统偏差Δg/μGal 841 28 5 18 8 单次标准差STD/μGal 2822 511 289 1374 93 万向
悬架系统偏差Δg/μGal –1158415 –285 单次标准差STD/μGal 42793 3353
下载: 导出CSV
-
[1] Marson I, Faller J 1986 J. Phys. E:Sci. Instrum. 19 22
Google Scholar
[2] Faller J 2003 Metrologia 39 425
Google Scholar
[3] Faller J 2005 J. Res. Nat. Inst. Stand. Technol. 110 559
Google Scholar
[4] Marson I 2012 Int. J. Geophys. 2012 687813
Google Scholar
[5] Niebauer T M, Sasagawa G S, Faller J E, Hilt R, Klopping F 1995 Metrologia 32 159
Google Scholar
[6] 胡华, 伍康, 申磊, 李刚, 王力军 2012 物理学报 61 099101
Google Scholar
Hu H, Wu K, Shen L, Li G, Wang L J 2012 Acta Phys. Sin. 61 099101
Google Scholar
[7] Saulson P R 1984 Rev. Sci. Instrum. 55 1315
Google Scholar
[8] Haubrich R A, McCamy K 1969 Rev. Geophys. 7 539
Google Scholar
[9] Sorrells G G, Douze E J 1974 J. Geophys. Res. 79 4908
Google Scholar
[10] Cessaro R K 1994 Bull. Seismol. Soc. Am. 84 142
Google Scholar
[11] Timmen L, Rder R H, Schnüll M 1993 Bulletin Géodésique 67 71
Google Scholar
[12] Svitlov S 2012 Metrologia 49 706
Google Scholar
[13] Wen Y, Wu K, Guo M Y, Wang L J 2021 IEEE Trans. Instrum. Meas. 70 1003607
Google Scholar
[14] Rinker R, Faller J 1981 Proceedings of Precision Measurement and Fundamental Constants Gaithersburg, Maryland, USA, June 8–12, 1981 p411
[15] Brown J M, Niebauer T M, Klingele E 2001 Int. Assoc. Geod. Symp. 123 223
Google Scholar
[16] Wang G, Hu H, Wu K, Wang L J 2017 Meas. Sci. Technol. 28 035001
Google Scholar
[17] Qian J, Wang G, Wu K, Wang L J 2018 Meas. Sci. Technol. 29 025005
Google Scholar
[18] 许翱鹏 2016 博士学位论文 (浙江: 浙江大学)
Xu A P 2016 Ph. D. Dissertation (Zhejiang: Zhejiang University) (in Chinese)
[19] Le Gouët J, Mehlstäubler T, Kim J, Merlet S, Clairon A, Landragin A, Pereira dos Santos F 2008 Appl. Phys. B 92 133
Google Scholar
[20] Merlet S, Le Gouët J, Bodart Q, Clairon A, Landragin A, Pereira dos Santos F, Rouchon P 2009 Metrologia 46 87
Google Scholar
[21] Baumann H 2012 Geophys. Prospect. 6 361
Google Scholar
[22] Bidel Y, Zahzam N, Blanchard C, Bonnin A, Cadoret M, Bresson A, Rouxel D, Lequentrec-Lalancette M F 2018 Nat. Commun. 9 627
Google Scholar
[23] Bidel Y, Zahzam N, Bresson A, Blanchard C, Cadoret M, Olesen A V, Forsberg R 2020 J. Geod. 94 20
Google Scholar
[24] 程冰, 周寅, 陈佩军, 张凯军, 朱栋, 王凯楠, 翁堪兴, 王河林, 彭树萍, 王肖隆, 吴彬, 林强 2021 物理学报 70 040304
Google Scholar
Cheng B, Zhou Y, Chen P J, Zhang K J, Zhu D, Wang K N, Weng K X, Wang H L, Peng S P, Wang X L, Wu B, Lin Q 2021 Acta Phys. Sin. 70 040304
Google Scholar
[25] 龙剑锋, 黄大伦, 滕云田, 吴琼, 郭欣 2012 地震学报 34 865
Google Scholar
Long J F, Huang D L, Teng Y T, Wu Q, Guo X 2012 Acta Seismologica Sinica 34 865
Google Scholar
[26] Wu S Q, Feng J Y, Li C Y, Su D W, Wang Q Y, Hu R, Hu L S, Xu J Y, Ji W X, Ullrich C, Palinkas V, Kostelecký J, Bilker-Koivula M, Näränen J, Merlet S, Le Moigne N, Mizushima S, Francis O, Choi I M, Newel D 2020 Metrologia 57 07002
Google Scholar
[27] Guo M Y, Wu K, Yao J M, Wen Y, Wang L J 2021 IEEE Trans. Instrum. Meas. 70 1004310
Google Scholar

 下载:
下载:
计量
- 文章访问数: 8530
- PDF下载量: 178
- 被引次数: 0
