










-
首先提出一种新型局部有源忆阻器, 并分析该忆阻器的频率特性、局部有源性及非易失性. 然后将新型局部有源忆阻器引入二维Hindmarsh-Rose神经元和二维FitzHugh-Nagumo神经元, 构建新型忆阻耦合异质神经元模型. 在数值仿真中, 通过改变耦合强度, 发现该模型具有周期尖峰放电模式、混沌尖峰放电模式、周期簇发放电模式及随机簇发放电模式. 最后基于Lyapunov稳定性理论和预定义时间稳定性理论, 提出一种新型预定义时间同步策略, 并将该策略应用于新型忆阻耦合异质神经元的混沌同步中. 结果表明, 与有限时间同步策略、固定时间同步策略和传统预定义时间同步策略相比, 新型预定义时间同步策略的实际收敛时间最小. 研究新型忆阻耦合异质神经元的放电模式和混沌同步有助于探索大脑的神经功能, 并在神经信号处理及保密通信领域中具有重要意义.
-
关键词:
- 预定义时间同步策略 /
- 局部有源忆阻器 /
- 异质神经元 /
- 内部不确定性和外部干扰
The processing and transmission of biological neural information are realized via firing activities of neurons in different regions of brain. Memristors are regarded as ideal devices for emulating biological synapses because of their nanoscale size, non-volatility and synapse-like plasticity. Hence, investigating firing modes of memristor-coupled heterogeneous neurons is significant. This work focuses on modelling, firing modes and chaos synchronization of a memristor-coupled heterogeneous neuron. First, a novel locally active memristor is proposed, and its frequency characteristics, local activity, and non-volatility are analyzed. Then, the novel locally active memristor is introduced into the two-dimensional HR neuron and the two-dimensional FHN neuron to construct a novel memristor-coupled heterogeneous neuron model. In numerical simulations, by changing the coupling strength, it is found that the model exhibits the periodic spike firing mode, the chaotic spike firing mode, the periodic burst firing mode, and the random burst firing mode. Besides, the dynamic behavior of the novel memristor-coupled heterogeneous neuron can switch between periodic behavior and chaotic behavior by changing the initial state. Finally, based on the Lyapunov stability theory and the predefined-time stability theory, a novel predefined-time synchronization strategy is proposed and used to realize the chaos synchronization of the novel memristor-coupled heterogeneous neuron. The results show that compared with a finite-time synchronization strategy, a fixed-time synchronization strategy and a traditional predefined-time synchronization strategy, the novel predefined-time synchronization strategy has a short actual convergence time. Studying the firing modes and chaotic synchronization of the novel memristor-coupled heterogeneous neuron can help explore the neural functions of the brain and is also important in processing the neural signal and secure communication fields.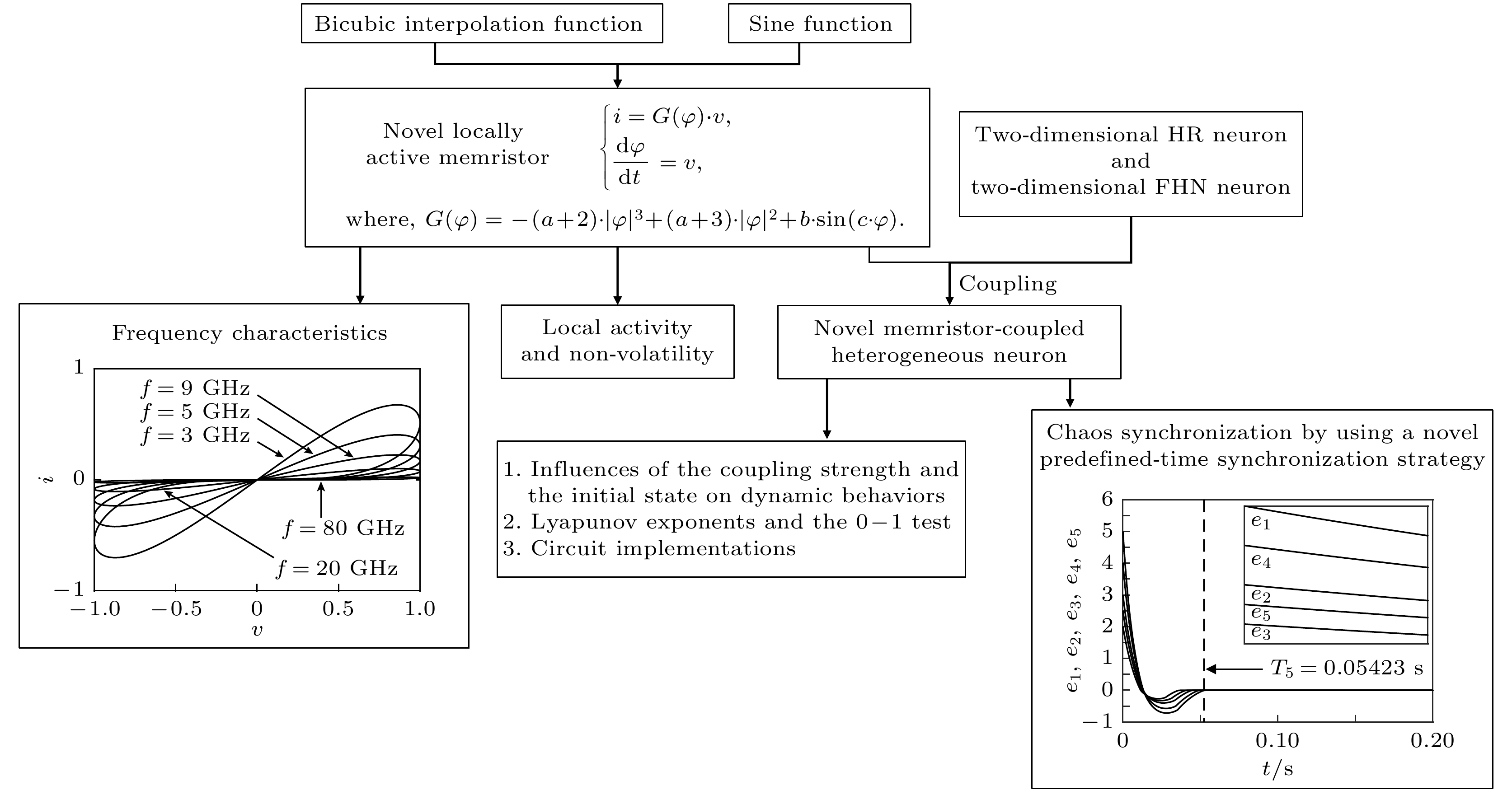
-
Keywords:
- predefined-time synchronization strategy /
- locally active memristor /
- heterogeneous neuron /
- internal uncertainties and external disturbances
[1] Pecora L M, Carroll T L 1990 Phys. Rev. Lett. 64 821
 Google Scholar
Google Scholar
[2] Syed Ali M, Stamov G, Stamova I, Ibrahim T F, Dawood A A, Osman Birkea F M 2023 Mathematics 11 4248
Google Scholar
[3] Zhang J R, Lu J G, Jin X C, Yang X Y 2023 Neural Networks 167 680
Google Scholar
[4] Wu X, Liu S T, Wang H Y, Wang Y 2023 ISA Trans. 136 114
Google Scholar
[5] Ping J, Zhu S, Shi M X, Wu S M, Shen M Q, Liu X Y, Wen S P 2023 IEEE Trans. Netw. Sci. Eng. 10 3609
Google Scholar
[6] Beyhan S 2024 Chaos Soliton. Fract. 180 114578
Google Scholar
[7] Shi P, Li X, Zhang Y Q, Yan J J 2023 IEEE Trans. Circuits Syst. I-Regul. Pap. 70 1381
Google Scholar
[8] Chen Q, Li B, Yin W, Jiang X W, Chen X Y 2023 Chaos Soliton. Fract. 171 113440
Google Scholar
[9] Zhao N N, Qiao Y H, Miao J, Duan L J 2024 IEEE Trans. Fuzzy Syst. 32 1978
Google Scholar
[10] Zhang Y L, Yang L Q, Kou K I, Liu Y 2023 Neural Networks 165 274
Google Scholar
[11] Wang S S, Jian J G 2023 Chaos Soliton. Fract. 174 113790
Google Scholar
[12] Zhou X H, Cao J D, Wang X 2023 Neural Networks 160 97
Google Scholar
[13] Mahemuti R, Abdurahman A 2023 Mathematics 11 1291
Google Scholar
[14] Chakraborty A, Veeresha P 2024 Chaos Soliton. Fract. 182 114810
Google Scholar
[15] Yu F, Kong X X, Yao W, Zhang J, Cai S, Lin H R, Jin J 2024 Chaos Soliton. Fract. 179 114440
Google Scholar
[16] Sun W, Li B W, Wu A L, Guo W L, Wu X Q 2023 IEEE T. Cybern. 53 6277
Google Scholar
[17] Ding D, Tang Z, Park J H, Wang Y, Ji Z C 2023 IEEE T. Cybern. 53 887
Google Scholar
[18] Surendar R, Muthtamilselvan M, Ahn K 2024 Chaos Soliton. Fract. 181 114659
Google Scholar
[19] Saeed N A, Saleh H A, El-Ganaini W A, Awrejcewicz J, Mahmoud H A 2024 Chin. J. Phys. 88 311
Google Scholar
[20] Ji X Y, Dong Z K, Han Y F, Lai C S, Zhou G D, Qi D L 2023 IEEE Trans. Consum. Electron. 69 1005
Google Scholar
[21] Dong Z K, Ji X Y, Lai C S, Qi D L, Zhou G D, Lai L L 2023 IEEE Consum. Electron. Mag. 12 94
Google Scholar
[22] Liu J Y, Xiong F E, Zhou Y, Duan S K, Hu X F 2024 IEEE Trans. Cogn. Dev. Syst. 16 794
Google Scholar
[23] Lei Z Y, Yang J C, Qiu H S, Zhang X Z, Liu J Z 2024 Electronics 13 2229
Google Scholar
[24] Jin P P, Wang G Y, Liang Y, Iu H H C, Chua L O 2021 IEEE Trans. Circuits Syst. I-Regul. Pap. 68 4419
Google Scholar
[25] Kuwahara T, Oshio R, Kimura M, Zhang R Y, Nakashima Y 2024 Neurocomputing 593 127792
Google Scholar
[26] Mannan Z I, Adhikari S P, Yang C J, Budhathoki R K, Kim H, Chua L 2019 IEEE Trans. Neural Netw. Learn. Syst. 30 3458
Google Scholar
[27] Chua L O 2005 Int. J. Bifurcat. Chaos 15 3435
Google Scholar
[28] Chua L O 2014 Semicond. Sci. Technol. 29 104001
Google Scholar
[29] Yan S H, Zhang Y Y, Ren Y, Sun X, Cui Y, Li L 2023 Nonlinear Dynam. 111 17547
Google Scholar
[30] Huang L L, Wang S T, Lei T F, Huang K Y, Li C B 2024 Int. J. Bifurcat. Chaos 34 2450022
Google Scholar
[31] Li C L, Wang X, Du J R, Li Z J 2023 Nonlinear Dynam. 111 21333
Google Scholar
[32] Wang M J, Peng J W, He S B, Zhang X, Iu H H C 2023 Fractal Fract. 7 818
Google Scholar
[33] Zhang S H, Zhang H L, Lin H R, Wang C 2024 Nonlinear Dynam. 112 12411
Google Scholar
[34] Jia J, Wang F, Zeng Z G 2022 Neurocomputing 505 413
Google Scholar
[35] Guo Z H, Li Z J, Wang M J, Ma M L 2023 Chin. Phys. B 32 038701
Google Scholar
[36] Cao H B, Wang F Q 2021 IEEE Trans. Very Large Scale Integr. (VLSI) Syst. 29 617
Google Scholar
[37] Liu W, Wang F Q, Ma X K 2015 Int. J. Numer. Model. 28 335
Google Scholar
[38] Xu B, Zou S T, Bai L B, Chen K, Zhao J 2024 Nonlinear Dynam. 112 1395
Google Scholar
[39] Chua L O 2018 Appl. Phys. A-Mater. Sci. Process. 124 563
Google Scholar
[40] Dong Y J, Wang G Y, Chen G R, Shen Y R, Ying J J 2020 Commun. Nonlinear Sci. Numer. Simul. 84 105203
Google Scholar
[41] Lin H R, Wang C H, Deng Q L, Xu C, Deng Z K, Zhou C 2021 Nonlinear Dynam. 106 959
Google Scholar
[42] Wei Z C 2011 Phys. Lett. A 376 102
Google Scholar
[43] 包涵, 包伯成, 林毅, 王将, 武花干 2016 物理学报 65 180501
Google Scholar
Bao H, Bao B C, Lin Y, Wang J, Wu H G 2016 Acta Phys. Sin. 65 180501
Google Scholar
[44] Gottwald G A, Melbourne I 2009 SIAM J. Appl. Dyn. Syst. 8 129
Google Scholar
[45] Bhat S P, Bernstein D S 2000 SIAM J. Control Optim. 38 751
Google Scholar
[46] Polyakov A 2012 IEEE Trans. Autom. Control 57 2106
Google Scholar
[47] Sánchez-Torres J D, Gómez-Gutiérrez D, López E, Loukianov A G 2018 IMA J. Math. Control Inf. 35 i1
Google Scholar
[48] Wongvanich N, Roongmuanpha N, Tangsrirat W 2023 IEEE Access 11 88388
Google Scholar
[49] Kang X Y, Chai L, Liu H K 2023 Int. J. Control Autom. Syst. 21 1210
Google Scholar
[50] Ni J K, Liu C X, Liu K, Liu L 2014 Chin. Phys. B 23 100504
Google Scholar
[51] Shirkavand M, Pourgholi M 2018 Chaos Soliton. Fract. 113 135
Google Scholar
[52] Han S 2023 J. Mar. Sci. Eng. 11 2191
Google Scholar
-
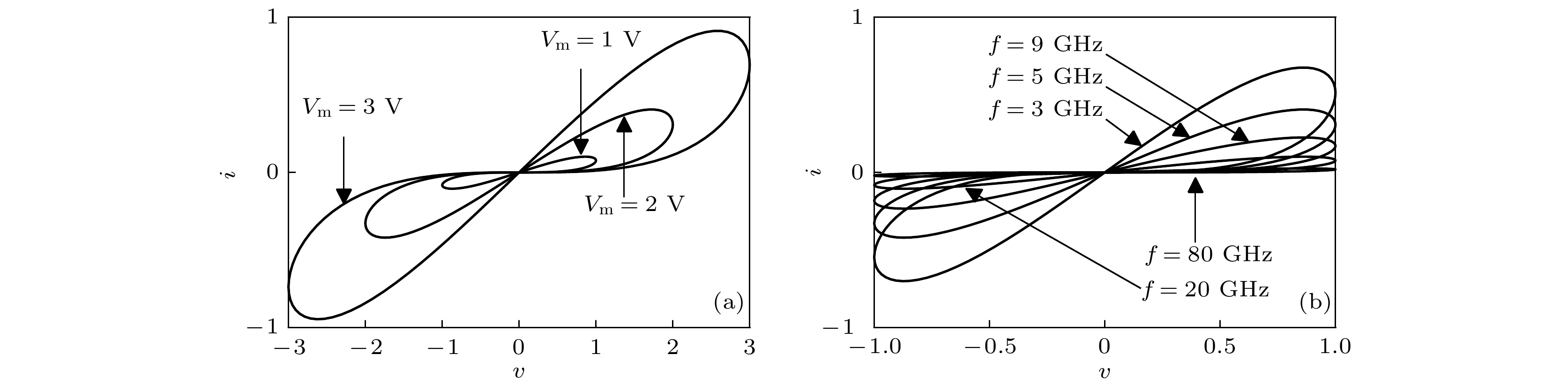
图 1 新型局部有源忆阻器的紧磁滞回线 (a) f = 20 GHz, 不同幅值; (b) Vm= 1 V, 不同频率
Fig. 1. Pinched hysteresis loop of the novel locally active memristor: (a) Different amplitudes for f = 20 GHz; (b) different frequencies for Vm= 1 V.
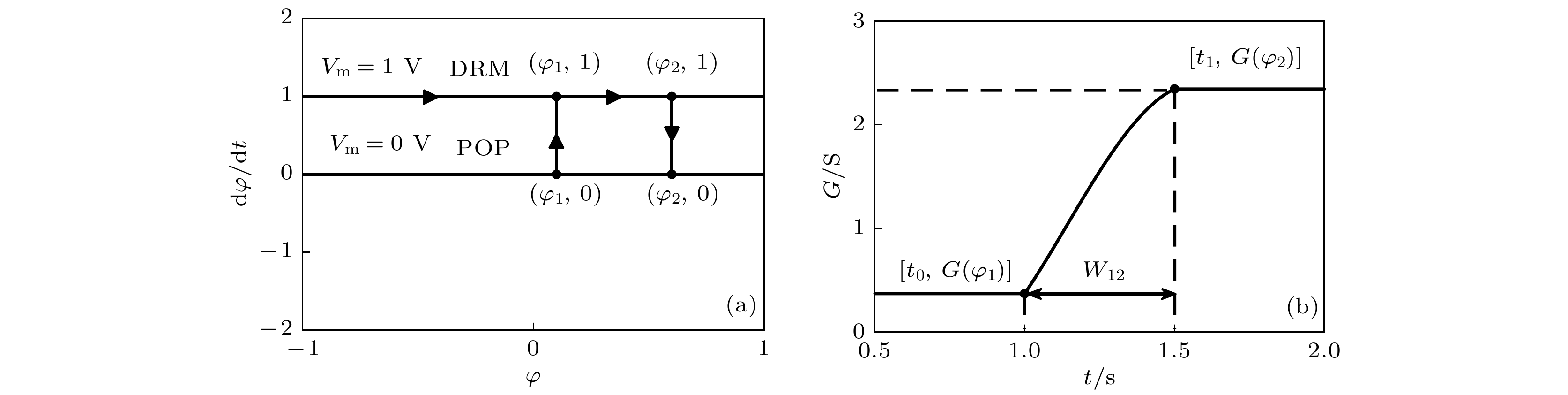
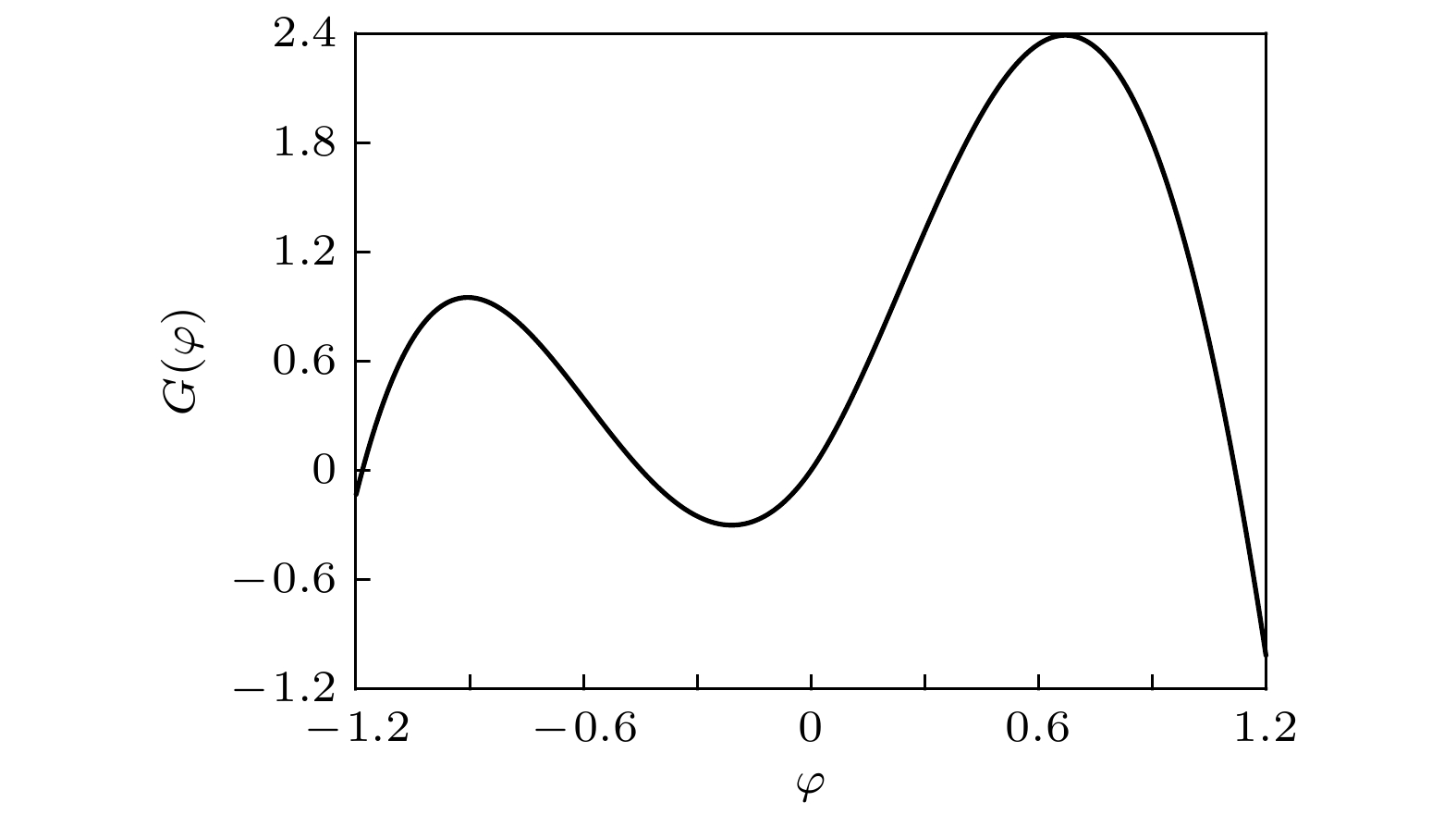
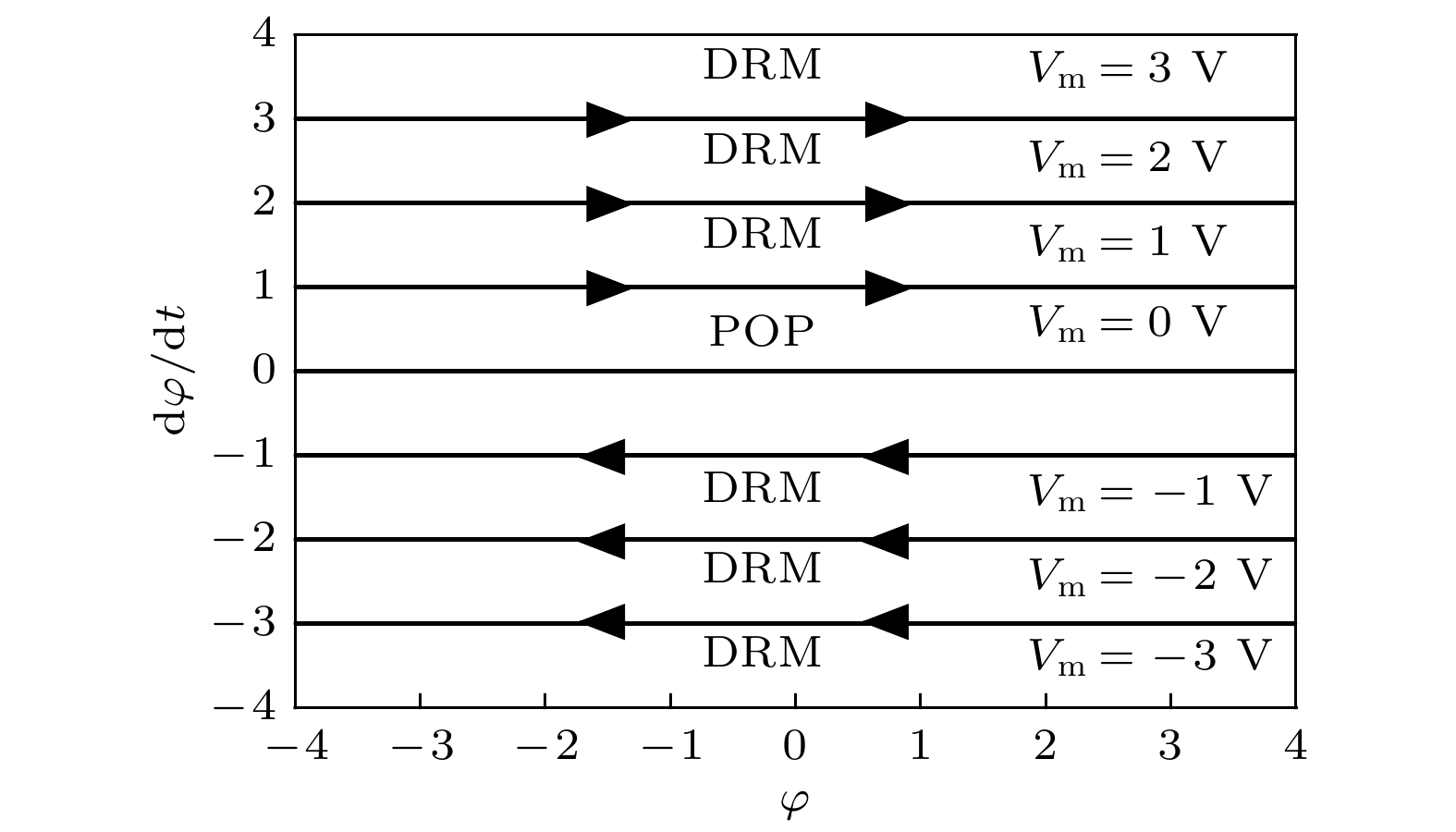
图 4 (a)状态$ {\varphi _1} $切换到状态$ {\varphi _2} $(正电压脉冲的幅值Vm= 1 V); (b)低电平忆导$G\left( {{\varphi _1}} \right)$切换到高电平忆导$G\left( {{\varphi _2}} \right)$(正电压脉冲的幅值Vm= 1 V)
Fig. 4. (a) Switching from the state $ {\varphi _1} $ to the state $ {\varphi _2} $ (a positive voltage pulse with amplitude Vm= 1 V); (b) switching from the low-level memductance $G\left( {{\varphi _1}} \right)$ to the high-level memductance $G\left( {{\varphi _2}} \right)$(a positive voltage pulse with amplitude Vm= 1 V).
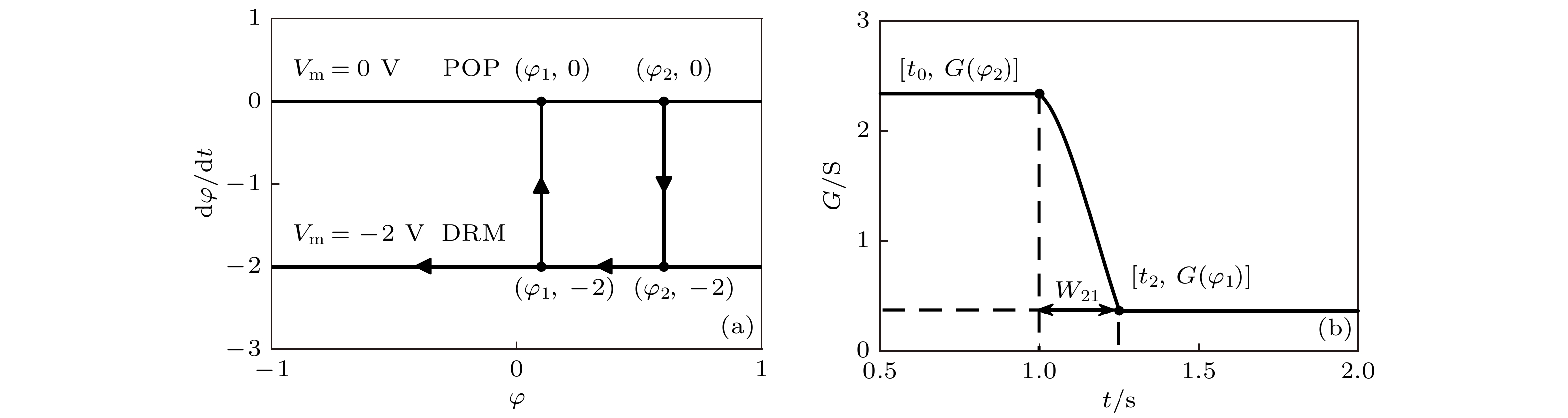
图 5 (a) 状态$ {\varphi _2} $切换到状态$ {\varphi _1} $ (负电压脉冲的幅值Vm= –2 V); (b) 高电平忆导$G\left( {{\varphi _2}} \right)$切换到低电平忆导$G\left( {{\varphi _1}} \right)$ (负电压脉冲的幅值Vm= –2 V)
Fig. 5. (a) Switching from the state $ {\varphi _2} $ to the state $ {\varphi _1} $ (a negative voltage pulse with amplitude Vm= –2 V); (b) switching from the high-level memductance $G\left( {{\varphi _2}} \right)$ to the low-level memductance $G\left( {{\varphi _1}} \right)$(a negative voltage pulse with amplitude Vm= –2 V).
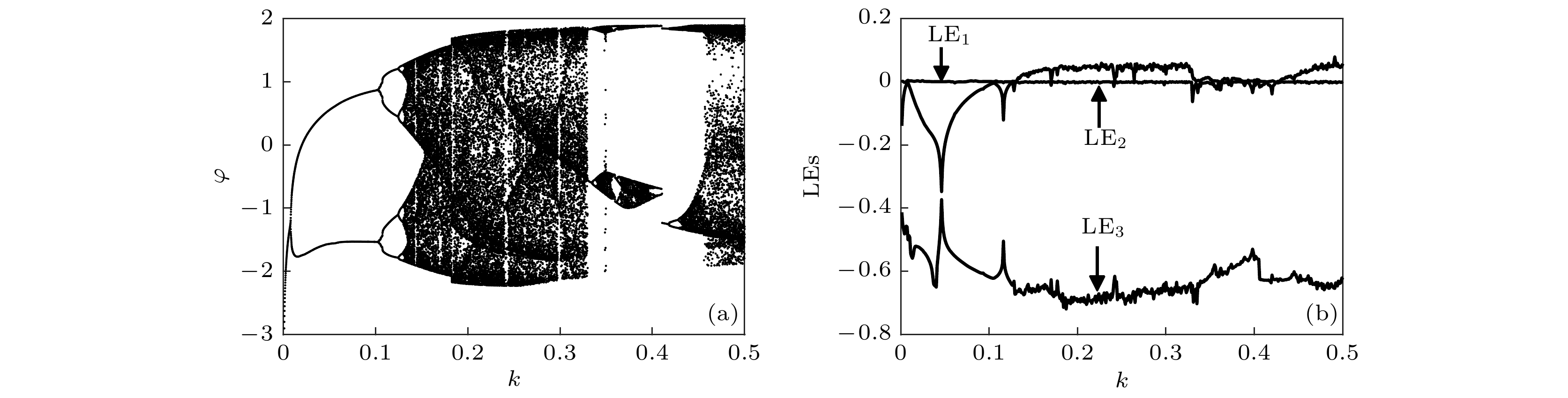
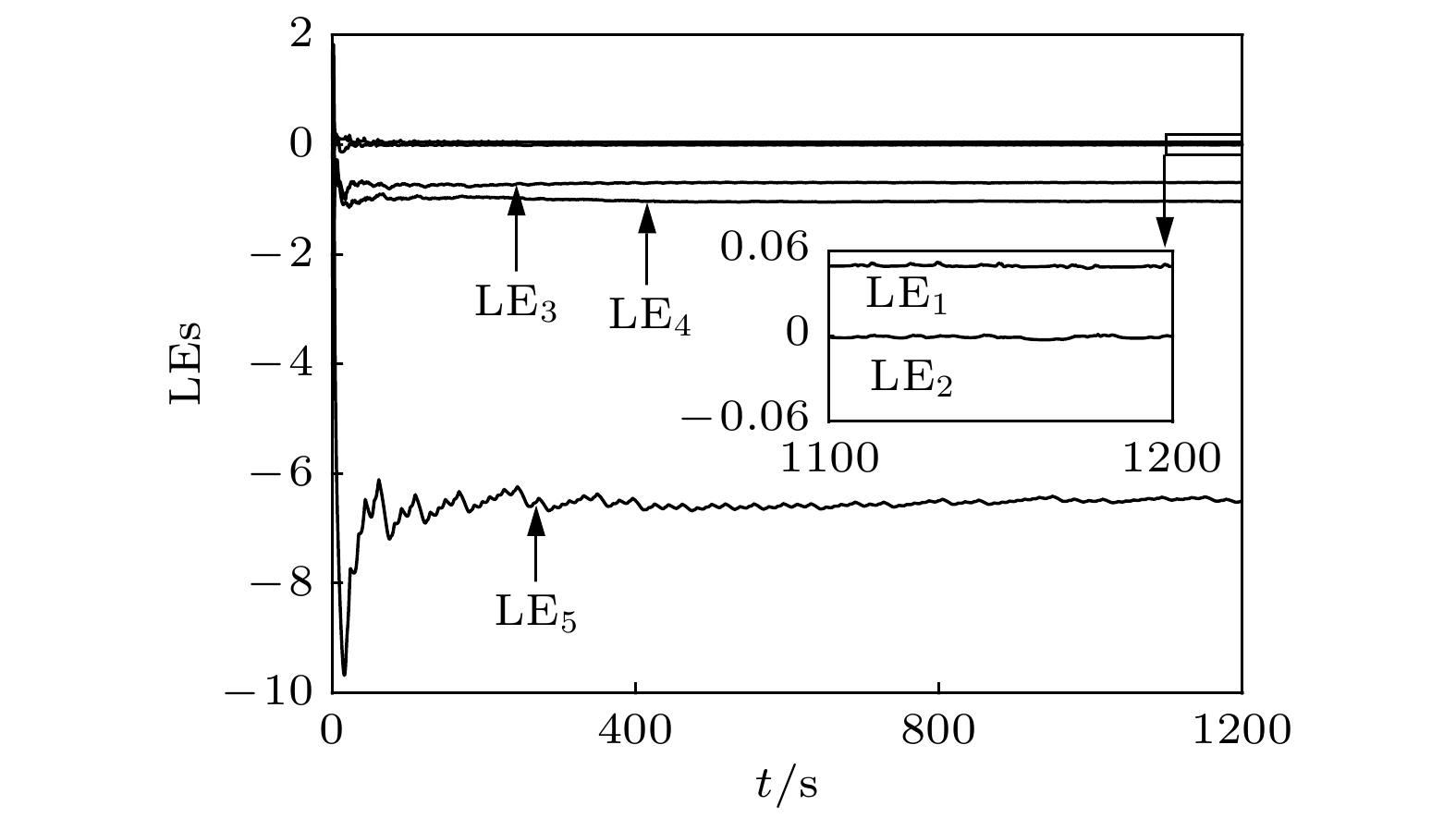
图 6 耦合强度$k$变化时分岔图和李雅普诺夫指数 (a)耦合强度$k$变化时分岔图; (b)耦合强度$k$变化时李雅普诺夫指数
Fig. 6. Bifurcation diagram and Lyapunov exponents with the coupling strength $k$ changing: (a) Bifurcation diagram with the coupling strength $k$ changing; (b) Lyapunov exponents with the coupling strength $k$ changing.
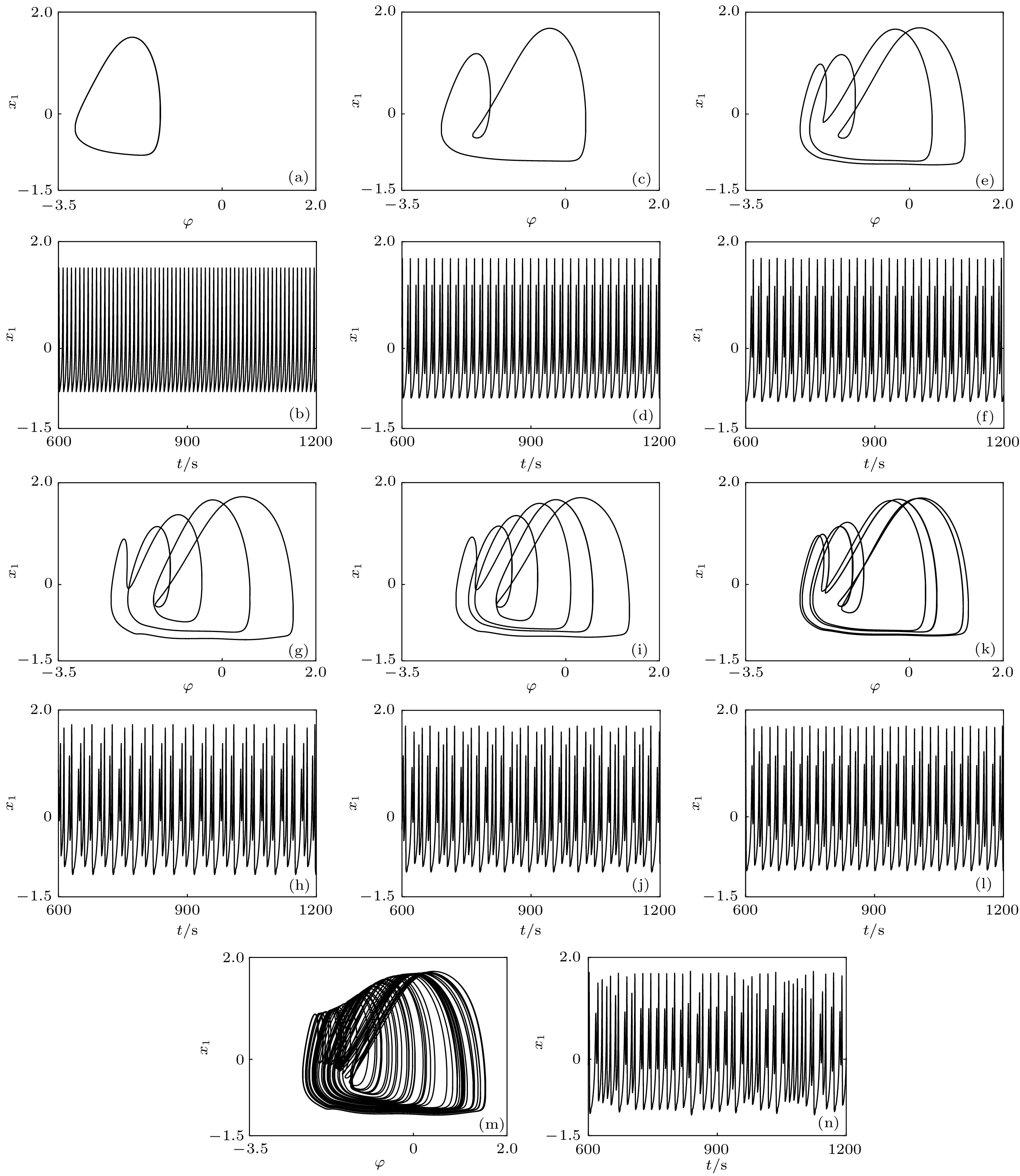
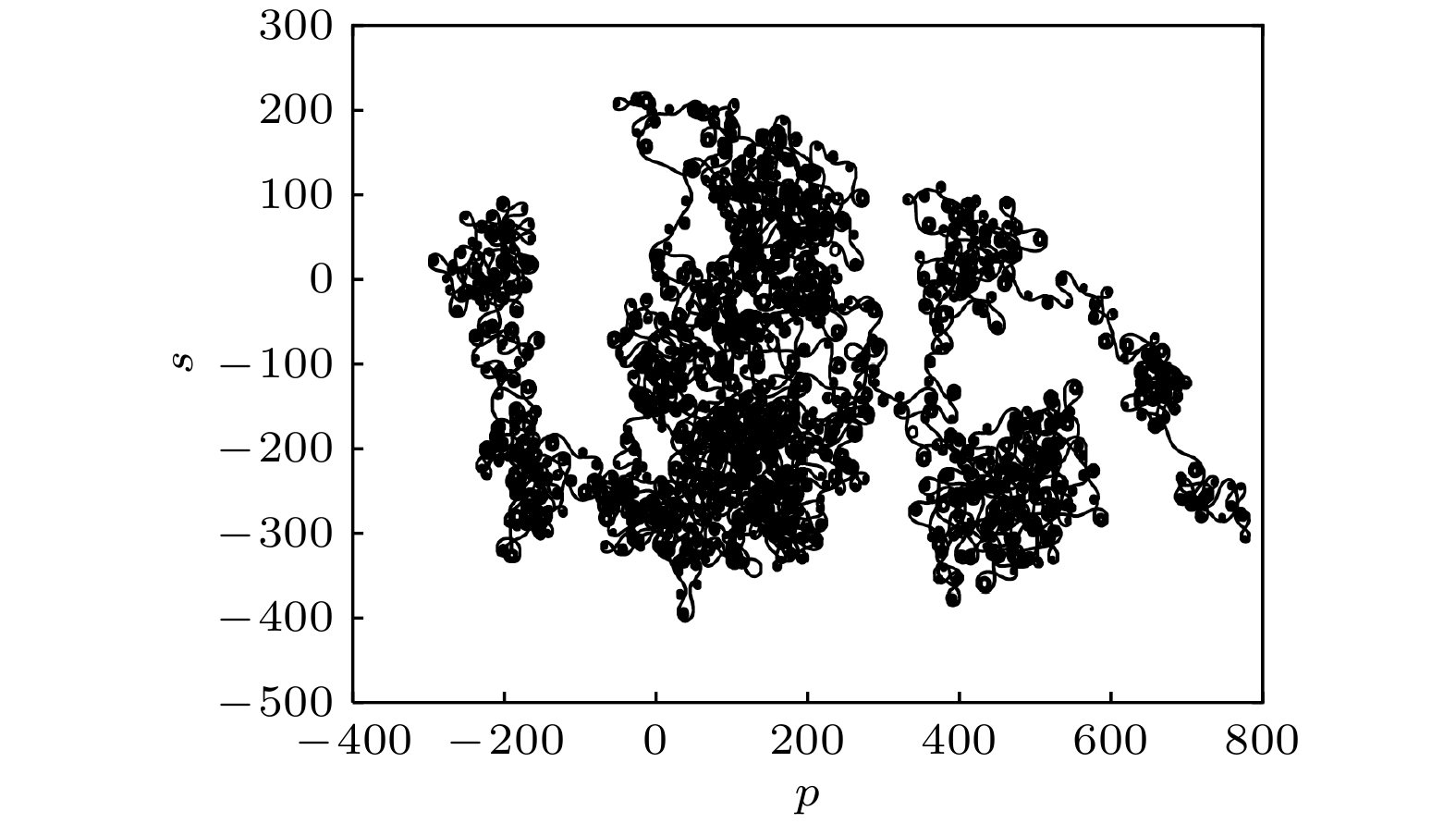
图 7 不同耦合强度$k$, 尖峰放电模式的相图及时域波形图
Fig. 7. Phase diagrams and time domain waveform diagrams of spiking firing modes, with different coupling strengths $k$.
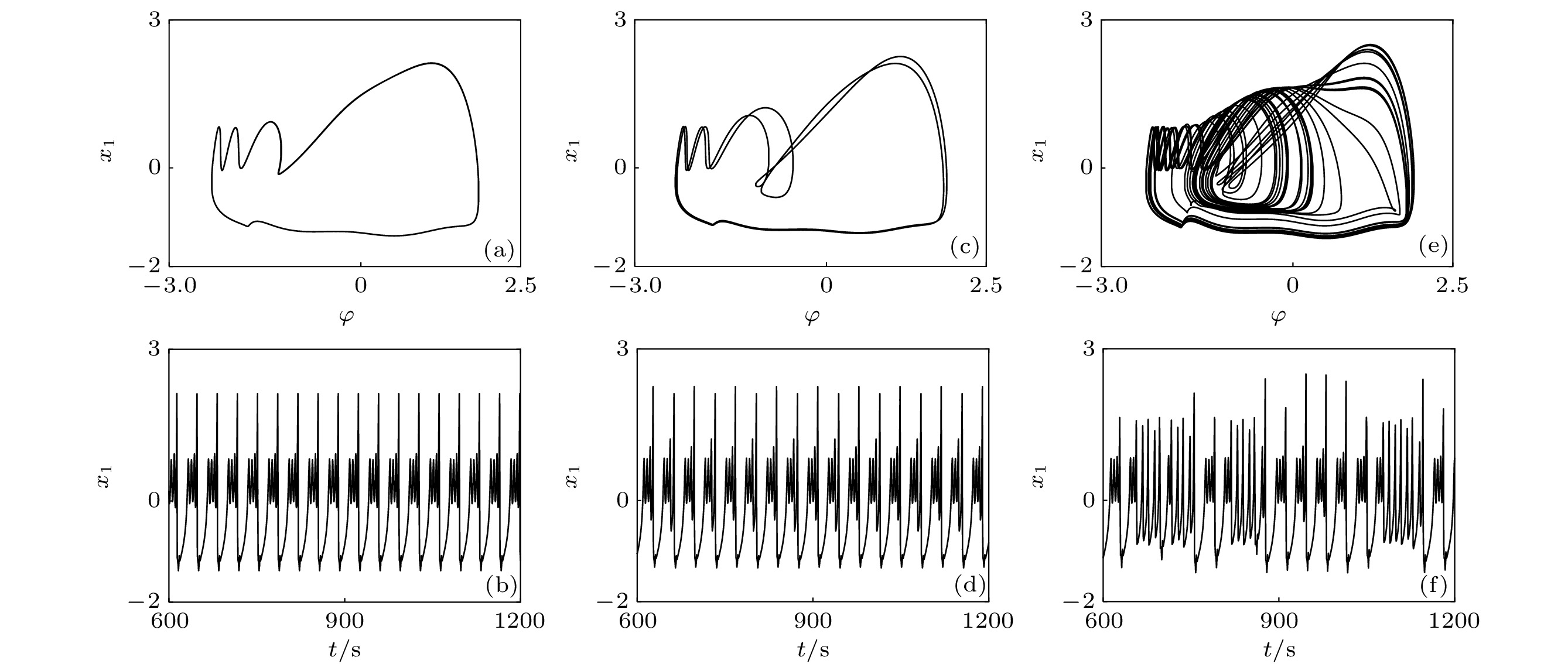
图 8 不同耦合强度$k$, 簇发放电模式的相图及时域波形图
Fig. 8. Phase diagrams and domain waveform diagrams of bursting firing modes, with different coupling strengths $k$.
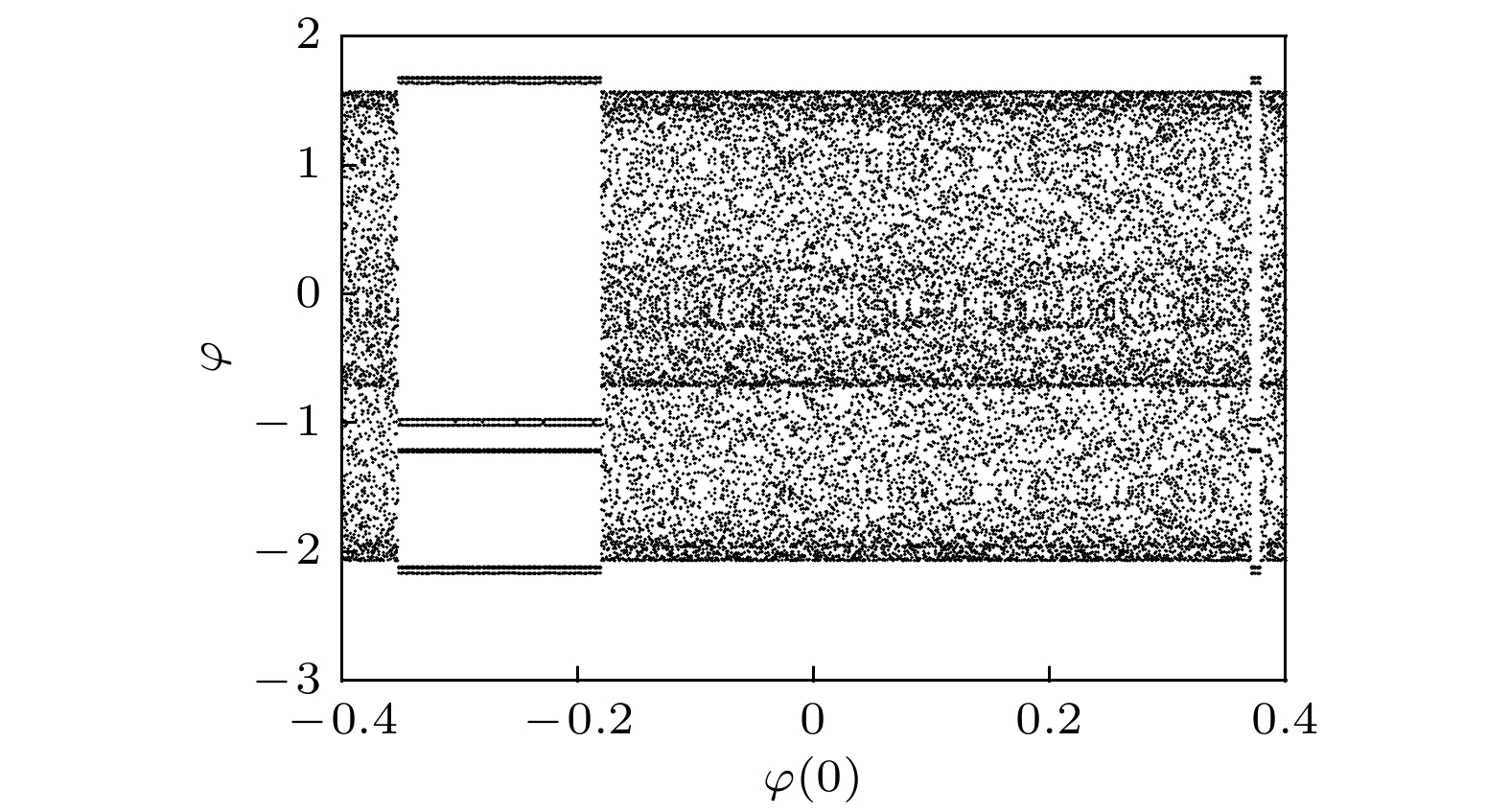
图 9 初始状态$\varphi \left( 0 \right)$变化时分岔图, $\varphi \left( 0 \right) \in \left[ { - 0.4, 0.4} \right]$
Fig. 9. Bifurcation diagram with the initial state $\varphi \left( 0 \right)$ changing, $\varphi \left( 0 \right) \in \left[ { - 0.4, 0.4} \right]$.
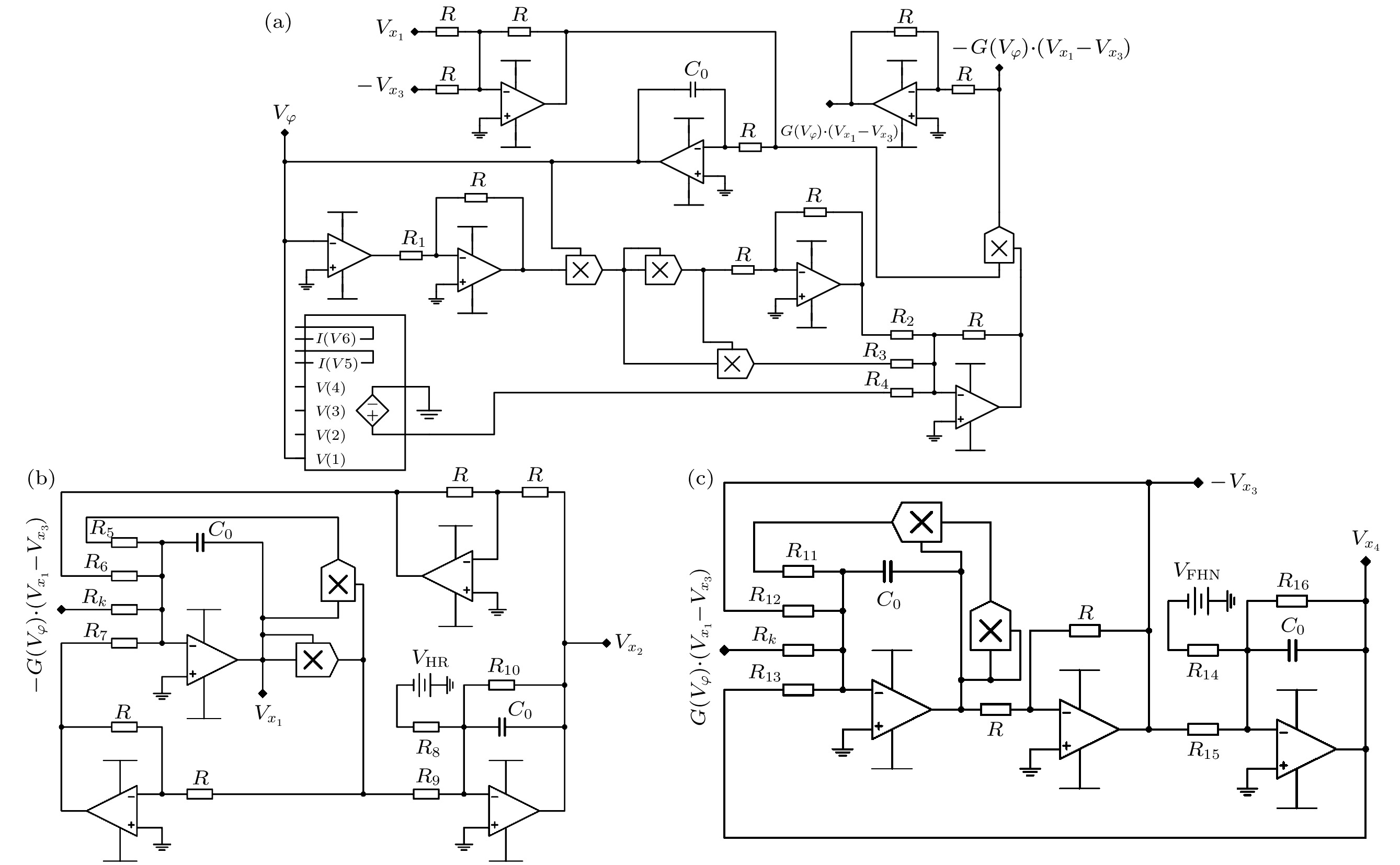
图 12 电路实现 (a) 新型局部有源忆阻器的电路实现; (b) HR神经元的电路实现; (c) FHN神经元的电路实现
Fig. 12. Circuit implementations: (a) Circuit implementation of the novel locally active memristor; (b) circuit implementation of the HR neuron; (c) circuit implementation of the FHN neuron.
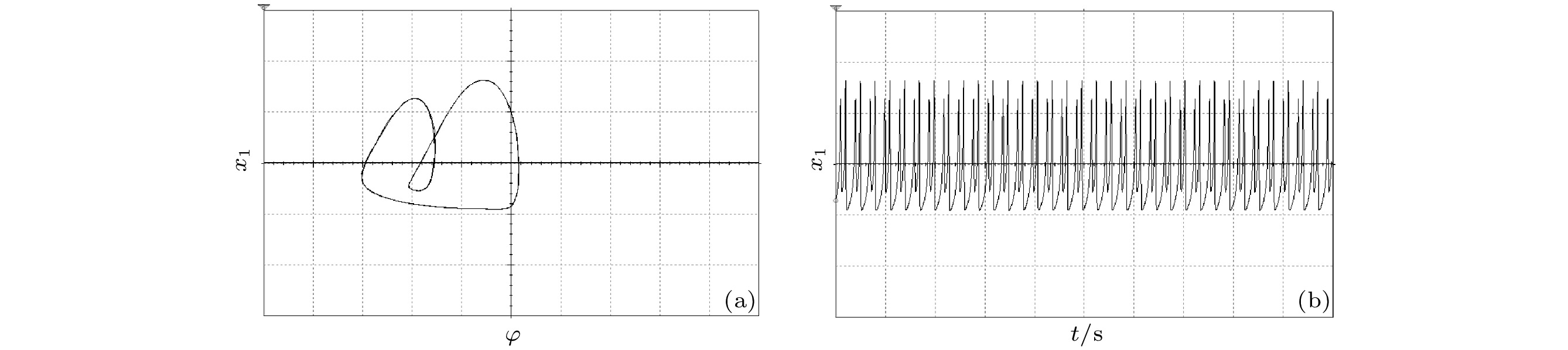
图 13 电路实现的相图及时域波形图(周期2尖峰放电模式) (a) 相图; (b) 时域波形图
Fig. 13. Phase diagram and time domain waveform diagram of circuit implementation (period-2 spiking firing mode): (a) Phase diagram; (b) time domain waveform.
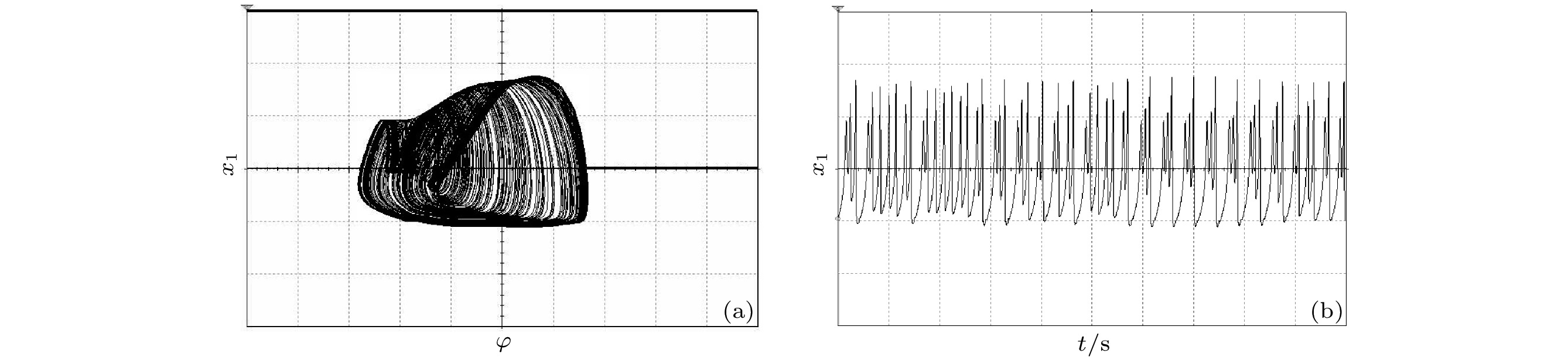
图 14 电路实现的相图及时域波形图(混沌尖峰放电模式) (a)相图; (b)时域波形图
Fig. 14. Phase diagram and time domain waveform diagram of circuit implementation (chaotic spiking firing mode): (a) Phase diagram; (b) time domain waveform.
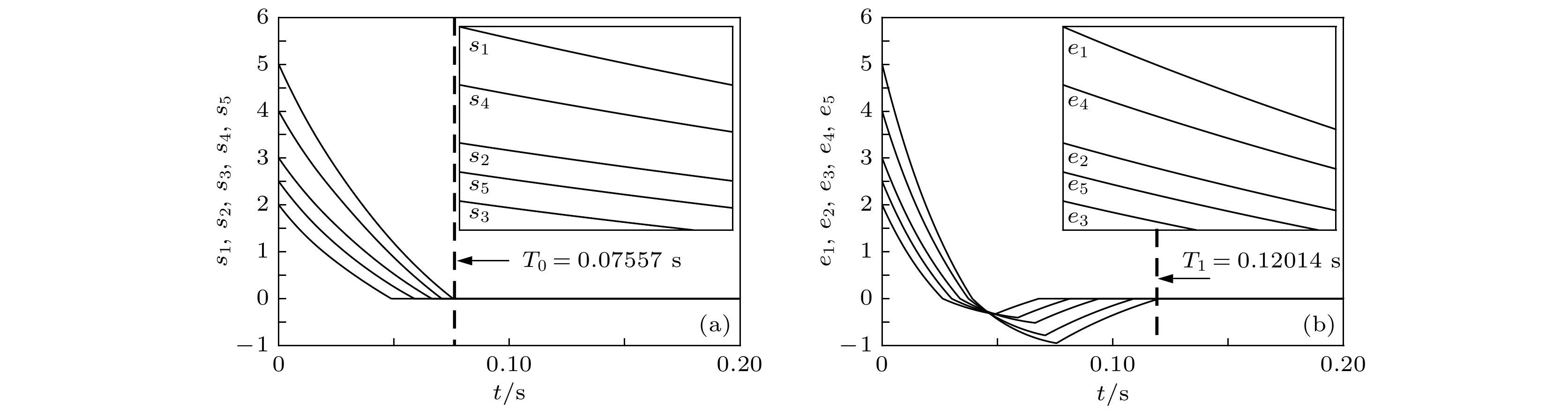
图 15 有限时间同步策略作用下滑模面与同步误差的响应曲线 (a)有限时间滑模面${s_1}$, ${s_2}$, ${s_3}$, ${s_4}$, ${s_5}$; (b)同步误差${e_1}$, ${e_2}$, ${e_3}$, ${e_4}$, ${e_5}$
Fig. 15. Response curves of sliding mode surfaces and synchronization errors when the finite-time synchronization strategy acts: (a) Finite-time sliding mode surfaces ${s_1}$, ${s_2}$, ${s_3}$, ${s_4}$, ${s_5}$; (b) synchronization errors ${e_1}$, ${e_2}$, ${e_3}$, ${e_4}$, ${e_5}$.
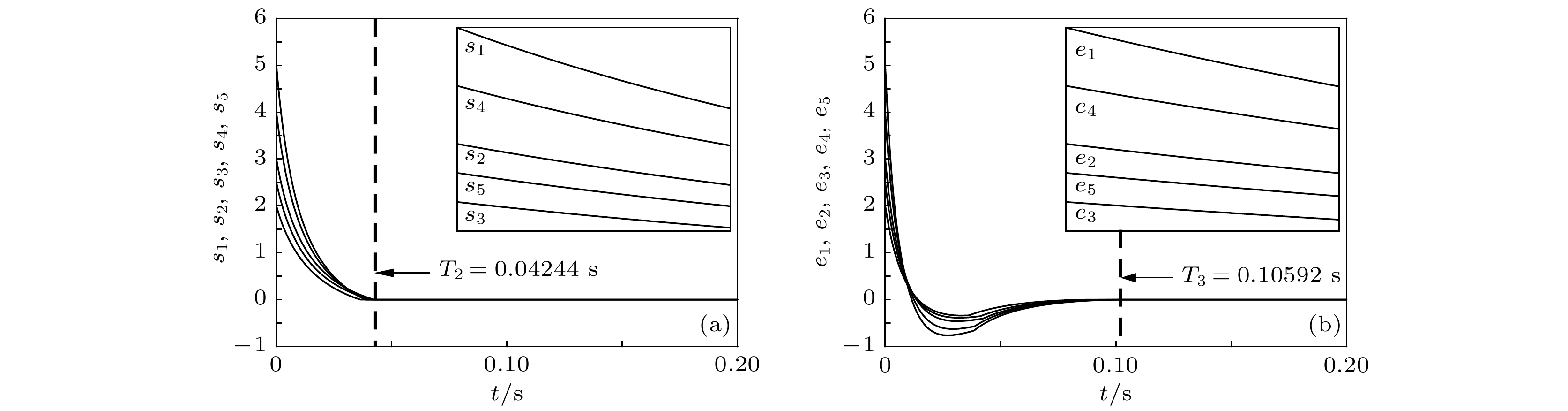
图 16 固定时间同步策略作用下滑模面与同步误差的响应曲线 (a) 固定时间滑模面${s_1}$, ${s_2}$, ${s_3}$, ${s_4}$, ${s_5}$; (b) 同步误差${e_1}$, ${e_2}$, ${e_3}$, ${e_4}$, ${e_5}$
Fig. 16. Response curves of sliding mode surfaces and synchronization errors when the fixed-time synchronization strategy acts: (a) Fixed-time sliding mode surfaces ${s_1}$, ${s_2}$, ${s_3}$, ${s_4}$, ${s_5}$; (b) synchronization errors ${e_1}$, ${e_2}$, ${e_3}$, ${e_4}$, ${e_5}$.
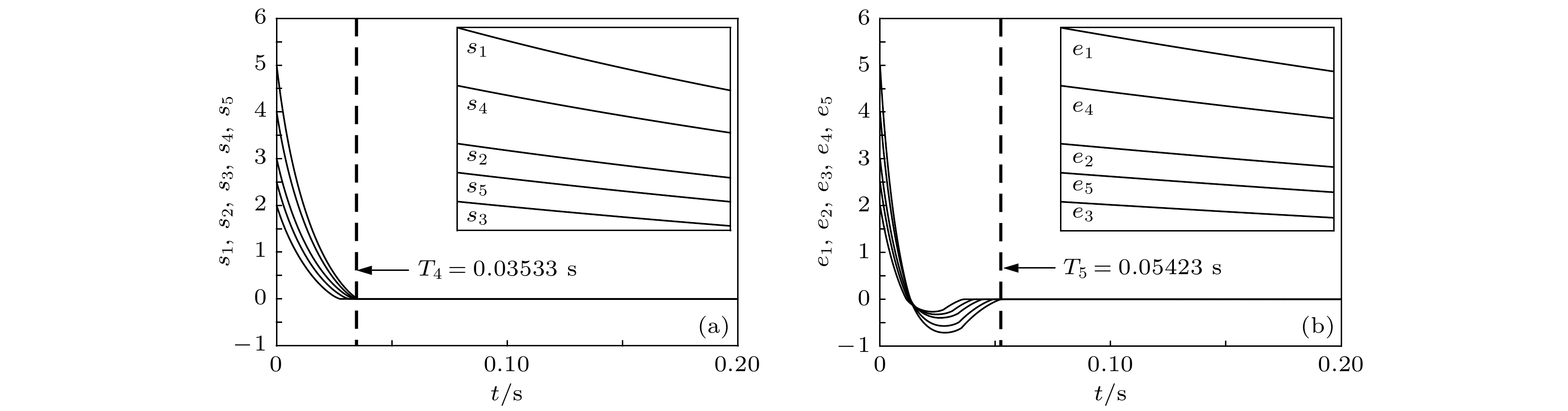
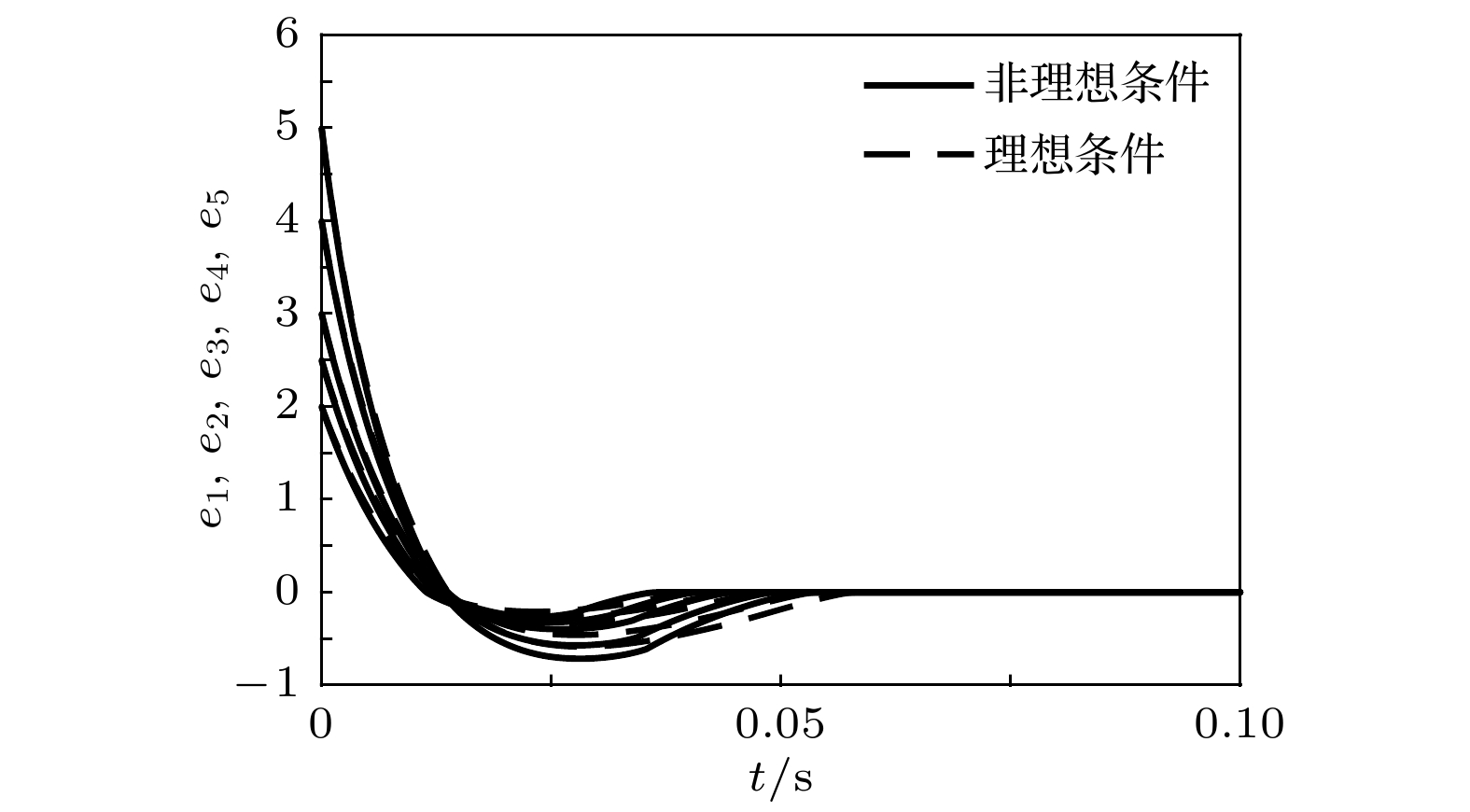
图 17 新型预定义时间同步策略作用下滑模面与同步误差的响应曲线 (a)新型预定义时间滑模面${s_1}$, ${s_2}$, ${s_3}$, ${s_4}$, ${s_5}$; (b)同步误差${e_1}$, ${e_2}$, ${e_3}$, ${e_4}$, ${e_5}$
Fig. 17. Response curves of sliding mode surfaces and synchronization errors when the novel predefined-time synchronization strategy acts: (a) Novel predefined-time sliding mode surfaces ${s_1}$, ${s_2}$, ${s_3}$, ${s_4}$, ${s_5}$; (b) synchronization errors ${e_1}$, ${e_2}$, ${e_3}$, ${e_4}$, ${e_5}$
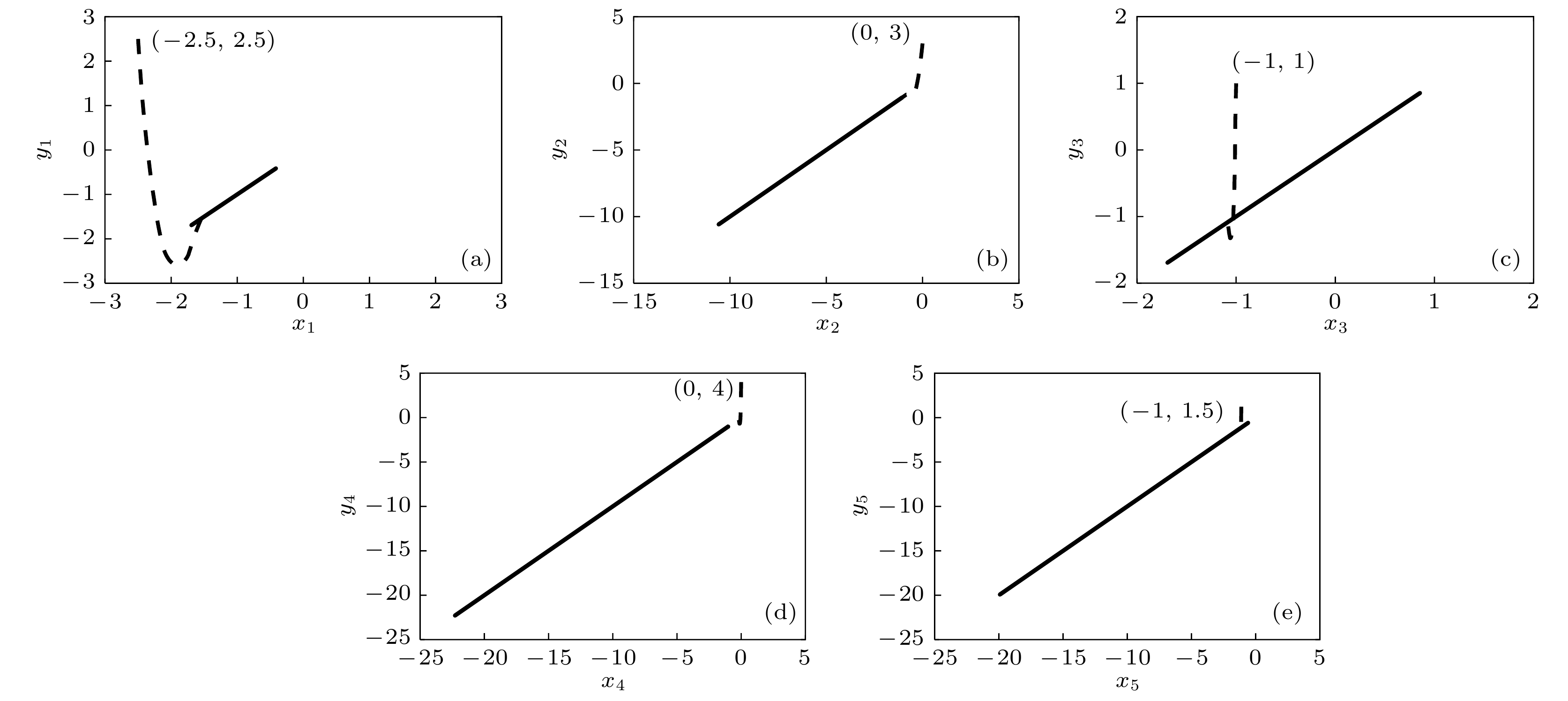
图 18 新型预定义时间同步策略作用下相图 (a) $ \left( {{x_1}, {y_1}} \right) $; (b) $ \left( {{x_2}, {y_2}} \right) $; (c) $ \left( {{x_3}, {y_3}} \right) $; (d) $ \left( {{x_4}, {y_4}} \right) $; (e) $ \left( {{x_5}, {y_5}} \right) $
Fig. 18. Phase diagrams when the novel predefined-time synchronization strategy acts: (a) $ \left( {{x_1}, {y_1}} \right) $; (b) $ \left( {{x_2}, {y_2}} \right) $; (c) $ \left( {{x_3}, {y_3}} \right) $; (d) $ \left( {{x_4}, {y_4}} \right) $; (e) $ \left( {{x_5}, {y_5}} \right) $.
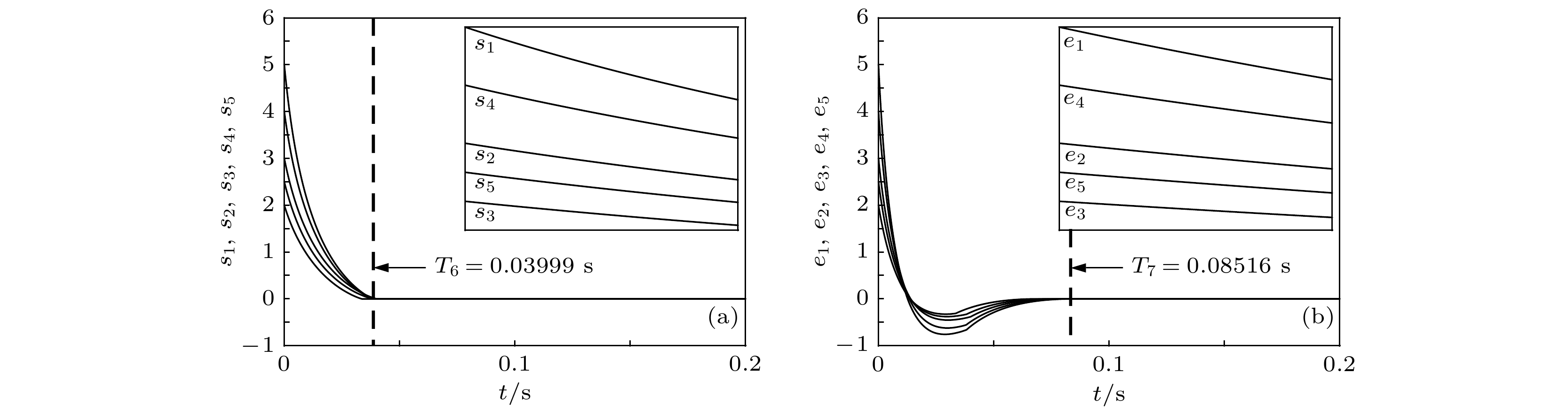
图 19 传统预定义时间同步策略作用下滑模面与同步误差的响应曲线 (a)传统预定义时间滑模面${s_1}, {s_2}, {s_3}, {s_4}, {s_5}$; (b)同步误差${e_1}, {e_2}, {e_3}, {e_4}, {e_5}$
Fig. 19. Response curves of sliding mode surfaces and synchronization errors when the traditional predefined-time synchronization strategy acts: (a) Traditional predefined-time sliding mode surfaces ${s_1}, {s_2}, {s_3}, {s_4}, {s_5}$; (b) synchronization errors ${e_1}, {e_2}, {e_3}, {e_4}, {e_5}$.
表 2 新型忆阻耦合异质神经元的电路参数
Table 2. Circuit parameters of the novel memristor-coupled heterogeneous neuron.
电路参数 类型 值 $R$, ${R_5}$, ${R_6}$, ${R_8}$,
${R_{10}}$, ${R_{14}}$, ${R_{16}}$电阻/kΩ $200$ ${R_1}$ 电阻/kΩ $ 2700 $ ${R_2}$ 电阻/kΩ $ 33.333 $ ${R_3}$, ${R_9}$, ${R_{15}}$ 电阻/kΩ $ 40 $ ${R_4}$ 电阻/kΩ $ 100 $ ${R_7}$ 电阻/kΩ $66.667$ ${R_{11}}$ 电阻/kΩ $ 3000 $ ${R_{12}}$, ${R_{13}}$ 电阻/kΩ $ 1000 $ ${R_k}$ 电阻/kΩ $ {{200} \mathord{\left/ {\vphantom {{200} k}} \right. } k} $ ${C_0}$ 电容/nF $40$ ${V_{{\text{HR}}}}$, ${V_{{\text{FHN}}}}$ 直流电压源/V $ 1 $  下载: 导出CSV
下载: 导出CSV
-
[1] Pecora L M, Carroll T L 1990 Phys. Rev. Lett. 64 821
Google Scholar
[2] Syed Ali M, Stamov G, Stamova I, Ibrahim T F, Dawood A A, Osman Birkea F M 2023 Mathematics 11 4248
Google Scholar
[3] Zhang J R, Lu J G, Jin X C, Yang X Y 2023 Neural Networks 167 680
Google Scholar
[4] Wu X, Liu S T, Wang H Y, Wang Y 2023 ISA Trans. 136 114
Google Scholar
[5] Ping J, Zhu S, Shi M X, Wu S M, Shen M Q, Liu X Y, Wen S P 2023 IEEE Trans. Netw. Sci. Eng. 10 3609
Google Scholar
[6] Beyhan S 2024 Chaos Soliton. Fract. 180 114578
Google Scholar
[7] Shi P, Li X, Zhang Y Q, Yan J J 2023 IEEE Trans. Circuits Syst. I-Regul. Pap. 70 1381
Google Scholar
[8] Chen Q, Li B, Yin W, Jiang X W, Chen X Y 2023 Chaos Soliton. Fract. 171 113440
Google Scholar
[9] Zhao N N, Qiao Y H, Miao J, Duan L J 2024 IEEE Trans. Fuzzy Syst. 32 1978
Google Scholar
[10] Zhang Y L, Yang L Q, Kou K I, Liu Y 2023 Neural Networks 165 274
Google Scholar
[11] Wang S S, Jian J G 2023 Chaos Soliton. Fract. 174 113790
Google Scholar
[12] Zhou X H, Cao J D, Wang X 2023 Neural Networks 160 97
Google Scholar
[13] Mahemuti R, Abdurahman A 2023 Mathematics 11 1291
Google Scholar
[14] Chakraborty A, Veeresha P 2024 Chaos Soliton. Fract. 182 114810
Google Scholar
[15] Yu F, Kong X X, Yao W, Zhang J, Cai S, Lin H R, Jin J 2024 Chaos Soliton. Fract. 179 114440
Google Scholar
[16] Sun W, Li B W, Wu A L, Guo W L, Wu X Q 2023 IEEE T. Cybern. 53 6277
Google Scholar
[17] Ding D, Tang Z, Park J H, Wang Y, Ji Z C 2023 IEEE T. Cybern. 53 887
Google Scholar
[18] Surendar R, Muthtamilselvan M, Ahn K 2024 Chaos Soliton. Fract. 181 114659
Google Scholar
[19] Saeed N A, Saleh H A, El-Ganaini W A, Awrejcewicz J, Mahmoud H A 2024 Chin. J. Phys. 88 311
Google Scholar
[20] Ji X Y, Dong Z K, Han Y F, Lai C S, Zhou G D, Qi D L 2023 IEEE Trans. Consum. Electron. 69 1005
Google Scholar
[21] Dong Z K, Ji X Y, Lai C S, Qi D L, Zhou G D, Lai L L 2023 IEEE Consum. Electron. Mag. 12 94
Google Scholar
[22] Liu J Y, Xiong F E, Zhou Y, Duan S K, Hu X F 2024 IEEE Trans. Cogn. Dev. Syst. 16 794
Google Scholar
[23] Lei Z Y, Yang J C, Qiu H S, Zhang X Z, Liu J Z 2024 Electronics 13 2229
Google Scholar
[24] Jin P P, Wang G Y, Liang Y, Iu H H C, Chua L O 2021 IEEE Trans. Circuits Syst. I-Regul. Pap. 68 4419
Google Scholar
[25] Kuwahara T, Oshio R, Kimura M, Zhang R Y, Nakashima Y 2024 Neurocomputing 593 127792
Google Scholar
[26] Mannan Z I, Adhikari S P, Yang C J, Budhathoki R K, Kim H, Chua L 2019 IEEE Trans. Neural Netw. Learn. Syst. 30 3458
Google Scholar
[27] Chua L O 2005 Int. J. Bifurcat. Chaos 15 3435
Google Scholar
[28] Chua L O 2014 Semicond. Sci. Technol. 29 104001
Google Scholar
[29] Yan S H, Zhang Y Y, Ren Y, Sun X, Cui Y, Li L 2023 Nonlinear Dynam. 111 17547
Google Scholar
[30] Huang L L, Wang S T, Lei T F, Huang K Y, Li C B 2024 Int. J. Bifurcat. Chaos 34 2450022
Google Scholar
[31] Li C L, Wang X, Du J R, Li Z J 2023 Nonlinear Dynam. 111 21333
Google Scholar
[32] Wang M J, Peng J W, He S B, Zhang X, Iu H H C 2023 Fractal Fract. 7 818
Google Scholar
[33] Zhang S H, Zhang H L, Lin H R, Wang C 2024 Nonlinear Dynam. 112 12411
Google Scholar
[34] Jia J, Wang F, Zeng Z G 2022 Neurocomputing 505 413
Google Scholar
[35] Guo Z H, Li Z J, Wang M J, Ma M L 2023 Chin. Phys. B 32 038701
Google Scholar
[36] Cao H B, Wang F Q 2021 IEEE Trans. Very Large Scale Integr. (VLSI) Syst. 29 617
Google Scholar
[37] Liu W, Wang F Q, Ma X K 2015 Int. J. Numer. Model. 28 335
Google Scholar
[38] Xu B, Zou S T, Bai L B, Chen K, Zhao J 2024 Nonlinear Dynam. 112 1395
Google Scholar
[39] Chua L O 2018 Appl. Phys. A-Mater. Sci. Process. 124 563
Google Scholar
[40] Dong Y J, Wang G Y, Chen G R, Shen Y R, Ying J J 2020 Commun. Nonlinear Sci. Numer. Simul. 84 105203
Google Scholar
[41] Lin H R, Wang C H, Deng Q L, Xu C, Deng Z K, Zhou C 2021 Nonlinear Dynam. 106 959
Google Scholar
[42] Wei Z C 2011 Phys. Lett. A 376 102
Google Scholar
[43] 包涵, 包伯成, 林毅, 王将, 武花干 2016 物理学报 65 180501
Google Scholar
Bao H, Bao B C, Lin Y, Wang J, Wu H G 2016 Acta Phys. Sin. 65 180501
Google Scholar
[44] Gottwald G A, Melbourne I 2009 SIAM J. Appl. Dyn. Syst. 8 129
Google Scholar
[45] Bhat S P, Bernstein D S 2000 SIAM J. Control Optim. 38 751
Google Scholar
[46] Polyakov A 2012 IEEE Trans. Autom. Control 57 2106
Google Scholar
[47] Sánchez-Torres J D, Gómez-Gutiérrez D, López E, Loukianov A G 2018 IMA J. Math. Control Inf. 35 i1
Google Scholar
[48] Wongvanich N, Roongmuanpha N, Tangsrirat W 2023 IEEE Access 11 88388
Google Scholar
[49] Kang X Y, Chai L, Liu H K 2023 Int. J. Control Autom. Syst. 21 1210
Google Scholar
[50] Ni J K, Liu C X, Liu K, Liu L 2014 Chin. Phys. B 23 100504
Google Scholar
[51] Shirkavand M, Pourgholi M 2018 Chaos Soliton. Fract. 113 135
Google Scholar
[52] Han S 2023 J. Mar. Sci. Eng. 11 2191
Google Scholar

 下载:
下载:
计量
- 文章访问数: 4608
- PDF下载量: 140
- 被引次数: 0
