










-
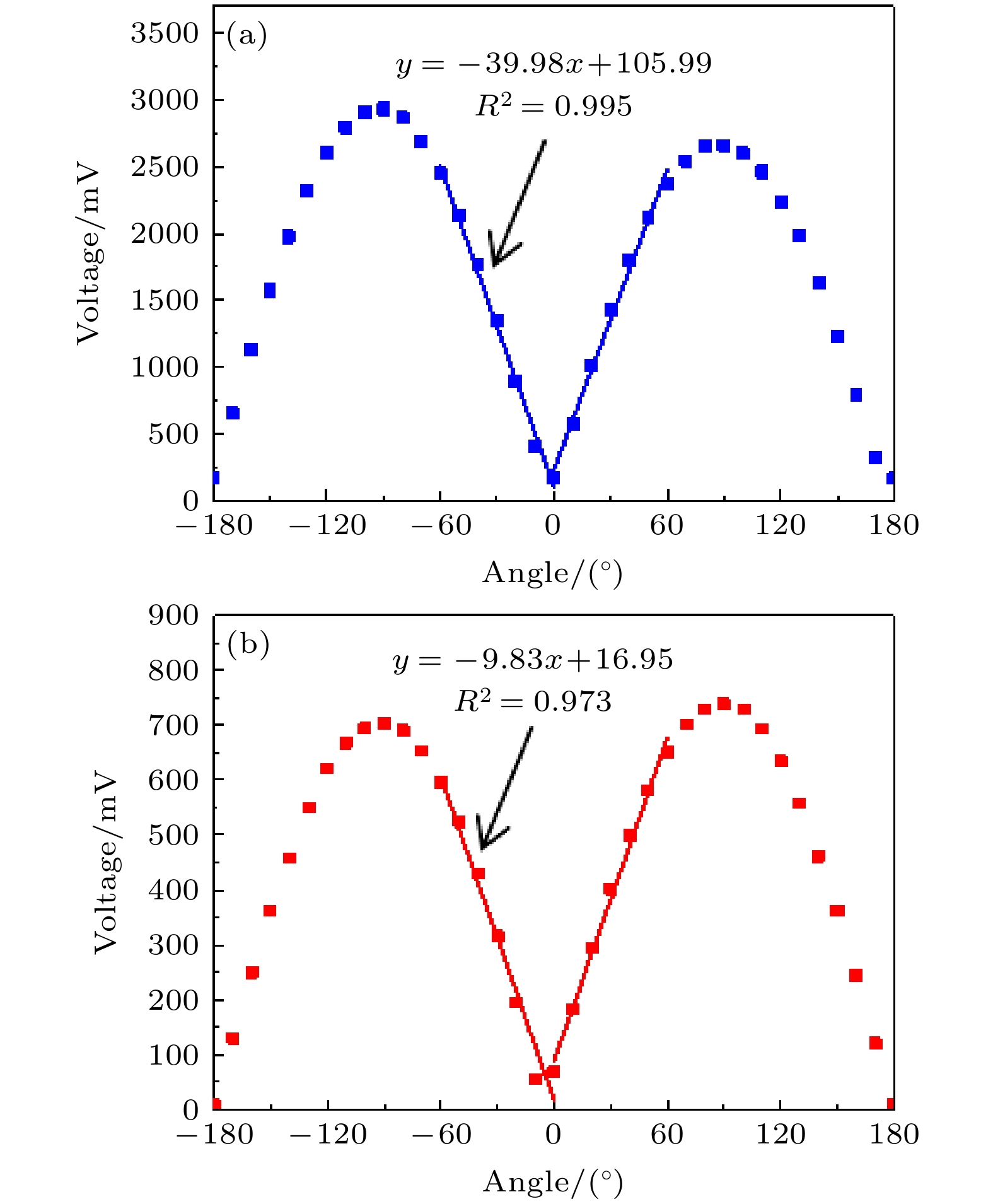
仿蝇耳声传感器是一种对声压梯度敏感的指向性微型麦克风. 本文设计制备了桥连耦合双翼形硅基微电子机械系统仿蝇耳振膜, 利用该振膜制作了光纤Fabry-Pérot干涉式麦克风, 并对这种麦克风的特性进行了理论与实验研究. 仿真结果指出: 这种仿生振膜具有摇摆和弯曲两种振动模态, 单位声压下摇摆模态的振幅依赖于入射声波的频率与传播方向, 频率越接近摇摆模态本征值, 振幅越大; 摇摆模态振幅随传播方向在三维空间的变化呈纺锤形分布, 纺锤的长轴平行于振膜的长轴, 意味着传播方向平行于振膜长轴时麦克风灵敏度最高. 实验测得的光纤仿生麦克风的摇摆模态本征频率略小于仿真值, 其输出信号振幅随声源水平方位角的变化呈“8”字形分布, 在0°—± 60°方位角范围二者呈线性关系, 由此得出麦克风的方向灵敏度为39.98 mV/(°).
-
关键词:
- 硅基微电子机械系统仿生振膜 /
- 光纤麦克风 /
- 摇摆模态 /
- 声源定位
The bionic sound detector based on the principle of the Ormia ochracea fly’s coupled ears is a miniature directional microphone that is sensitive to the sound pressure gradient. In this work, a silicon micro-electro-mechanical system bionic diaphragm consisting of two interconnected wings is designed and prepared, and a fiber-optic Fabry-Pérot interferometric microphone is constructed using the bionic diaphragm, and the characteristics of this microphone are studied theoretically and experimentally. According to the simulation results, the bionic diaphragm has two vibration modes of rocking and bending, and the rocking-mode displacement amplitude at a given sound pressure depends on the frequency and the propagation direction of the incident sound wave, and the closer to the eigenfrequency of the rocking mode the sound frequency, the greater the amplitude is; the rocking-mode displacement amplitude changes with the propagation direction in the three-dimensional space, resulting in a spindle-shaped distribution, and the long axis of the spindle is parallel to the long axis of the diaphragm, implying that the microphone is most sensitive to the sound wave propagating along the long axis of the diaphragm. The rocking-mode resonance frequency of the fiber-optic bionic microphone is measured to be slightly smaller than the simulated value. The output signal amplitude of the microphone changes with the horizontal azimuth angle of the sound source, producing a figure-8 polar pattern. A linear relationship between the microphone response and the azimuth angle is obtained in a range of 0° – ±60°, and in this angle range the directional sensitivity of the microphone is 39.98 mV/(°).-
Keywords:
- bionic silicon-based micro-electro-mechanical system diaphragm /
- fiber-optic microphone /
- rocking mode /
- sound source localization
[1] Wild G, Hinckley S 2008 IEEE Sens. J. 8 1184
 Google Scholar
Google Scholar
[2] Wu G M, Xiong L S, Dong Z F, Liu X, Cai C, Qi Z M 2021 J. Appl. Phys. 129 164504
Google Scholar
[3] Tuma J, Janecka P, Vala M, Richter L 2012 International Carpathian Control Conference Grand Hotel Permon, High Tatras, Slovakia, May 28, 2012 p740
[4] Zhu J X, Ren L, Ho S C, Jia Z G, Song G B 2017 Smart Mater. Struct. 26 025022
Google Scholar
[5] Chang X Y, Yang C Q, Shi X F, Li P F, Shi Z G, Chen J M 2018 IEEE 87 th Vehicular Technology Conference (VTC Spring) Porto, Portugal, June 3–6, 2018 p1
[6] Yang C Q, Wu Z X, Chang X Y, Shi X F, Wo J F, Shi Z G 2018 IEEE 10th Sensor Array and Multichannel Signal Processing Workshop (SAM) Sheffield, Britain, July 8–11, 2018 p587
[7] Miles R N, Robert D, Hoy R R 1995 J. Acoust. Soc. Am. 98 3059
Google Scholar
[8] Ishfaque A, Kim B 2016 Sens. Actuators A 250 60
Google Scholar
[9] Miles R N, Cui W, Su Q T, Homentcovschi D 2014 J. Microelectromech. Syst. 24 241
Google Scholar
[10] Touse M, Sinibaldi J, Simsek K, Catterlin J, Harrison S, Karunasiri G 2010 Appl. Phys. Lett. 96 173701
Google Scholar
[11] Touse M, Sinibaldi J, Karunasiri G 2010 IEEE SENSORS 2010 Waikoloa, USA, November 1–4, 2010 p2422
[12] Kuntzman M L, Gloria L J, Hewa-Kasakarage N N, Kim D, Hall N A 2013 Appl. Phys. Lett. 102 054109
Google Scholar
[13] Zhang Y S, Bauer R, Windmill J F, Uttamchandani D 2016 IEEE 29th International Conference on Micro Electro Mechanical Systems (MEMS) Shanghai, China, January 1, 2016 p1114
[14] Bauer R, Zhang Y S, Jackson J C, Whitmer W M, Windmill J 2016 IEEE Sensors Orlando, FL, USA, October 30–November 3, 2016 p1
[15] Bauer R, Zhang Y S, Jackson J C, Whitmer W M 2017 IEEE Sens. J. 17 5529
Google Scholar
[16] Zhang Y S, Bauer R, Jackson J C, Whitmer W M, Windmill J, Deepak U 2018 J. Microelectromech. Syst. 27 667
Google Scholar
[17] Cui W, Bicen B, Hall N, Jones S A, Degertekin F L, Miles R N 2006 19th IEEE International Conference on Micro Electro Mechanical Systems Istanbul, Turkey, January 22–26, 2006 p614
[18] Miles R N, Su Q, Cui W, Shetye M, Degertekin F, Bicen B, Garcia C, Jones S, Hall N 2009 J. Acoust. Soc. Am. 125 2013
Google Scholar
[19] Miles R N, Degertekin L, Cui W, Su Q, Fredrick B 2013 J. Acoust. Soc. Am. 133 3316
Google Scholar
[20] Liu H, Currano L, Gee D, Helms T, Miao Y 2013 Sci. Rep. 3 2489
Google Scholar
[21] 邵斌, 厉东, 张宇晖, 朱文辉, 王建军 2017 环境工程 35 598
Shao B, Li D, Zhang Y H, Zhu W H, Wang J J 2017 Environ. Eng. 35 598
[22] 何柞镛, 赵玉芳 1981 声学理论基础 (北京: 国防工业出版社) 第61—109页
He Z Y, Zhao Y F 1981 Basis of Acoustics Theory (Beijing: National Defense Industry Press) pp61–109 (in Chinese)
[23] 杜功焕, 朱哲民, 龚秀芬 2012 声学基础(第3版) (南京: 南京大学出版社) 第120, 121页
Du G H, Zhu Z M, Gong X F 2012 Acoustic Fundamentals (3rd Ed.) (Nanjing: Nanjing University Press) pp120, 121
[24] Dong Z F, Hu X Y, Ren D P, Xiong L S, Liu X, Deng X, Cai C, Qi Z M 2021 J. Lightwave Technol. 39 7008
Google Scholar
[25] Bucaro J A, Lagakos N, Houston B H, Jarzynski J, Zalalutdinov M 2005 J. Acoust. Soc. Am. 118 1406
Google Scholar
[26] Ren D P, Liu X, Zhang M Y, Gao R, Qi Z M 2021 IEEE Sens. J. 21 14655
Google Scholar
[27] Rahaman A, Kim B 2020 Sci. Rep. 10 1
Google Scholar
-
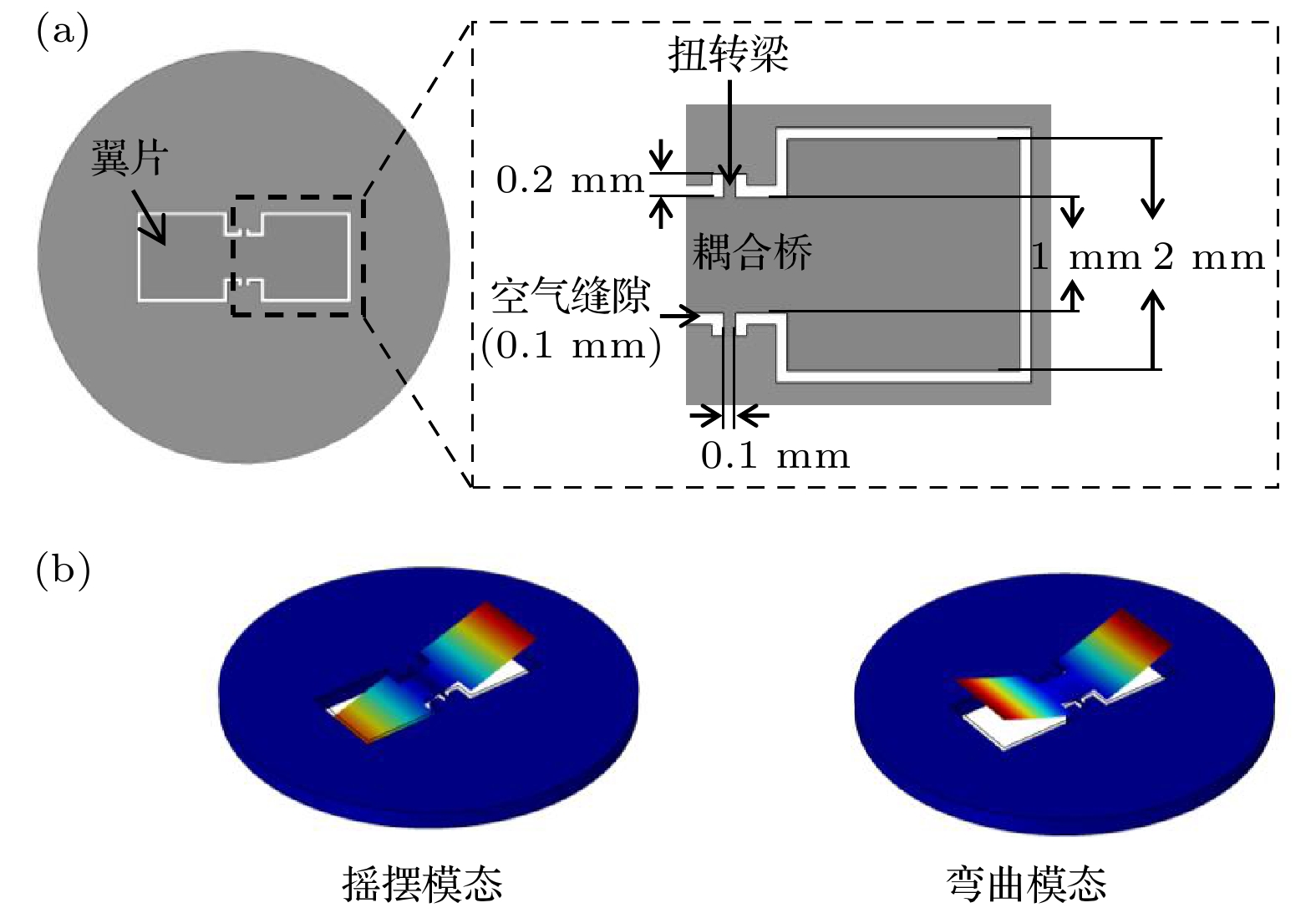
图 2 (a)硅基MEMS仿生振膜结构示意图; (b)摇摆模态和弯曲模态仿真结果
Fig. 2. Silicon MEMS bionic diaphragm: (a) Schematic diagram; (b) simulation results of the rocking and bending modes.
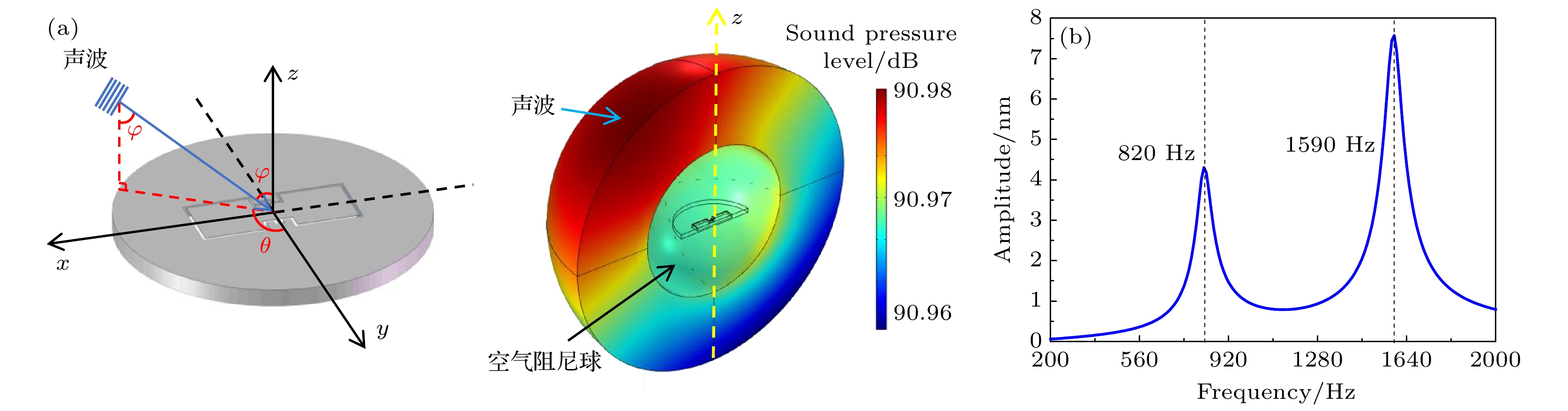
图 3 (a) 密闭背腔室硅基MEMS仿生振膜光纤麦克风的仿真模型; (b) 仿生光纤麦克风频率响应曲线(振幅是指图(a)所示振膜最远端的位移振幅)
Fig. 3. (a) Simulation model of the silicon MEMS bionic diaphragm based fiber-optic microphone with a closed back cavity; (b) simulation results of frequency response of the bionic fiber-optic microphone. Amplitude refers to the displacement amplitude at the farthest end of the diaphragm as shown in panel (a).

图 4 在摇摆模态谐振频率下, 仿生光纤麦克风的两监测点在二维空间的“8”字形方向响应仿真结果 (a)声源方位角在x-y平面内; (b)声源入射角在x-z平面内
Fig. 4. Simulation results of the “8” shaped directional response in two-dimensional space for the monitoring points of bionic fiber-optic microphone at rocking-mode resonant frequency: (a) The sound source azimuth angle in the x-y plane; (b) the sound source incidence angle in the x-z planes.
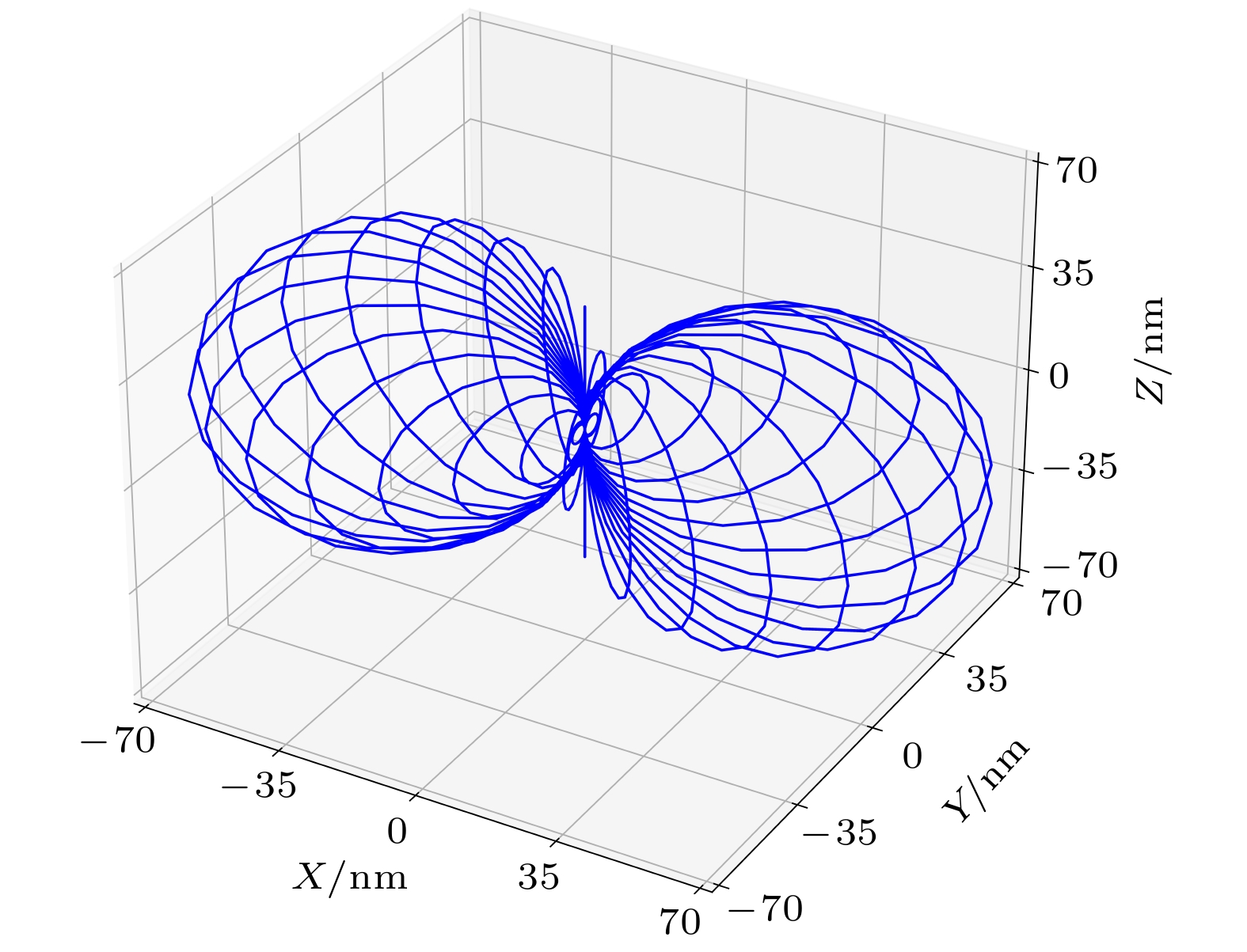
图 5 在摇摆模态谐振频率下, 仿生光纤麦克风在三维空间纺锤形方向响应的仿真结果
Fig. 5. Simulation results of the spindle-shaped directional response in 3-dimensional space for the bionic fiber-optic microphone at rocking-mode resonance frequency.

图 6 (a) 仿生光纤麦克风对不同频率平面声波的响应振幅随声源方位角的变化曲线; (b) 仿生光纤麦克风方向灵敏度随声波频率的变化曲线
Fig. 6. (a) Simulation results of angular dependence of the response amplitude of the bionic fiber-optic microphone to acoustic plane waves of different frequencies; (b) frequency dependence of the directional sensitivity of the bionic fiber-optic microphone.
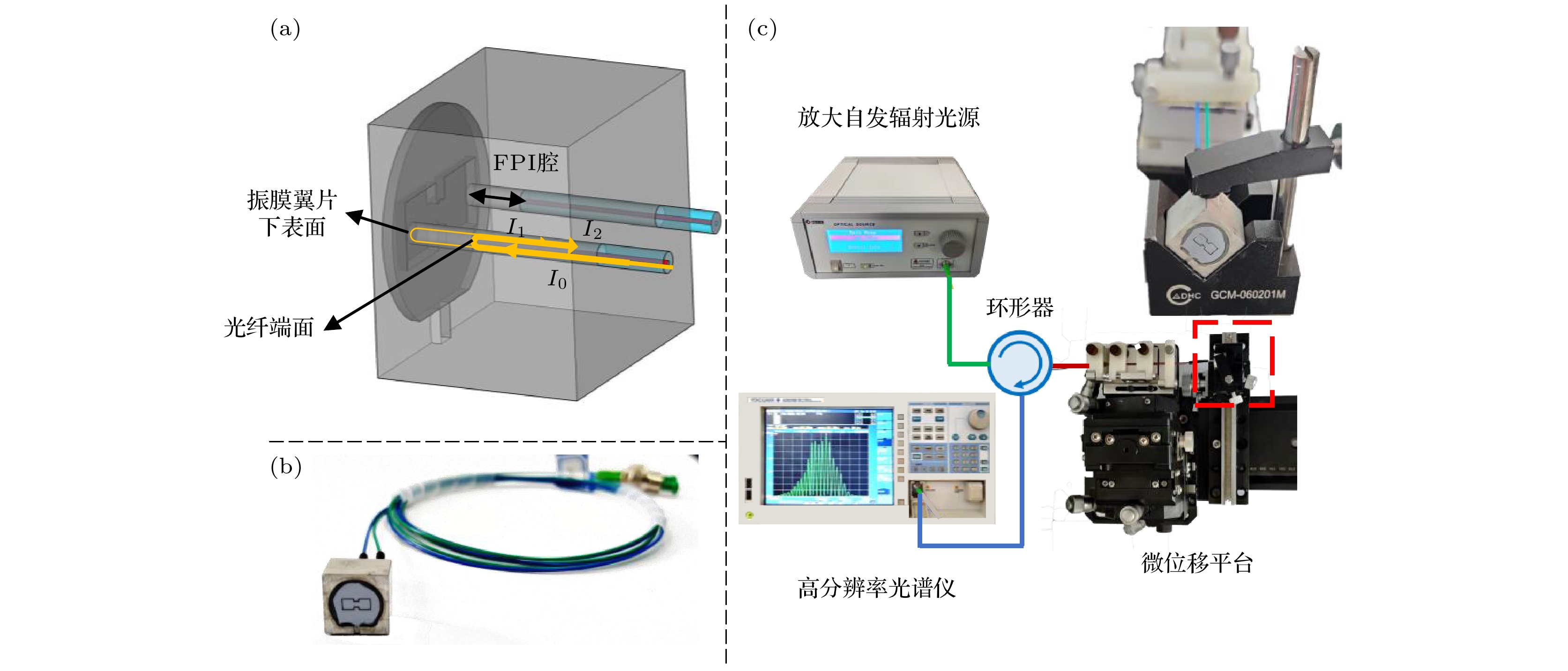
图 8 (a) 仿生光纤麦克风结构示意图(I, 光束的光强); (b) 仿生光纤麦克风实物照片; (c) 用于在麦克风组装过程中精确调控光纤FPI腔长的平台
Fig. 8. (a) Schematic diagram of the structure of bionic fiber-optic microphone (I, intensity of the beam); (b) photograph of the bionic fiber-optic microphone; (c) experimental setup used for precisely adjusting the FPI cavity length in the process of assembling the bionic fiber-optic microphone.
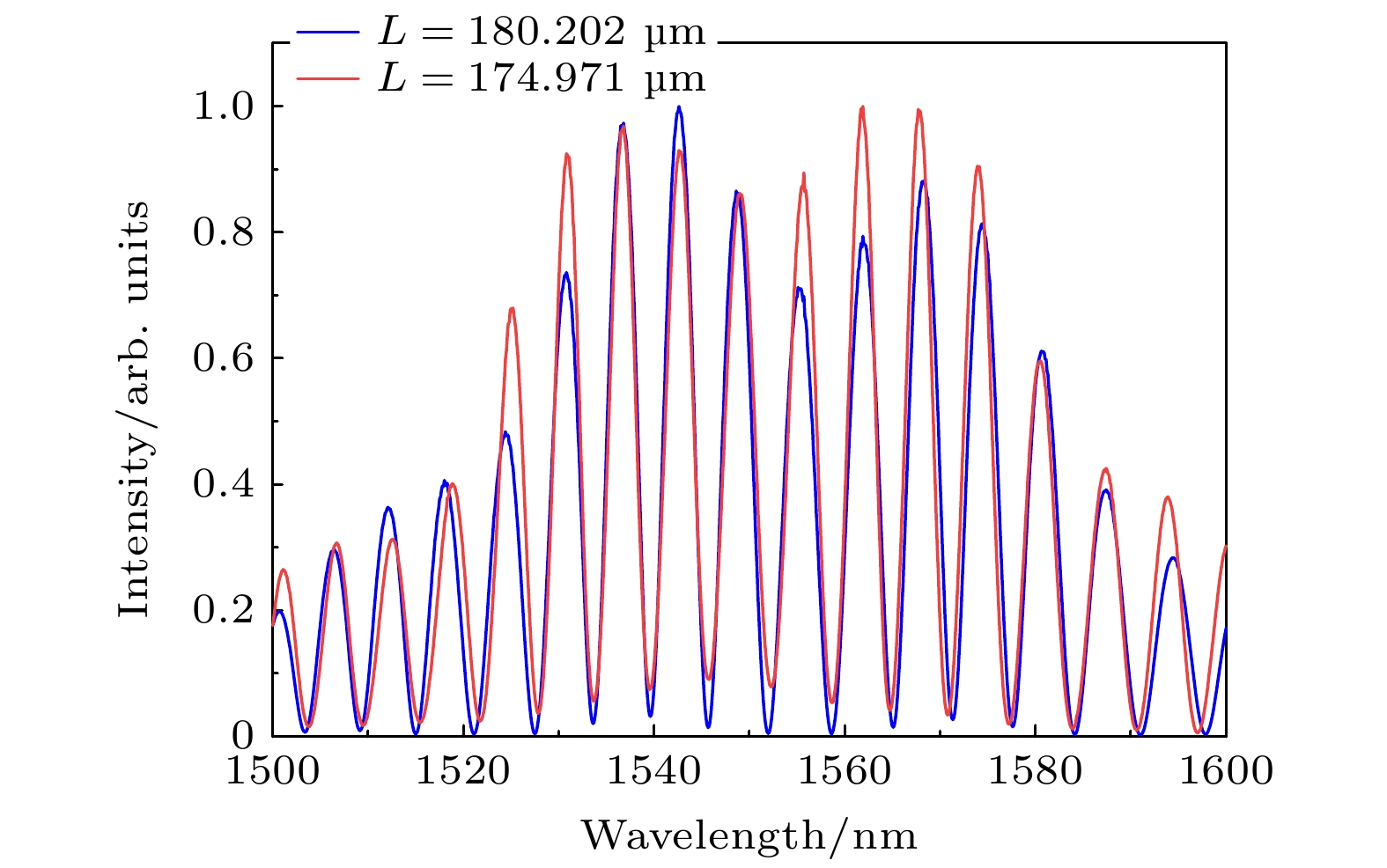
图 9 实验测得仿生光纤麦克风双通道干涉光谱图
Fig. 9. Spectral interference patterns measured from the two fiber-optic FPI channels of the bionic microphone.
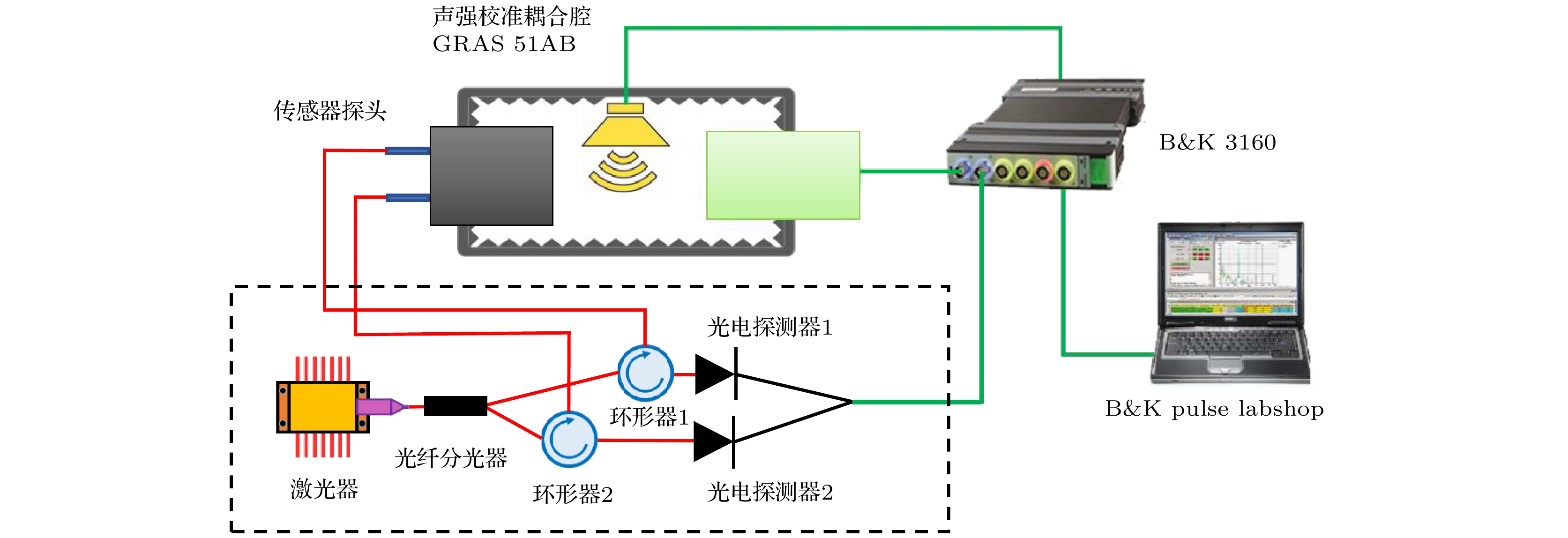
图 10 用于表征仿生光纤麦克风的声学测试系统示意图
Fig. 10. Schematic of the acoustic test system for characterizing bionic fiber-optic microphones.

图 11 实验测得的仿生光纤麦克风的双通道频响曲线
Fig. 11. Measured frequency response curves for the two fiber-optic FPI channels of the bionic microphone.

图 12 实验测得的仿生光纤麦克风对准垂直入射的单频声波的频域响应曲线, 插图为相应的时域响应曲线 (a) 声波频率688 Hz; (b) 声波频率693 Hz
Fig. 12. Frequency-domain response curves measured with the two fiber-optic FPI channels of the bionic microphone, and the insets show the corresponding time-domain response curves: (a) sound frequency of 688 Hz; (b) sound frequency of 693 Hz.

图 13 仿生光纤麦克风方向响应测试装置照片
Fig. 13. Photograph of the experimental setup for testing the directional response of the bionic fiber-optic microphone.
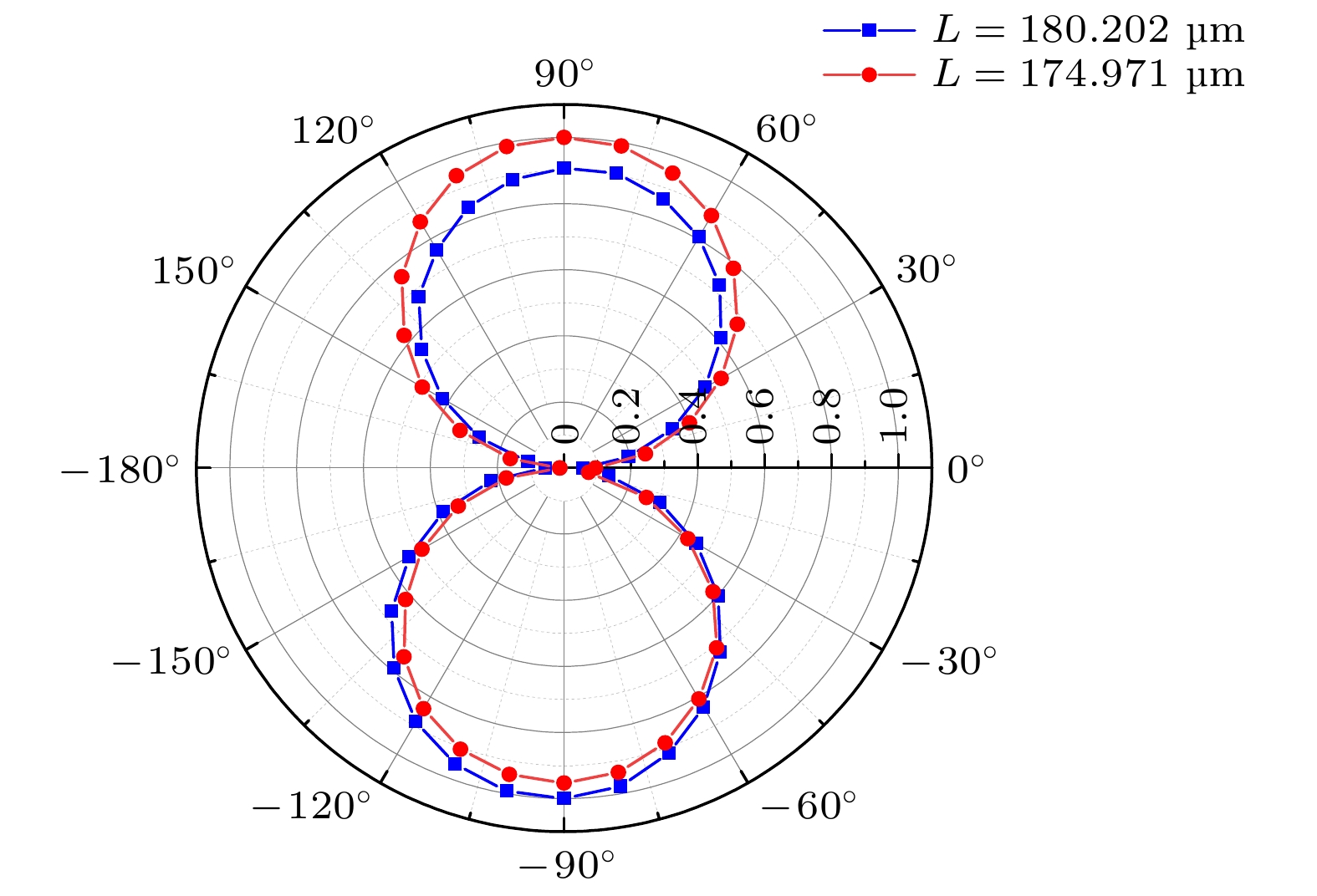
图 14 实验测得的仿生光纤麦克风的双通道对700 Hz声波的“8”字形方向响应极化图
Fig. 14. “8” shaped directional response polar patterns measured at 700 Hz for the two FPI channels of the bionic microphone.
-
[1] Wild G, Hinckley S 2008 IEEE Sens. J. 8 1184
Google Scholar
[2] Wu G M, Xiong L S, Dong Z F, Liu X, Cai C, Qi Z M 2021 J. Appl. Phys. 129 164504
Google Scholar
[3] Tuma J, Janecka P, Vala M, Richter L 2012 International Carpathian Control Conference Grand Hotel Permon, High Tatras, Slovakia, May 28, 2012 p740
[4] Zhu J X, Ren L, Ho S C, Jia Z G, Song G B 2017 Smart Mater. Struct. 26 025022
Google Scholar
[5] Chang X Y, Yang C Q, Shi X F, Li P F, Shi Z G, Chen J M 2018 IEEE 87 th Vehicular Technology Conference (VTC Spring) Porto, Portugal, June 3–6, 2018 p1
[6] Yang C Q, Wu Z X, Chang X Y, Shi X F, Wo J F, Shi Z G 2018 IEEE 10th Sensor Array and Multichannel Signal Processing Workshop (SAM) Sheffield, Britain, July 8–11, 2018 p587
[7] Miles R N, Robert D, Hoy R R 1995 J. Acoust. Soc. Am. 98 3059
Google Scholar
[8] Ishfaque A, Kim B 2016 Sens. Actuators A 250 60
Google Scholar
[9] Miles R N, Cui W, Su Q T, Homentcovschi D 2014 J. Microelectromech. Syst. 24 241
Google Scholar
[10] Touse M, Sinibaldi J, Simsek K, Catterlin J, Harrison S, Karunasiri G 2010 Appl. Phys. Lett. 96 173701
Google Scholar
[11] Touse M, Sinibaldi J, Karunasiri G 2010 IEEE SENSORS 2010 Waikoloa, USA, November 1–4, 2010 p2422
[12] Kuntzman M L, Gloria L J, Hewa-Kasakarage N N, Kim D, Hall N A 2013 Appl. Phys. Lett. 102 054109
Google Scholar
[13] Zhang Y S, Bauer R, Windmill J F, Uttamchandani D 2016 IEEE 29th International Conference on Micro Electro Mechanical Systems (MEMS) Shanghai, China, January 1, 2016 p1114
[14] Bauer R, Zhang Y S, Jackson J C, Whitmer W M, Windmill J 2016 IEEE Sensors Orlando, FL, USA, October 30–November 3, 2016 p1
[15] Bauer R, Zhang Y S, Jackson J C, Whitmer W M 2017 IEEE Sens. J. 17 5529
Google Scholar
[16] Zhang Y S, Bauer R, Jackson J C, Whitmer W M, Windmill J, Deepak U 2018 J. Microelectromech. Syst. 27 667
Google Scholar
[17] Cui W, Bicen B, Hall N, Jones S A, Degertekin F L, Miles R N 2006 19th IEEE International Conference on Micro Electro Mechanical Systems Istanbul, Turkey, January 22–26, 2006 p614
[18] Miles R N, Su Q, Cui W, Shetye M, Degertekin F, Bicen B, Garcia C, Jones S, Hall N 2009 J. Acoust. Soc. Am. 125 2013
Google Scholar
[19] Miles R N, Degertekin L, Cui W, Su Q, Fredrick B 2013 J. Acoust. Soc. Am. 133 3316
Google Scholar
[20] Liu H, Currano L, Gee D, Helms T, Miao Y 2013 Sci. Rep. 3 2489
Google Scholar
[21] 邵斌, 厉东, 张宇晖, 朱文辉, 王建军 2017 环境工程 35 598
Shao B, Li D, Zhang Y H, Zhu W H, Wang J J 2017 Environ. Eng. 35 598
[22] 何柞镛, 赵玉芳 1981 声学理论基础 (北京: 国防工业出版社) 第61—109页
He Z Y, Zhao Y F 1981 Basis of Acoustics Theory (Beijing: National Defense Industry Press) pp61–109 (in Chinese)
[23] 杜功焕, 朱哲民, 龚秀芬 2012 声学基础(第3版) (南京: 南京大学出版社) 第120, 121页
Du G H, Zhu Z M, Gong X F 2012 Acoustic Fundamentals (3rd Ed.) (Nanjing: Nanjing University Press) pp120, 121
[24] Dong Z F, Hu X Y, Ren D P, Xiong L S, Liu X, Deng X, Cai C, Qi Z M 2021 J. Lightwave Technol. 39 7008
Google Scholar
[25] Bucaro J A, Lagakos N, Houston B H, Jarzynski J, Zalalutdinov M 2005 J. Acoust. Soc. Am. 118 1406
Google Scholar
[26] Ren D P, Liu X, Zhang M Y, Gao R, Qi Z M 2021 IEEE Sens. J. 21 14655
Google Scholar
[27] Rahaman A, Kim B 2020 Sci. Rep. 10 1
Google Scholar

 下载:
下载:

计量
- 文章访问数: 10323
- PDF下载量: 194
- 被引次数: 0
