










-
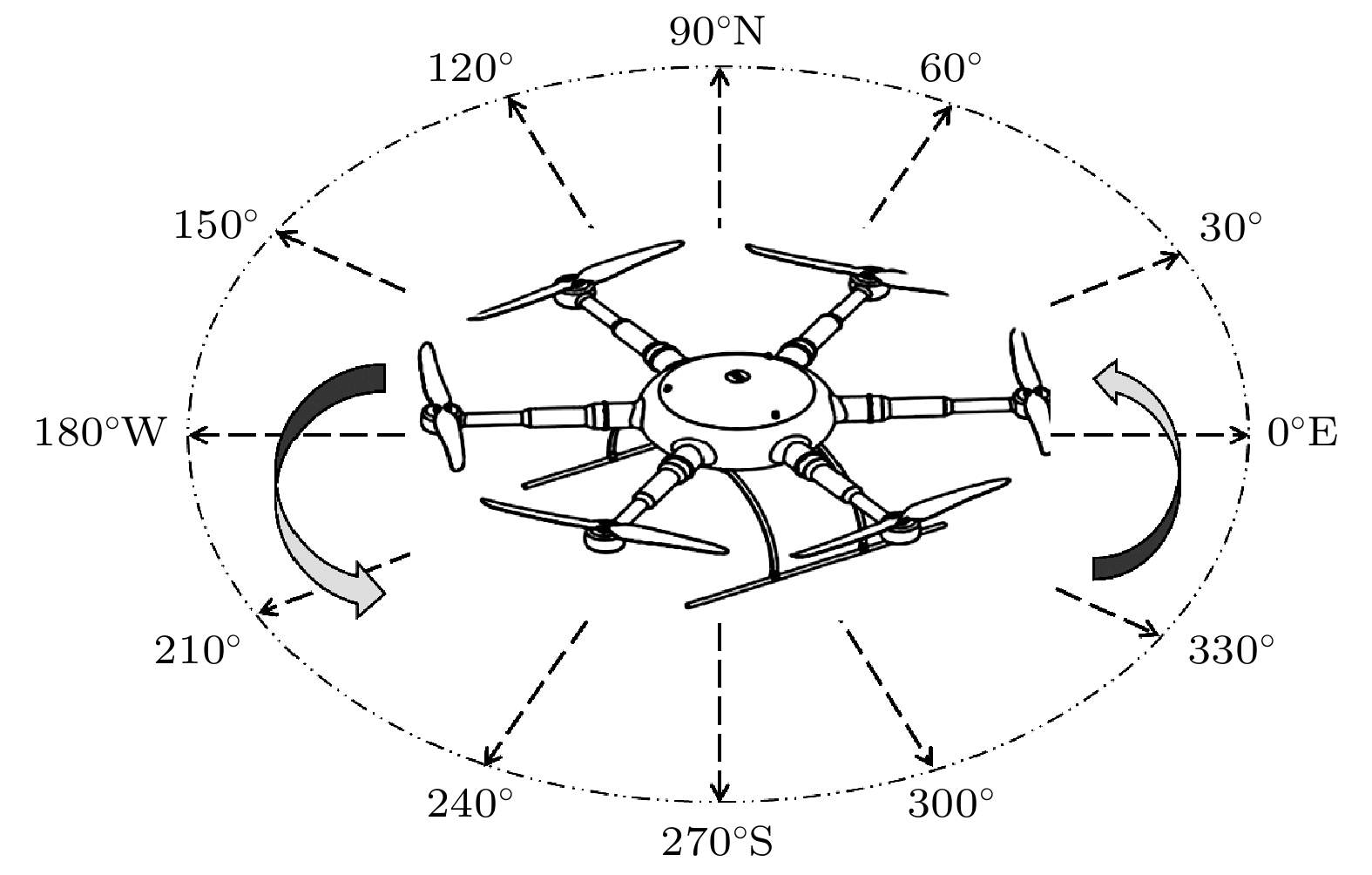
针对机载探测系统的小型化、多角度、多高度、快速同时获取大气多污染物的技术需求, 研制了一套融合多传感实现不同高度和不同方位角的轻量化、低成本的小型差分光学吸收二维机载观测系统, 并将其搭建于旋翼无人机平台上应用于大气环境污染物的观测. 本文详细介绍了研制的旋翼无人机平台和机载差分光学吸收系统构成, 开展了系统稳定性研究, 机载设备偏航角、翻滚角以及俯仰角的角度偏差均值分别为0.07°, –0.13°, –0.12°, 满足监测稳定性要求. 将机载系统与商用地基差分光学吸收系统进行比对观测实验, 比对结果显示二者监测数据相关系数均大于0.92. 最后利用该机载系统开展外场飞行实验, 机载差分系统分别飞行距离水平面至30, 60, 90 m高度进行观测, 观测时仰角设置为0°, 方位角从0°到360°每隔30°进行一次测量, 获得了不同方位角以及不同高度下的NO2, SO2, HCHO浓度分布信息. 研究结果表明该研发系统满足大气多污染物同时快速多角度多高度的探测技术需求.In order to meet the technical requirements for miniaturization, multi-angle, multi-altitude, and fast simultaneous acquisition of atmospheric pollutants, this study develops an integrated, lightweight, and cost-effective airborne differential optical absorption spectroscopy (DOAS) system. This system is designed in order to be used on a rotorcraft unmanned aerial vehicle (UAV) platform for monitoring atmospheric pollutants. The compositions of the hexacopter UAV platform and the airborne DOAS system are detailed in this work. The system includes a multi axis differential optical absorption spectroscopy (MAX-DOAS) spectral acquisition system, a control system, and a flight environment monitoring system. Commands are sent from a computer via serial communication to drive a gimbal, controlling the azimuth angle and elevation angle of the telescope, with a camera recording the light obstruction. The sunlight scattered by the atmosphere is collected by the telescope and transmitted via fiber optics to the spectrometer, which then transmits the data to the control computer. Additionally, the system captures data of altitude, temperature, humidity, and GPS location during flight, and filters out spectral data obtained under abnormal flight conditions. Stability studies indicate that the mean angular deviations for yaw, roll, and pitch are 0.07°, –0.13°, and –0.12° respectively, which meet the requirements for monitoring stability. Comparative experiments with a commercial ground-based DOAS system show that the correlation coefficients between the monitoring data of both systems are both greater than 0.92, confirming the reliability of the airborne system. In field flight experiments, the airborne DOAS system conducts observations at altitudes of 30 m, 60 m, and 90 m, with the elevation angle set at 0° and the azimuth angle measured every 30° from 0° to 360°. The system successfully obtains the concentration distributions of NO2, SO2, and HCHO at different azimuth angles and altitudes. The results indicate that the concentrations of these three gases decrease with altitude increasing, with higher concentrations observed in the southeast direction, indicating the presence of pollution sources in that direction. Further analysis with considering altitude changes indicates that the rate of decrease in NO2 concentration and SO2 concentration slow down with altitude increasing, while the rate of decrease in HCHO remains relatively constant. These findings indicate that this system effectively meets the technical requirements for simultaneous, rapid, multi-angle, and multi-altitude detection of atmospheric pollutants, providing essential support for the detailed monitoring of complex urban micro-environments.
-
Keywords:
- airborne detection system /
- rotary-wing unmanned aerial vehicle /
- two-dimensional differential optical absorption /
- multi-dimensional
[1] Su W J, Liu C, Chan K L, Hu Q H, Liu H, Ji X G, Zhu Y Z, Liu T, Zhang C X, Chen Y J, Liu J G 2020 Atmos. Meas. Tech. 13 6271
 Google Scholar
Google Scholar
[2] Wu S S, Huang B, Wang J H, He L J, Wang Z Y, Yan Z, Lao X Q, Zhang F, Liu R Y, Du Z H 2021 Environ. Pollut. 273 116456
Google Scholar
[3] 徐晋, 谢品华, 司福祺, 李昂, 刘文清 2012 物理学报 61 282
Google Scholar
Xu J, Xie P H, Si F Q, Li A, Liu W Q 2012 Acta Phys. Sin. 61 282
Google Scholar
[4] 梁帅西, 秦敏, 段俊, 方武, 李昂, 徐晋, 卢雪, 唐科, 谢品华, 刘建国 2017 物理学报 66 090704
Google Scholar
Liang S X, Qin M, Duan J, Fang W, Li A, Xu J, Lu X, Tang K, Xie P H, Liu J G 2017 Acta Phys. Sin. 66 090704
Google Scholar
[5] Zhang H K, Huang B, Zhang M, Cao K, Yu L 2015 Int. J. Remote Sens. 36 4411
Google Scholar
[6] Liu M X, Liu X N, Wu L, Zou X Y, Jiang T, Zhao B Y 2018 Remote Sens. 10 772
Google Scholar
[7] Zhou B, Zhang S B, Xue R B, Li J Y, Wang S S 2023 J. Environ. Sci. 123 3
Google Scholar
[8] Pang X B, Chen L, Shi K L, Wu F, Chen J M, Fang S X, Wang J L, Xu M 2021 Sci. Total Environ. 764 142828
Google Scholar
[9] Wu C, Liu B, Wu D, Yang H L, Mao X, Tan J, Liang Y, Sun J Y, Xia R, Sun J R, He G W, Li M, Deng T, Zhou Z, Li Y J 2021 Sci. Total Environ. 801 149689
Google Scholar
[10] Li X M, Xie P H, Li A, Xu J, Ren H M, Ren B, Li Y Y, Li J 2021 J. Environ. Sci. 107 1
Google Scholar
[11] Arroyo P, Gómez-Suárez J, Herrero J L, Lozano J 2022 Sens. Actuators B Chem. 364 131815
Google Scholar
[12] Platt U, Stutz J, Platt U, Stutz J 2008 Differential Absorption Spectroscopy (Berlin Heidelberg: Springer) pp135–174
[13] Liu C, Xing C Z, Hu Q H, Wang S S, Zhao S H, Gao M 2022 Earth Sci. Rev. 226 103958
Google Scholar
[14] Chen X, Chen Y P, Chen Y X, Fang Y X, Yu J X, Sun Y 2023 IEEE International Geoscience and Remote Sensing Symposium United States of America, July 16–21, 2023 p3866
[15] Xing C Z, Liu C, Li Q H, Wang S S, Tan W, Zou T L, Wang Z, Lu C 2024 Sci. Total Environ. 915 169159
Google Scholar
[16] Li L, Lu C, Chan P W, Zhang X, Yang H L, Lan Z J, Zhang W H, Liu Y W, Pan L, Zhang L 2020 Atmos. Environ. 220 117083
Google Scholar
[17] Mo Z W, Huang S, Yuan B, Pei C L, Song Q C, Qi J P, Wang M, Wang B L, Wang C, Shao M 2022 Environ. Pollut. 292 118454
Google Scholar
[18] Chen L, Pang X B, Li J J, Xing B, An T C, Yuan K B, Dai S, Wu Z T, Wang S Q, Wang Q, Mao Y P, Chen J M 2022 Sci. Total Environ. 845 157113
Google Scholar
[19] Zheng Z L, Wang H C, Chen X R, Wang J, Li X, Lu K D, Yu G H, Huang X F, Fan S J 2024 Atmos. Environ. 321 120361
Google Scholar
[20] Hedworth H, Page J, Sohl J, Saad T 2022 Drones 6 253
Google Scholar
[21] 刘进, 司福祺, 周海金, 赵敏杰, 窦科, 王煜, 刘文清 2015 物理学报 64 34217
Google Scholar
Liu J, Si F Q, Zhou H J, Zhao M J, Dou K, Wang Y, Liu W Q 2015 Acta Phys. Sin. 64 34217
Google Scholar
[22] Mou F S, Luo J, Zhang Q J, Zhou C, Wang S, Ye F, Li S W, Sun Y W 2023 Atmosphere 14 739
Google Scholar
[23] Vandaele A C, Hermans C, Simon P C, Carleer M, Colin R, Fally S, Mérienne M F, Jenouvrier A, Coquart B 1998 J. Quant. Spectrosc. Radiat. Transf. 59 171
Google Scholar
[24] Bogumil K, Orphal J, Homann T, Voigt S, Spietz P, Fleischmann O C, Vogel A, Hartmann M, Kromminga H, Bovensmann H, Frerick J, Burrows J P 2003 J. Photoch. Photobio. A 157 167
Google Scholar
[25] Meller R, Moortgat G K 2000 J. Geophys. Res 105 7089
Google Scholar
[26] Serdyuchenko A, Gorshelev V, Weber M, Chehade W, Burrows J P 2014 Atmos. Meas. Tech. 7 625
Google Scholar
[27] Thalman R, Volkamer R 2013 Phys. Chem. Chem. Phys. 15 15371
Google Scholar
[28] Fleischmann O C, Hartmann M, Burrows J P, Orphal J 2004 J. Photochem. Photobiol. A Chem. 168 117
Google Scholar
-
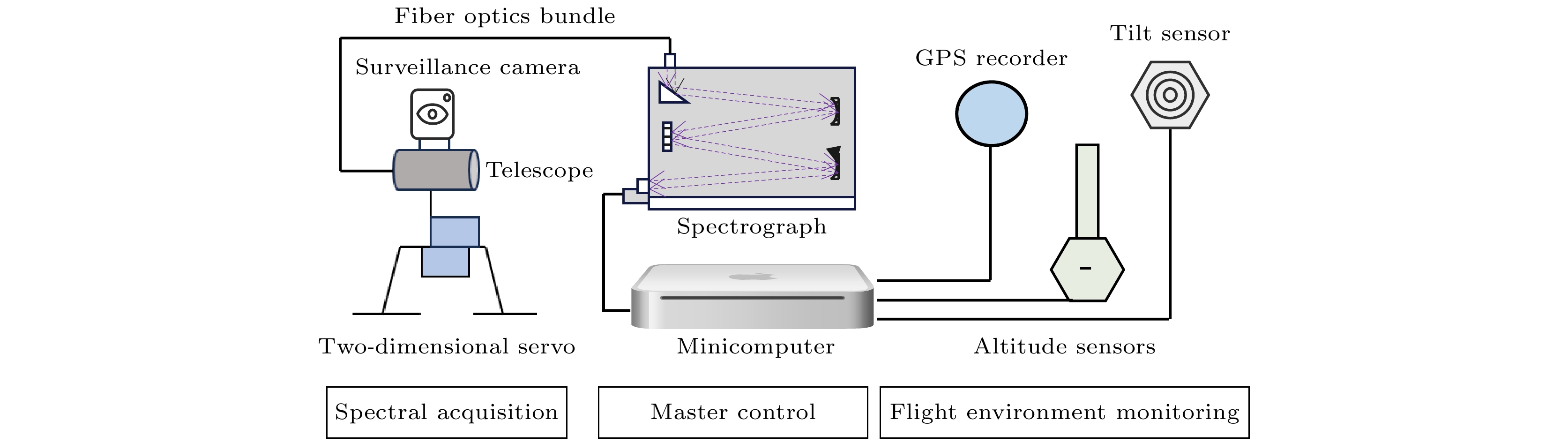
图 2 机载差分光学吸收二维系统结构示意图
Fig. 2. Schematic diagram of the airborne differential optical absorption 2D system.

图 3 旋翼无人机载差分光学吸收二维探测系统实物图
Fig. 3. Photograph of the differential optical absorption 2D detection System mounted on a rotorcraft unmanned aerial vehicle.
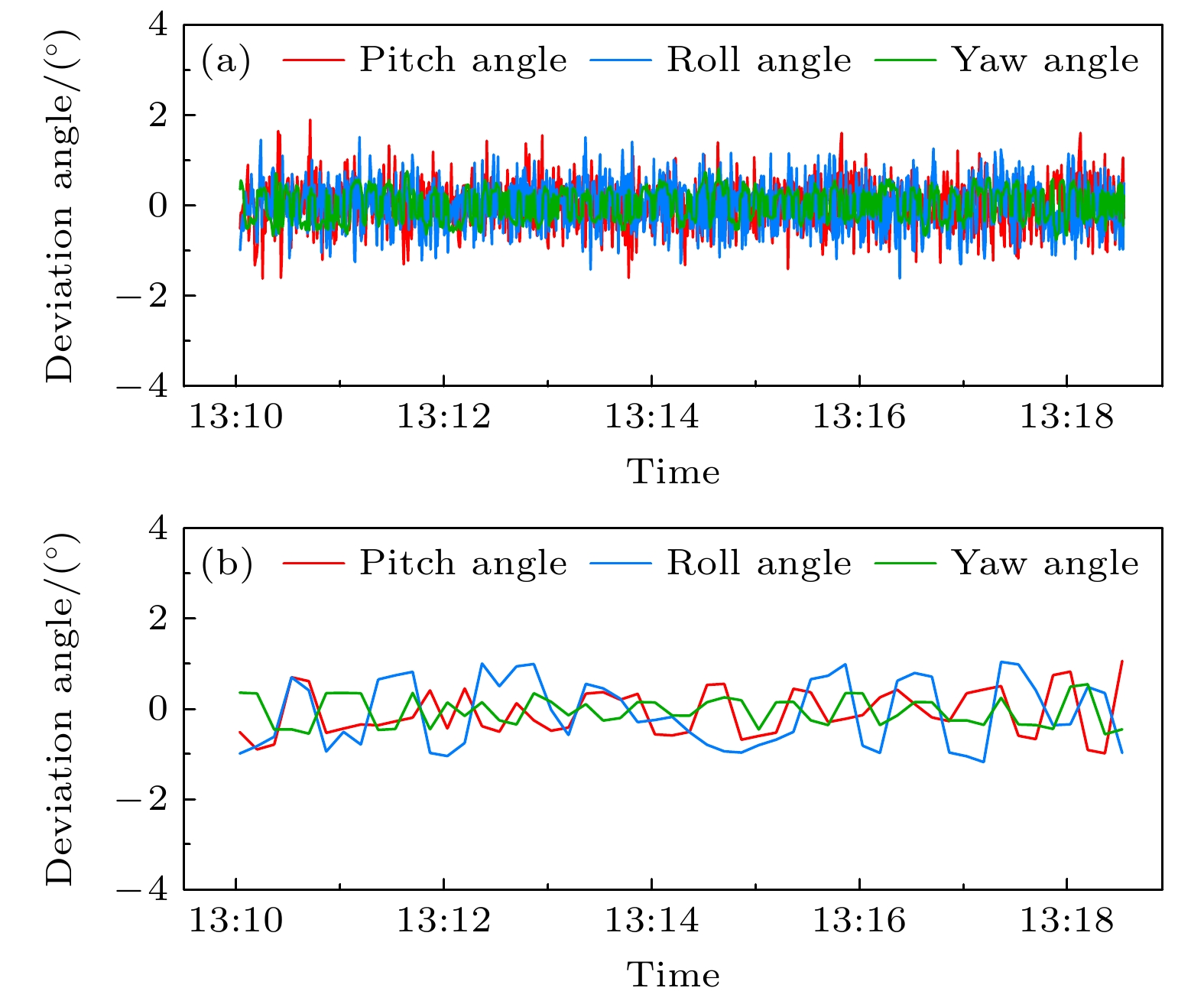
图 4 机载系统3种飞行姿态的角度偏差图 (a) 500 ms采样数据; (b)固定间隔采样数据
Fig. 4. Angle deviation diagram of the three flight attitudes of the airborne system: (a) 500 ms sampled data; (b) data sampled at fixed intervals.
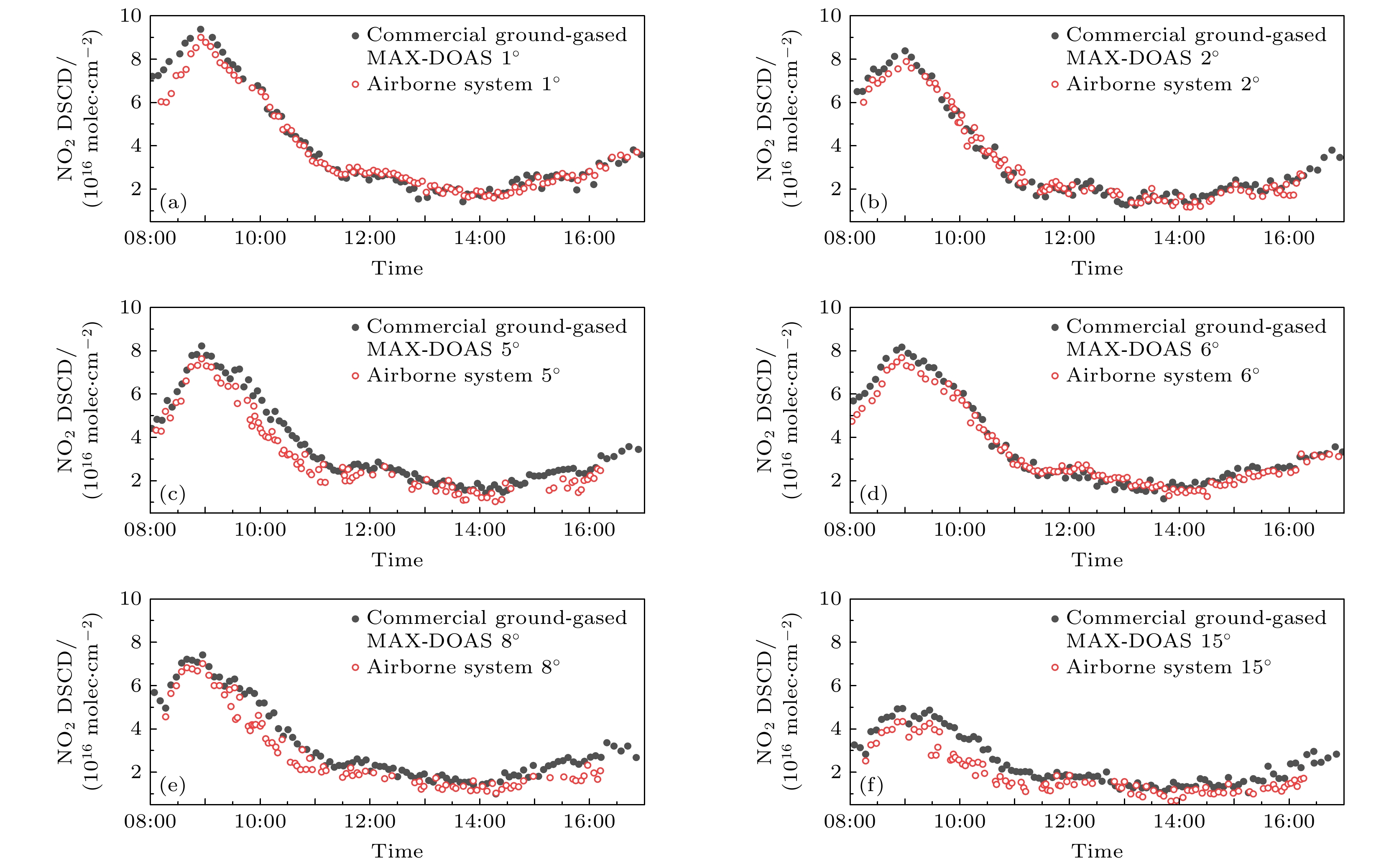
图 5 机载系统与商用地基MAX-DOAS观测的NO2差分斜柱浓度时间序列对比图 (a)仰角为1°; (b)仰角为2°; (c)仰角为5°; (d)仰角为6°; (e)仰角为8°; (f)仰角为15°
Fig. 5. Comparison of NO2 differential slant column density time series observed by airborne system and commercial ground-based MAX-DOAS: (a) Elevation angle of 1°; (b) elevation angle of 2°; (c) elevation angle of 5°; (d) elevation angle of 6°; (e) elevation angle of 8°; (f) elevation angle of 15°.
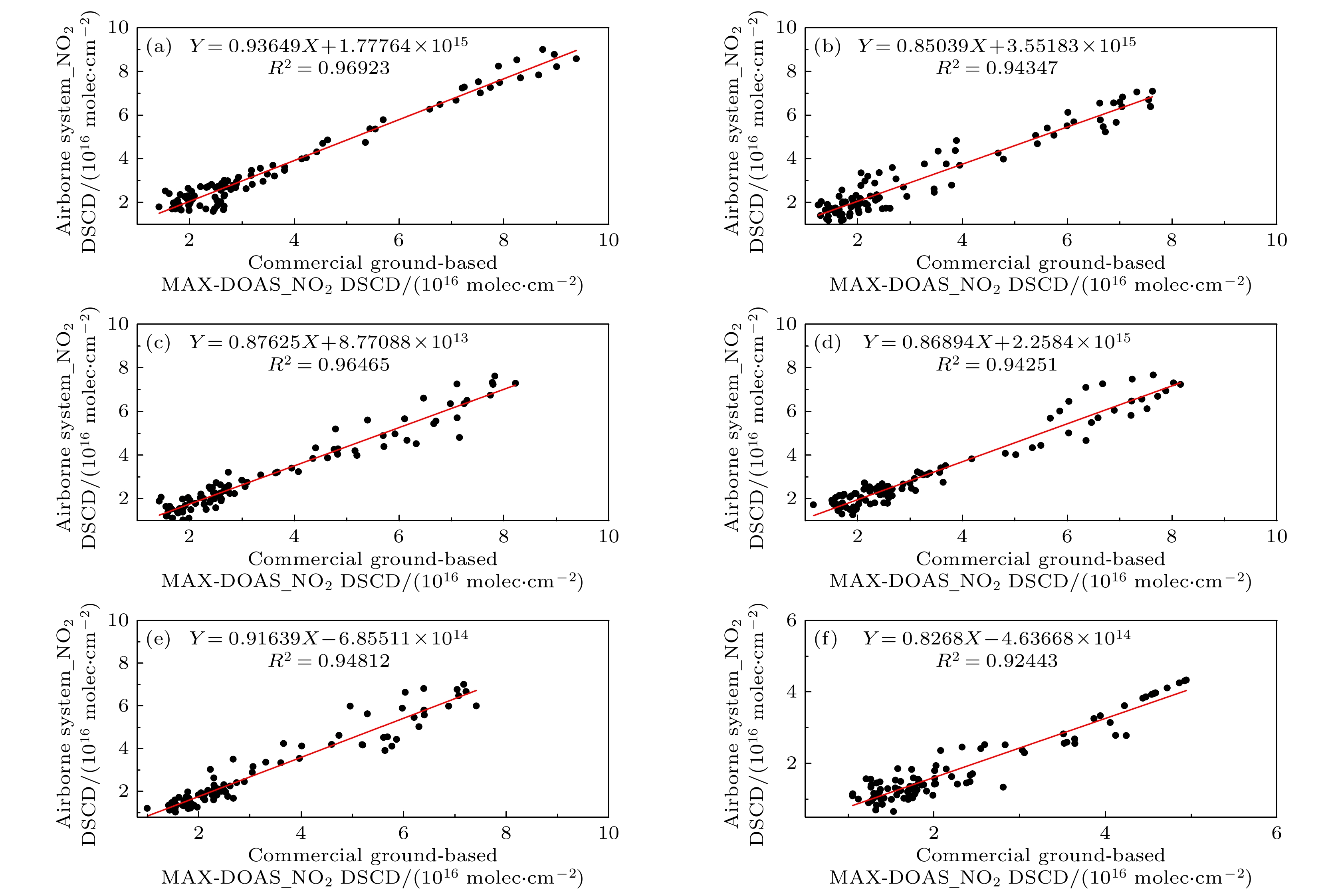
图 6 机载系统与商用地基MAX-DOAS观测的NO2差分斜柱浓度的对比相关图 (a)仰角为1°; (b)仰角为2°; (c)仰角为5°; (d)仰角为6°; (e)仰角为8°; (f)仰角为15°
Fig. 6. Comparison correlation plot of NO2 differential slant column density observed by airborne system and commercial ground-based MAX-DOAS: (a) Elevation angle of 1°; (b) elevation angle of 2°; (c) elevation angle of 5°; (d) elevation angle of 6°; (e) elevation angle of 8°; (f) elevation angle of 15°.

图 7 无人机外场实验 (a)测量地点; (b)实景图
Fig. 7. UAV field experiment: (a) Measurement site; (b) real-world image.
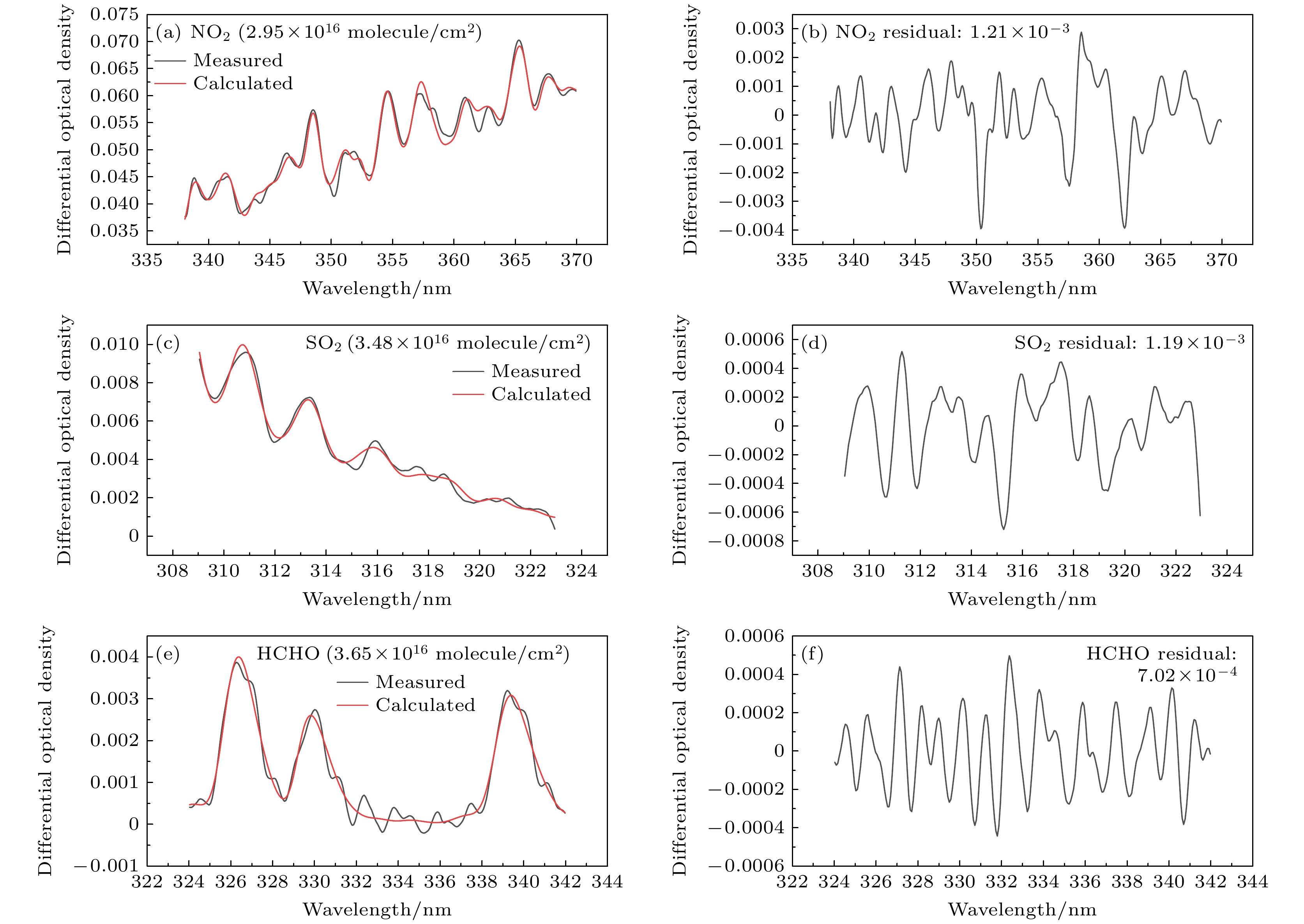
图 9 NO2, SO2, HCHO光谱拟合效果实例 (a) NO2光谱拟合; (b) NO2斜柱浓度拟合残差; (c) SO2光谱拟合; (d) SO2斜柱浓度拟合残差; (e) HCHO光谱拟合; (f) HCHO斜柱浓度拟合残差
Fig. 9. Examples of spectral fitting results for NO2, SO2 and HCHO: (a) NO2 spectral fitting; (b) fitting residuals of NO2 slant column density; (c) SO2 spectral fitting; (d) fitting residuals of SO2 slant column density; (e) HCHO spectral fitting; (f) fitting residuals of HCHO slant column density.
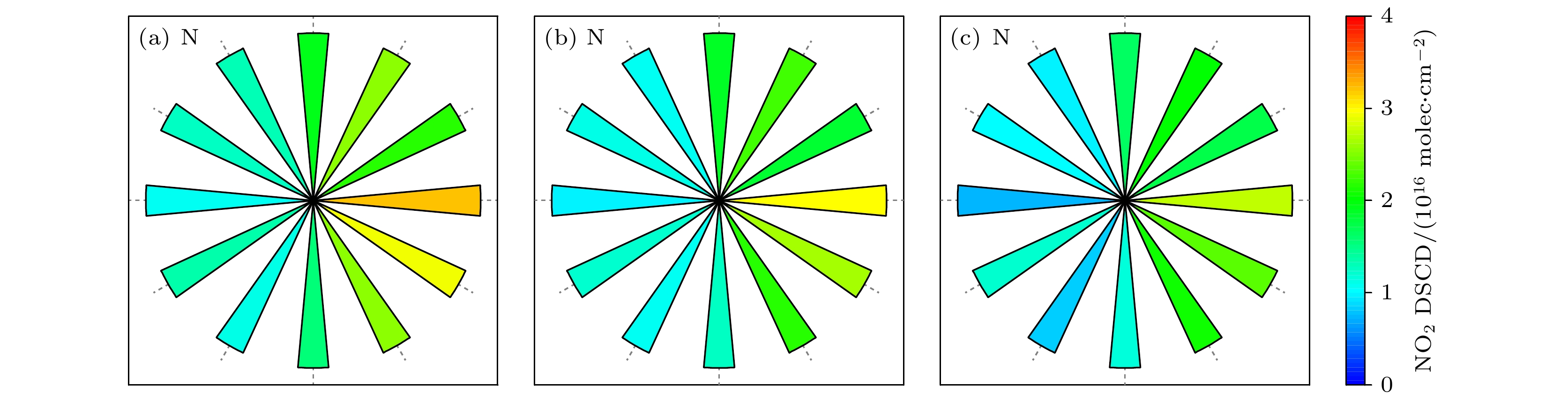
图 10 水平观测下不同高度的NO2浓度分布图 (a)高度为30 m; (b)高度为60 m; (c)高度为90 m
Fig. 10. Distribution of NO2 concentration at different heights under horizontal observation: (a) Height of 30 m; (b) height of 60 m; (c) height of 90 m
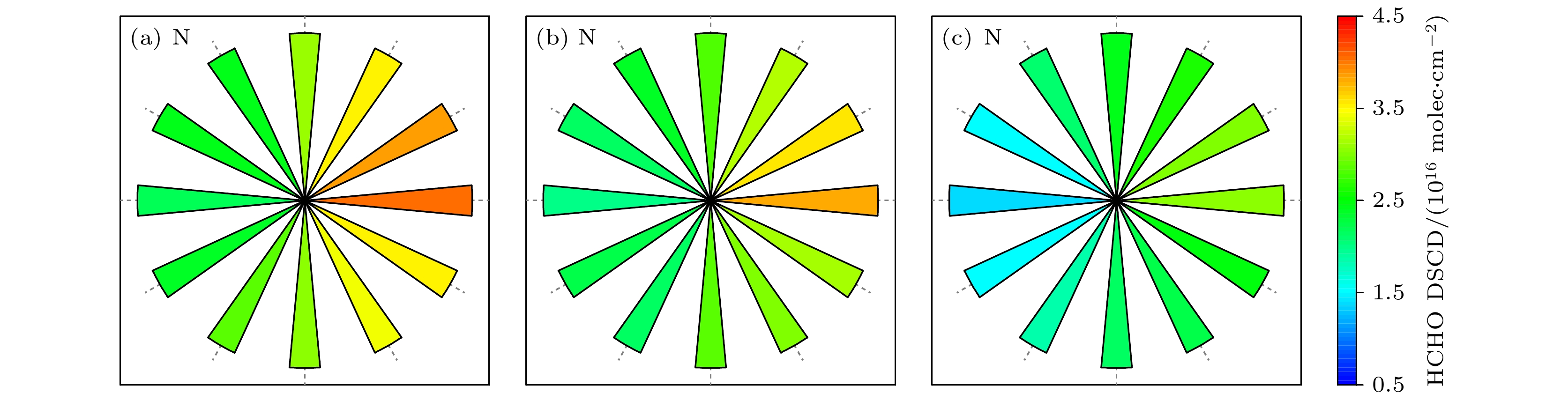
图 12 水平观测下不同高度的HCHO浓度分布图 (a)高度为30 m; (b)高度为60 m; (c)高度为90 m
Fig. 12. Distribution of HCHO concentration at different heights under horizontal observation: (a) Height of 30 m; (b) height of 60 m; (c) height of 90 m.
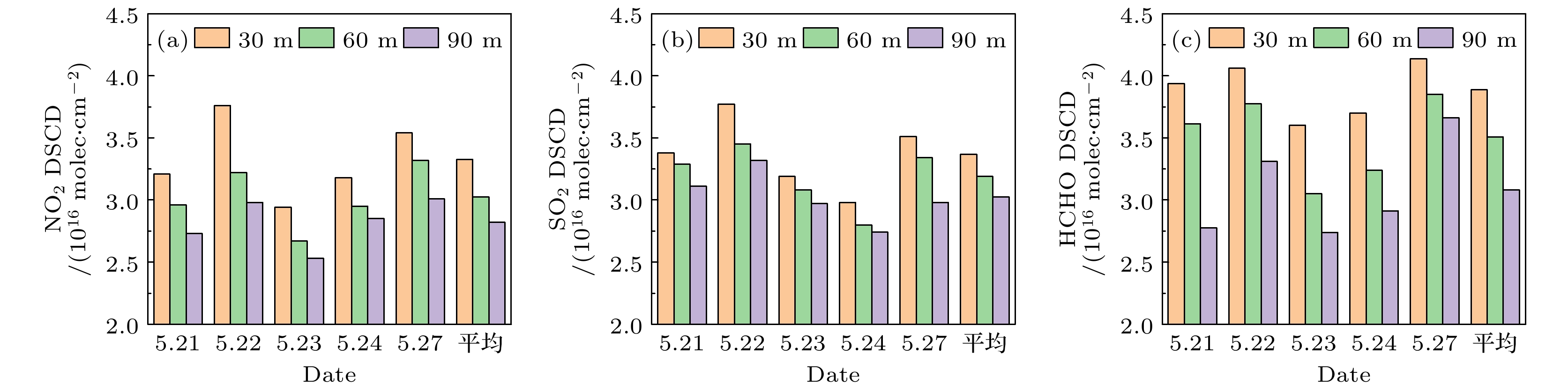
图 13 观测期间0°方位角下不同高度的NO2, SO2, HCHO浓度变化图 (a) NO2; (b) SO2; (c) HCHO
Fig. 13. Variation of NO2, SO2, HCHO concentrations at different heights under 0° azimuth during the observation period: (a) NO2; (b) SO2; (c) HCHO.
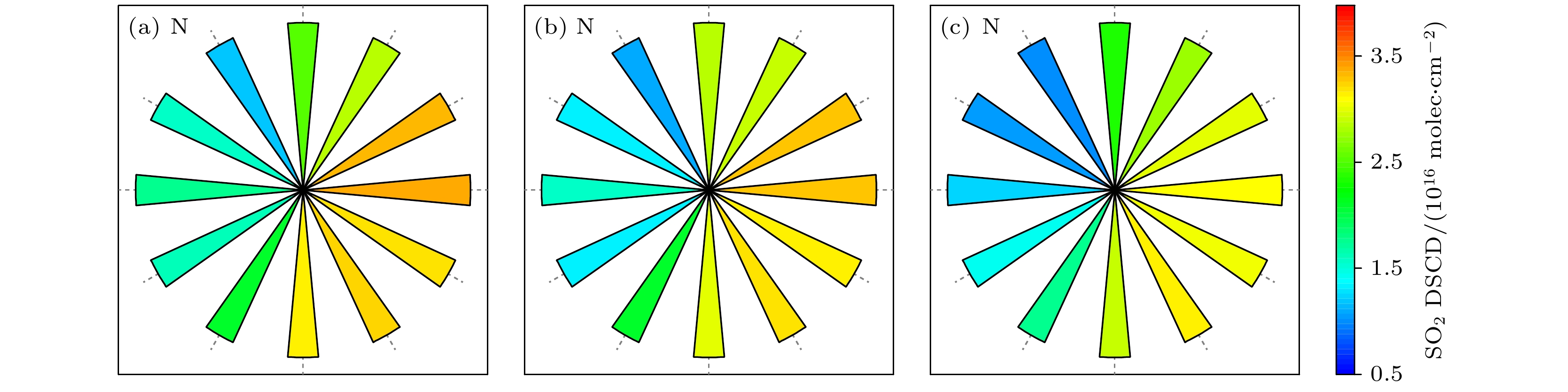
图 11 水平观测下不同高度的SO2浓度分布图 (a)高度为30 m; (b)高度为60 m; (c)高度为90 m
Fig. 11. Distribution of SO2 concentration at different heights under horizontal observation: (a) Height of 30 m; (b) height of 60 m; (c) height of 90 m.
表 1 具体实验拟合参数
Table 1. Specific parameters of experimental fitting.
Parameter NO2 SO2 HCHO Fitting wavelength/nm 337—370 309—323 324—342 Polynomial degree 5 5 5 Intensity offset Constant Constant Constant NO2 220 K, 294 K[23] 294 K[23] 294 K[23] SO2 — 293 K[24] — HCHO 297 K[25] — 297 K[25] O3 223 K, 243 K[26] 223 K, 243 K[26] 223 K, 243 K[26] O4 293 K[27] — 293 K[27] Bro 223 K[28] — — Ring Calculated with FRS Calculated with FRS Calculated with FRS  下载: 导出CSV
下载: 导出CSV
-
[1] Su W J, Liu C, Chan K L, Hu Q H, Liu H, Ji X G, Zhu Y Z, Liu T, Zhang C X, Chen Y J, Liu J G 2020 Atmos. Meas. Tech. 13 6271
Google Scholar
[2] Wu S S, Huang B, Wang J H, He L J, Wang Z Y, Yan Z, Lao X Q, Zhang F, Liu R Y, Du Z H 2021 Environ. Pollut. 273 116456
Google Scholar
[3] 徐晋, 谢品华, 司福祺, 李昂, 刘文清 2012 物理学报 61 282
Google Scholar
Xu J, Xie P H, Si F Q, Li A, Liu W Q 2012 Acta Phys. Sin. 61 282
Google Scholar
[4] 梁帅西, 秦敏, 段俊, 方武, 李昂, 徐晋, 卢雪, 唐科, 谢品华, 刘建国 2017 物理学报 66 090704
Google Scholar
Liang S X, Qin M, Duan J, Fang W, Li A, Xu J, Lu X, Tang K, Xie P H, Liu J G 2017 Acta Phys. Sin. 66 090704
Google Scholar
[5] Zhang H K, Huang B, Zhang M, Cao K, Yu L 2015 Int. J. Remote Sens. 36 4411
Google Scholar
[6] Liu M X, Liu X N, Wu L, Zou X Y, Jiang T, Zhao B Y 2018 Remote Sens. 10 772
Google Scholar
[7] Zhou B, Zhang S B, Xue R B, Li J Y, Wang S S 2023 J. Environ. Sci. 123 3
Google Scholar
[8] Pang X B, Chen L, Shi K L, Wu F, Chen J M, Fang S X, Wang J L, Xu M 2021 Sci. Total Environ. 764 142828
Google Scholar
[9] Wu C, Liu B, Wu D, Yang H L, Mao X, Tan J, Liang Y, Sun J Y, Xia R, Sun J R, He G W, Li M, Deng T, Zhou Z, Li Y J 2021 Sci. Total Environ. 801 149689
Google Scholar
[10] Li X M, Xie P H, Li A, Xu J, Ren H M, Ren B, Li Y Y, Li J 2021 J. Environ. Sci. 107 1
Google Scholar
[11] Arroyo P, Gómez-Suárez J, Herrero J L, Lozano J 2022 Sens. Actuators B Chem. 364 131815
Google Scholar
[12] Platt U, Stutz J, Platt U, Stutz J 2008 Differential Absorption Spectroscopy (Berlin Heidelberg: Springer) pp135–174
[13] Liu C, Xing C Z, Hu Q H, Wang S S, Zhao S H, Gao M 2022 Earth Sci. Rev. 226 103958
Google Scholar
[14] Chen X, Chen Y P, Chen Y X, Fang Y X, Yu J X, Sun Y 2023 IEEE International Geoscience and Remote Sensing Symposium United States of America, July 16–21, 2023 p3866
[15] Xing C Z, Liu C, Li Q H, Wang S S, Tan W, Zou T L, Wang Z, Lu C 2024 Sci. Total Environ. 915 169159
Google Scholar
[16] Li L, Lu C, Chan P W, Zhang X, Yang H L, Lan Z J, Zhang W H, Liu Y W, Pan L, Zhang L 2020 Atmos. Environ. 220 117083
Google Scholar
[17] Mo Z W, Huang S, Yuan B, Pei C L, Song Q C, Qi J P, Wang M, Wang B L, Wang C, Shao M 2022 Environ. Pollut. 292 118454
Google Scholar
[18] Chen L, Pang X B, Li J J, Xing B, An T C, Yuan K B, Dai S, Wu Z T, Wang S Q, Wang Q, Mao Y P, Chen J M 2022 Sci. Total Environ. 845 157113
Google Scholar
[19] Zheng Z L, Wang H C, Chen X R, Wang J, Li X, Lu K D, Yu G H, Huang X F, Fan S J 2024 Atmos. Environ. 321 120361
Google Scholar
[20] Hedworth H, Page J, Sohl J, Saad T 2022 Drones 6 253
Google Scholar
[21] 刘进, 司福祺, 周海金, 赵敏杰, 窦科, 王煜, 刘文清 2015 物理学报 64 34217
Google Scholar
Liu J, Si F Q, Zhou H J, Zhao M J, Dou K, Wang Y, Liu W Q 2015 Acta Phys. Sin. 64 34217
Google Scholar
[22] Mou F S, Luo J, Zhang Q J, Zhou C, Wang S, Ye F, Li S W, Sun Y W 2023 Atmosphere 14 739
Google Scholar
[23] Vandaele A C, Hermans C, Simon P C, Carleer M, Colin R, Fally S, Mérienne M F, Jenouvrier A, Coquart B 1998 J. Quant. Spectrosc. Radiat. Transf. 59 171
Google Scholar
[24] Bogumil K, Orphal J, Homann T, Voigt S, Spietz P, Fleischmann O C, Vogel A, Hartmann M, Kromminga H, Bovensmann H, Frerick J, Burrows J P 2003 J. Photoch. Photobio. A 157 167
Google Scholar
[25] Meller R, Moortgat G K 2000 J. Geophys. Res 105 7089
Google Scholar
[26] Serdyuchenko A, Gorshelev V, Weber M, Chehade W, Burrows J P 2014 Atmos. Meas. Tech. 7 625
Google Scholar
[27] Thalman R, Volkamer R 2013 Phys. Chem. Chem. Phys. 15 15371
Google Scholar
[28] Fleischmann O C, Hartmann M, Burrows J P, Orphal J 2004 J. Photochem. Photobiol. A Chem. 168 117
Google Scholar


 下载:
下载:
计量
- 文章访问数: 4263
- PDF下载量: 126
- 被引次数: 0
